- Устройство и рабочее оборудование землеройной техники, применяемой для ведения АСДНР

Содержание
- 2. Характеристика грунтов и способы их разработки. Классификация и общая характеристика рабочего оборудования спасательной техники. Классификация, характеристика
- 3. Литература: Учебники "Машины инженерного вооружения", кн.1, 2, 4, Воениздат, М-86. Васильченков В.Ф.,Военные гусеничные машины, часть 1
- 4. 1. Характеристика грунтов и способы их разработки.
- 6. Рис. 1.2. Модель грунта: а — немерзлого; б — мерзлого; V0 — общий объем грунта
- 7. Рис. 1.3. Идеализированная модель грунта: 1 — линейно-упругий элемент; 2 — вязкий элемент; 3 — пластичный
- 8. Под физическими свойствами подразумеваются те свойства, которые отражают физическое состояние грунта. К ним относятся: - плотность,
- 9. Плотность — это отношение массы грунта т при естественной влажности к его объему V: ρг =
- 10. Влажность — это отношение массы воды, содержащейся в порах некоторого объема грунта, к массе грунта, высушенного
- 11. В зависимости от степени влажности природные грунты могут находиться в различном состоянии (рис. 1.4): твердом, пластичном
- 12. Пластичность — это способность грунта изменять свою форму без изменения объема. Показателем свойства пластичности является число
- 13. Липкость — это способность грунта прилипать к рабочим поверхностям машины при соприкосновении. Она оказывает существенное влияние
- 14. Разрыхляемость — это способность грунта увеличиваться в объеме при разработке. В процессе разработки грунт превращается в
- 15. Пористость — это отношение объема пор (независимо от того, чем они заполнены) в грунте ко всему
- 16. Примерзаемость — это способность грунта примерзать к частям рабочего органа при отрицательной температуре. Во время замерзания
- 17. Связность. Частицы грунта находятся между собой в той или иной степени связи. При наличии сильной связи
- 18. Рис. 1.6. Зависимость напряжения от деформации и скорости ее возрастания: σ— напряжение в грунте; Δh —
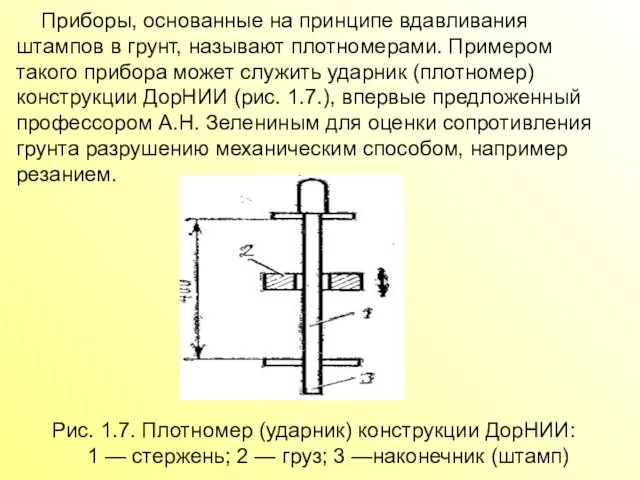
- 19. Приборы, основанные на принципе вдавливания штампов в грунт, называют плотномерами. Примером такого прибора может служить ударник
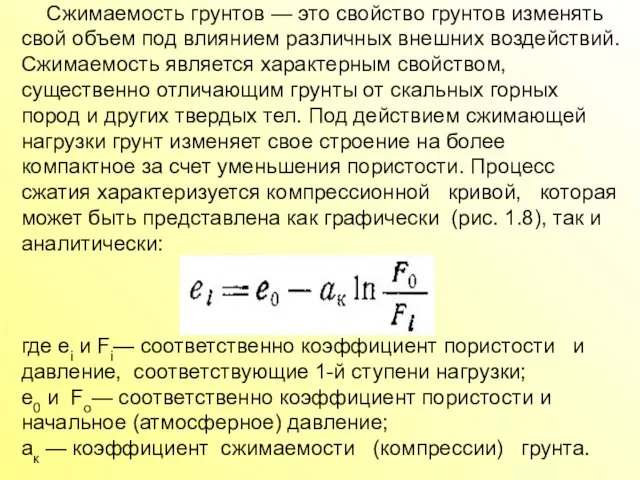
- 20. Сжимаемость грунтов — это свойство грунтов изменять свой объем под влиянием различных внешних воздействий. Сжимаемость является
- 21. Рис. 1.8. Компрессионная кривая
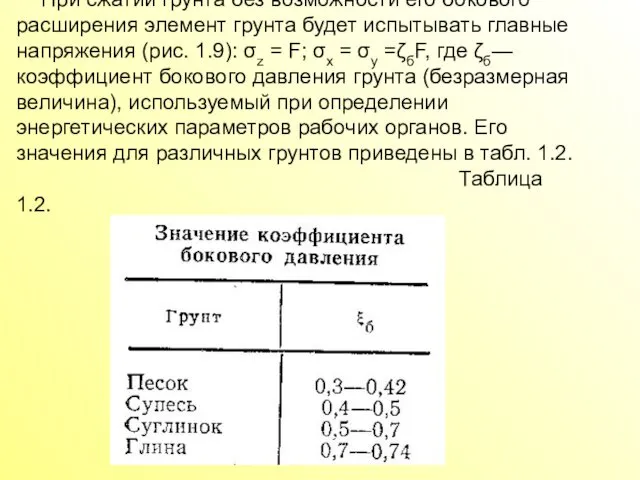
- 22. При сжатии грунта без возможности его бокового расширения элемент грунта будет испытывать главные напряжения (рис. 1.9):
- 23. Рис. 1.9. Напряжения, действующие на элемент грунта при его сжатии без бокового расширения
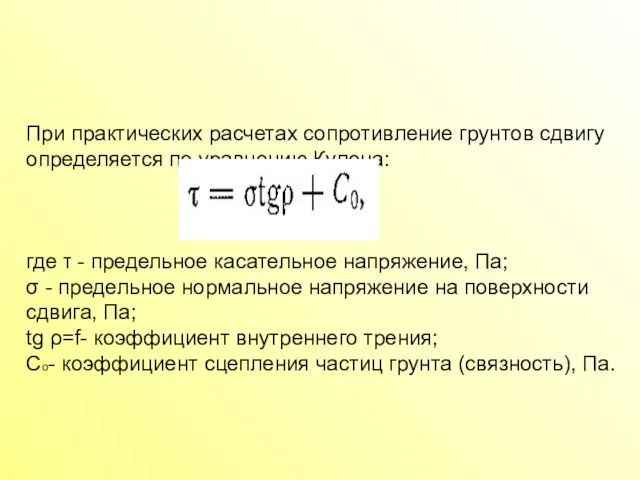
- 24. При практических расчетах сопротивление грунтов сдвигу определяется по уравнению Кулона: где τ - предельное касательное напряжение,
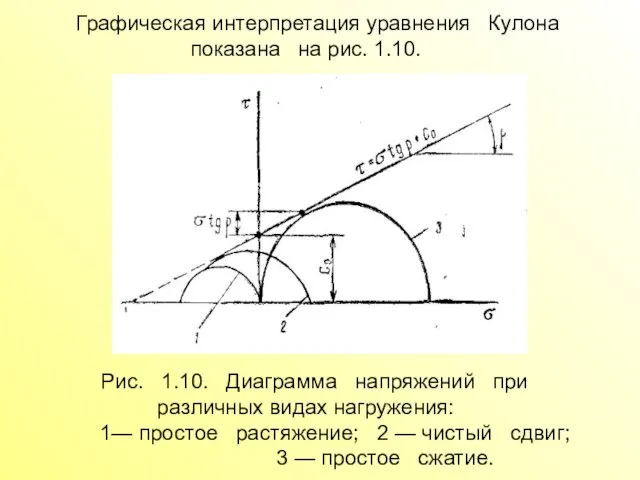
- 25. Графическая интерпретация уравнения Кулона показана на рис. 1.10. Рис. 1.10. Диаграмма напряжений при различных видах нагружения:
- 26. Абразивность — это свойство грунта подвергать износу рабочие органы и движители машин твердыми частицами (корундом, гранитом,
- 27. Таблица 1.3 Значение коэффициента формы штампа
- 28. Таблица 1.4 Зависимость напряжений для разрушения от температуры грунтов и видов разрушения
- 29. В табл. 1.4 приведены зависимости напряжений для разрушения мерзлого грунта от температуры t и вида разрушений.
- 30. Таблица 1.5 Значение показателя механических свойств грунтов
- 31. СПОСОБЫ РАЗРАБОТКИ ГРУНТОВ И ГОРНЫХ ПОРОД: - механический, - взрывной - гидравлический. - развиваються электрогидравлический и
- 32. При производстве инженерными подразделениями АСФ земляных и дорожных работ механический способ разработки грунтов и пород считается
- 33. Эффективность того или иного способа разработки грунта или породы оценивается прежде всего по величине удельной энергоемкости.
- 34. Рис. 1.11. Основные схемы разработки грунтов резанием: а — резание грунта по всей поверхности забоя; б
- 35. Рис. 1.12. Основные схемы разработки горных пород сколом: а — динамический скол; б — статический
- 36. 2. Классификация и общая характеристика рабочего оборудования спасательной техники.
- 37. Рис. 2.1. Рабочий инструмент основных землеройных машин
- 38. Рис. 2.2. Углы, определяющие положение рабочего инструмента
- 39. Рис. 2.3. Рабочие органы основных землеройных машин: а – бульдозерный (одноотзалышй); б — одноковшовый; в —
- 40. Рис. 2.4. Средства транспортировки грунта от рабочих органов землеройных машин на дневную поверхность: а и б
- 41. 3.Классификация и характеристика приводов машин для земляных работ, предъявляемые к ним требования. Ходовое оборудование машин для
- 42. Рис. 3.1. Схемы гусеничных движителей машин для земляных работ: а – БТМ-3; б – ИМР; в
- 43. Ходовая часть машин для земляных работ состоит из движителя и подвески. Движитель – это механизм, с
- 44. Рис. 3.2. Приспособление для самовытаскивания тягача: 1 - колодка с заделанными концами троса; 2 - трос;
- 45. Особенности устройства ходовой части изделий на базе МТ-Т Рис. 3.3. Ходовая часть изделия 453: 1- ведущее
- 46. Особенности устройства ходовой части трактора ДЭТ-250М Рис. 3.4. Подвеска трактора ДЭТ-250М: 1 - торсионный вал; 2
- 47. 4. Классификация экскаваторов и их рабочее оборудование.
- 48. Историческая справка
- 49. Рис. 4.1. Экскаватор М -1 -ДВ («Комсомолец») на базе трактора ХТЗ (1932 г.)
- 50. Рис. 4.2. Одноковшовый экскаватор Д - 0,35 (экспериментальный вариант) (1937 - 1939)
- 51. Рис. 4.3. Универсальный экскаватор Э - 302 (1957 г.) (модернизированный Э - 255)
- 52. Рис. 4.4. Войсковой одноковшовый экскаватор Э-305БВ (1959 г.)
- 53. Рис. 4.5. Войсковой гидравлический одноковшовый экскаватор ЭОВ – 4421 (1977 г.)
- 54. Экскаваторы одноковшовые войсковые Экскаватор одноковшовый войсковой ЭОВ-4521 ЭОВ-4421 ЭОВ-3521
- 55. Одноковшовый экскаватор - самоходная землеройная машина с основным рабочим органом в виде одного ковша, производящая разработку
- 56. По назначению одноковшовые экскаваторы бывают: - строительные и строительно-карьерные, имеющие обычно ковш вместимостью 0,015-10 м3 и
- 57. По типу привода различают экскаваторы с гидравлическим, механическим, гидромеханическим, электрическим и смешанным приводами. Название привода обычно
- 58. Обозначение экскаваторов ЭО-0000 Э - экскаватор; О - одноковшовый; В - войсковой. Первая порядковая цифра от
- 59. Таблица 5.1. Индексация экскаваторов
- 60. Таблица 5.2 Технические характеристики одноковшовых экскаваторов
- 62. Основные виды рабочего оборудования одноковшовых экскаваторов: Обратная лопата прямая лопата погрузочное оборудование грейфер драглайн оборудование для
- 63. Рис. 4.1. Принципиальная схема одноковшового экскаватора
- 64. Рис. 5.17. Одноковшовый гидравлический экскаватор с рабочим оборудованием прямая лопата
- 65. Рис. 5.18. Погрузочное оборудование экскаваторов (а) и схема его работы (б)
- 66. Рис. 4.10. Основные виды и исполнения рабочего оборудования 1-прямая лопата; 2- маятниковая прямая лопата; 3-напорная прямая
- 67. Рис. 4.6. Гусеничный полноповоротный экскаватор с гибкой подвеской и с оборудованием прямой лопатой
- 68. Рис. 5.7. Полноповоротный экскаватор с жесткой подвеской рабочего оборудования обратной лопаты на пневмоходу
- 69. Рис. 5.8. Неполноповоротный экскаватор с жесткой подвеской рабочего оборудования на базе колесного трактора
- 70. Рис. 5.9. Полноповоротный экскаватор с жесткой подвеской рабочего оборудования на базе автомобиля
- 71. Рис. 5.11. Неполноповоротный экскаватор с жесткой подвеской рабочего оборудования на базе колесного трактора
- 72. Основные сборочные единицы обратной лопаты - составная стрела, состоящая из основной и удлиняющей частей или неразъемная
- 73. Вместимость ковша, м3.........................................................0,65 Глубина копания котлованов (траншей), м: шириной до 2,5 м по дну........................................................3,25 шириной до
- 74. Рис. 5.13. Схемы работы одноковшового экскаватора рабочим оборудованием прямая (а) и обратная (б) лопата
- 75. Рис. 5.14. Рабочее оборудование обратной лопаты с составной стрелой и схемы расположения гидроцилиндров для привода стрелы
- 76. Рис. 5.15. Схемы составных стрел экскаваторов с невыдвижной (а), выдвижной (б) и поворотной (в) верхней их
- 77. Рис. 5.20. Схемы работы одноковшового экскаватора с землеройным рабочим оборудованием
- 78. Грейфер На экскаваторах с гидравлическим приводом устанавливают жестко подвешенные грейферы. Основное преимущество жестко подвешенного грейфера по
- 79. Рис. 5.19. Оборудование грейфера
- 80. Драглайн Предназначен для разработки грунтов, расположенных ниже уровня стояния экскаватора и применяется для экскаваторов с гибкой
- 81. Оборудование для рыхления грунтов Однозубый рыхлитель оборудование захватно-клещевого типа Гидромолот Экскаватор с рабочим оборудованием однозубого рыхлителя
- 82. Сменное рабочее оборудование захватно-клещевого типа предназначено для рыхления мерзлых грунтов, разборки старых зданий, взламывания и погрузки
- 83. Рис. 5.21. Рабочее оборудование рыхлителя
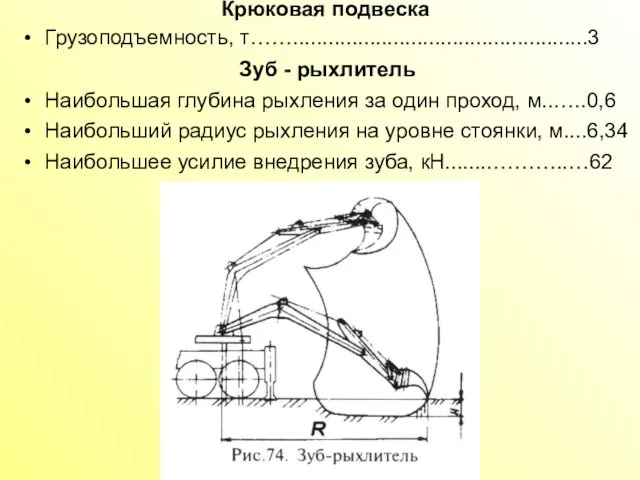
- 84. Крюковая подвеска Грузоподъемность, т……..................................................3 Зуб - рыхлитель Наибольшая глубина рыхления за один проход, м..…..0,6 Наибольший радиус
- 85. Рис. 5.22. Рабочее оборудование гидромолота
- 86. Гидромолот ГПМ - 300А Эффективная мощность, кВт.........................................................8,6 Энергия удара, кДж........................................................................2,94 Частота ударов, Гц..........................................................................3,2 Наибольший радиус рыхления
- 87. А, Б, В, Г - ковши обратной лопаты; Д - приспособление для захвата негабаритов; Е, Ж
- 88. Рис. 4.24. ЭОВ-4421
- 89. Рис. 4.25. Экскаватор ЭОВ-4421
- 90. Тактико-техническая характеристика экскаватора ЭОВ-4421 Техническая производительность в грунтах 1-й, 1-й категорий при отрывке: котлованов, м3/ч .
- 91. Рис. 5.26. Экскаватор Э-305
- 92. Рис. 5.27. Экскаватор Э-305
- 93. 5. Компоновка и общее устройство котлованных машин.
- 94. Войсковые котлованные машины предназначаются для отрывки котлованов под блиндажи, убежища и отрывки котлованных укрытий для боевых
- 95. Рис. 5.1. Отрывка котлована многопроходной котлованной машиной
- 96. Рис. 5.4. Котлованная машина МДК-2. Транспортное положение
- 97. Рис. 5.2. Схемы рабочих органов войсковых котлованных машин: а - фреза поперечного копания; б - фреза
- 98. Рис. 5.3. Компоновочные схемы войсковых котлованных машин: а, б — компоновки котлованных машин с движением гусениц
- 99. Рис 6.5. Схема быстроходной траншейной машины БТМ-3 в рабочем положении
- 101. Скачать презентацию
Характеристика грунтов и способы их разработки.
Классификация и общая характеристика рабочего
Характеристика грунтов и способы их разработки.
Классификация и общая характеристика рабочего
Литература:
Учебники "Машины инженерного вооружения", кн.1, 2, 4, Воениздат, М-86.
Васильченков В.Ф.,Военные
Литература:
Учебники "Машины инженерного вооружения", кн.1, 2, 4, Воениздат, М-86.
Васильченков В.Ф.,Военные
1. Характеристика грунтов и способы их разработки.
1. Характеристика грунтов и способы их разработки.

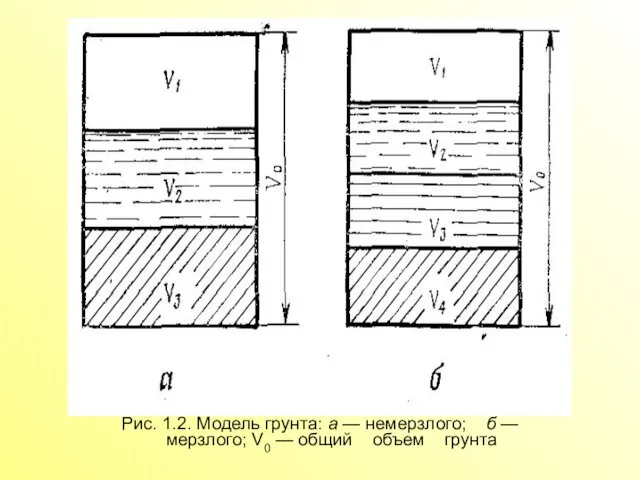
Рис. 1.2. Модель грунта: а — немерзлого; б — мерзлого; V0
Рис. 1.2. Модель грунта: а — немерзлого; б — мерзлого; V0
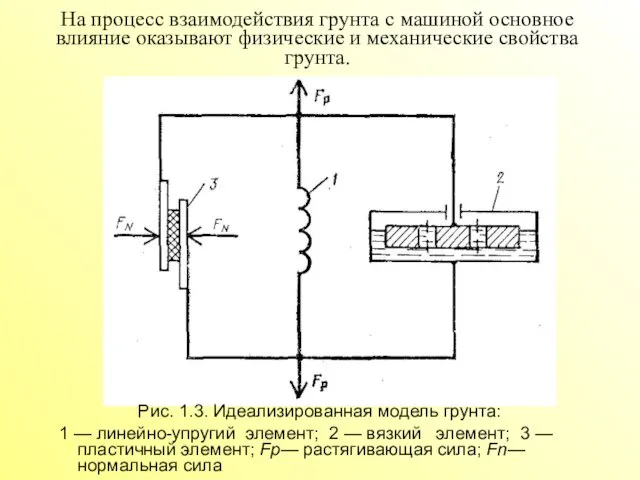
Рис. 1.3. Идеализированная модель грунта:
1 — линейно-упругий элемент; 2 — вязкий
Рис. 1.3. Идеализированная модель грунта:
1 — линейно-упругий элемент; 2 — вязкий
Под физическими свойствами подразумеваются те свойства, которые отражают физическое состояние грунта.
Под физическими свойствами подразумеваются те свойства, которые отражают физическое состояние грунта.
Плотность — это отношение массы грунта т при естественной влажности к
Плотность — это отношение массы грунта т при естественной влажности к
Влажность — это отношение массы воды, содержащейся в порах некоторого объема
Влажность — это отношение массы воды, содержащейся в порах некоторого объема
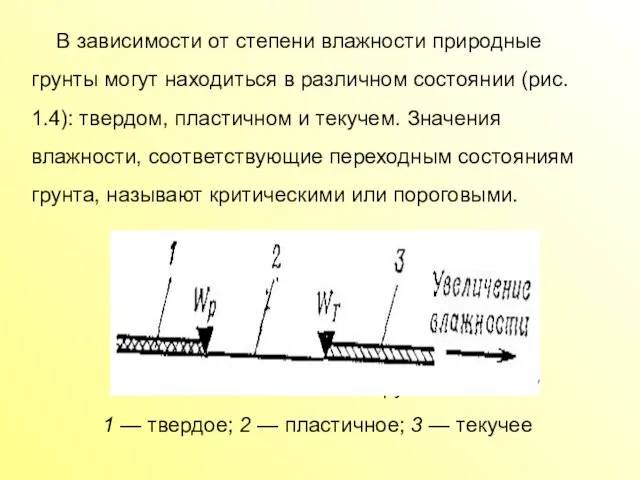
В зависимости от степени влажности природные грунты могут находиться в различном
В зависимости от степени влажности природные грунты могут находиться в различном
Пластичность — это способность грунта изменять свою форму без изменения объема.
Пластичность — это способность грунта изменять свою форму без изменения объема.
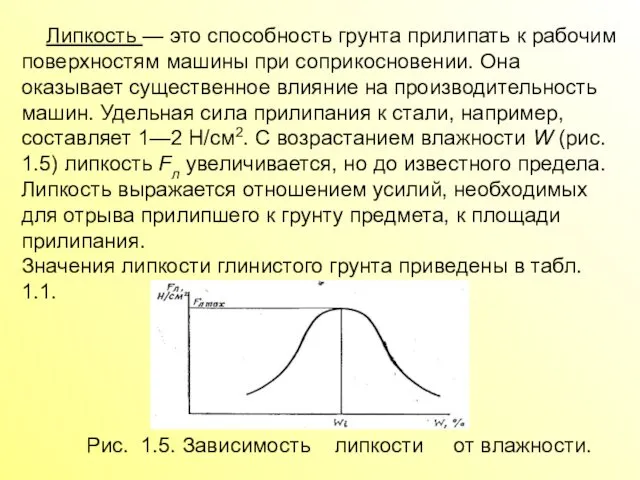
Липкость — это способность грунта прилипать к рабочим поверхностям машины при
Липкость — это способность грунта прилипать к рабочим поверхностям машины при
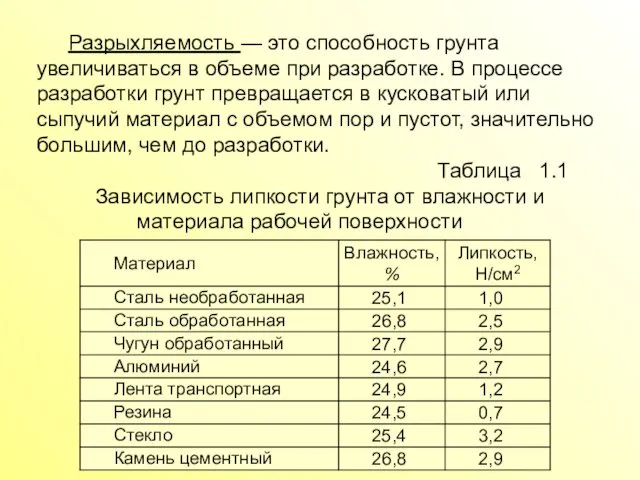
Разрыхляемость — это способность грунта увеличиваться в объеме при разработке. В
Разрыхляемость — это способность грунта увеличиваться в объеме при разработке. В
Пористость — это отношение объема пор (независимо от того, чем они
Пористость — это отношение объема пор (независимо от того, чем они
Примерзаемость — это способность грунта примерзать к частям рабочего органа при
Примерзаемость — это способность грунта примерзать к частям рабочего органа при
Связность. Частицы грунта находятся между собой в той или иной степени
Связность. Частицы грунта находятся между собой в той или иной степени
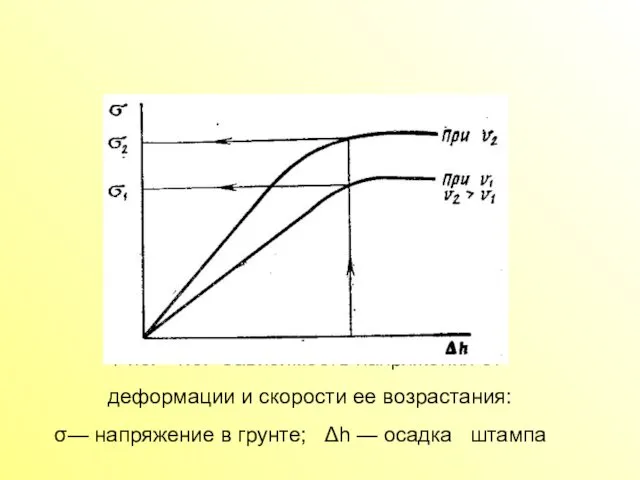
Рис. 1.6. Зависимость напряжения от
деформации и скорости ее возрастания:
σ—
Рис. 1.6. Зависимость напряжения от деформации и скорости ее возрастания: σ—
Приборы, основанные на принципе вдавливания штампов в грунт, называют плотномерами. Примером
Приборы, основанные на принципе вдавливания штампов в грунт, называют плотномерами. Примером
Сжимаемость грунтов — это свойство грунтов изменять свой объем под влиянием
Сжимаемость грунтов — это свойство грунтов изменять свой объем под влиянием
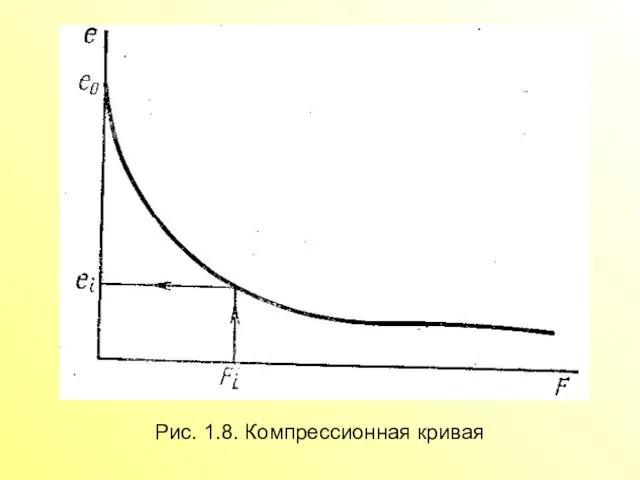
Рис. 1.8. Компрессионная кривая
Рис. 1.8. Компрессионная кривая
При сжатии грунта без возможности его бокового расширения элемент грунта будет
При сжатии грунта без возможности его бокового расширения элемент грунта будет
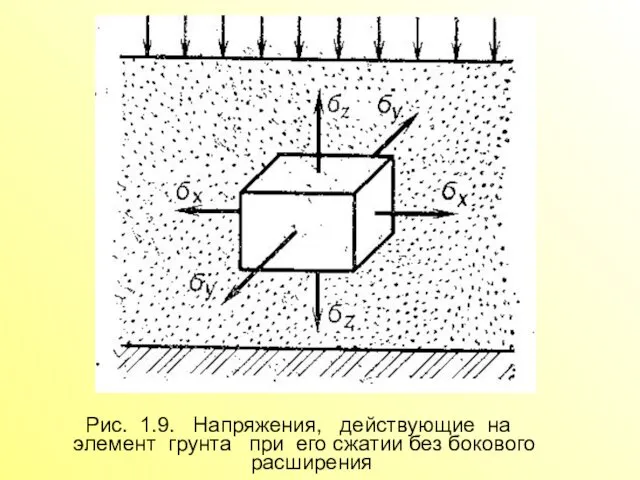
Рис. 1.9. Напряжения, действующие на
элемент грунта при его сжатии
Рис. 1.9. Напряжения, действующие на элемент грунта при его сжатии
При практических расчетах сопротивление грунтов сдвигу определяется по уравнению Кулона:
где τ
При практических расчетах сопротивление грунтов сдвигу определяется по уравнению Кулона: где τ
Графическая интерпретация уравнения Кулона показана на рис. 1.10.
Рис. 1.10.
Графическая интерпретация уравнения Кулона показана на рис. 1.10. Рис. 1.10.
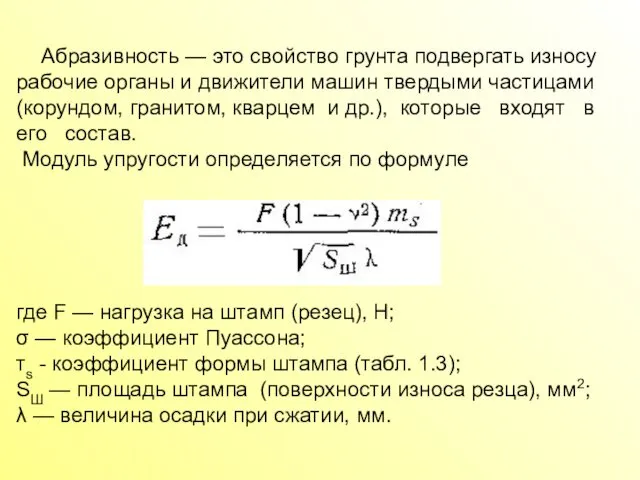
Абразивность — это свойство грунта подвергать износу рабочие органы и движители
Абразивность — это свойство грунта подвергать износу рабочие органы и движители
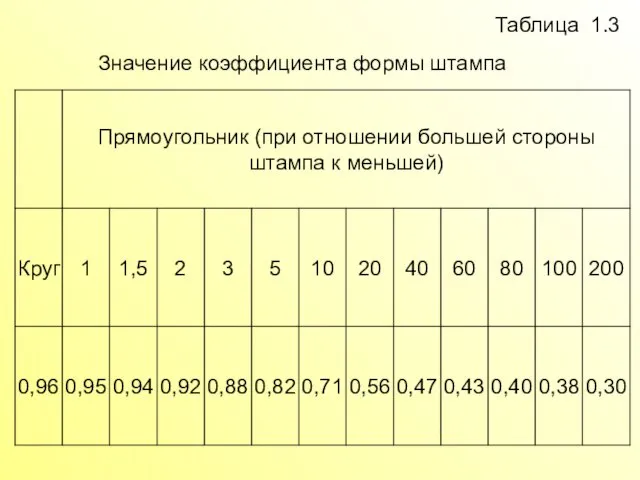
Таблица 1.3 Значение коэффициента формы штампа
Таблица 1.3 Значение коэффициента формы штампа
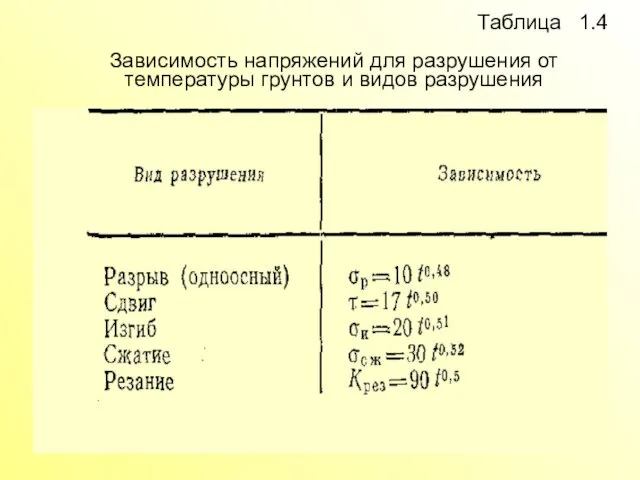
Таблица 1.4
Зависимость напряжений для разрушения от температуры грунтов и видов
Таблица 1.4 Зависимость напряжений для разрушения от температуры грунтов и видов
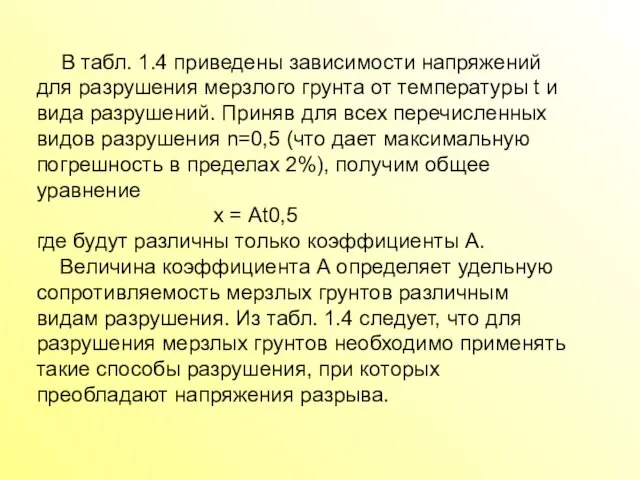
В табл. 1.4 приведены зависимости напряжений для разрушения мерзлого грунта от
В табл. 1.4 приведены зависимости напряжений для разрушения мерзлого грунта от
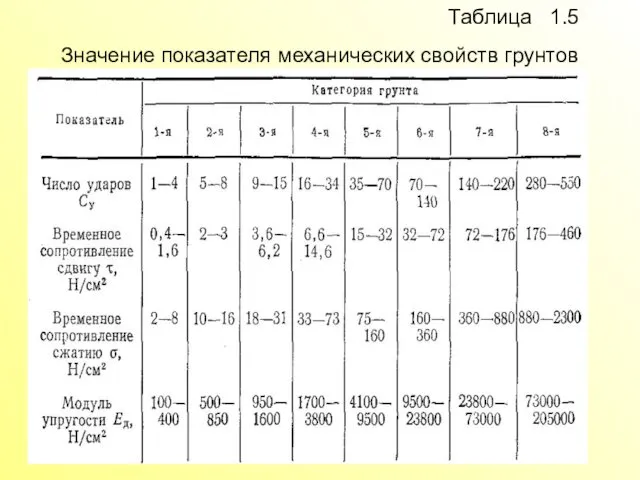
Таблица 1.5
Значение показателя механических свойств грунтов
Таблица 1.5
Значение показателя механических свойств грунтов
СПОСОБЫ РАЗРАБОТКИ ГРУНТОВ И ГОРНЫХ
ПОРОД:
- механический,
- взрывной
- гидравлический.
СПОСОБЫ РАЗРАБОТКИ ГРУНТОВ И ГОРНЫХ ПОРОД: - механический, - взрывной - гидравлический.
При производстве инженерными подразделениями АСФ земляных и дорожных работ механический способ
При производстве инженерными подразделениями АСФ земляных и дорожных работ механический способ
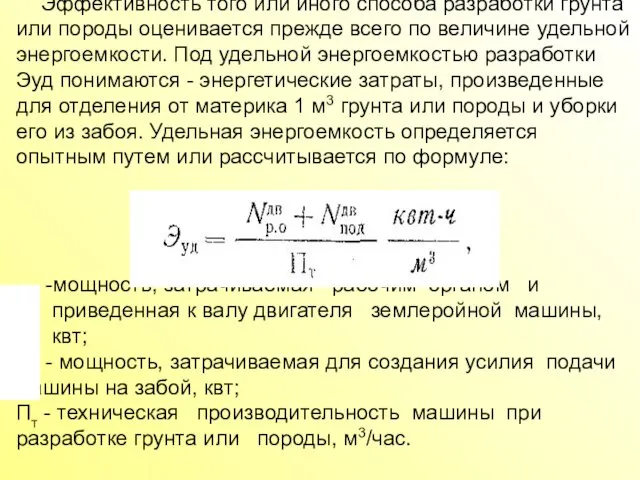
Эффективность того или иного способа разработки грунта или породы оценивается прежде
Эффективность того или иного способа разработки грунта или породы оценивается прежде
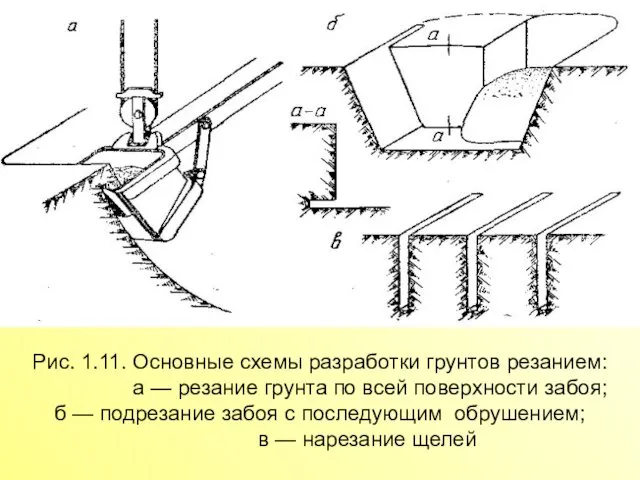
Рис. 1.11. Основные схемы разработки грунтов резанием:
а — резание грунта
Рис. 1.11. Основные схемы разработки грунтов резанием: а — резание грунта
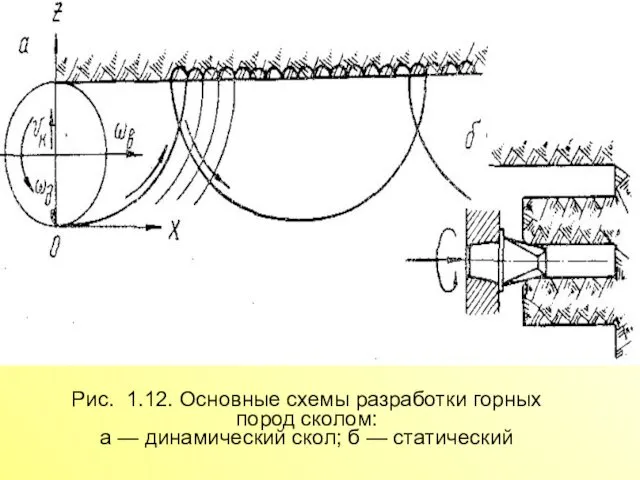
Рис. 1.12. Основные схемы разработки горных пород сколом:
а — динамический скол;
Рис. 1.12. Основные схемы разработки горных пород сколом: а — динамический скол;
2. Классификация и общая характеристика рабочего оборудования спасательной техники.
2. Классификация и общая характеристика рабочего оборудования спасательной техники.
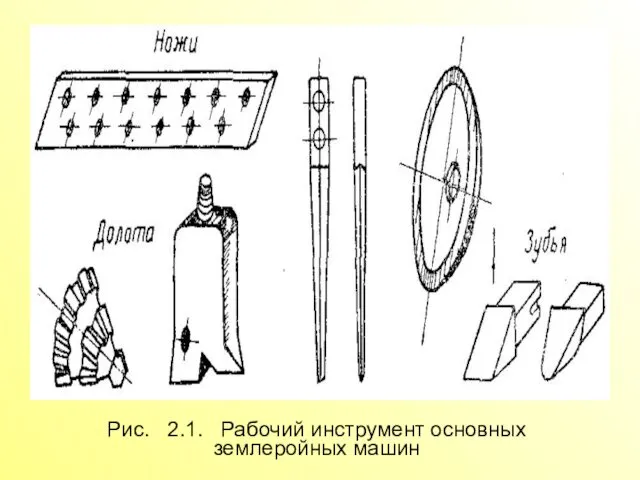
Рис. 2.1. Рабочий инструмент основных землеройных машин
Рис. 2.1. Рабочий инструмент основных землеройных машин
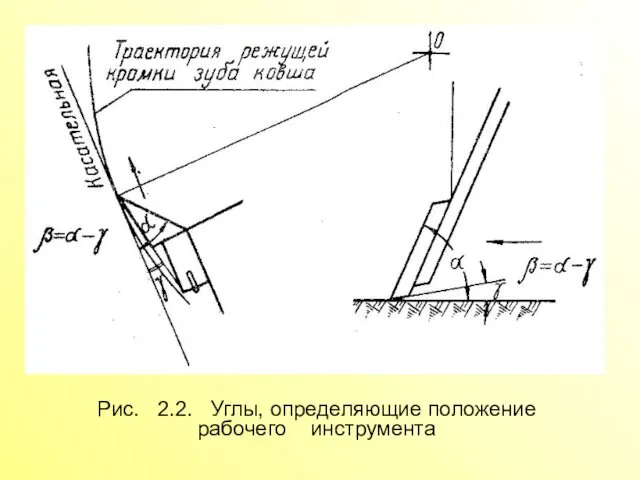
Рис. 2.2. Углы, определяющие положение рабочего инструмента
Рис. 2.2. Углы, определяющие положение рабочего инструмента

Рис. 2.3. Рабочие органы основных землеройных машин:
а – бульдозерный (одноотзалышй);
Рис. 2.3. Рабочие органы основных землеройных машин: а – бульдозерный (одноотзалышй);
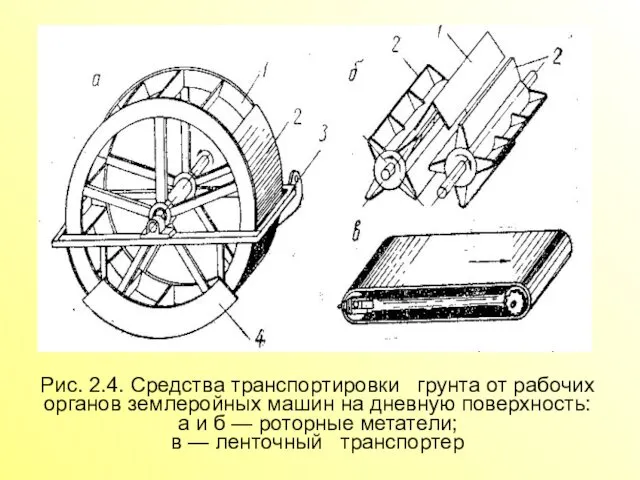
Рис. 2.4. Средства транспортировки грунта от рабочих
органов землеройных машин на дневную
Рис. 2.4. Средства транспортировки грунта от рабочих органов землеройных машин на дневную
3.Классификация и характеристика приводов машин для земляных работ, предъявляемые к ним
3.Классификация и характеристика приводов машин для земляных работ, предъявляемые к ним
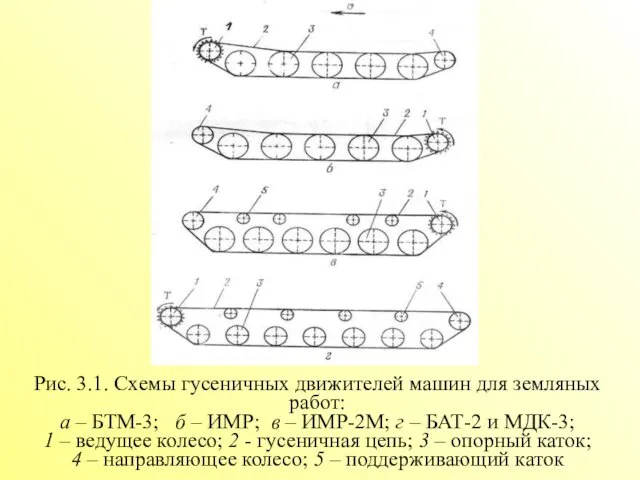
Рис. 3.1. Схемы гусеничных движителей машин для земляных работ:
а – БТМ-3;
Рис. 3.1. Схемы гусеничных движителей машин для земляных работ: а – БТМ-3;
Ходовая часть машин для земляных работ состоит из движителя и подвески.
Ходовая часть машин для земляных работ состоит из движителя и подвески.

Рис. 3.2. Приспособление для самовытаскивания тягача:
1 - колодка с заделанными концами
Рис. 3.2. Приспособление для самовытаскивания тягача:
1 - колодка с заделанными концами
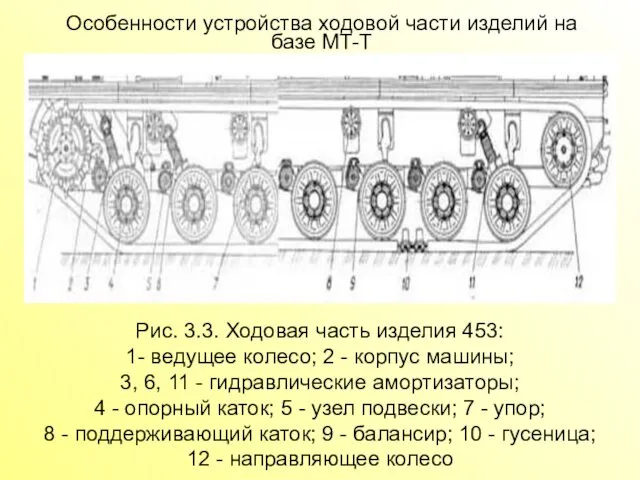
Особенности устройства ходовой части изделий на базе МТ-Т
Рис. 3.3. Ходовая часть
Особенности устройства ходовой части изделий на базе МТ-Т
Рис. 3.3. Ходовая часть

Особенности устройства ходовой части трактора ДЭТ-250М
Рис. 3.4. Подвеска трактора ДЭТ-250М:
1 -
Особенности устройства ходовой части трактора ДЭТ-250М
Рис. 3.4. Подвеска трактора ДЭТ-250М:
1 -
4. Классификация экскаваторов и их рабочее оборудование.
4. Классификация экскаваторов и их рабочее оборудование.
Историческая справка
Историческая справка
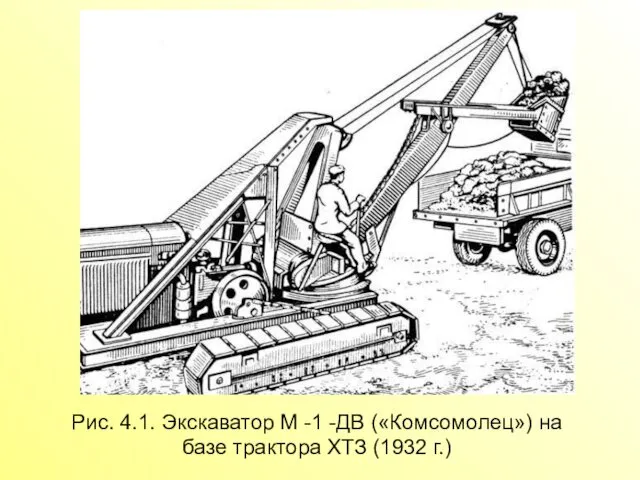
Рис. 4.1. Экскаватор М -1 -ДВ («Комсомолец») на базе трактора ХТЗ
Рис. 4.1. Экскаватор М -1 -ДВ («Комсомолец») на базе трактора ХТЗ
Рис. 4.2. Одноковшовый экскаватор Д - 0,35 (экспериментальный вариант) (1937 -
Рис. 4.2. Одноковшовый экскаватор Д - 0,35 (экспериментальный вариант) (1937 -

Рис. 4.3. Универсальный экскаватор Э - 302 (1957 г.)
(модернизированный Э -
Рис. 4.3. Универсальный экскаватор Э - 302 (1957 г.) (модернизированный Э -

Рис. 4.4. Войсковой одноковшовый экскаватор
Э-305БВ (1959 г.)
Рис. 4.4. Войсковой одноковшовый экскаватор
Э-305БВ (1959 г.)

Рис. 4.5. Войсковой гидравлический одноковшовый экскаватор ЭОВ – 4421 (1977 г.)
Рис. 4.5. Войсковой гидравлический одноковшовый экскаватор ЭОВ – 4421 (1977 г.)

Экскаваторы одноковшовые войсковые
Экскаватор одноковшовый войсковой ЭОВ-4521
ЭОВ-4421
ЭОВ-3521
Экскаваторы одноковшовые войсковые
Экскаватор одноковшовый войсковой ЭОВ-4521
ЭОВ-4421
ЭОВ-3521
Одноковшовый экскаватор - самоходная землеройная машина с основным рабочим органом
Одноковшовый экскаватор - самоходная землеройная машина с основным рабочим органом
По назначению одноковшовые экскаваторы бывают:
- строительные и строительно-карьерные, имеющие обычно
По назначению одноковшовые экскаваторы бывают: - строительные и строительно-карьерные, имеющие обычно
По типу привода различают экскаваторы с гидравлическим, механическим, гидромеханическим, электрическим
По типу привода различают экскаваторы с гидравлическим, механическим, гидромеханическим, электрическим
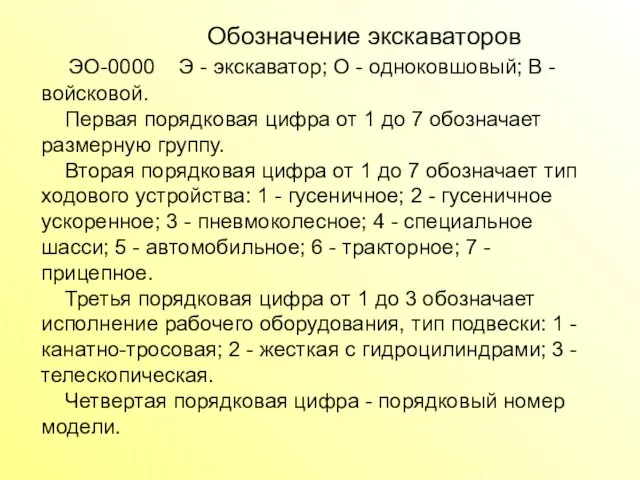
Обозначение экскаваторов
ЭО-0000 Э - экскаватор; О - одноковшовый; В
Обозначение экскаваторов ЭО-0000 Э - экскаватор; О - одноковшовый; В
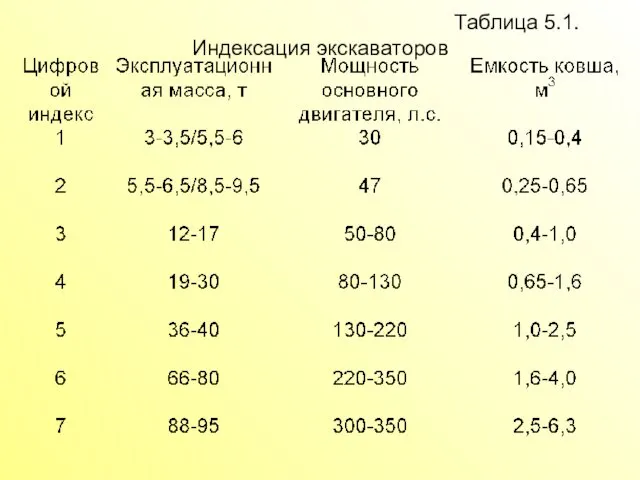
Таблица 5.1.
Индексация экскаваторов
Таблица 5.1.
Индексация экскаваторов
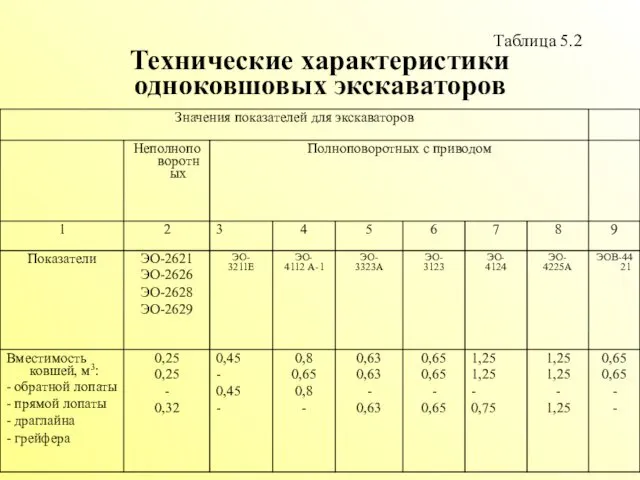
Таблица 5.2
Технические характеристики одноковшовых экскаваторов
Таблица 5.2
Технические характеристики одноковшовых экскаваторов

Основные виды рабочего оборудования одноковшовых экскаваторов:
Обратная лопата
прямая лопата
погрузочное оборудование
грейфер
драглайн
оборудование для рыхления
Основные виды рабочего оборудования одноковшовых экскаваторов:
Обратная лопата
прямая лопата
погрузочное оборудование
грейфер
драглайн
оборудование для рыхления
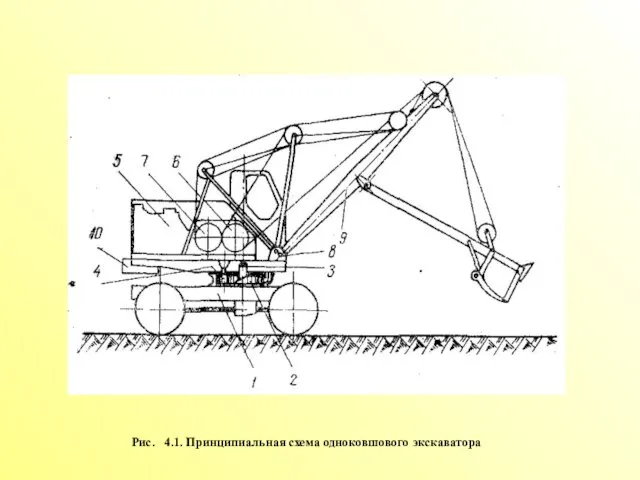
Рис. 4.1. Принципиальная схема одноковшового экскаватора
Рис. 4.1. Принципиальная схема одноковшового экскаватора

Рис. 5.17. Одноковшовый гидравлический экскаватор с рабочим оборудованием прямая лопата
Рис. 5.17. Одноковшовый гидравлический экскаватор с рабочим оборудованием прямая лопата
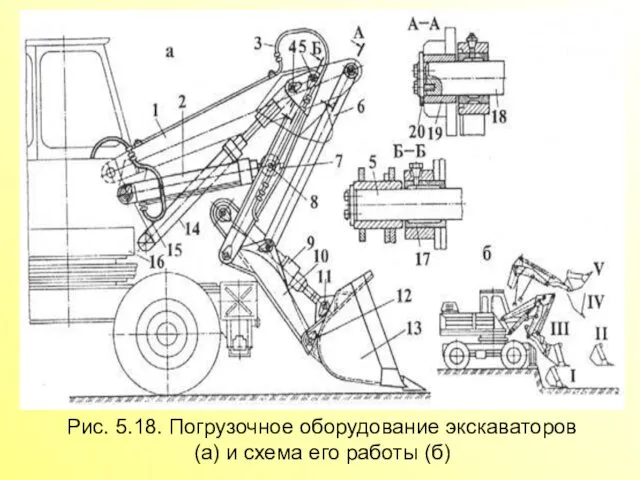
Рис. 5.18. Погрузочное оборудование экскаваторов (а) и схема его работы (б)
Рис. 5.18. Погрузочное оборудование экскаваторов (а) и схема его работы (б)
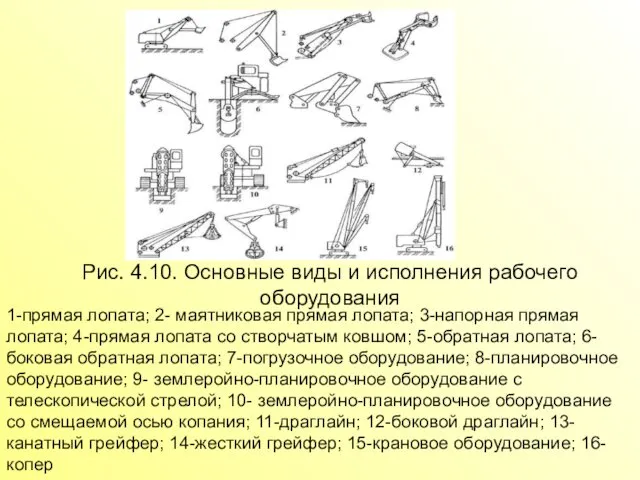
Рис. 4.10. Основные виды и исполнения рабочего оборудования
1-прямая лопата; 2- маятниковая
Рис. 4.10. Основные виды и исполнения рабочего оборудования
1-прямая лопата; 2- маятниковая

Рис. 4.6. Гусеничный полноповоротный экскаватор с гибкой подвеской и с оборудованием
Рис. 4.6. Гусеничный полноповоротный экскаватор с гибкой подвеской и с оборудованием
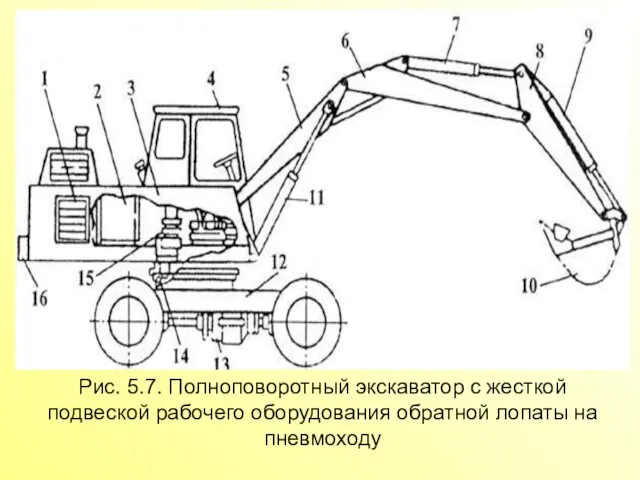
Рис. 5.7. Полноповоротный экскаватор с жесткой подвеской рабочего оборудования обратной лопаты
Рис. 5.7. Полноповоротный экскаватор с жесткой подвеской рабочего оборудования обратной лопаты

Рис. 5.8. Неполноповоротный экскаватор с жесткой подвеской рабочего оборудования на базе
Рис. 5.8. Неполноповоротный экскаватор с жесткой подвеской рабочего оборудования на базе
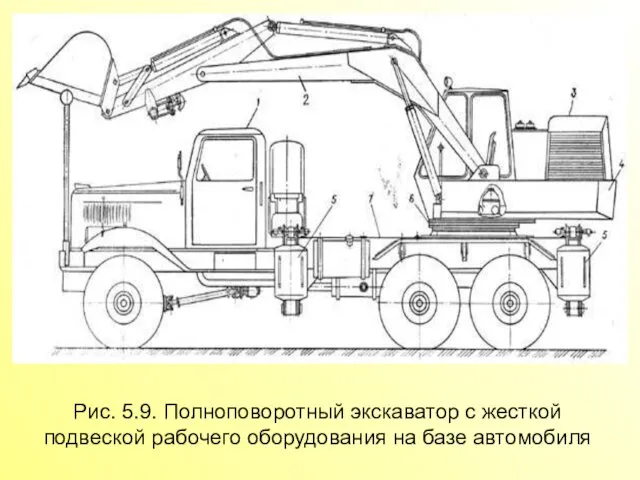
Рис. 5.9. Полноповоротный экскаватор с жесткой подвеской рабочего оборудования на базе
Рис. 5.9. Полноповоротный экскаватор с жесткой подвеской рабочего оборудования на базе

Рис. 5.11. Неполноповоротный экскаватор с жесткой подвеской рабочего оборудования на базе
Рис. 5.11. Неполноповоротный экскаватор с жесткой подвеской рабочего оборудования на базе
Основные сборочные единицы обратной лопаты
- составная стрела, состоящая из основной и
Основные сборочные единицы обратной лопаты
- составная стрела, состоящая из основной и
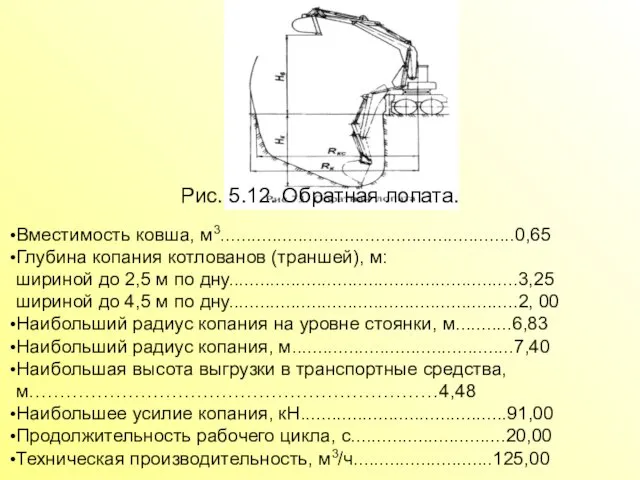
Вместимость ковша, м3.........................................................0,65
Глубина копания котлованов (траншей), м:
шириной до 2,5 м
Вместимость ковша, м3.........................................................0,65
Глубина копания котлованов (траншей), м:
шириной до 2,5 м
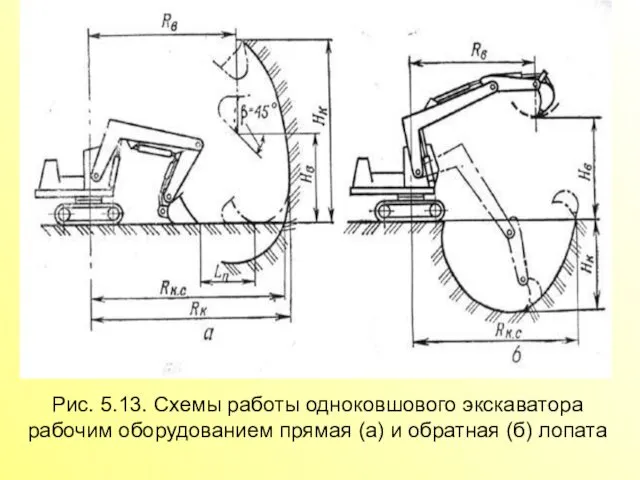
Рис. 5.13. Схемы работы одноковшового экскаватора рабочим оборудованием прямая (а) и
Рис. 5.13. Схемы работы одноковшового экскаватора рабочим оборудованием прямая (а) и
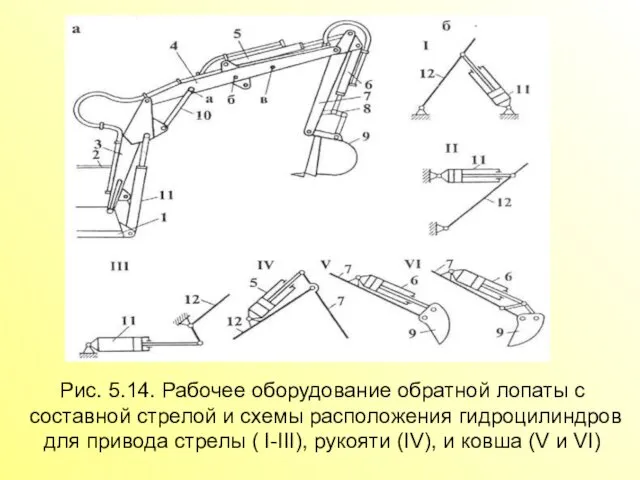
Рис. 5.14. Рабочее оборудование обратной лопаты с составной стрелой и схемы
Рис. 5.14. Рабочее оборудование обратной лопаты с составной стрелой и схемы
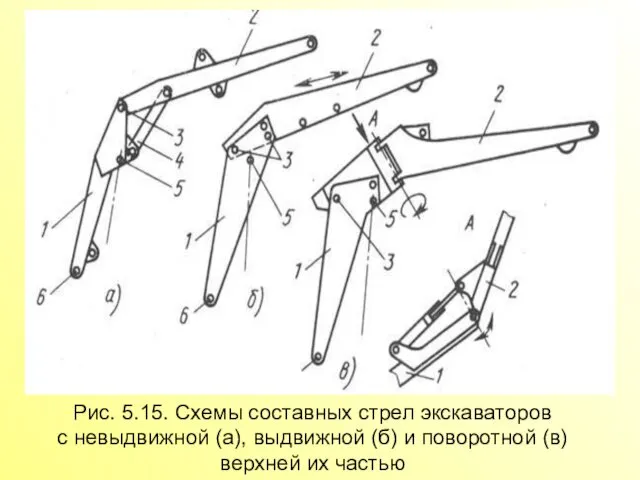
Рис. 5.15. Схемы составных стрел экскаваторов
с невыдвижной (а), выдвижной (б) и
Рис. 5.15. Схемы составных стрел экскаваторов с невыдвижной (а), выдвижной (б) и

Рис. 5.20. Схемы работы одноковшового экскаватора с землеройным рабочим оборудованием
Рис. 5.20. Схемы работы одноковшового экскаватора с землеройным рабочим оборудованием
Грейфер
На экскаваторах с гидравлическим приводом устанавливают жестко подвешенные грейферы. Основное
Грейфер
На экскаваторах с гидравлическим приводом устанавливают жестко подвешенные грейферы. Основное

Рис. 5.19. Оборудование грейфера
Рис. 5.19. Оборудование грейфера
Драглайн
Предназначен для разработки грунтов, расположенных ниже уровня стояния экскаватора и
Драглайн
Предназначен для разработки грунтов, расположенных ниже уровня стояния экскаватора и
Оборудование для рыхления грунтов
Однозубый рыхлитель
оборудование захватно-клещевого типа
Гидромолот
Экскаватор с рабочим оборудованием
Оборудование для рыхления грунтов
Однозубый рыхлитель
оборудование захватно-клещевого типа
Гидромолот
Экскаватор с рабочим оборудованием
Сменное рабочее оборудование захватно-клещевого типа предназначено для рыхления мерзлых грунтов, разборки
Сменное рабочее оборудование захватно-клещевого типа предназначено для рыхления мерзлых грунтов, разборки
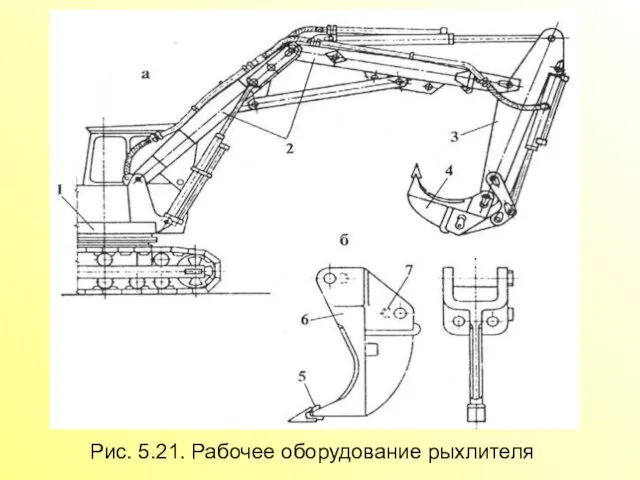
Рис. 5.21. Рабочее оборудование рыхлителя
Рис. 5.21. Рабочее оборудование рыхлителя
Крюковая подвеска
Грузоподъемность, т……..................................................3
Зуб - рыхлитель
Наибольшая глубина рыхления за один проход, м..…..0,6
Наибольший
Крюковая подвеска
Грузоподъемность, т……..................................................3
Зуб - рыхлитель
Наибольшая глубина рыхления за один проход, м..…..0,6
Наибольший
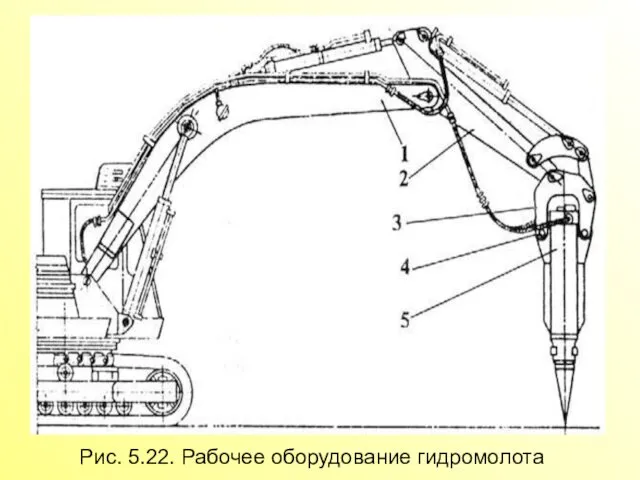
Рис. 5.22. Рабочее оборудование гидромолота
Рис. 5.22. Рабочее оборудование гидромолота
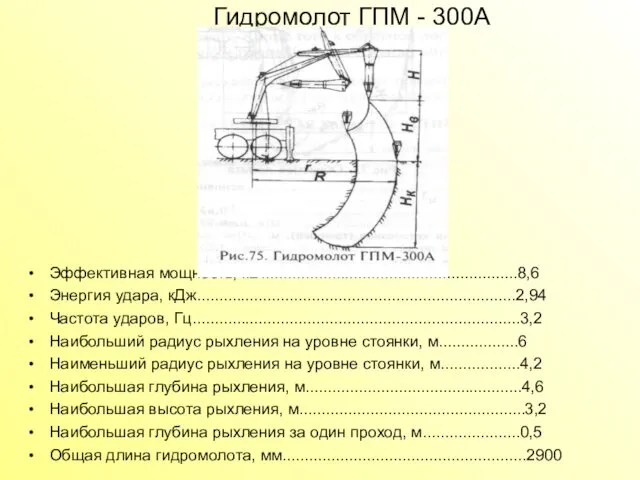
Гидромолот ГПМ - 300А
Эффективная мощность, кВт.........................................................8,6
Энергия удара, кДж........................................................................2,94
Частота ударов, Гц..........................................................................3,2
Наибольший радиус
Гидромолот ГПМ - 300А
Эффективная мощность, кВт.........................................................8,6
Энергия удара, кДж........................................................................2,94
Частота ударов, Гц..........................................................................3,2
Наибольший радиус
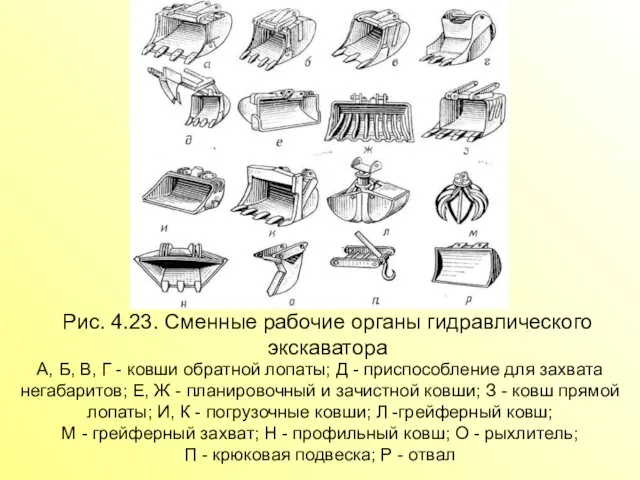
А, Б, В, Г - ковши обратной лопаты; Д - приспособление
А, Б, В, Г - ковши обратной лопаты; Д - приспособление

Рис. 4.24. ЭОВ-4421
Рис. 4.24. ЭОВ-4421
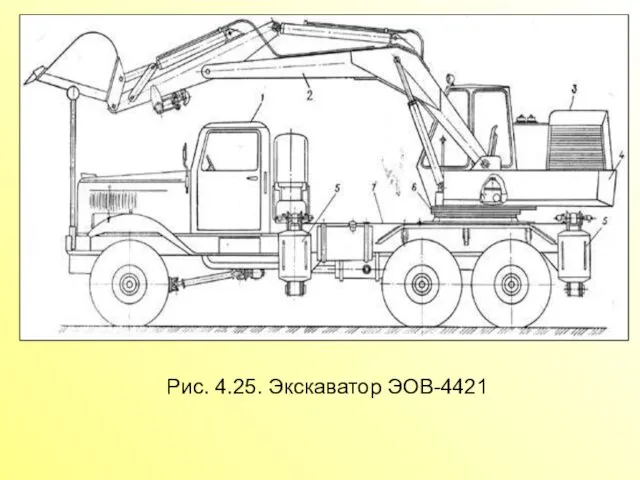
Рис. 4.25. Экскаватор ЭОВ-4421
Рис. 4.25. Экскаватор ЭОВ-4421
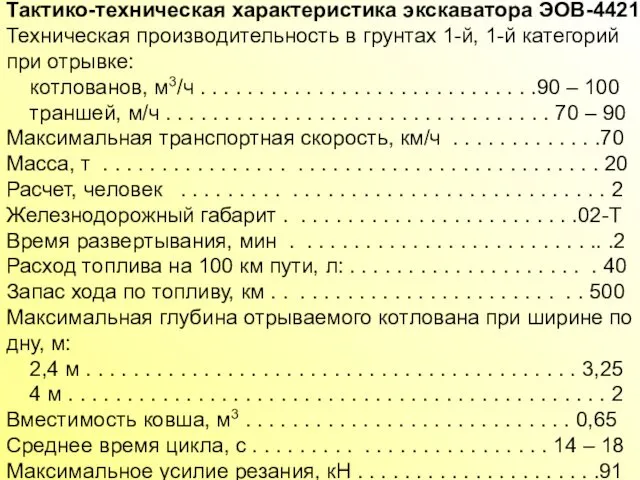
Тактико-техническая характеристика экскаватора ЭОВ-4421
Техническая производительность в грунтах 1-й, 1-й категорий при
Тактико-техническая характеристика экскаватора ЭОВ-4421 Техническая производительность в грунтах 1-й, 1-й категорий при

Рис. 5.26. Экскаватор Э-305
Рис. 5.26. Экскаватор Э-305

Рис. 5.27. Экскаватор Э-305
Рис. 5.27. Экскаватор Э-305
5. Компоновка и общее устройство котлованных машин.
5. Компоновка и общее устройство котлованных машин.
Войсковые котлованные машины предназначаются для отрывки котлованов под блиндажи, убежища
Войсковые котлованные машины предназначаются для отрывки котлованов под блиндажи, убежища

Рис. 5.1. Отрывка котлована многопроходной котлованной машиной
Рис. 5.1. Отрывка котлована многопроходной котлованной машиной

Рис. 5.4. Котлованная машина МДК-2. Транспортное положение
Рис. 5.4. Котлованная машина МДК-2. Транспортное положение

Рис. 5.2. Схемы рабочих органов войсковых котлованных машин:
а - фреза поперечного
Рис. 5.2. Схемы рабочих органов войсковых котлованных машин: а - фреза поперечного
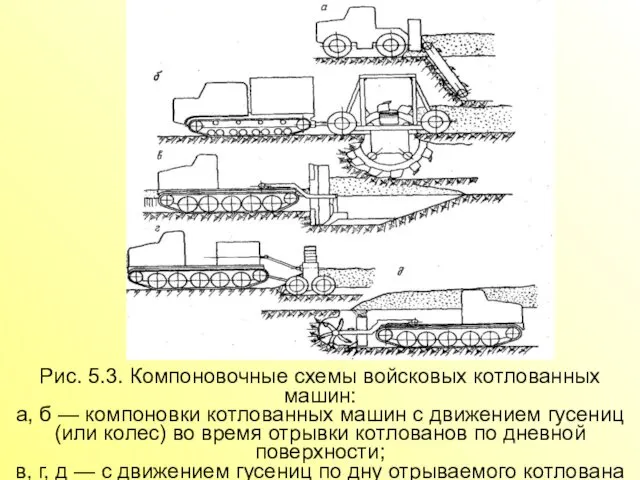
Рис. 5.3. Компоновочные схемы войсковых котлованных машин:
а, б — компоновки
Рис. 5.3. Компоновочные схемы войсковых котлованных машин: а, б — компоновки

Рис 6.5. Схема быстроходной траншейной машины БТМ-3 в рабочем положении
Рис 6.5. Схема быстроходной траншейной машины БТМ-3 в рабочем положении
 Игра-викторина Снежные загадки
Игра-викторина Снежные загадки Упаковка для мелочей
Упаковка для мелочей Dance
Dance Технологии агропромышленного комплекса
Технологии агропромышленного комплекса Деловая игра
Деловая игра Хлопчатобумажные ткани: производство, ассортимент, свойства
Хлопчатобумажные ткани: производство, ассортимент, свойства Внутренние опоры и элементы каркаса. Железобетонные колонны
Внутренние опоры и элементы каркаса. Железобетонные колонны 20170117_gretsiya_i_kriti_v_epohu_bronzy
20170117_gretsiya_i_kriti_v_epohu_bronzy The UK the USA
The UK the USA Миссионерские путешествия Святого апостола Павла, по книге деяний. Священное писание Нового Завета
Миссионерские путешествия Святого апостола Павла, по книге деяний. Священное писание Нового Завета Афганистан болит в моей душе
Афганистан болит в моей душе Отчёт-портфолио Мои успехи в освоении технологии за 6 класс
Отчёт-портфолио Мои успехи в освоении технологии за 6 класс Дети –герои ВОВ
Дети –герои ВОВ Sterilised Cat_april_02nd'18
Sterilised Cat_april_02nd'18 Futur simple. Французкий язык
Futur simple. Французкий язык Классификация строительных материалов
Классификация строительных материалов Культура и религия
Культура и религия Представители параллельных систем
Представители параллельных систем Пасхальная открытка
Пасхальная открытка Газгольдеры
Газгольдеры 20180910_kopiya_moy_praded
20180910_kopiya_moy_praded Художники Вятки
Художники Вятки Vasilyeva_L_Industrialny_proryv_pervykh_pyatiletok_Metallurgia
Vasilyeva_L_Industrialny_proryv_pervykh_pyatiletok_Metallurgia Жанры тележурналистики
Жанры тележурналистики Красоту нужно уметь замечать
Красоту нужно уметь замечать Страна LEGO
Страна LEGO Сырьё для производства цемента и строительной извести
Сырьё для производства цемента и строительной извести 20150501_prezentatsiya_microsoft_office_powerpoint.ppt_1
20150501_prezentatsiya_microsoft_office_powerpoint.ppt_1