- Датчик касания конструктора lego mindstorms ev3

Содержание
- 2. В состав конструктора Lego mindstorms EV3 входят различные датчики. Главная задача датчиков - представлять информацию из
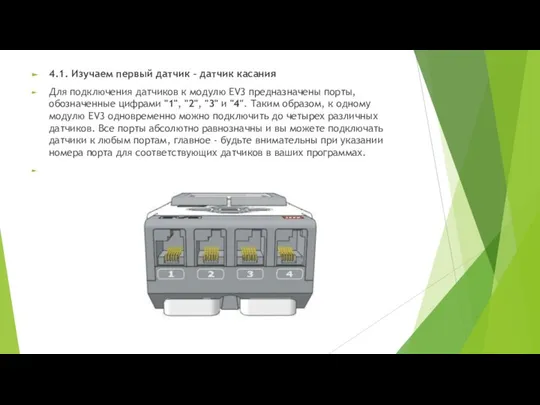
- 4. 4.1. Изучаем первый датчик – датчик касания Для подключения датчиков к модулю EV3 предназначены порты, обозначенные
- 5. Первым датчиком, который мы изучим, будет датчик касания (Рис. 2). Этот датчик, по сути, представляет собой
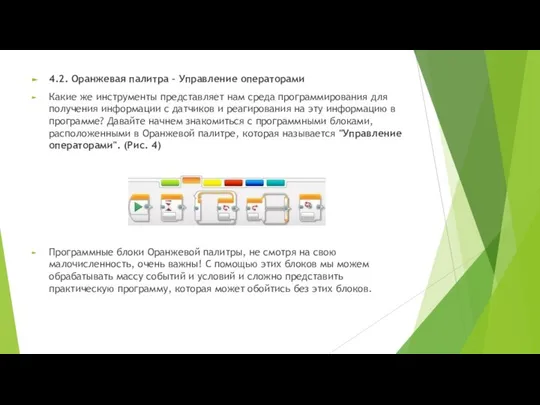
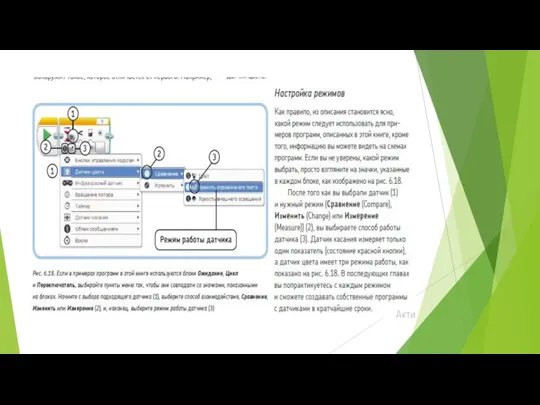
- 6. 4.2. Оранжевая палитра – Управление операторами Какие же инструменты представляет нам среда программирования для получения информации
- 7. С самым первым блоком Оранжевой палитры мы уже с вами знакомы: он называется "Начало". Именно с
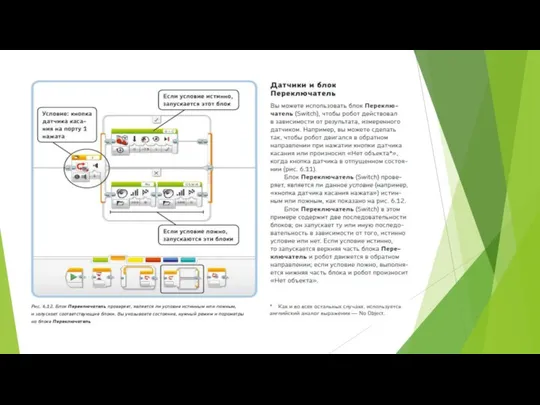
- 8. 4.3. Оранжевая палитра, программный блок "Ожидание" Перед тем, как приступить к решению практических задач, давайте закрепим
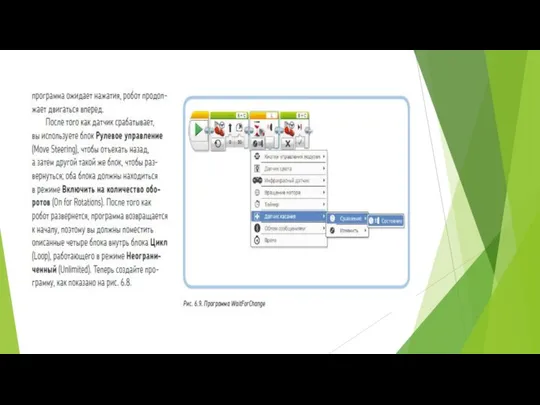
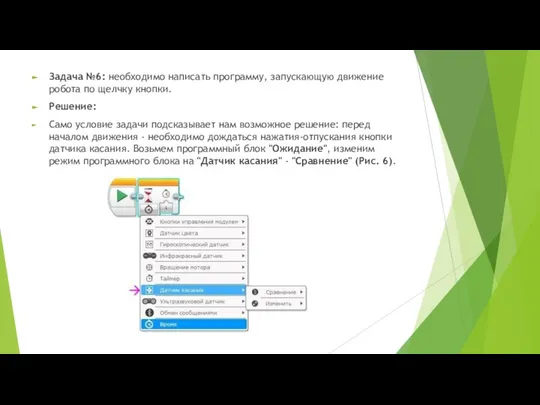
- 28. Задача №6: необходимо написать программу, запускающую движение робота по щелчку кнопки. Решение: Само условие задачи подсказывает
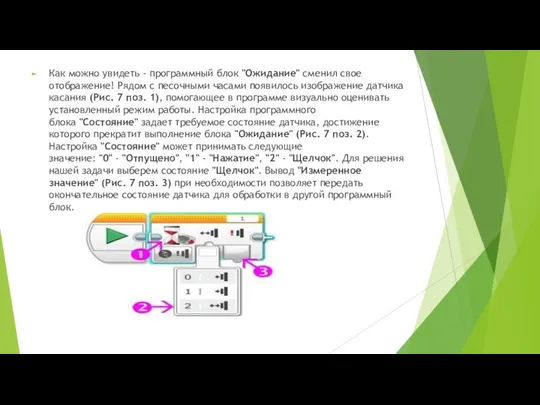
- 29. Как можно увидеть - программный блок "Ожидание" сменил свое отображение! Рядом с песочными часами появилось изображение
- 30. Итак: при такой настройке блока ожидания выполнение нашей программы будет остановлено до нажатия-отпускания кнопки датчика касания.
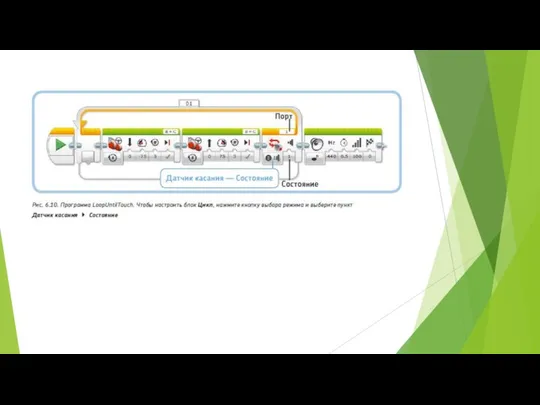
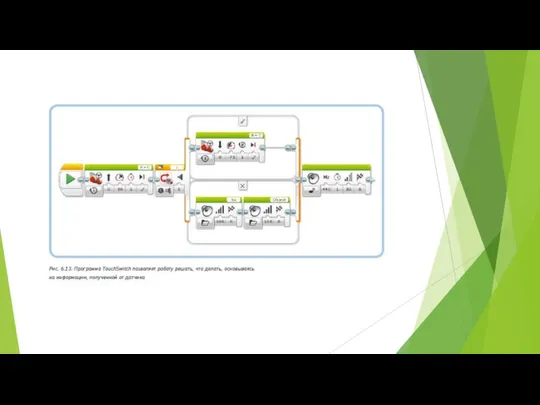
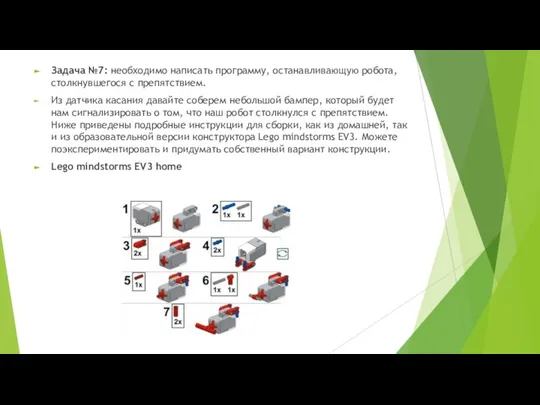
- 31. Задача №7: необходимо написать программу, останавливающую робота, столкнувшегося с препятствием. Из датчика касания давайте соберем небольшой
- 32. Получившийся элемент закрепим на передней балке нашего робота и соединим датчик касания с портом "1" модуля
- 33. Конструкция готова! Приступим к созданию программы. По условию задачи: робот должен двигаться вперед, пока не наткнется
- 35. Скачать презентацию
В состав конструктора Lego mindstorms EV3 входят различные датчики. Главная задача
В состав конструктора Lego mindstorms EV3 входят различные датчики. Главная задача

4.1. Изучаем первый датчик – датчик касания
Для подключения датчиков к модулю
4.1. Изучаем первый датчик – датчик касания
Для подключения датчиков к модулю
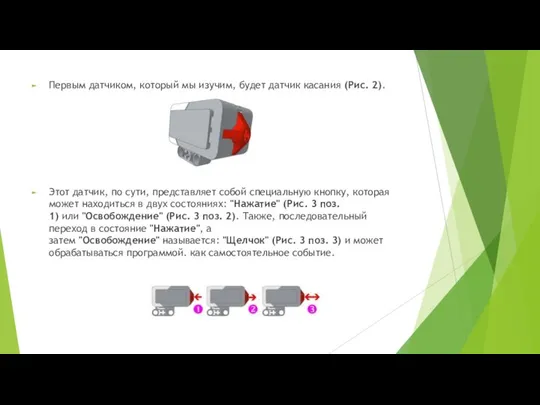
Первым датчиком, который мы изучим, будет датчик касания (Рис. 2).
Этот датчик,
Первым датчиком, который мы изучим, будет датчик касания (Рис. 2).
Этот датчик,
4.2. Оранжевая палитра – Управление операторами
Какие же инструменты представляет нам среда
4.2. Оранжевая палитра – Управление операторами
Какие же инструменты представляет нам среда

С самым первым блоком Оранжевой палитры мы уже с вами знакомы:
С самым первым блоком Оранжевой палитры мы уже с вами знакомы:

4.3. Оранжевая палитра, программный блок "Ожидание"
Перед тем, как приступить к решению
4.3. Оранжевая палитра, программный блок "Ожидание"
Перед тем, как приступить к решению


Задача №6: необходимо написать программу, запускающую движение робота по щелчку кнопки.
Решение:
Само условие
Задача №6: необходимо написать программу, запускающую движение робота по щелчку кнопки.
Решение:
Само условие
Как можно увидеть - программный блок "Ожидание" сменил свое отображение! Рядом с песочными
Как можно увидеть - программный блок "Ожидание" сменил свое отображение! Рядом с песочными

Итак: при такой настройке блока ожидания выполнение нашей программы будет остановлено
Итак: при такой настройке блока ожидания выполнение нашей программы будет остановлено
Задача №7: необходимо написать программу, останавливающую робота, столкнувшегося с препятствием.
Из датчика касания
Задача №7: необходимо написать программу, останавливающую робота, столкнувшегося с препятствием.
Из датчика касания
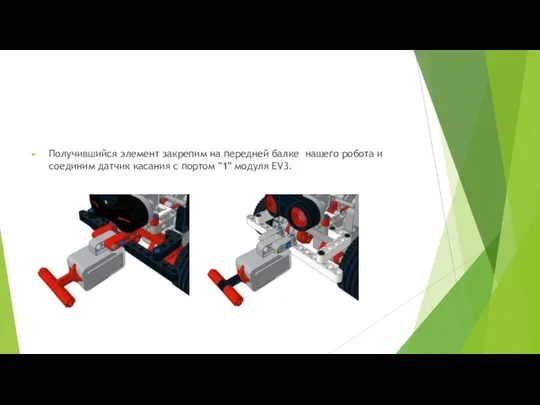
Получившийся элемент закрепим на передней балке нашего робота и соединим датчик
Получившийся элемент закрепим на передней балке нашего робота и соединим датчик
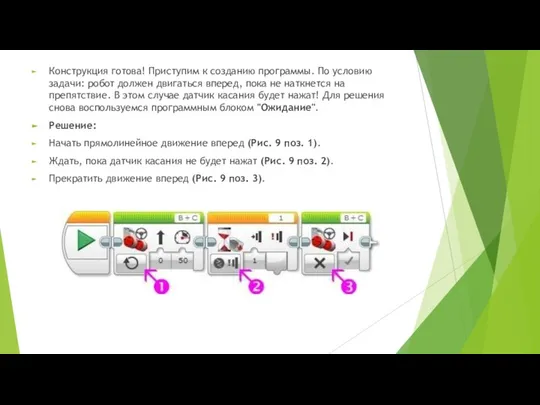
Конструкция готова! Приступим к созданию программы. По условию задачи: робот должен
Конструкция готова! Приступим к созданию программы. По условию задачи: робот должен
 ИМЕЮ ПРАВО…
ИМЕЮ ПРАВО… Кинематика точки
Кинематика точки МИНИМИЗАЦИЯ ПЕРЕКЛЮЧАТЕЛЬНЫХ ФУНКЦИЙ
МИНИМИЗАЦИЯ ПЕРЕКЛЮЧАТЕЛЬНЫХ ФУНКЦИЙ Озеро Акакуль
Озеро Акакуль  Складская логистика. (Тема 8)
Складская логистика. (Тема 8) Основное представление об игре «баскетбол»
Основное представление об игре «баскетбол» Элементарные действия. Алгоритмические структуры
Элементарные действия. Алгоритмические структуры Права потребителей
Права потребителей Холодильники Hair
Холодильники Hair  Поисковые запросы
Поисковые запросы Дадаизм
Дадаизм изменение сроков уплаты в соответствии с налоговым зак-м Терешкова М. Лазарюк А. ДС5 ФТД5
изменение сроков уплаты в соответствии с налоговым зак-м Терешкова М. Лазарюк А. ДС5 ФТД5 ColorBook. Ваши силуэты юбок и брюк
ColorBook. Ваши силуэты юбок и брюк Волшебная сила музыки
Волшебная сила музыки Автобусы. EDC PDE S6
Автобусы. EDC PDE S6 Ауб – икм цифрлық беру жүйелерінің негізгі функционалдық түйіндері
Ауб – икм цифрлық беру жүйелерінің негізгі функционалдық түйіндері Машинаның теңестірілуі
Машинаның теңестірілуі Презентация на тему "ОСНОВЫ ГЕНЕТИКИ ЧЕЛОВЕКА." - скачать презентации по Медицине
Презентация на тему "ОСНОВЫ ГЕНЕТИКИ ЧЕЛОВЕКА." - скачать презентации по Медицине Чистый четверг. День 4. Для малышей. Возраст 2 года – 5 лет
Чистый четверг. День 4. Для малышей. Возраст 2 года – 5 лет Знаки всякие нужны, знаки всякие важны! Кто по улице идет, Тот зовется пешеход. Кто в машине- пассажиры, А водитель их везет.
Знаки всякие нужны, знаки всякие важны! Кто по улице идет, Тот зовется пешеход. Кто в машине- пассажиры, А водитель их везет.  Николай Николаевич Раевский (1771—1829)
Николай Николаевич Раевский (1771—1829) Федерация фитнес-аэробики Иркутской области
Федерация фитнес-аэробики Иркутской области Культурология в системе научного знания
Культурология в системе научного знания ДКБ № 13 им. Н.Ф.Филатова, г.Москва Кафедра детской хирургии РГМУ
ДКБ № 13 им. Н.Ф.Филатова, г.Москва Кафедра детской хирургии РГМУ  Продажа коммерческой недвижимости в ЖК «4 YOU», Московское ш., дом 13, корп. 1, 2
Продажа коммерческой недвижимости в ЖК «4 YOU», Московское ш., дом 13, корп. 1, 2 Методы преобразования ортогональных проекций
Методы преобразования ортогональных проекций  Реализация межсетевого взаимодействия на примере TCP IP
Реализация межсетевого взаимодействия на примере TCP IP ПОНЯТИЕ И ВИДЫ ПРЕСТУПЛЕНИЙ ПРОТИВ ЛИЧНОСТИ. ПРЕСТУПЛЕНИЯ ПРОТИВ ЖИЗНИ И ЗДОРОВЬЯ
ПОНЯТИЕ И ВИДЫ ПРЕСТУПЛЕНИЙ ПРОТИВ ЛИЧНОСТИ. ПРЕСТУПЛЕНИЯ ПРОТИВ ЖИЗНИ И ЗДОРОВЬЯ