- Управление двигателем постоянного тока

Содержание
- 2. Управляем через транзистор 2N2222/P2N2222 Для сборки схемы понадобятся транзистор 2N2222 (как вариант P2N2222, BC547, 2N3904, N2222A,
- 3. Управляем через транзистор 2N2222/P2N2222 Для этого проекта нам понадобятся следующие электронные компонеты: Плата Arduino, подключенная к
- 4. Управляем через транзистор 2N2222/P2N2222 Ниже приведены шаги, при подключении двигателей с помощью транзистора: Подключите ноль питания
- 5. Управляем через транзистор 2N2222/P2N2222 Подключите эмиттер транзистора к минусу питания GND, используя минусовую шину питания макетной
- 6. Управляем через транзистор 2N2222/P2N2222
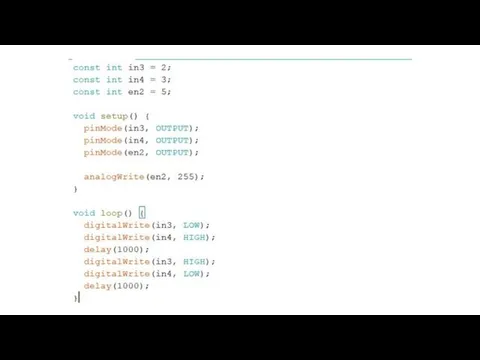
- 7. Код программы Arduino
- 8. Как это работает Транзисторы это очень полезные компоненты, которые, к сожалению, трудно понять. Мы можем представить
- 9. Как это работает
- 10. Как это работает Когда мы подаем логическую единицу на выход Arduino, ток проходит от вывода через
- 11. Как это работает Важным компонентом проекта является диод, о котором не стоит забывать. Как уже было
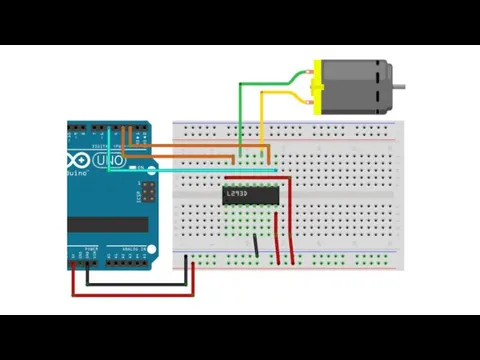
- 12. Драйвер L293D Существует множество готовых микросхем, которые позволяют управлять разными типами двигателей. Мы рассмотри драйвер L293D.
- 13. Драйвер L293D Микросхема представляет собой два H-моста, а значит можно управлять сразу двумя двигателями. Каждый мост
- 14. Драйвер L293D +V — питание микросхема, 5В; +Vmotor — питание двигателей, до 36В; 0V — земля;
- 15. Выводы En1 и En2 служат для отключения или включения мостов. Если мы подаём 0 на En,
- 17. Скетч для вращения двигателя, меняя направление каждую секунду. Функция analogWrite() с помощью ШИМ-сигнала управляет мощностью двигателя.
- 20. Скачать презентацию

Управляем через транзистор 2N2222/P2N2222
Для сборки схемы понадобятся транзистор 2N2222 (как вариант
Управляем через транзистор 2N2222/P2N2222
Для сборки схемы понадобятся транзистор 2N2222 (как вариант
Управляем через транзистор 2N2222/P2N2222
Для этого проекта нам понадобятся следующие электронные компонеты:
Плата
Управляем через транзистор 2N2222/P2N2222
Для этого проекта нам понадобятся следующие электронные компонеты:
Плата
Управляем через транзистор 2N2222/P2N2222
Ниже приведены шаги, при подключении двигателей с помощью
Управляем через транзистор 2N2222/P2N2222
Ниже приведены шаги, при подключении двигателей с помощью
Управляем через транзистор 2N2222/P2N2222
Подключите эмиттер транзистора к минусу питания GND, используя
Управляем через транзистор 2N2222/P2N2222
Подключите эмиттер транзистора к минусу питания GND, используя

Управляем через транзистор 2N2222/P2N2222
Управляем через транзистор 2N2222/P2N2222
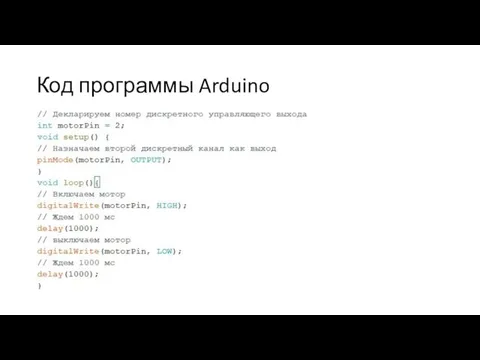
Код программы Arduino
Код программы Arduino
Как это работает
Транзисторы это очень полезные компоненты, которые, к сожалению, трудно
Как это работает
Транзисторы это очень полезные компоненты, которые, к сожалению, трудно

Как это работает
Как это работает
Как это работает
Когда мы подаем логическую единицу на выход Arduino, ток
Как это работает
Когда мы подаем логическую единицу на выход Arduino, ток
Как это работает
Важным компонентом проекта является диод, о котором не стоит
Как это работает
Важным компонентом проекта является диод, о котором не стоит

Драйвер L293D
Существует множество готовых микросхем, которые позволяют управлять разными типами двигателей.
Драйвер L293D
Существует множество готовых микросхем, которые позволяют управлять разными типами двигателей.
Драйвер L293D
Микросхема представляет собой два H-моста, а значит можно управлять сразу
Драйвер L293D
Микросхема представляет собой два H-моста, а значит можно управлять сразу

Драйвер L293D
+V — питание микросхема, 5В;
+Vmotor — питание двигателей, до 36В;
0V
Драйвер L293D
+V — питание микросхема, 5В;
+Vmotor — питание двигателей, до 36В;
0V
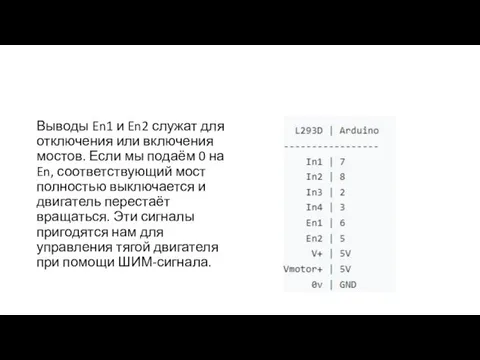
Выводы En1 и En2 служат для отключения или включения мостов. Если
Выводы En1 и En2 служат для отключения или включения мостов. Если
Скетч для вращения двигателя, меняя направление каждую секунду. Функция analogWrite() с
Скетч для вращения двигателя, меняя направление каждую секунду. Функция analogWrite() с
 Взаимодействие с родителями и специализированными учреждениями для определения
Взаимодействие с родителями и специализированными учреждениями для определения Анализ сравнения тампонажного материала на основе применения алюмосиликатных микросфер
Анализ сравнения тампонажного материала на основе применения алюмосиликатных микросфер Портфолио. Виряскин Григорий Николаевич
Портфолио. Виряскин Григорий Николаевич Чудеса Иисуса Христа
Чудеса Иисуса Христа Сонячні батареї
Сонячні батареї Вентиляция горных выработок
Вентиляция горных выработок Полезные ископаемые. Нефть
Полезные ископаемые. Нефть 20180315_chelovek_slaven_dobrymi_delami
20180315_chelovek_slaven_dobrymi_delami Актуальные вопросы реализации социальных гарантий сотрудникам ОВД
Актуальные вопросы реализации социальных гарантий сотрудникам ОВД Повітропідігрівник з труб плоскоовальної форми для котла ГМ-50-14
Повітропідігрівник з труб плоскоовальної форми для котла ГМ-50-14 Презентация
Презентация Развитие требований к сочетанию дорог с ландшафтом
Развитие требований к сочетанию дорог с ландшафтом Внутри себя
Внутри себя Ко Дню матери (3 класс)
Ко Дню матери (3 класс) Авиамоделизм
Авиамоделизм Dolphin тілдік білім беру орталығы
Dolphin тілдік білім беру орталығы Проектное фото жилого комплекса
Проектное фото жилого комплекса GALAXY_GUARDS
GALAXY_GUARDS Реконструкция водопропускных труб
Реконструкция водопропускных труб National features of the Russian people
National features of the Russian people Зустріч з Володимиром Олександровичем П`янковим
Зустріч з Володимиром Олександровичем П`янковим Шахматы
Шахматы Презентация Технологические процессы по ТО и Ремонту автомобилей
Презентация Технологические процессы по ТО и Ремонту автомобилей Дон детей своих сзывает…
Дон детей своих сзывает… In Harmony With Nature
In Harmony With Nature Отгадай ютубера по картинке 1
Отгадай ютубера по картинке 1 Презентация_КасымовМ
Презентация_КасымовМ ПРИМЕР презентациии 'СП Здоровая планета'
ПРИМЕР презентациии 'СП Здоровая планета'