- Методы расчета статически определимых систем на постоянную нагрузку

Содержание
- 2. Решение задачи определения напряженно-деформированного состояния (НДС) сооружения состоит из следующих частей: − определение напряжений; − определение
- 3. 1. Определение опорных реакций Сооружение, воспринимая внешнюю нагрузку, через свои элементы передает ее опорам, а в
- 4. В элементах плоской стержневой системы возникают три внутренних усилия: 2. Внутренние усилия стержневой системы N −
- 5. Между Q и М существует дифференциальная зависимость (формула Журавского): Для определения знака Q по M ось
- 6. 3. Методы определения внутренних усилий Внутренние усилия определяются методами простых сечений, совместных сечений, вырезания узла и
- 7. 3.2. Метод совместных сечений Используется при расчете многодисковых систем. Например, при расчете трехдисковой рамы проводятся три
- 8. 3.3. Метод вырезания узла Используется для определения усилий простых систем. Его сущность: вырезается узел с не
- 9. 3.4. Метод замены связей Используется при расчете сложных статически определимых систем, которые трудно рассчитать другими способами.
- 10. Предыдущее уравнение примет вид: X + MC,P =0, где =1⋅ a = a – момент в
- 12. Скачать презентацию
Решение задачи определения напряженно-деформированного состояния (НДС) сооружения состоит из следующих
Решение задачи определения напряженно-деформированного состояния (НДС) сооружения состоит из следующих
1. Определение опорных реакций
Сооружение, воспринимая внешнюю нагрузку, через свои
1. Определение опорных реакций
Сооружение, воспринимая внешнюю нагрузку, через свои
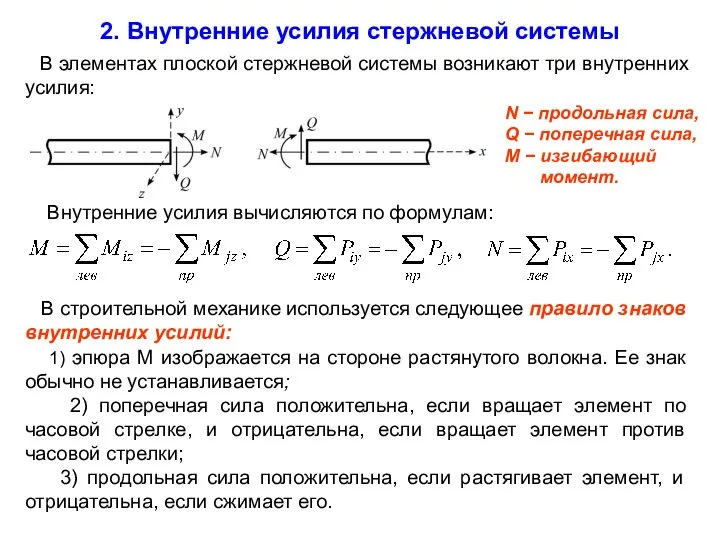
В элементах плоской стержневой системы возникают три внутренних усилия:
2. Внутренние
В элементах плоской стержневой системы возникают три внутренних усилия:
2. Внутренние
Между Q и М существует дифференциальная зависимость (формула Журавского):
Для определения
Между Q и М существует дифференциальная зависимость (формула Журавского):
Для определения
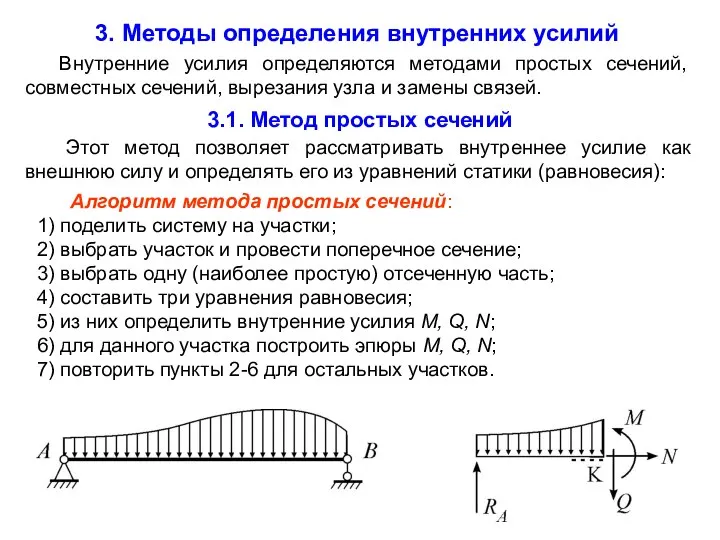
3. Методы определения внутренних усилий
Внутренние усилия определяются методами
3. Методы определения внутренних усилий
Внутренние усилия определяются методами
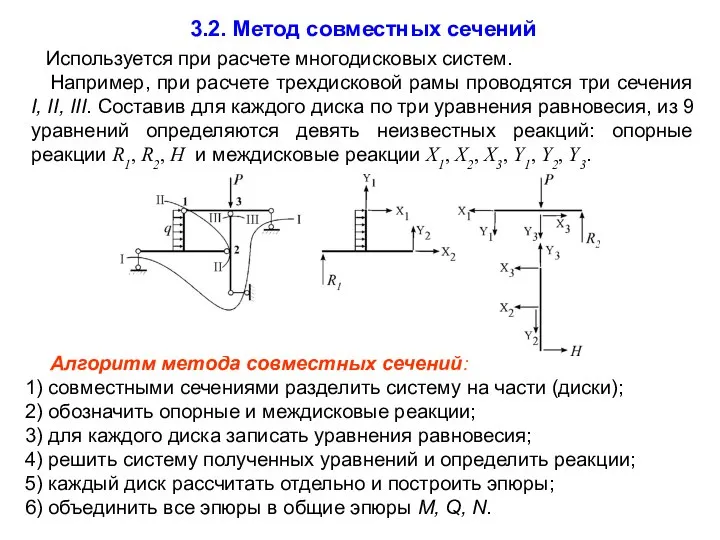
3.2. Метод совместных сечений
Используется при расчете многодисковых систем.
Например,
3.2. Метод совместных сечений
Используется при расчете многодисковых систем.
Например,
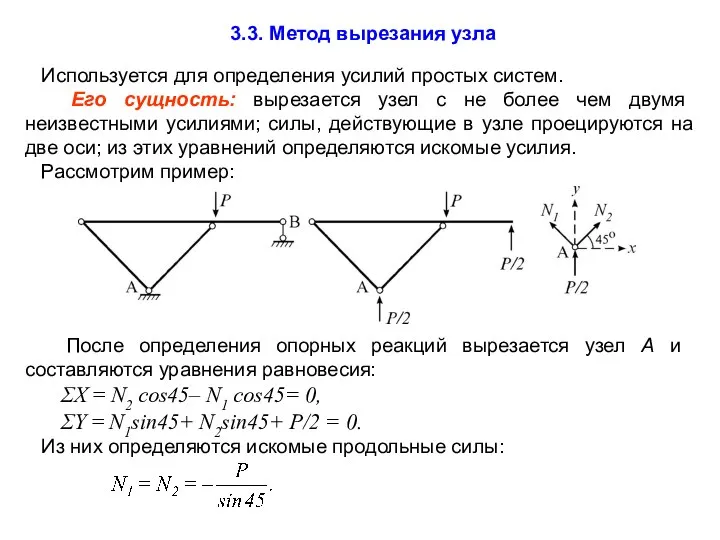
3.3. Метод вырезания узла
Используется для определения усилий простых систем.
3.3. Метод вырезания узла
Используется для определения усилий простых систем.
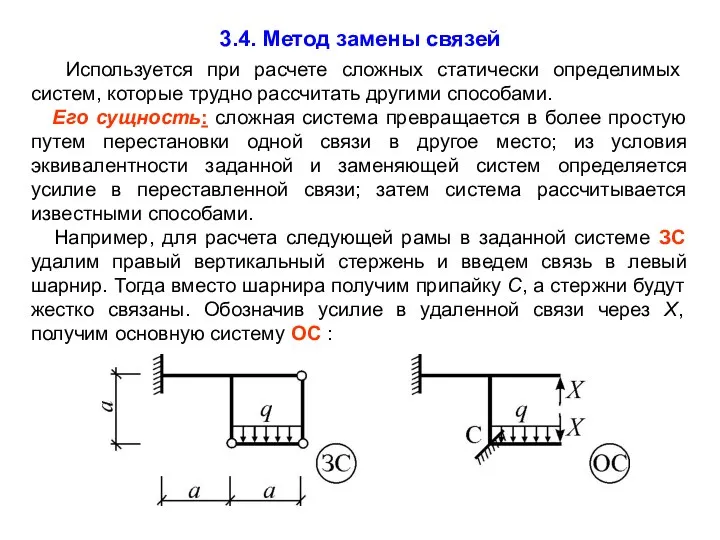
3.4. Метод замены связей
Используется при расчете сложных статически определимых систем,
3.4. Метод замены связей
Используется при расчете сложных статически определимых систем,
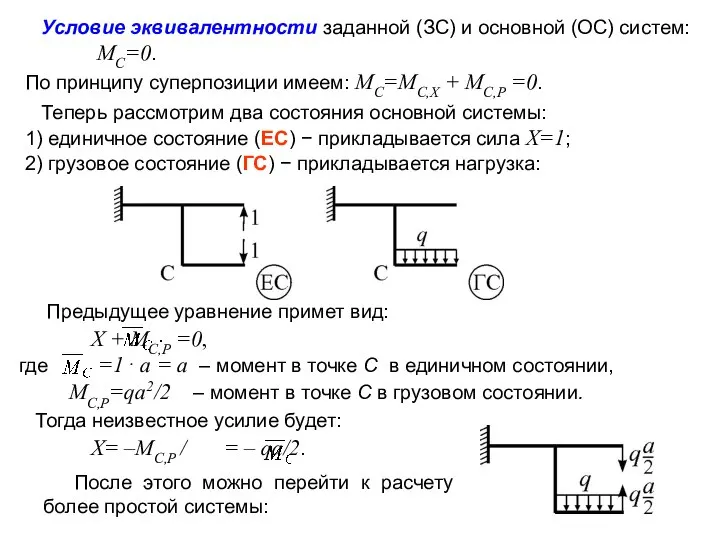
Предыдущее уравнение примет вид:
X + MC,P =0,
где =1⋅ a
Предыдущее уравнение примет вид:
X + MC,P =0,
где =1⋅ a
 Тема лекции: Противодиабетические средства Доцент кафедры общей и клинической фармакологии с курсом ФПК и ПК Владимир Михайл
Тема лекции: Противодиабетические средства Доцент кафедры общей и клинической фармакологии с курсом ФПК и ПК Владимир Михайл Сохранение природы. Вторичное использование вещей
Сохранение природы. Вторичное использование вещей Общая физическая и спортивная подготовка в системе физического воспитания. (Часть 2)
Общая физическая и спортивная подготовка в системе физического воспитания. (Часть 2) Презентация "Крымская Ярмарка" - скачать презентации по Экономике
Презентация "Крымская Ярмарка" - скачать презентации по Экономике Опорно-двигательная система человека Гейс Евгений 11 А
Опорно-двигательная система человека Гейс Евгений 11 А  Budowa i integracja systemów informacyjnych
Budowa i integracja systemów informacyjnych Портфель и архитектура бренда
Портфель и архитектура бренда Массивно-параллельные системы
Массивно-параллельные системы Сварочный выпрямитель
Сварочный выпрямитель Чрезвычайные ситуации на морском транспорте
Чрезвычайные ситуации на морском транспорте Начальная максимальная цена контракта
Начальная максимальная цена контракта Литература и искусство первой половины XIX века
Литература и искусство первой половины XIX века Роль физической активности и спорта в сохранении здоровья
Роль физической активности и спорта в сохранении здоровья Бюджетний процес у Франції
Бюджетний процес у Франції Сборник материалов о зайце Составила Бутакова Валерия, ученица 2 класса
Сборник материалов о зайце Составила Бутакова Валерия, ученица 2 класса Методическое пособие для школьных психологов «Психологическая подготовка учащихся к ЕГЭ»
Методическое пособие для школьных психологов «Психологическая подготовка учащихся к ЕГЭ» Вспомогательный алгоритм
Вспомогательный алгоритм Систематизация и классификация знаний в судебной экспертизе
Систематизация и классификация знаний в судебной экспертизе Принятие ислама башкирами
Принятие ислама башкирами Презентация "Экономика и ее роль в жизни общества" - скачать презентации по Экономике_
Презентация "Экономика и ее роль в жизни общества" - скачать презентации по Экономике_ Недействительность сделки, совершенной под влиянием заблуждения Подготовила: студентка ФТД-2, группы Т094 Алиев Эльвин
Недействительность сделки, совершенной под влиянием заблуждения Подготовила: студентка ФТД-2, группы Т094 Алиев Эльвин Презентация Полимеры и пластмассы
Презентация Полимеры и пластмассы Участие в системе БЭСП Банка России: требования, порядок и управление участием
Участие в системе БЭСП Банка России: требования, порядок и управление участием Дидактическая игра «ОПРЕДЕЛИ музыкальный ИНСТРУМЕНТ» .
Дидактическая игра «ОПРЕДЕЛИ музыкальный ИНСТРУМЕНТ» .  Защита детей от информации, причиняющей вред их здоровью развитию
Защита детей от информации, причиняющей вред их здоровью развитию Свойства веществ
Свойства веществ  кто работает на свиной фабрике - презентация для начальной школы
кто работает на свиной фабрике - презентация для начальной школы Изобразительное искусство в семье пластических искусств
Изобразительное искусство в семье пластических искусств