- Без названия

Содержание
- 2. Гидравлический экскаватор с обратной лопатой 1 - поворотная платформа; 2 - двигатель; 3 - кабина; 4
- 3. Рабочая зона гидравлического экскаватора αсн ≤ 52 ÷ 45° - угол опускания стрелы от горизонтального положения;
- 4. Построение рабочей зоны гидравлического экскаватора 1. Отмечается место расположения шарнира крепления стрелы к экскаватору в т.
- 5. Построение рабочей зоны гидравлического экскаватора - крайние положения движения выпрямленной лопаты (максимальный размах), когда стрела находится
- 6. Построение рабочей зоны гидравлического экскаватора 3. Строится траектория движения кромки ковша при движении лопаты из крайнего
- 7. Построение рабочей зоны гидравлического экскаватора 4. Строится траектория движения кромки ковша при движении лопаты из крайнего
- 9. Скачать презентацию
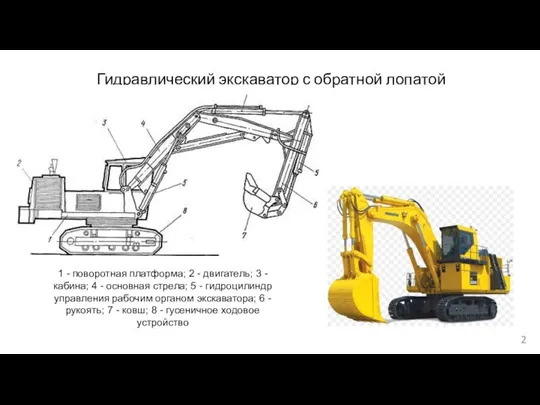
Гидравлический экскаватор с обратной лопатой
1 - поворотная платформа; 2 - двигатель;
Гидравлический экскаватор с обратной лопатой
1 - поворотная платформа; 2 - двигатель;
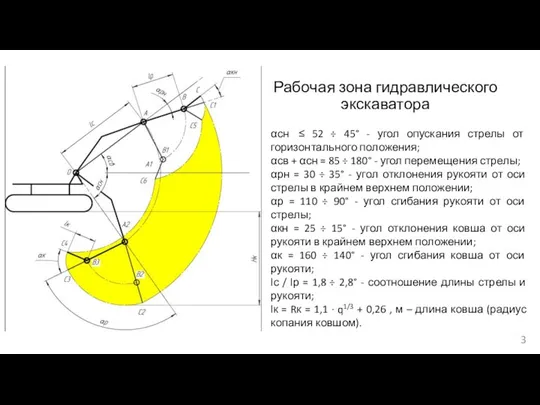
Рабочая зона гидравлического экскаватора
αсн ≤ 52 ÷ 45° - угол опускания
Рабочая зона гидравлического экскаватора
αсн ≤ 52 ÷ 45° - угол опускания

Построение рабочей зоны гидравлического экскаватора
1. Отмечается место расположения шарнира крепления стрелы
Построение рабочей зоны гидравлического экскаватора
1. Отмечается место расположения шарнира крепления стрелы
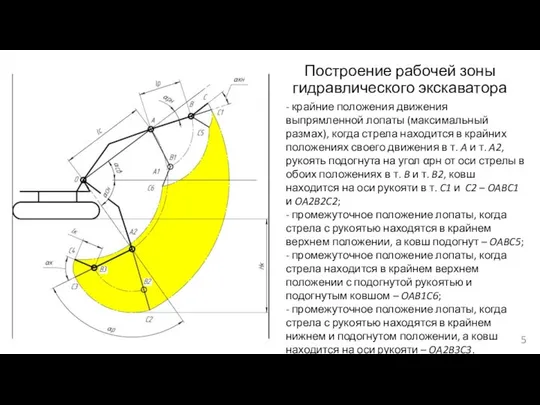
Построение рабочей зоны гидравлического экскаватора
- крайние положения движения выпрямленной лопаты (максимальный
Построение рабочей зоны гидравлического экскаватора
- крайние положения движения выпрямленной лопаты (максимальный

Построение рабочей зоны гидравлического экскаватора
3. Строится траектория движения кромки ковша при
Построение рабочей зоны гидравлического экскаватора
3. Строится траектория движения кромки ковша при

Построение рабочей зоны гидравлического экскаватора
4. Строится траектория движения кромки ковша при
Построение рабочей зоны гидравлического экскаватора
4. Строится траектория движения кромки ковша при
 Эмболия-2
Эмболия-2 Технология CUDA в решений математической физики
Технология CUDA в решений математической физики კომპანია „Clean Tech”-ის შემოთავაზება
კომპანია „Clean Tech”-ის შემოთავაზება Sultan Sartaevich Sartaev
Sultan Sartaevich Sartaev Французская кухня
Французская кухня Общие положения о праве Автор: к.ю.н., Ильницкая Л.И.
Общие положения о праве Автор: к.ю.н., Ильницкая Л.И. Разминка Философия
Разминка Философия Технология зимнего содержания автомобильных дорог не общего пользования. Слайды к лекции № 4
Технология зимнего содержания автомобильных дорог не общего пользования. Слайды к лекции № 4 Золушка Художник Сергий Елена
Золушка Художник Сергий Елена  Помехи радиолокационному наблюдению и борьба с ними
Помехи радиолокационному наблюдению и борьба с ними СЛАЙДЫ ПО ТЕОРИИ ГОСУДАРСТВА
СЛАЙДЫ ПО ТЕОРИИ ГОСУДАРСТВА Презентация "Шишкин." - скачать презентации по МХК
Презентация "Шишкин." - скачать презентации по МХК Подготовка преподавателей, обучающих водителей, сотрудников служб приемам оказания первой помощи, состояние и перспективы раз
Подготовка преподавателей, обучающих водителей, сотрудников служб приемам оказания первой помощи, состояние и перспективы раз Экономическое развитие России в начале XX века
Экономическое развитие России в начале XX века  Российская модель управления Российская модель управления базируется на системе ценностных ориентиров народа, вытекающих
Российская модель управления Российская модель управления базируется на системе ценностных ориентиров народа, вытекающих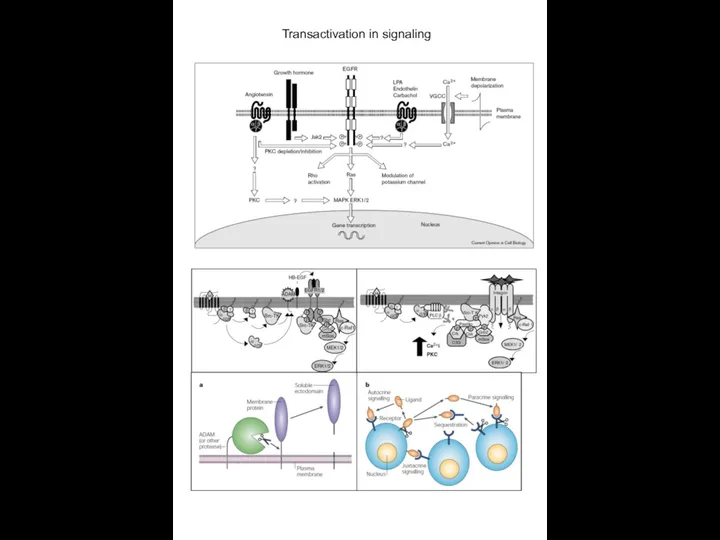 Transactivation
Transactivation Презентация ГАТС ВТО
Презентация ГАТС ВТО Культура Культура Древнего Китая
Культура Культура Древнего Китая Технология ремонта кузовов автомобиля
Технология ремонта кузовов автомобиля Разработка инструментария для изучения образовательных потребностей и интересов обучающихся начальной ступени общего образов
Разработка инструментария для изучения образовательных потребностей и интересов обучающихся начальной ступени общего образов Стратегічне планування діяльності готельних підприємств на прикладі гостелю «Братислава»
Стратегічне планування діяльності готельних підприємств на прикладі гостелю «Братислава» Внутренняя политика России в 1894-1904 гг
Внутренняя политика России в 1894-1904 гг Правонарушение. Понятие и признаки
Правонарушение. Понятие и признаки Урок обучения грамоте по теме: «Закрепление изученного. С.42» Составила учитель начальных классов МБОУ гимназии №14 г. Одинцово Боч
Урок обучения грамоте по теме: «Закрепление изученного. С.42» Составила учитель начальных классов МБОУ гимназии №14 г. Одинцово Боч Творческий проект «Тренажер для тренировки спины»
Творческий проект «Тренажер для тренировки спины» Презентация на тему "Введение ФГОС начального общего образования: с чего начать?" - скачать презентации по Педагогике
Презентация на тему "Введение ФГОС начального общего образования: с чего начать?" - скачать презентации по Педагогике Родом из бетонной коробки, или новейшая архитектура Петербурга
Родом из бетонной коробки, или новейшая архитектура Петербурга Интерфейс. Классификация интерфейсов ПК
Интерфейс. Классификация интерфейсов ПК