- Технологии искусственного интеллекта

Содержание
- 2. 1.1. Базы знаний, экспертные и многоагентные системы. Раздел 1. Введение 1. Понятие искусственного интеллекта. 2. Предметная
- 3. Раздел 4. Экспертные системы 11. Экспертные системы – программирование, ориентированное на правила. Причины успешного практического использования
- 4. Раздел 6. Основы методологии разработки экспертных систем 22. Основные этапы разработки экспертных систем и их взаимосвязь.
- 5. Разработка алгоритма навигации антропоморфного робота
- 6. Разработка элементов системы управления робота-автомобиля
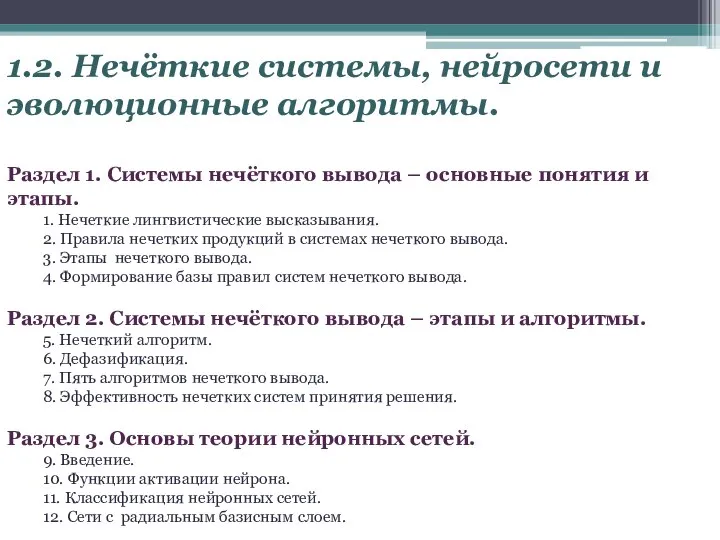
- 7. 1.2. Нечёткие системы, нейросети и эволюционные алгоритмы. Раздел 1. Системы нечёткого вывода – основные понятия и
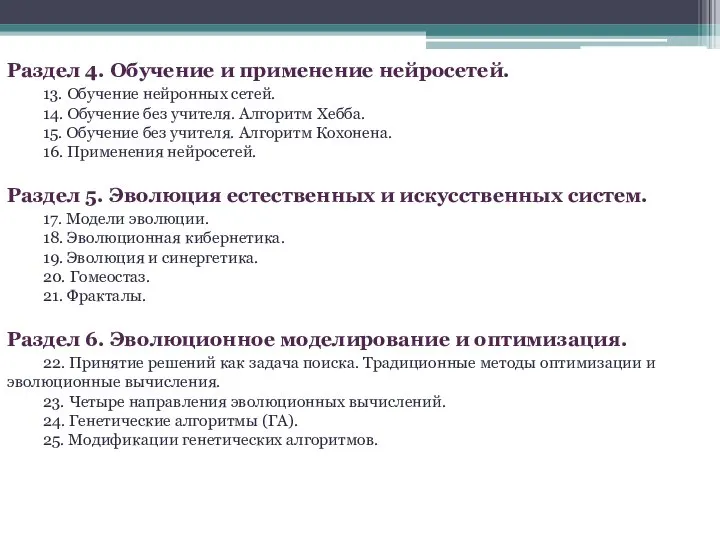
- 8. Раздел 4. Обучение и применение нейросетей. 13. Обучение нейронных сетей. 14. Обучение без учителя. Алгоритм Хебба.
- 9. Области применения интеллектуальных технологий управления в зависимости от сложности задачи и количества параметров
- 10. Модель нечёткого управления
- 11. Моделирование ассоциативной памяти антропоморфного робота
- 12. Оптимизация генетическими алгоритмами (ГА)
- 13. Эволюционный подбор оптимальных электродвигателей и редукторов манипулятора антропоморфного робота
- 14. МОДУЛЬ 2 Алгоритмы систем технического зрения.
- 15. 1. Операции обработки изображений Структура цифрового изображения. Категории, уровни и назначение операций обработки изображения. Основные проблемы
- 16. 13. Свертка и кросс-корреляция. Обработка изображений посредством масок сводящихся к свертке функций. Параллельные вычисления. 14. Анализ
- 17. 25. Представление областей. Сохранение характеристик найденных областей для последующего использования. 26. Обнаружение контуров. Выделение граничных сегментов
- 18. Система технического зрения для робота АР-600
- 19. Обнаружение контуров Выделение граничных сегментов на полутоновом изображении Детектор краев Кэнни генерирует тонкие фрагменты контуров изображения.
- 20. Анализ изображения в ходе захвата предмета: Получение образа предмета
- 21. МОДУЛЬ 3 Разработка под ROS/Simulink и особенности эксплуатации в космосе.
- 22. 3.1. Разработка под Robot Operation System (ROS) 1. Использование сред трехмерного моделирования для построения полигональных моделей
- 24. Программное обеспечение для AR-600
- 25. 3.2 Использование Simulink и его специальных приложений для построения комплексных динамических моделей роботов. Раздел 1. Simulink.
- 26. Раздел 2. Физическое моделирование механических систем с помощью SimMechanics 1. Введение в SimMechanics. 2. Ознакомление со
- 27. Раздел 3. Физическое моделирование мультидисциплинарных систем в Simscape 1. Cоздание электрических, механических и гидравлических моделей. Понимание
- 29. Оптимизация манипулятора робота
- 30. Использование Simulink при оптимизации манипулятора робота Получим следующую схему SimMechanics: Запустим симуляцию и увидим, что модель
- 31. 3.3. Особенности эксплуатации робототехнических систем в космосе. 1. Общая качественная характеристика ближнего космоса (околоземного пространства): высоты
- 34. Скачать презентацию
1.1. Базы знаний, экспертные и многоагентные системы.
Раздел 1. Введение
1. Понятие искусственного
1.1. Базы знаний, экспертные и многоагентные системы.
Раздел 1. Введение
1. Понятие искусственного
Раздел 4. Экспертные системы
11. Экспертные системы – программирование, ориентированное на правила.
Раздел 4. Экспертные системы
11. Экспертные системы – программирование, ориентированное на правила.
Раздел 6. Основы методологии разработки экспертных систем
22. Основные этапы разработки экспертных
Раздел 6. Основы методологии разработки экспертных систем
22. Основные этапы разработки экспертных
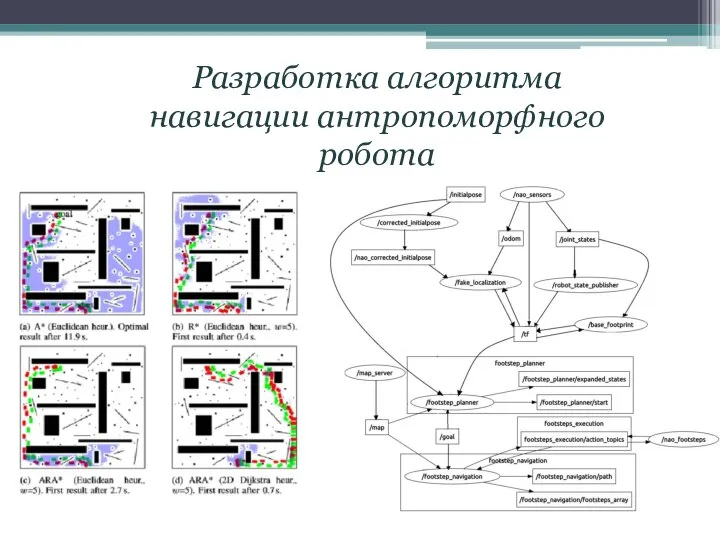
Разработка алгоритма навигации антропоморфного робота
Разработка алгоритма навигации антропоморфного робота

Разработка элементов системы управления робота-автомобиля
Разработка элементов системы управления робота-автомобиля
1.2. Нечёткие системы, нейросети и эволюционные алгоритмы.
Раздел 1. Системы нечёткого вывода
1.2. Нечёткие системы, нейросети и эволюционные алгоритмы.
Раздел 1. Системы нечёткого вывода
Раздел 4. Обучение и применение нейросетей.
13. Обучение нейронных сетей.
14. Обучение без учителя.
Раздел 4. Обучение и применение нейросетей.
13. Обучение нейронных сетей.
14. Обучение без учителя.
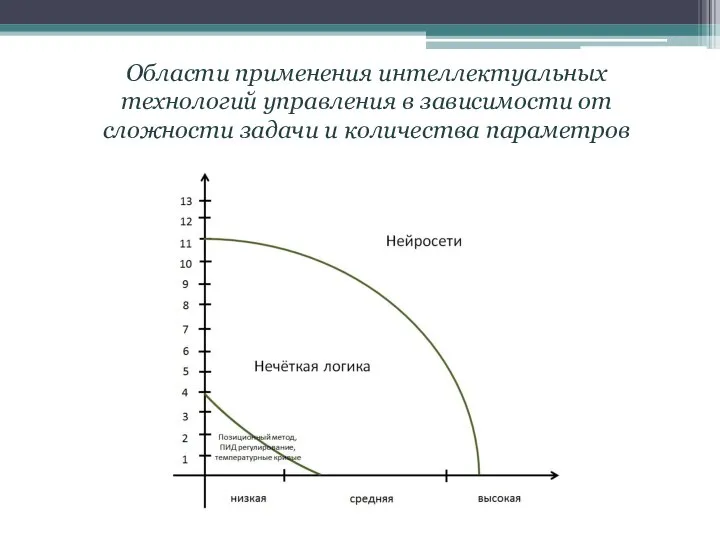
Области применения интеллектуальных технологий управления в зависимости от сложности задачи и
Области применения интеллектуальных технологий управления в зависимости от сложности задачи и
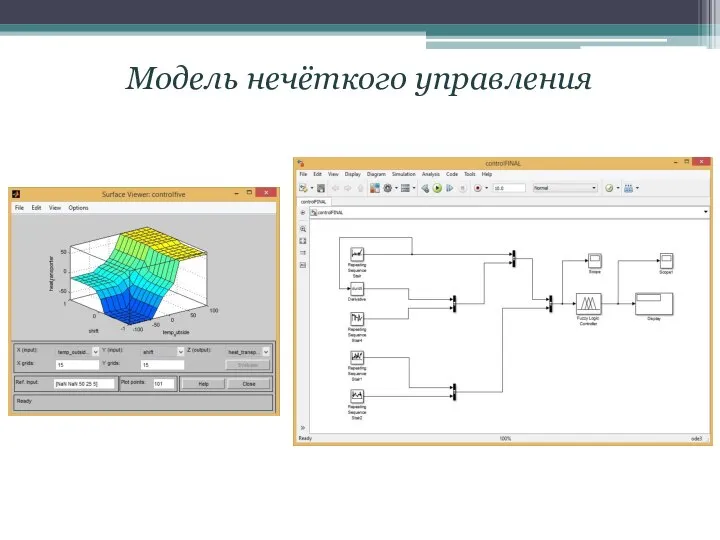
Модель нечёткого управления
Модель нечёткого управления
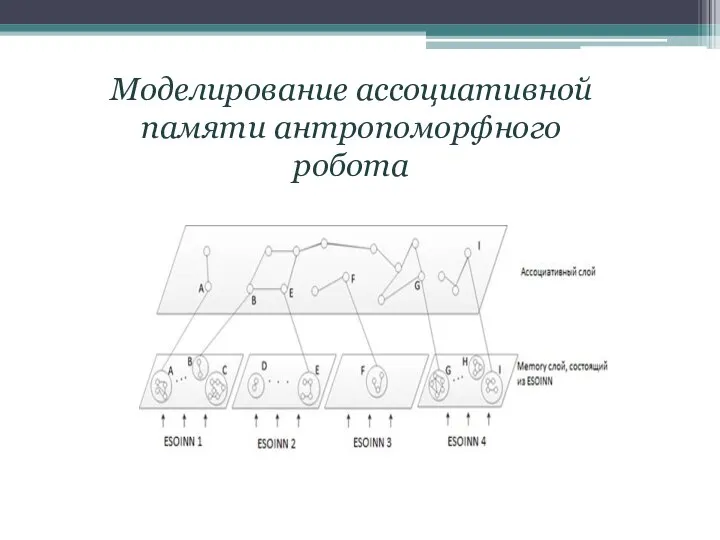
Моделирование ассоциативной памяти антропоморфного робота
Моделирование ассоциативной памяти антропоморфного робота
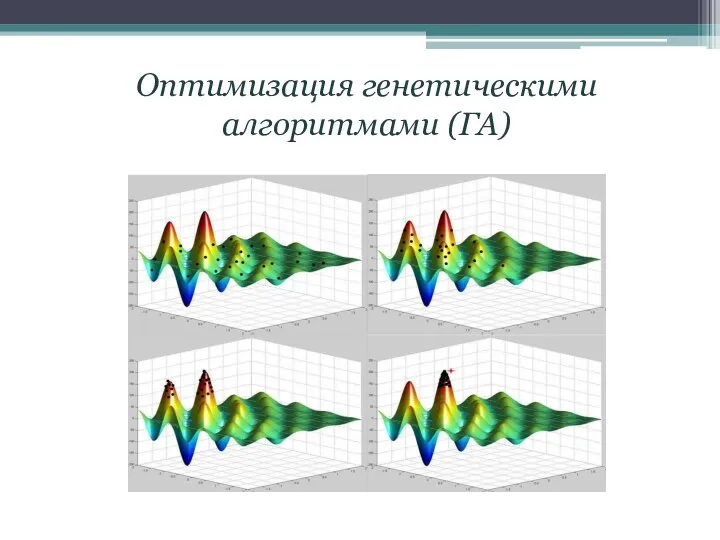
Оптимизация генетическими алгоритмами (ГА)
Оптимизация генетическими алгоритмами (ГА)
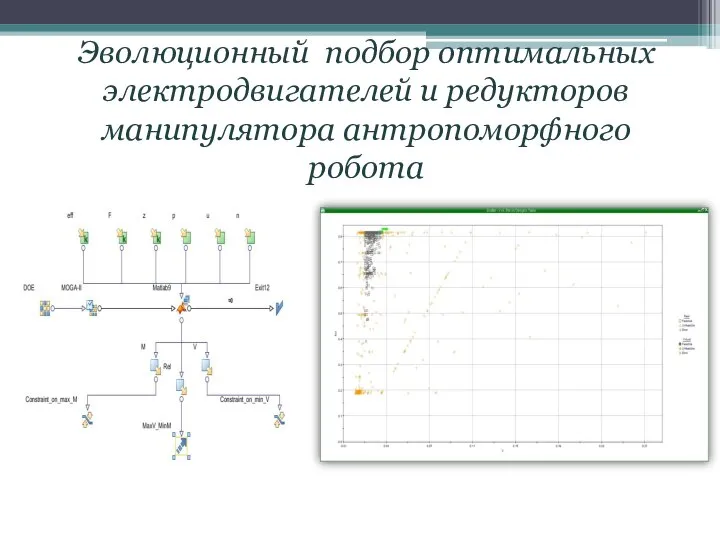
Эволюционный подбор оптимальных электродвигателей и редукторов манипулятора антропоморфного робота
Эволюционный подбор оптимальных электродвигателей и редукторов манипулятора антропоморфного робота
МОДУЛЬ 2
Алгоритмы систем технического зрения.
МОДУЛЬ 2
Алгоритмы систем технического зрения.
1. Операции обработки изображений
Структура цифрового изображения. Категории, уровни и назначение операций
1. Операции обработки изображений
Структура цифрового изображения. Категории, уровни и назначение операций
13. Свертка и кросс-корреляция.
Обработка изображений посредством масок сводящихся к свертке функций.
13. Свертка и кросс-корреляция.
Обработка изображений посредством масок сводящихся к свертке функций.
25. Представление областей.
Сохранение характеристик найденных областей для последующего использования.
26. Обнаружение контуров.
Выделение
25. Представление областей.
Сохранение характеристик найденных областей для последующего использования.
26. Обнаружение контуров.
Выделение
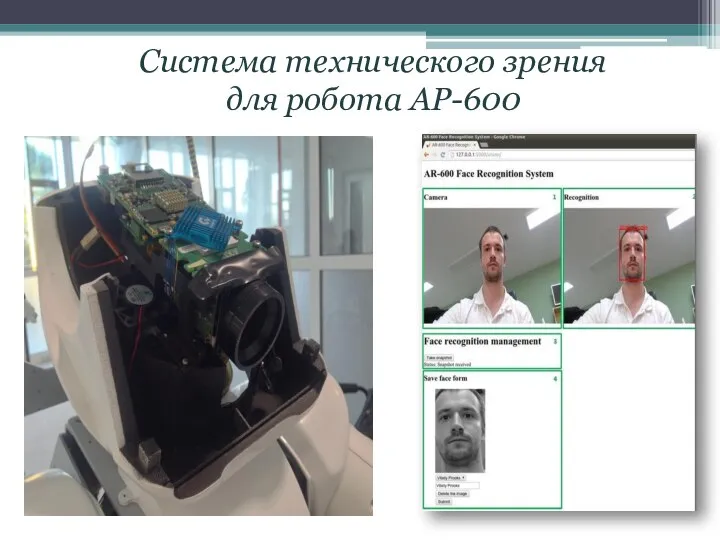
Система технического зрения
для робота АР-600
Система технического зрения
для робота АР-600
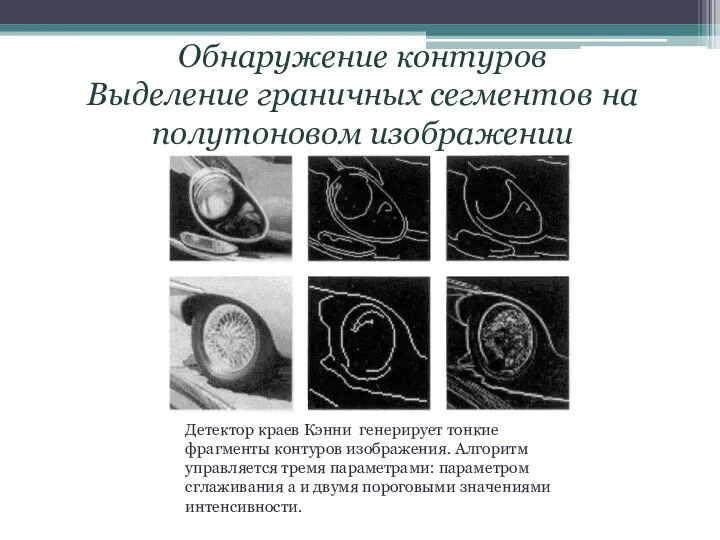
Обнаружение контуров
Выделение граничных сегментов на полутоновом изображении
Детектор краев Кэнни генерирует тонкие
Обнаружение контуров
Выделение граничных сегментов на полутоновом изображении
Детектор краев Кэнни генерирует тонкие
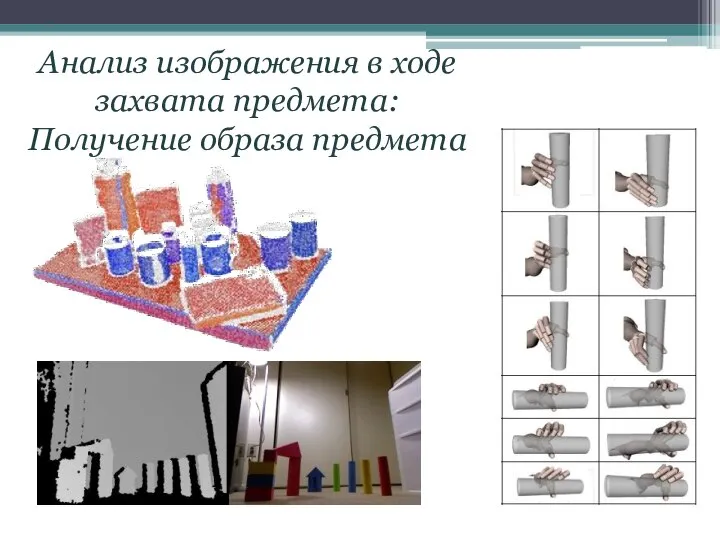
Анализ изображения в ходе захвата предмета:
Получение образа предмета
Анализ изображения в ходе захвата предмета:
Получение образа предмета
МОДУЛЬ 3
Разработка под ROS/Simulink и особенности эксплуатации в космосе.
МОДУЛЬ 3
Разработка под ROS/Simulink и особенности эксплуатации в космосе.
3.1. Разработка под Robot Operation System (ROS)
1. Использование сред трехмерного
3.1. Разработка под Robot Operation System (ROS)
1. Использование сред трехмерного


Программное обеспечение для AR-600
Программное обеспечение для AR-600
3.2 Использование Simulink и его специальных приложений для построения комплексных динамических
3.2 Использование Simulink и его специальных приложений для построения комплексных динамических
Раздел 2. Физическое моделирование механических систем с помощью SimMechanics
1. Введение в
Раздел 2. Физическое моделирование механических систем с помощью SimMechanics
1. Введение в
Раздел 3. Физическое моделирование мультидисциплинарных систем в Simscape
1. Cоздание электрических, механических
Раздел 3. Физическое моделирование мультидисциплинарных систем в Simscape
1. Cоздание электрических, механических

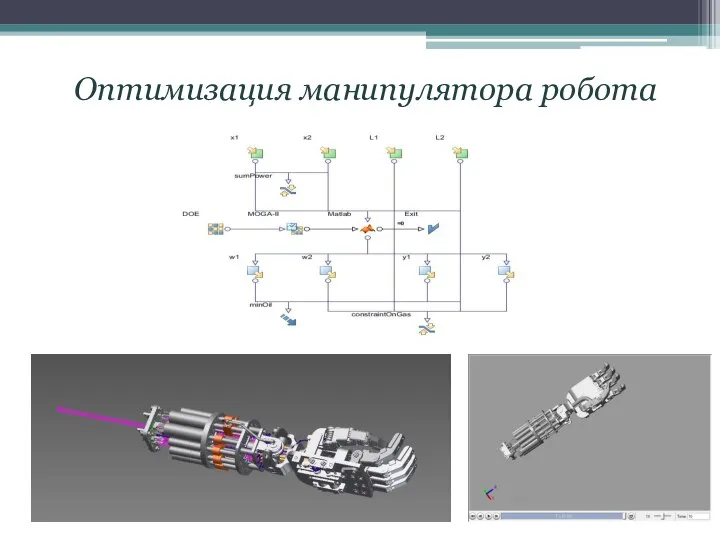
Оптимизация манипулятора робота
Оптимизация манипулятора робота
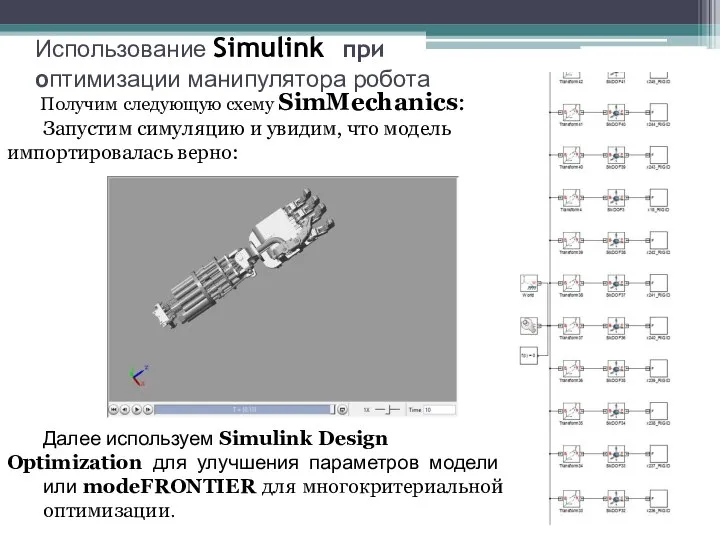
Использование Simulink при оптимизации манипулятора робота
Получим следующую схему SimMechanics:
Запустим симуляцию и
Использование Simulink при оптимизации манипулятора робота
Получим следующую схему SimMechanics:
Запустим симуляцию и
3.3. Особенности эксплуатации робототехнических систем в космосе.
1. Общая качественная характеристика ближнего
3.3. Особенности эксплуатации робототехнических систем в космосе.
1. Общая качественная характеристика ближнего

 Компоновка и конструкции деталей корпусной мебели
Компоновка и конструкции деталей корпусной мебели занятие1 Марина
занятие1 Марина Машины для посева
Машины для посева Аттестационная работа
Аттестационная работа School_Memory game
School_Memory game Мир авиации
Мир авиации Вычислительные комплексы в расчетах строительных конструкций
Вычислительные комплексы в расчетах строительных конструкций 20170327_3-2
20170327_3-2 Шешендік нерді насихаттау жолдары
Шешендік нерді насихаттау жолдары РФ-работа
РФ-работа ЗОЖ - лайфхаки для студентов
ЗОЖ - лайфхаки для студентов Презентация Час безопасности по БДД август 2022г. Новойл
Презентация Час безопасности по БДД август 2022г. Новойл СОВРЕМЕННЫЙ РУССКИЙ ЯЗЫК
СОВРЕМЕННЫЙ РУССКИЙ ЯЗЫК Причины возникновения ошибок при передаче текста Нового Завета
Причины возникновения ошибок при передаче текста Нового Завета Война в судьбе моей семьи
Война в судьбе моей семьи What can animal do
What can animal do Подача мяча двумя руками из-за головы. Игра Перестрелка
Подача мяча двумя руками из-за головы. Игра Перестрелка School timetable
School timetable Воспитание толерантности на уроках социальных дисциплин
Воспитание толерантности на уроках социальных дисциплин Электротехника и электроника
Электротехника и электроника Читайте детям книги
Читайте детям книги Измерение частоты и интервалов времени
Измерение частоты и интервалов времени 17 сентября 2017 года - День работников леса
17 сентября 2017 года - День работников леса Презентация МБ практика иммунитет
Презентация МБ практика иммунитет Поздравь свою библиотеку
Поздравь свою библиотеку Выбор направлений развития производственной системы судостроения
Выбор направлений развития производственной системы судостроения Понятие и длительность производственного цикла
Понятие и длительность производственного цикла Раскрой плечевого изделия
Раскрой плечевого изделия