- Системы координат станков с ЧПУ

Содержание
- 2. Для станков с ЧПУ принята единая система координат, рекомендуемая Международной организацией по стандартизации (ISO), - прямоугольная
- 3. В станках с ЧПУ координатные оси всегда ориентированы параллельно направляющим станка. В зависимости от типа станка
- 4. Правило правой руки: если мысленно поместить ладонь правой руки в начало координат таким образом, чтобы ось
- 5. Система координат токарного станка с ЧПУ с горизонтальным расположением шпинделя имеет только две оси
- 6. Система координат токарного станка с ЧПУ с вертикальным расположением шпинделя
- 7. Горизонтально-фрезерный станок имеет, как правило, три оси координат
- 8. Вертикально-фрезерный станок, как правило, также имеет три оси координат
- 9. В современной механообработке часто возникает необходимость в изготовлении столь сложных поверхностей, что это невозможно осуществить путем
- 10. Многоцелевой четырехкоординатный станок с ЧПУ В системе координат Данного станка помимо трех декартовых осей координат имеется
- 11. Полярная система координат Ось вращения вокруг оси X обозначается как ось А, ось вращения вокруг оси
- 13. Скачать презентацию
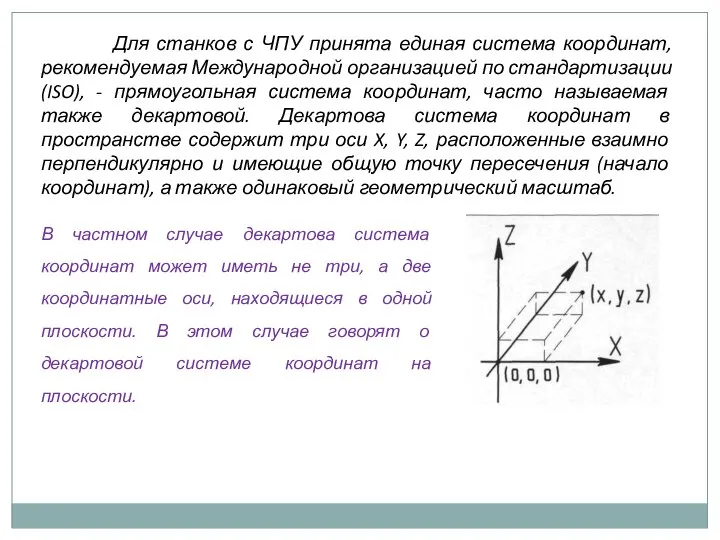
Для станков с ЧПУ принята единая система координат, рекомендуемая Международной
Для станков с ЧПУ принята единая система координат, рекомендуемая Международной
В станках с ЧПУ координатные оси всегда ориентированы параллельно направляющим станка.
В станках с ЧПУ координатные оси всегда ориентированы параллельно направляющим станка.
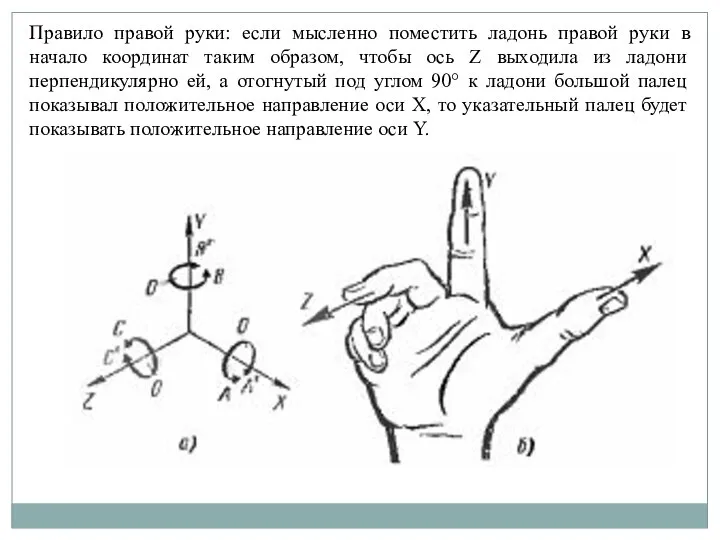
Правило правой руки: если мысленно поместить ладонь правой руки в начало
Правило правой руки: если мысленно поместить ладонь правой руки в начало

Система координат токарного станка с ЧПУ с горизонтальным расположением шпинделя имеет
Система координат токарного станка с ЧПУ с горизонтальным расположением шпинделя имеет

Система координат токарного станка с ЧПУ с вертикальным расположением шпинделя
Система координат токарного станка с ЧПУ с вертикальным расположением шпинделя
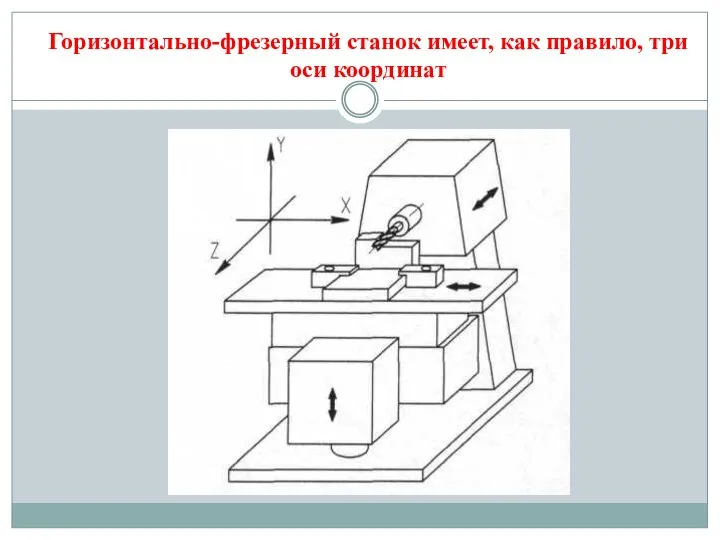
Горизонтально-фрезерный станок имеет, как правило, три оси координат
Горизонтально-фрезерный станок имеет, как правило, три оси координат

Вертикально-фрезерный станок, как правило, также имеет три оси координат
Вертикально-фрезерный станок, как правило, также имеет три оси координат
В современной механообработке часто возникает необходимость в изготовлении столь сложных поверхностей,
В современной механообработке часто возникает необходимость в изготовлении столь сложных поверхностей,
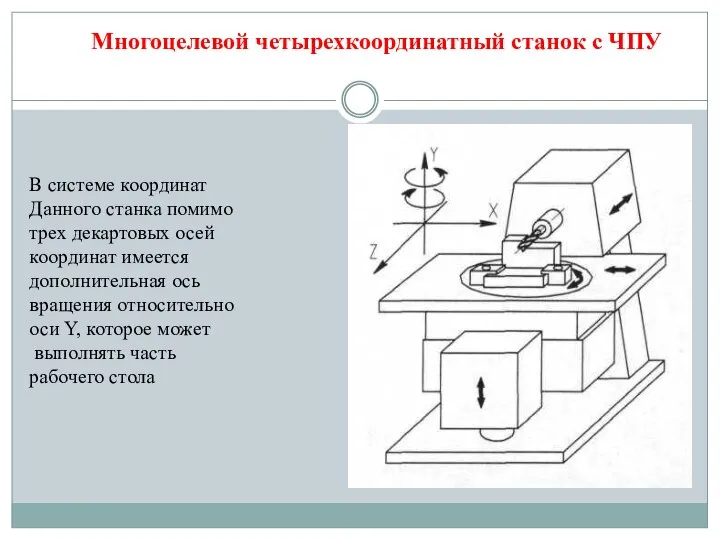
Многоцелевой четырехкоординатный станок с ЧПУ
В системе координат
Данного станка помимо
Многоцелевой четырехкоординатный станок с ЧПУ
В системе координат
Данного станка помимо
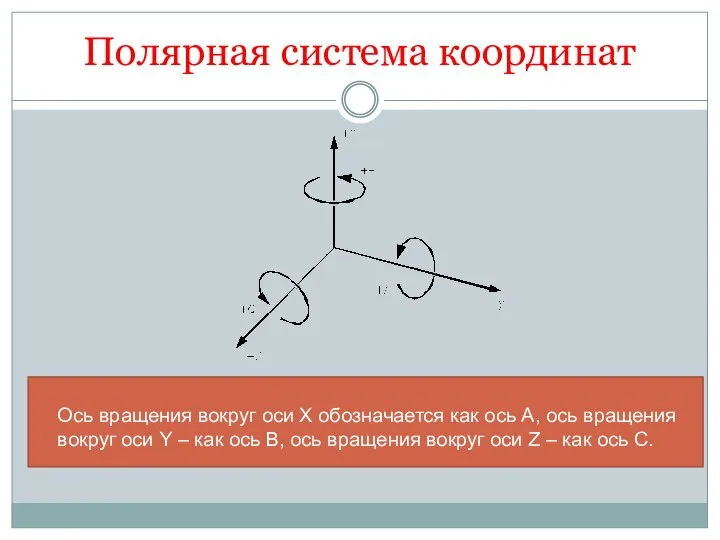
Полярная система координат
Ось вращения вокруг оси X обозначается как ось А,
Полярная система координат
Ось вращения вокруг оси X обозначается как ось А,
 Повышение эффективности взаимодействия транспортных средств и погрузочно-разгрузочных машин и механизмов на примере ООО ПЭК
Повышение эффективности взаимодействия транспортных средств и погрузочно-разгрузочных машин и механизмов на примере ООО ПЭК Ферментация (брожение)
Ферментация (брожение) Евангельские Христиане- Баптисты (ЕХБ)
Евангельские Христиане- Баптисты (ЕХБ) Дослідження технологічних особливостей камерного електрошлакового переплаву
Дослідження технологічних особливостей камерного електрошлакового переплаву Камеры и беспилотники
Камеры и беспилотники Загадки Слова о полку Игореве
Загадки Слова о полку Игореве Краткая история развития сельского хозяйства
Краткая история развития сельского хозяйства LJ51 ремонт
LJ51 ремонт Технические средства реабилитации для лиц с инвалидностью
Технические средства реабилитации для лиц с инвалидностью Одежда. Обувь. Головные уборы
Одежда. Обувь. Головные уборы Производство
Производство 20140129_otkrytyy_urok_9
20140129_otkrytyy_urok_9 Изучение охраняемых растений окрестностей села Флюговка
Изучение охраняемых растений окрестностей села Флюговка Электричество и магнетизм
Электричество и магнетизм Управление структурой операционных затрат при лезвийной обработке материалов на основе инноваций
Управление структурой операционных затрат при лезвийной обработке материалов на основе инноваций Буддизм – одна из трёх мировых религий
Буддизм – одна из трёх мировых религий Дизайн интерьера и его истоки-1
Дизайн интерьера и его истоки-1 Нефтегазовая компания ОАО Лукойл
Нефтегазовая компания ОАО Лукойл Введение в технологию редких и радиоактивных элементов
Введение в технологию редких и радиоактивных элементов Геохимические методы поисков нефти и газа
Геохимические методы поисков нефти и газа Датчики положения. Разновидности и сферы применения
Датчики положения. Разновидности и сферы применения Перенос сроков в системе ЕОС-Качество_07.09 (3)
Перенос сроков в системе ЕОС-Качество_07.09 (3) Портрет, деталирование
Портрет, деталирование Презентация Microsoft Office PowerPoint
Презентация Microsoft Office PowerPoint 20120713_prezentaciya1_5
20120713_prezentaciya1_5 Сольфеджио 7/7 тема урока : Ритмический аккомпанемент
Сольфеджио 7/7 тема урока : Ритмический аккомпанемент Маршрутная сеть Орджоникидзевского района города Перми с 1 апреля 2020 года
Маршрутная сеть Орджоникидзевского района города Перми с 1 апреля 2020 года Технология газовой сварки чугуна
Технология газовой сварки чугуна