- Автомобильные дороги и городские улицы 4

Содержание
- 2. Проектирование автомобильных дорог Категория дороги назначается по СНиП в зависимости от перспективной (на 20 лет) расчетной
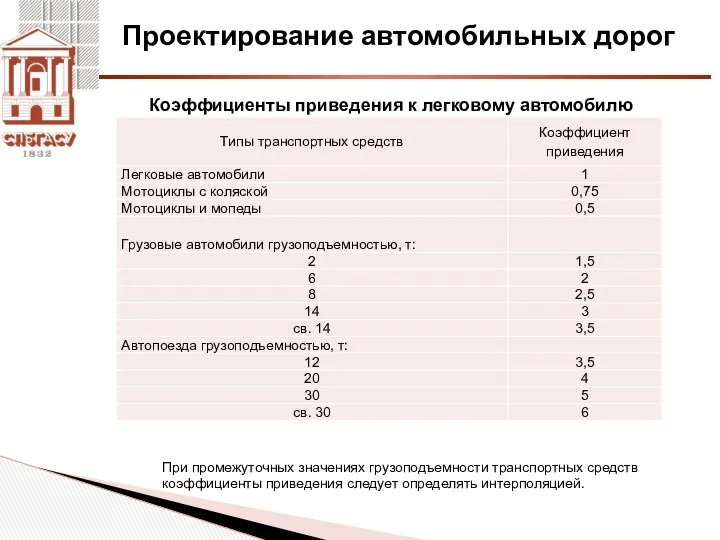
- 3. Проектирование автомобильных дорог Коэффициенты приведения к легковому автомобилю При промежуточных значениях грузоподъемности транспортных средств коэффициенты приведения
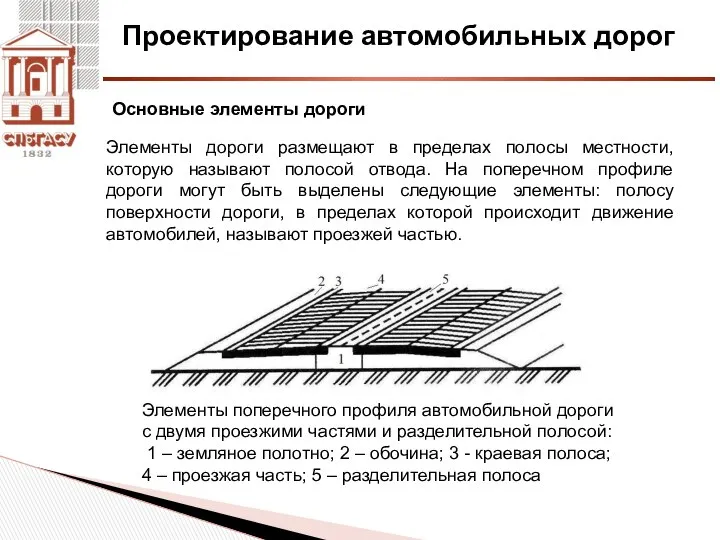
- 4. Проектирование автомобильных дорог Основные элементы дороги Элементы дороги размещают в пределах полосы местности, которую называют полосой
- 5. Проектирование автомобильных дорог Дорогу в плане и продольном профиле надлежит проектировать из условия наименьшего ограничения и
- 6. Проектирование автомобильных дорог Требования, предъявляемые автомобилем к дороге Наиболее важные факторы, влияющие на режим движения автомобиля:
- 7. Проектирование автомобильных дорог Требования, предъявляемые автомобилем к дороге Автомобилем к дороге предъявляются следующие требования: обеспечение возможности
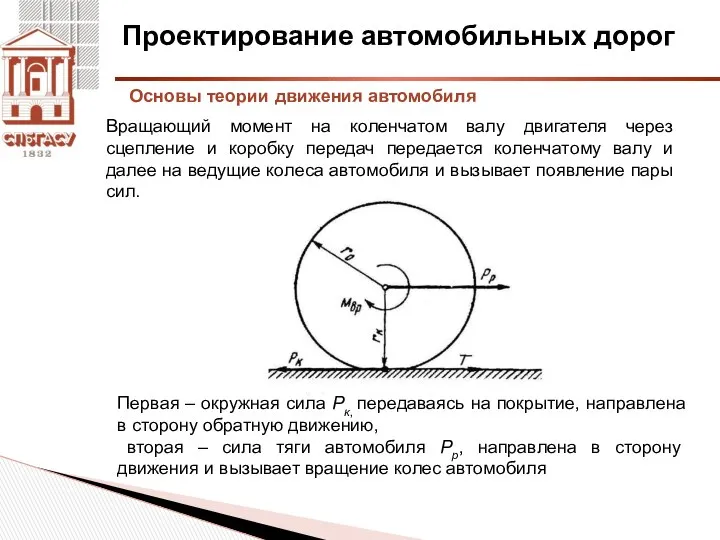
- 8. Проектирование автомобильных дорог Основы теории движения автомобиля Вращающий момент на коленчатом валу двигателя через сцепление и
- 9. Проектирование автомобильных дорог Основы теории движения автомобиля Окружная сила Рк, передаваясь на покрытие, направлена в сторону
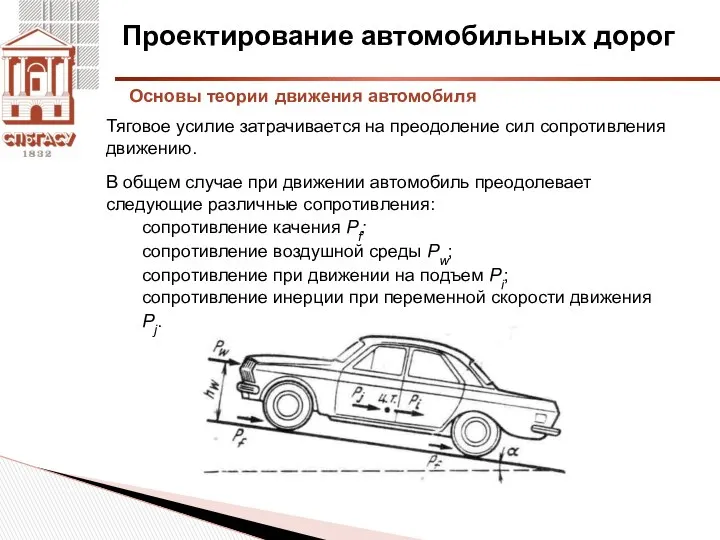
- 10. Проектирование автомобильных дорог Основы теории движения автомобиля Тяговое усилие затрачивается на преодоление сил сопротивления движению. В
- 11. Проектирование автомобильных дорог Сопротивление качению Pf вызывается затратой мощности двигателя на деформацию покрытия и шины, на
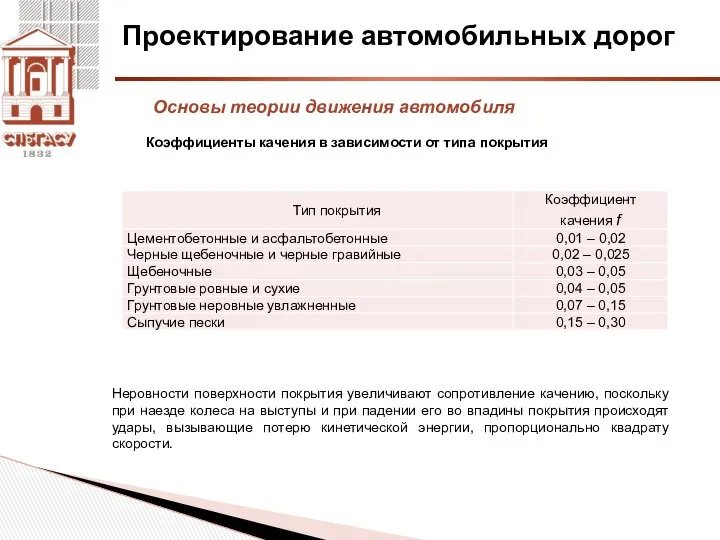
- 12. Проектирование автомобильных дорог Основы теории движения автомобиля Коэффициенты качения в зависимости от типа покрытия Неровности поверхности
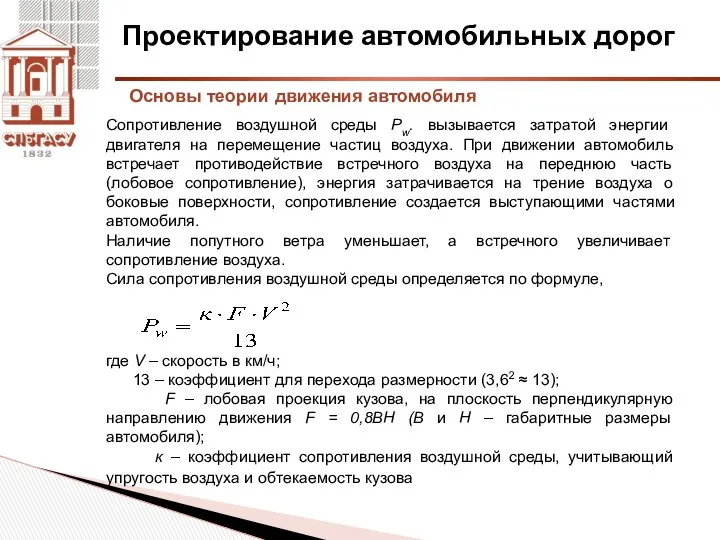
- 13. Проектирование автомобильных дорог Основы теории движения автомобиля Сопротивление воздушной среды Pw. вызывается затратой энергии двигателя на
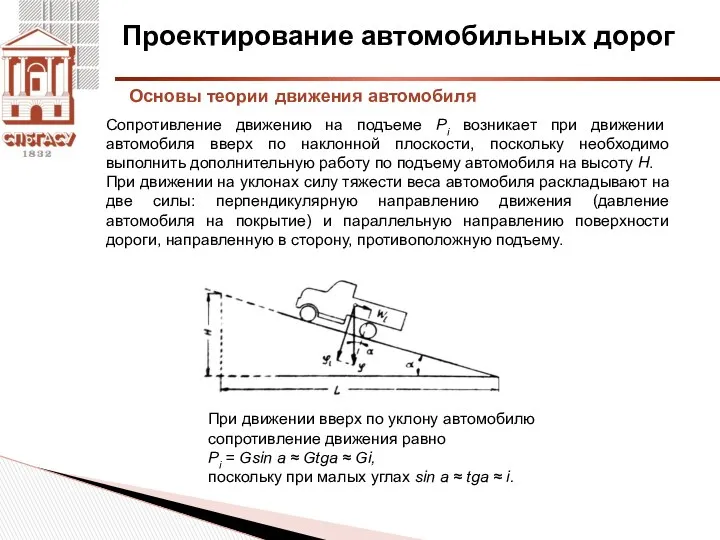
- 14. Проектирование автомобильных дорог Сопротивление движению на подъеме Pi возникает при движении автомобиля вверх по наклонной плоскости,
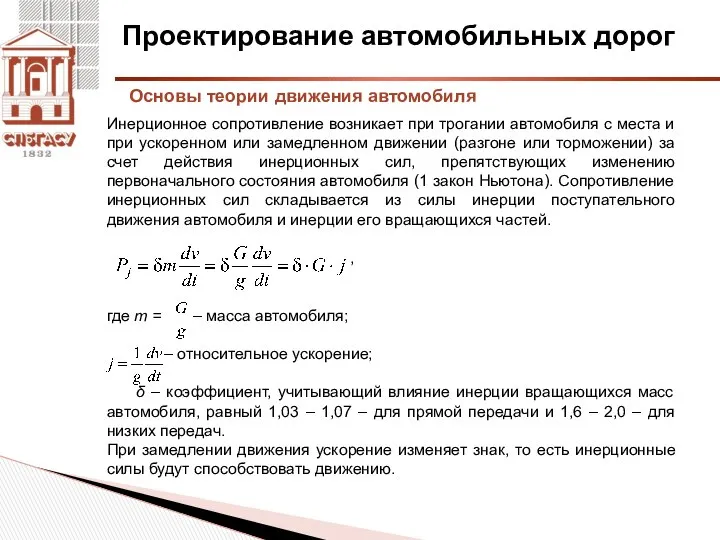
- 15. Проектирование автомобильных дорог Инерционное сопротивление возникает при трогании автомобиля с места и при ускоренном или замедленном
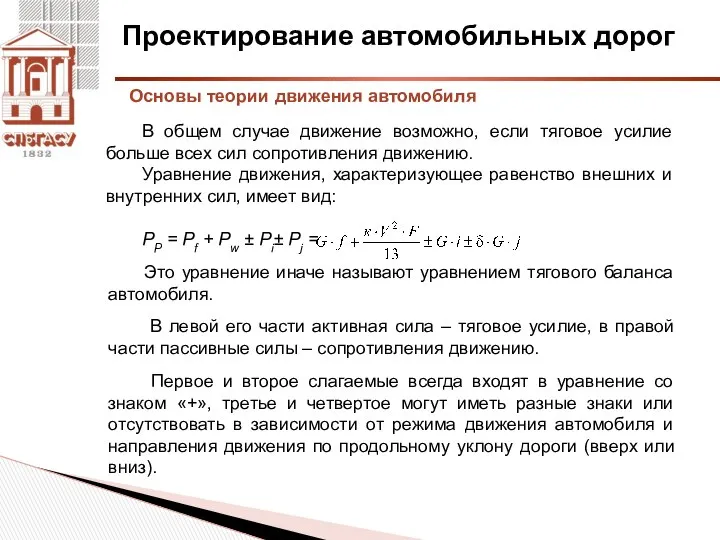
- 16. Проектирование автомобильных дорог В общем случае движение возможно, если тяговое усилие больше всех сил сопротивления движению.
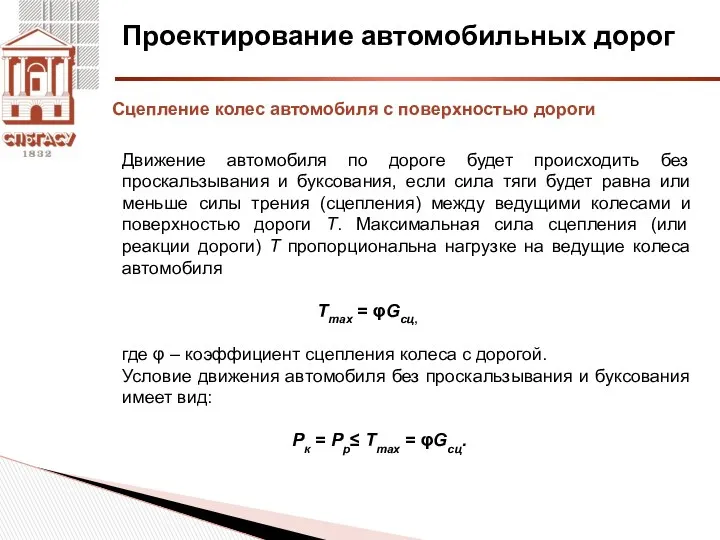
- 17. Проектирование автомобильных дорог Сцепление колес автомобиля с поверхностью дороги Движение автомобиля по дороге будет происходить без
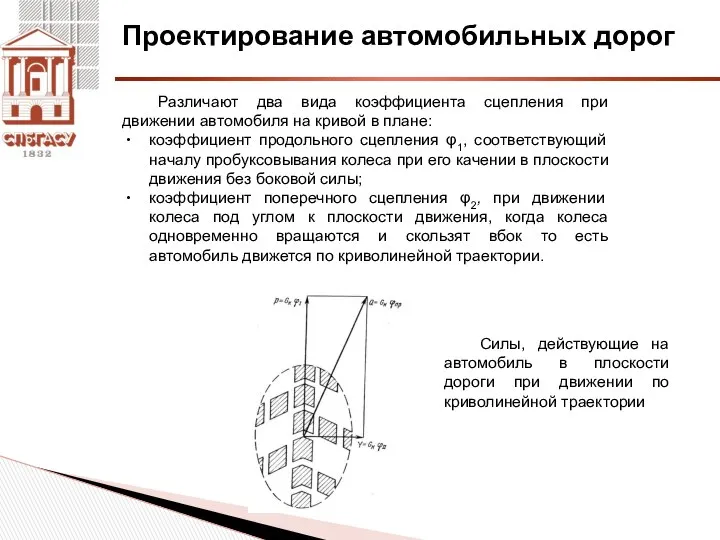
- 18. Проектирование автомобильных дорог Различают два вида коэффициента сцепления при движении автомобиля на кривой в плане: коэффициент
- 19. Проектирование автомобильных дорог От величины продольного коэффициента сцепления φ1 зависит безопасность движения при торможении автомобиля, от
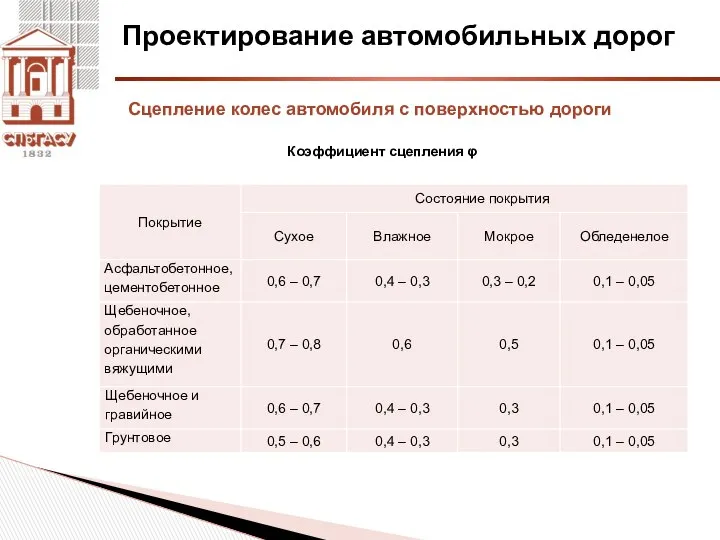
- 20. Проектирование автомобильных дорог Коэффициент сцепления φ Сцепление колес автомобиля с поверхностью дороги
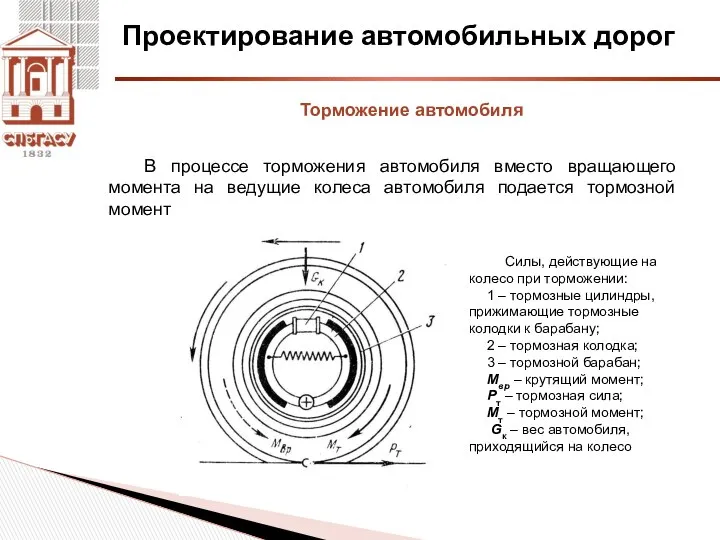
- 21. Проектирование автомобильных дорог Торможение автомобиля В процессе торможения автомобиля вместо вращающего момента на ведущие колеса автомобиля
- 22. Проектирование автомобильных дорог Уравнение движения при торможении имеет вид: – Рт = Рf + Рw ±
- 23. Проектирование автомобильных дорог При назначении геометрических элементов дорог нормируется величина пути, на которой водитель может остановить
- 24. Проектирование автомобильных дорог Заключение Технические параметры и геометрические элементы дороги (φ, f, i) должны назначаться с
- 25. СПАСИБО ЗА ВНИМАНИЕ!
- 27. Скачать презентацию
Проектирование автомобильных дорог
Категория дороги назначается по СНиП в зависимости от перспективной
Проектирование автомобильных дорог
Категория дороги назначается по СНиП в зависимости от перспективной
Проектирование автомобильных дорог
Коэффициенты приведения к легковому автомобилю
При промежуточных значениях грузоподъемности транспортных
Проектирование автомобильных дорог
Коэффициенты приведения к легковому автомобилю
При промежуточных значениях грузоподъемности транспортных
Проектирование автомобильных дорог
Основные элементы дороги
Элементы дороги размещают в пределах полосы
Проектирование автомобильных дорог
Основные элементы дороги
Элементы дороги размещают в пределах полосы
Проектирование автомобильных дорог
Дорогу в плане и продольном профиле надлежит проектировать из
Проектирование автомобильных дорог
Дорогу в плане и продольном профиле надлежит проектировать из
Проектирование автомобильных дорог
Требования, предъявляемые автомобилем к дороге
Наиболее важные факторы, влияющие на
Проектирование автомобильных дорог
Требования, предъявляемые автомобилем к дороге
Наиболее важные факторы, влияющие на
Проектирование автомобильных дорог
Требования, предъявляемые автомобилем к дороге
Автомобилем к дороге предъявляются следующие
Проектирование автомобильных дорог
Требования, предъявляемые автомобилем к дороге
Автомобилем к дороге предъявляются следующие
Проектирование автомобильных дорог
Основы теории движения автомобиля
Вращающий момент на коленчатом валу двигателя
Проектирование автомобильных дорог
Основы теории движения автомобиля
Вращающий момент на коленчатом валу двигателя
Проектирование автомобильных дорог
Основы теории движения автомобиля
Окружная сила Рк, передаваясь на покрытие,
Проектирование автомобильных дорог
Основы теории движения автомобиля
Окружная сила Рк, передаваясь на покрытие,
Проектирование автомобильных дорог
Основы теории движения автомобиля
Тяговое усилие затрачивается на преодоление сил
Проектирование автомобильных дорог
Основы теории движения автомобиля
Тяговое усилие затрачивается на преодоление сил
Проектирование автомобильных дорог
Сопротивление качению Pf вызывается затратой мощности двигателя на деформацию
Проектирование автомобильных дорог
Сопротивление качению Pf вызывается затратой мощности двигателя на деформацию
Проектирование автомобильных дорог
Основы теории движения автомобиля
Коэффициенты качения в зависимости от типа
Проектирование автомобильных дорог
Основы теории движения автомобиля
Коэффициенты качения в зависимости от типа
Проектирование автомобильных дорог
Основы теории движения автомобиля
Сопротивление воздушной среды Pw. вызывается затратой
Проектирование автомобильных дорог
Основы теории движения автомобиля
Сопротивление воздушной среды Pw. вызывается затратой
Проектирование автомобильных дорог
Сопротивление движению на подъеме Pi возникает при движении автомобиля
Проектирование автомобильных дорог
Сопротивление движению на подъеме Pi возникает при движении автомобиля
Проектирование автомобильных дорог
Инерционное сопротивление возникает при трогании автомобиля с места и
Проектирование автомобильных дорог
Инерционное сопротивление возникает при трогании автомобиля с места и
Проектирование автомобильных дорог
В общем случае движение возможно, если тяговое усилие больше
Проектирование автомобильных дорог
В общем случае движение возможно, если тяговое усилие больше
Проектирование автомобильных дорог
Сцепление колес автомобиля с поверхностью дороги
Движение автомобиля по дороге
Проектирование автомобильных дорог
Сцепление колес автомобиля с поверхностью дороги
Движение автомобиля по дороге
Проектирование автомобильных дорог
Различают два вида коэффициента сцепления при движении автомобиля на
Проектирование автомобильных дорог
Различают два вида коэффициента сцепления при движении автомобиля на
Проектирование автомобильных дорог
От величины продольного коэффициента сцепления φ1 зависит безопасность движения
Проектирование автомобильных дорог
От величины продольного коэффициента сцепления φ1 зависит безопасность движения
Проектирование автомобильных дорог
Коэффициент сцепления φ
Сцепление колес автомобиля с поверхностью дороги
Проектирование автомобильных дорог
Коэффициент сцепления φ
Сцепление колес автомобиля с поверхностью дороги
Проектирование автомобильных дорог
Торможение автомобиля
В процессе торможения автомобиля вместо вращающего момента на
Проектирование автомобильных дорог
Торможение автомобиля
В процессе торможения автомобиля вместо вращающего момента на
Проектирование автомобильных дорог
Уравнение движения при торможении имеет вид:
– Рт = Рf
Проектирование автомобильных дорог
Уравнение движения при торможении имеет вид:
– Рт = Рf
Проектирование автомобильных дорог
При назначении геометрических элементов дорог нормируется величина пути, на
Проектирование автомобильных дорог
При назначении геометрических элементов дорог нормируется величина пути, на
Проектирование автомобильных дорог
Заключение
Технические параметры и геометрические элементы дороги (φ, f, i)
Проектирование автомобильных дорог
Заключение
Технические параметры и геометрические элементы дороги (φ, f, i)
СПАСИБО
ЗА ВНИМАНИЕ!
СПАСИБО
ЗА ВНИМАНИЕ!
 Droga krzyżowa
Droga krzyżowa Сравнительный анализ фазы отталкивания в различных способах прыжка в высоту с разбега у женщин
Сравнительный анализ фазы отталкивания в различных способах прыжка в высоту с разбега у женщин Производство суспензий и эмульсий
Производство суспензий и эмульсий Понятие, цели и этапы деловой оценки персонала
Понятие, цели и этапы деловой оценки персонала Рынок и отрасль
Рынок и отрасль  Методы расчета статически определимых систем на постоянную нагрузку
Методы расчета статически определимых систем на постоянную нагрузку Гипергенные процессы
Гипергенные процессы Личные права супругов по состоянию на данный момент
Личные права супругов по состоянию на данный момент Международное публичное право. ООН: история, структура, цели и задачи
Международное публичное право. ООН: история, структура, цели и задачи Автономный инвертор напряжения с синусоидальным выходным напряжением
Автономный инвертор напряжения с синусоидальным выходным напряжением Запорожье. Бердянск вчера и сегодня. - презентация
Запорожье. Бердянск вчера и сегодня. - презентация Поймай рыбку - презентация для начальной школы
Поймай рыбку - презентация для начальной школы ПОЛОЖИТЕЛЬНЫЙ СТОЛБ ТЛЕЮЩЕГО РАЗРЯДА
ПОЛОЖИТЕЛЬНЫЙ СТОЛБ ТЛЕЮЩЕГО РАЗРЯДА  Простейшие конструкции языка Pascal
Простейшие конструкции языка Pascal Белаз 7519
Белаз 7519 Программирование на языке С++
Программирование на языке С++ Шаблон_ПРЕДПРИЯТИЯ
Шаблон_ПРЕДПРИЯТИЯ Кроссфит
Кроссфит Конденсаторы и катушки индуктивности
Конденсаторы и катушки индуктивности Короли госзаказа
Короли госзаказа Реализация проекта «Аэродинамический комплекс»
Реализация проекта «Аэродинамический комплекс» «Виды и методы контроля знаний учащихся при изучении истории и обществознания»
«Виды и методы контроля знаний учащихся при изучении истории и обществознания» Разветвляющиеся алгоритмы
Разветвляющиеся алгоритмы 7 класс
7 класс  Wyrusz z Chrystusem na drogę krzyżową
Wyrusz z Chrystusem na drogę krzyżową СПИД
СПИД  Общие положения исполнения наказания
Общие положения исполнения наказания  Отношения Украины и России
Отношения Украины и России