- Численные методы

Содержание
- 2. Математические модели и численные методы Первый этап математического анализа – это создание математической модели (постановка задачи).
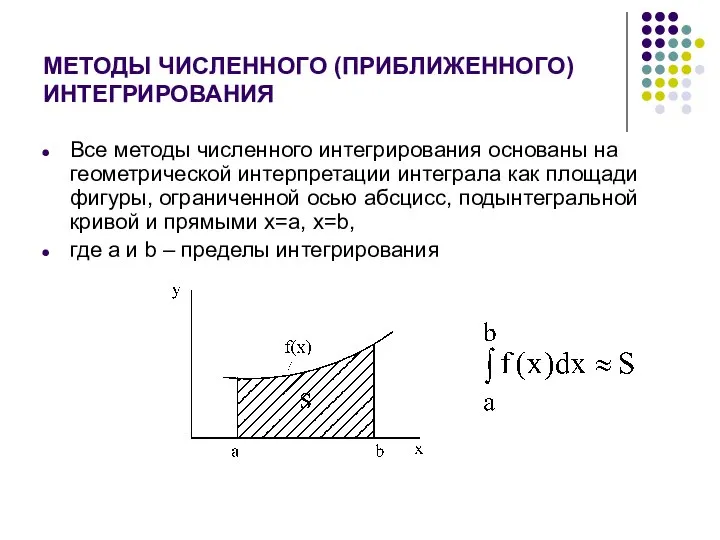
- 3. МЕТОДЫ ЧИСЛЕННОГО (ПРИБЛИЖЕННОГО) ИНТЕГРИРОВАНИЯ Все методы численного интегрирования основаны на геометрической интерпретации интеграла как площади фигуры,
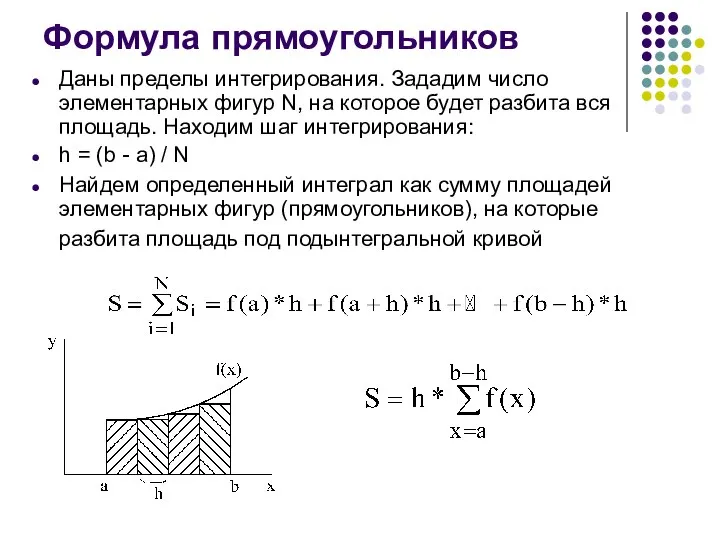
- 4. Формула прямоугольников Даны пределы интегрирования. Зададим число элементарных фигур N, на которое будет разбита вся площадь.
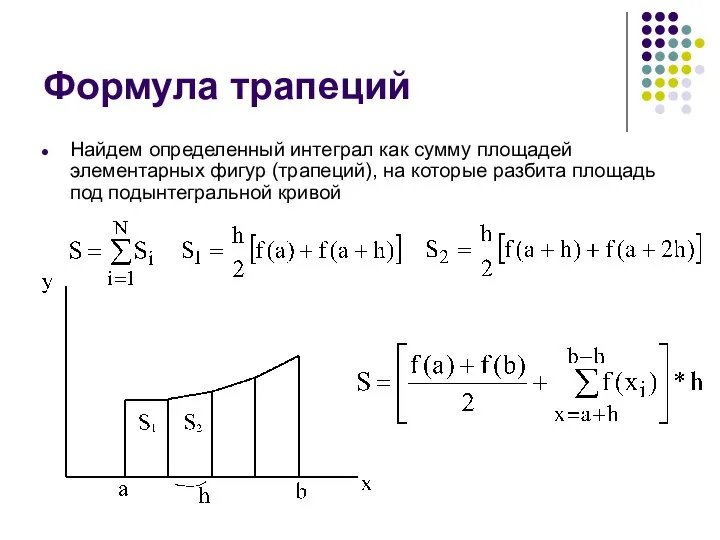
- 5. Формула трапеций Найдем определенный интеграл как сумму площадей элементарных фигур (трапеций), на которые разбита площадь под
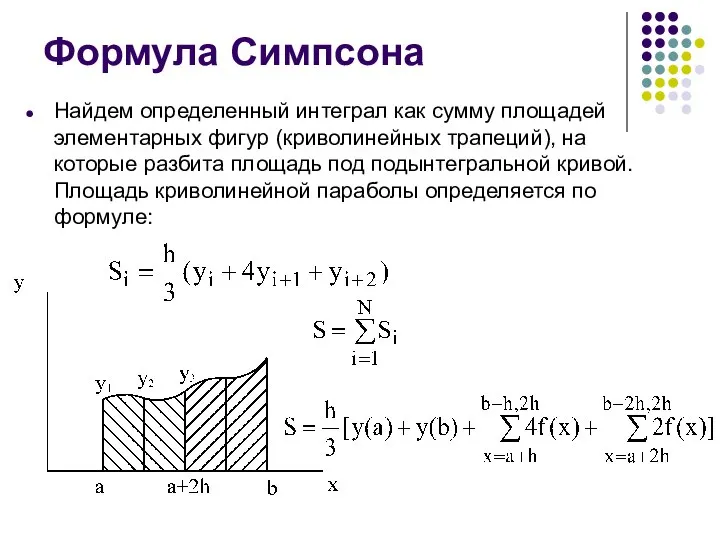
- 6. Формула Симпсона Найдем определенный интеграл как сумму площадей элементарных фигур (криволинейных трапеций), на которые разбита площадь
- 7. ПРИНЦИПЫ МАШИННОГО РЕШЕНИЯ ЗАДАЧ АППРОКСИМАЦИИ И ИНТЕРПОЛЯЦИИ Одной из важнейших задач в процессе математического моделирования является
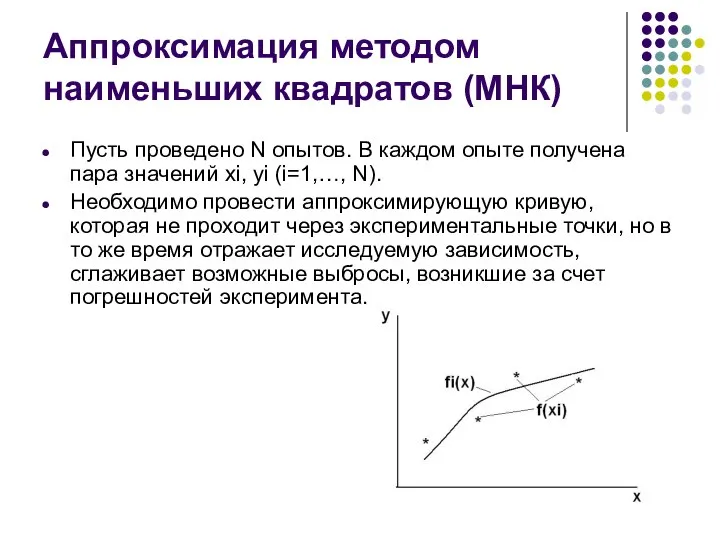
- 8. Аппроксимация методом наименьших квадратов (МНК) Пусть проведено N опытов. В каждом опыте получена пара значений xi,
- 9. Пусть функция ϕ(x) - аппроксимирующая функция для дискретной зависимости f(xi). В узлах xi функции f(xi) и
- 10. Зададимся видом функции ϕ(x). Обычно проводят аппроксимацию полиномами n-й степени. Общий вид полинома n-й степени :
- 11. Ищем коэффициенты a0, a1. Исследуем функцию Q на экстремум, т.е. найдем частные производные и приравняем нулю.
- 12. Получим в итоге систему линейных уравнений: Запишем систему в векторной форме: D*A = C где A
- 13. Интерполяция Задача приближения таблично заданной функции многочленом, когда принимается, что заменяющая функция должна проходить через заданные
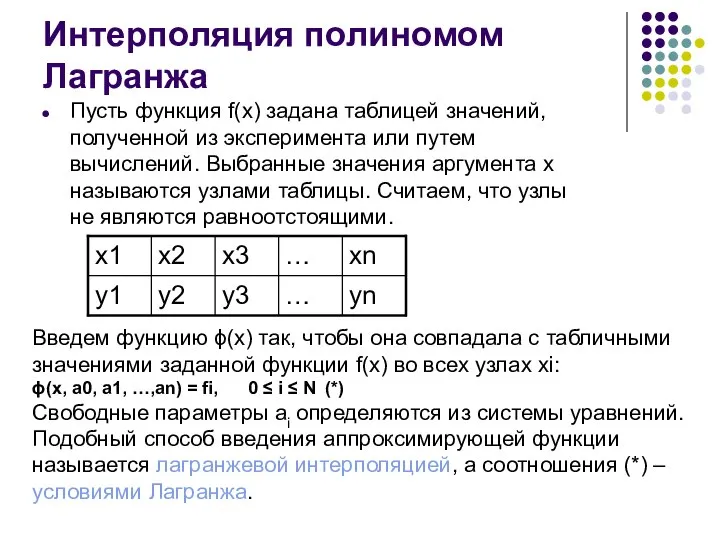
- 14. Интерполяция полиномом Лагранжа Пусть функция f(x) задана таблицей значений, полученной из эксперимента или путем вычислений. Выбранные
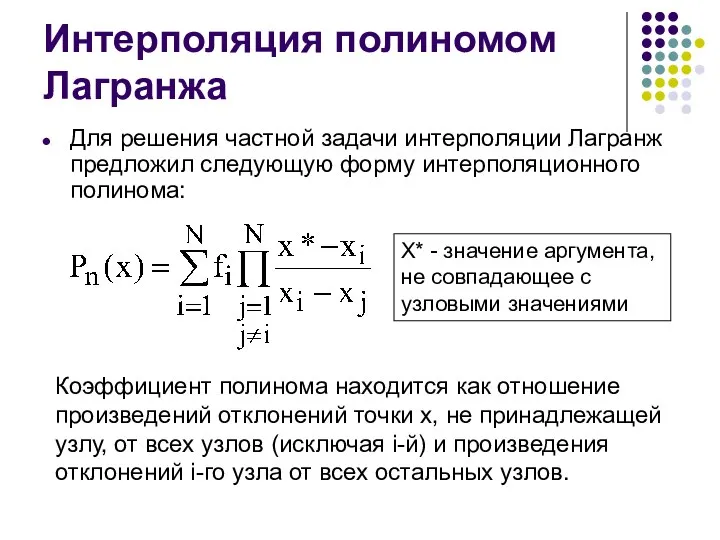
- 15. Интерполяция полиномом Лагранжа Для решения частной задачи интерполяции Лагранж предложил следующую форму интерполяционного полинома: Коэффициент полинома
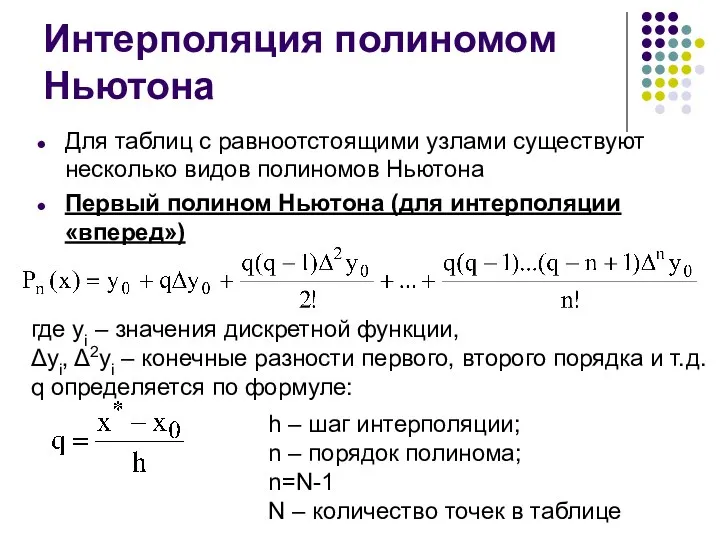
- 16. Интерполяция полиномом Ньютона Для таблиц с равноотстоящими узлами существуют несколько видов полиномов Ньютона Первый полином Ньютона
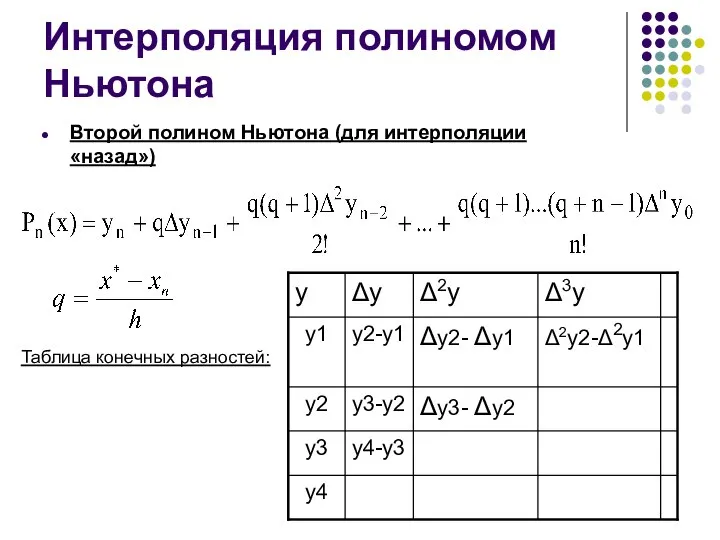
- 17. Интерполяция полиномом Ньютона Второй полином Ньютона (для интерполяции «назад») Таблица конечных разностей:
- 18. Численное решение обыкновенных дифференциальных уравнений (ОДУ) ОДУ широко используется для мат. моделирования процессов и явлений в
- 19. Уравнение (1) и эквивалентная ему система (2) имеют бесконечное множество решений. Единственное решение выделяют с помощью
- 20. Задача Коши (задача с начальными условиями) Кроме исходного уравнения (1) в некоторой точке x0 заданы начальные
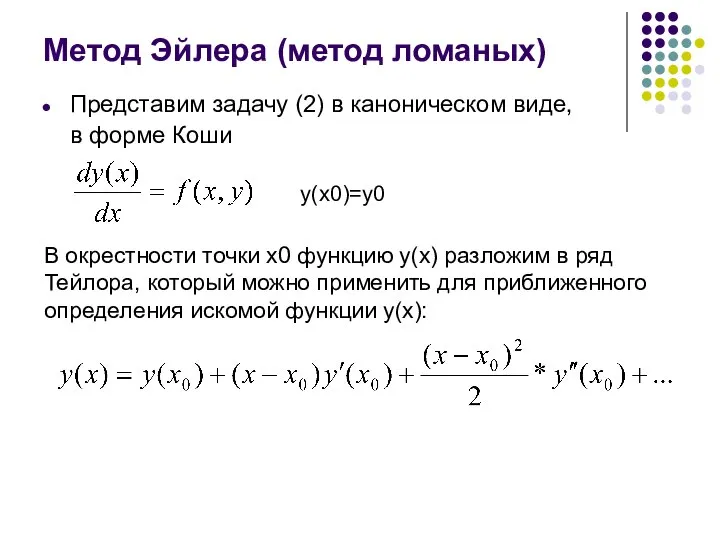
- 21. Метод Эйлера (метод ломаных) Представим задачу (2) в каноническом виде, в форме Коши y(x0)=y0 В окрестности
- 22. В точке x0+h при малых значениях h можно ограничиться двумя членами ряда y(x0+h) = y0 +
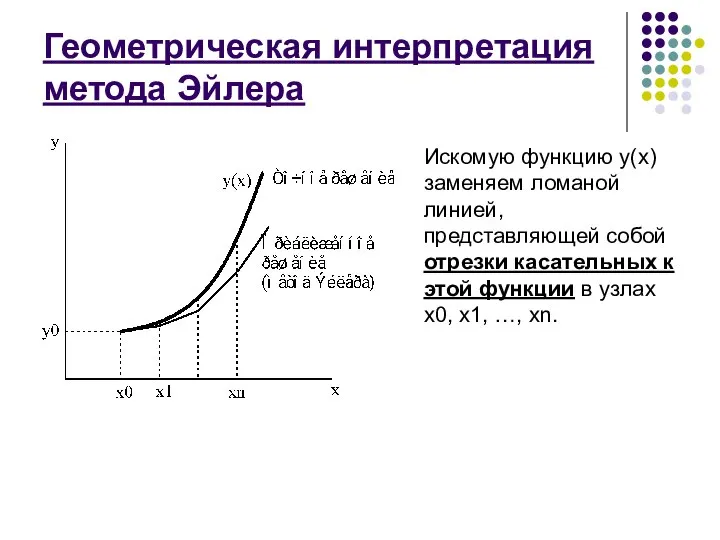
- 23. Геометрическая интерпретация метода Эйлера Искомую функцию y(x) заменяем ломаной линией, представляющей собой отрезки касательных к этой
- 24. Метод Рунге-Кутта Для уменьшения погрешности метода интегрирования ОДУ, использующего разложение искомого решения в ряд Тейлора, необходимо
- 25. Метод Рунге-Кутта 4го порядка В зависимости от старшей степени h, с которой учитываются члены ряда, существуют
- 27. Скачать презентацию
Математические модели и численные методы
Первый этап математического анализа – это создание
Математические модели и численные методы
Первый этап математического анализа – это создание
МЕТОДЫ ЧИСЛЕННОГО (ПРИБЛИЖЕННОГО) ИНТЕГРИРОВАНИЯ
Все методы численного интегрирования основаны на геометрической интерпретации
МЕТОДЫ ЧИСЛЕННОГО (ПРИБЛИЖЕННОГО) ИНТЕГРИРОВАНИЯ
Все методы численного интегрирования основаны на геометрической интерпретации
Формула прямоугольников
Даны пределы интегрирования. Зададим число элементарных фигур N, на которое
Формула прямоугольников
Даны пределы интегрирования. Зададим число элементарных фигур N, на которое
Формула трапеций
Найдем определенный интеграл как сумму площадей элементарных фигур (трапеций), на
Формула трапеций
Найдем определенный интеграл как сумму площадей элементарных фигур (трапеций), на
Формула Симпсона
Найдем определенный интеграл как сумму площадей элементарных фигур (криволинейных трапеций),
Формула Симпсона
Найдем определенный интеграл как сумму площадей элементарных фигур (криволинейных трапеций),
ПРИНЦИПЫ МАШИННОГО РЕШЕНИЯ ЗАДАЧ АППРОКСИМАЦИИ И ИНТЕРПОЛЯЦИИ
Одной из важнейших задач
ПРИНЦИПЫ МАШИННОГО РЕШЕНИЯ ЗАДАЧ АППРОКСИМАЦИИ И ИНТЕРПОЛЯЦИИ
Одной из важнейших задач
Аппроксимация методом наименьших квадратов (МНК)
Пусть проведено N опытов. В каждом опыте
Аппроксимация методом наименьших квадратов (МНК)
Пусть проведено N опытов. В каждом опыте
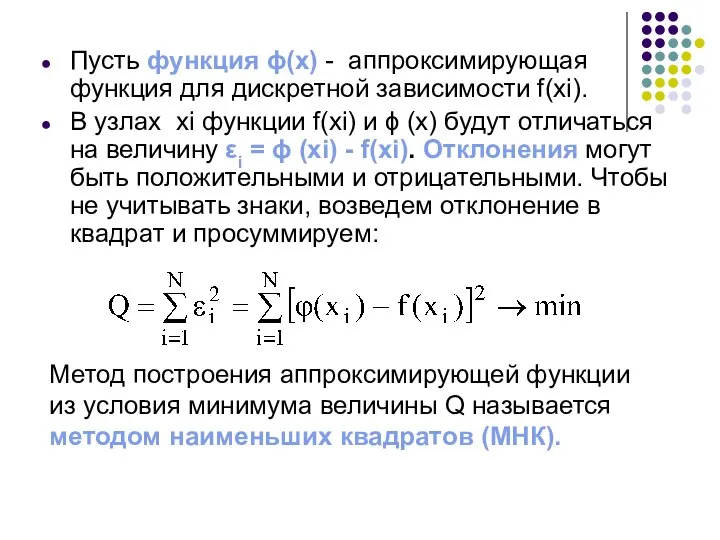
Пусть функция ϕ(x) - аппроксимирующая функция для дискретной зависимости f(xi).
В
Пусть функция ϕ(x) - аппроксимирующая функция для дискретной зависимости f(xi).
В
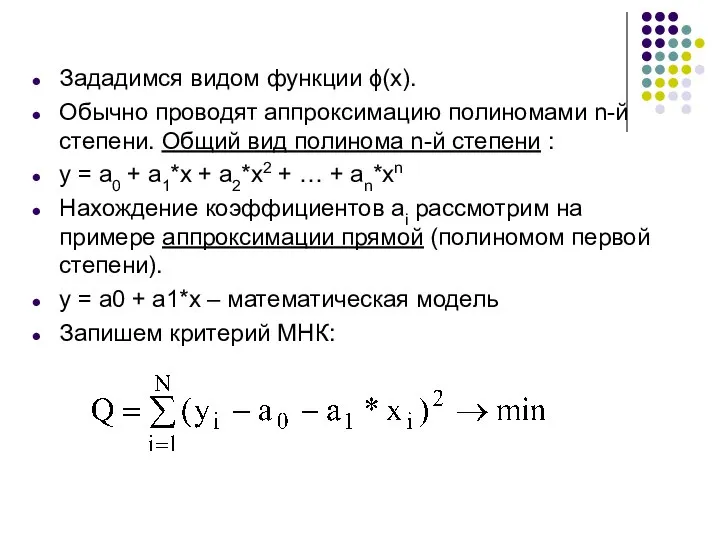
Зададимся видом функции ϕ(x).
Обычно проводят аппроксимацию полиномами n-й степени. Общий вид
Зададимся видом функции ϕ(x).
Обычно проводят аппроксимацию полиномами n-й степени. Общий вид
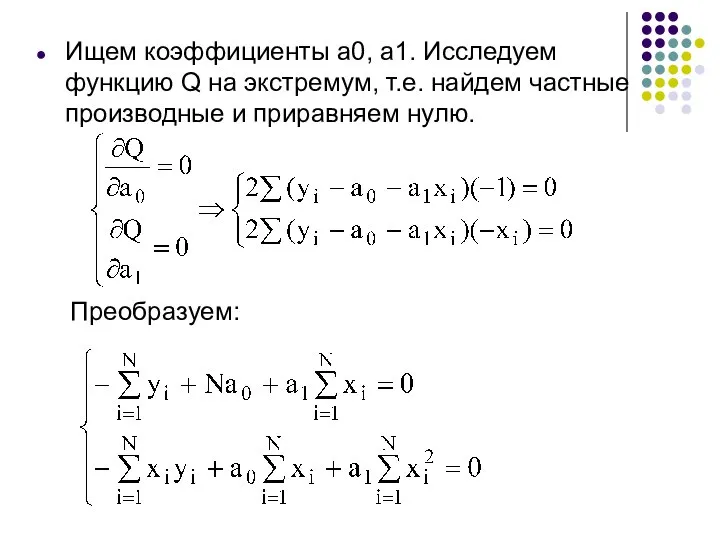
Ищем коэффициенты a0, a1. Исследуем функцию Q на экстремум, т.е. найдем
Ищем коэффициенты a0, a1. Исследуем функцию Q на экстремум, т.е. найдем
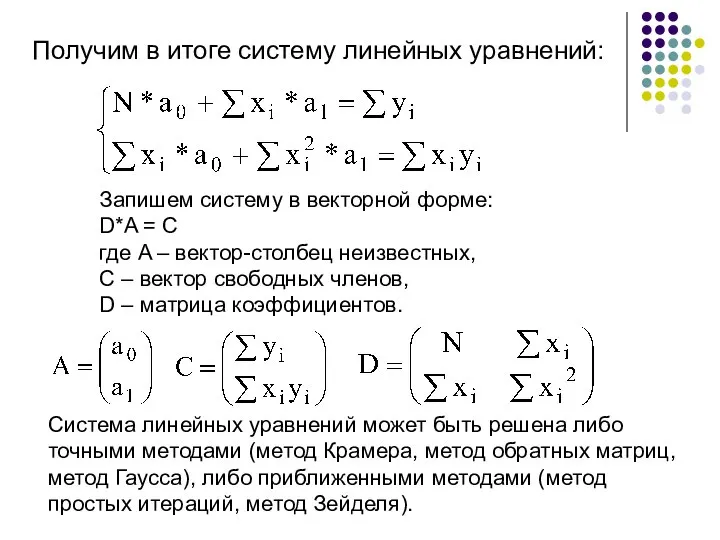
Получим в итоге систему линейных уравнений:
Запишем систему в векторной форме:
D*A =
Получим в итоге систему линейных уравнений:
Запишем систему в векторной форме:
D*A =
Интерполяция
Задача приближения таблично заданной функции многочленом, когда принимается, что заменяющая функция
Интерполяция
Задача приближения таблично заданной функции многочленом, когда принимается, что заменяющая функция
Интерполяция полиномом Лагранжа
Пусть функция f(x) задана таблицей значений, полученной из эксперимента
Интерполяция полиномом Лагранжа
Пусть функция f(x) задана таблицей значений, полученной из эксперимента
Интерполяция полиномом Лагранжа
Для решения частной задачи интерполяции Лагранж предложил следующую форму
Интерполяция полиномом Лагранжа
Для решения частной задачи интерполяции Лагранж предложил следующую форму
Интерполяция полиномом Ньютона
Для таблиц с равноотстоящими узлами существуют несколько видов полиномов
Интерполяция полиномом Ньютона
Для таблиц с равноотстоящими узлами существуют несколько видов полиномов
Интерполяция полиномом Ньютона
Второй полином Ньютона (для интерполяции «назад»)
Таблица конечных разностей:
Интерполяция полиномом Ньютона
Второй полином Ньютона (для интерполяции «назад»)
Таблица конечных разностей:
Численное решение обыкновенных дифференциальных уравнений (ОДУ)
ОДУ широко используется для мат. моделирования
Численное решение обыкновенных дифференциальных уравнений (ОДУ)
ОДУ широко используется для мат. моделирования
Уравнение (1) и эквивалентная ему система (2) имеют бесконечное множество решений.
Единственное
Уравнение (1) и эквивалентная ему система (2) имеют бесконечное множество решений.
Единственное
Задача Коши (задача с начальными условиями)
Кроме исходного уравнения (1) в некоторой
Задача Коши (задача с начальными условиями)
Кроме исходного уравнения (1) в некоторой
Метод Эйлера (метод ломаных)
Представим задачу (2) в каноническом виде,
в форме
Метод Эйлера (метод ломаных)
Представим задачу (2) в каноническом виде, в форме
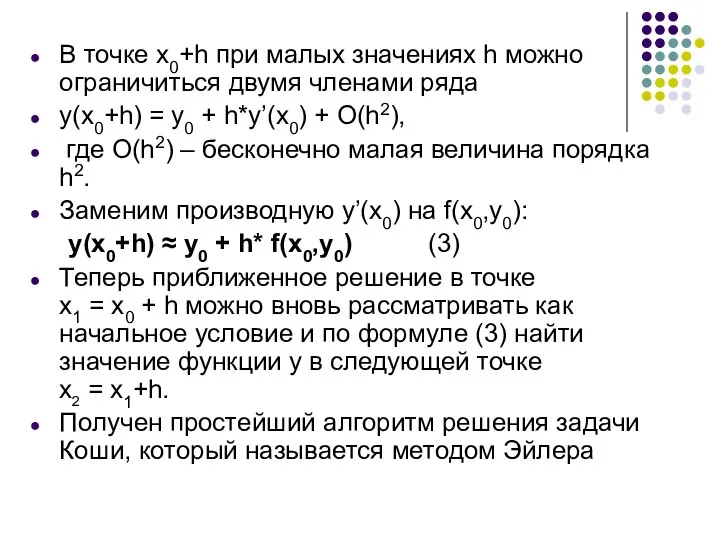
В точке x0+h при малых значениях h можно ограничиться двумя членами
В точке x0+h при малых значениях h можно ограничиться двумя членами
Геометрическая интерпретация метода Эйлера
Искомую функцию y(x) заменяем ломаной линией, представляющей
Геометрическая интерпретация метода Эйлера
Искомую функцию y(x) заменяем ломаной линией, представляющей
Метод Рунге-Кутта
Для уменьшения погрешности метода интегрирования ОДУ, использующего разложение искомого решения
Метод Рунге-Кутта
Для уменьшения погрешности метода интегрирования ОДУ, использующего разложение искомого решения
Метод Рунге-Кутта 4го порядка
В зависимости от старшей степени h, с которой
Метод Рунге-Кутта 4го порядка
В зависимости от старшей степени h, с которой
 Консерваторы в конце 50-ых и в начале 60-ых гг.
Консерваторы в конце 50-ых и в начале 60-ых гг. Идеал семейной жизни в житиях русских святых
Идеал семейной жизни в житиях русских святых Программирование на языке Java. Примитивные типы данных. Операции, комментарии. (Лекция 2.1)
Программирование на языке Java. Примитивные типы данных. Операции, комментарии. (Лекция 2.1) Застольный этикет
Застольный этикет Istoria_razvitia_nevrologii
Istoria_razvitia_nevrologii Перфоманс, хэппенинг, инсталляция
Перфоманс, хэппенинг, инсталляция Конституційно-правова відповідальність
Конституційно-правова відповідальність Ленинградская фонетическая школа
Ленинградская фонетическая школа Усиление каменных конструкций. Часть 1
Усиление каменных конструкций. Часть 1 Заболевания сосудов
Заболевания сосудов Управление в сфере антимонопольного и тарифного регулирования
Управление в сфере антимонопольного и тарифного регулирования lection_3_IDO.ppt
lection_3_IDO.ppt Понятие архитектуры ЭВМ и общие механизмы функционирования
Понятие архитектуры ЭВМ и общие механизмы функционирования Принципы организации Прокуратуры Российской Федерации
Принципы организации Прокуратуры Российской Федерации Усеченный инфинитив
Усеченный инфинитив Châteaux de la Loire
Châteaux de la Loire K-P-T vaihtelu Nominityypit Vartalot Harjoitukset (1)
K-P-T vaihtelu Nominityypit Vartalot Harjoitukset (1) Иммунопрофилактика
Иммунопрофилактика Классификация видов искусства
Классификация видов искусства О схемах программ Схема проектирования цикла с помощью инварианта
О схемах программ Схема проектирования цикла с помощью инварианта Экологическая игра « Поле чудес» - презентация для начальной школы_
Экологическая игра « Поле чудес» - презентация для начальной школы_ Lin/ltl 487 second language pedagogy. Week 8
Lin/ltl 487 second language pedagogy. Week 8 Массивы
Массивы Принадлежность точки линии
Принадлежность точки линии Развитие новых технологий XVII-XXI века
Развитие новых технологий XVII-XXI века это вид искусства, в котором художественные образы создаются средствами пластических движений и ритмически четкой и непрерывной
это вид искусства, в котором художественные образы создаются средствами пластических движений и ритмически четкой и непрерывной  Рождество (Christmas). Что такое Рождество?
Рождество (Christmas). Что такое Рождество? ГБ4лечение для ВОГ
ГБ4лечение для ВОГ