- Кинематика точки

Содержание
- 2. 3. УСКОРЕНИЕ ТОЧКИ (ПРОДОЛЖЕНИЕ) 3.6. Определение ускорения при координатном способе задания движения. Случай криволинейных координат. 4.
- 3. 3. УСКОРЕНИЕ ТОЧКИ (ПРОДОЛЖЕНИЕ) Тогда Вычислим проекции вектора ускорения на оси криволинейных координат
- 4. Заметим, что Подставим (1) в (2) (3) Лемма 1. Справедливы равенства
- 5. Для доказательства равенства (5) последовательно вычисляем его левую и правую части Очевидно, что они совпадают. Лемма
- 6. Подставим равенства (4) и (5) в (3). В результате получим Полагаем Легко видеть, что (7) Из
- 7. Пример 2. Вычислить проекции вектора ускорения на оси цилиндрических координат. Решение. Справедливы равенства По формуле (8)
- 8. 4. ЧАСТНЫЕ СЛУЧАИ ДВИЖЕНИЯ ТОЧКИ 4.1. Прямолинейное движение точки. Определение 1. Движение точки называется прямолинейным, если
- 9. Заметим, что В случае прямолинейного движения выполняются равенства
- 10. Пример 3. Равнопеременное движение. Закон равнопеременного движения имеет вид Пример 4. Гармонические колебания. Закон гармонического колебания
- 11. На рисунке изображены направления радиус-вектора точки, векторов скорости и ускорения точки в момент времени Действительно,
- 12. Графическое представление закона движения точки имеет вид
- 13. Дадим определение плоского движения точки. 4.2. Плоское движение точки.
- 14. Таким образом, любое непрямолинейное движение (не обязательно плоское) точки имеет ускорение. При плоском движении точки ее
- 15. При этом косинусы их направляющих углов определяются так Вычислим величину касательного, нормального ускорения и радиус кривизны
- 16. Определение 3. Проекции вектора скорости на оси полярных координат
- 17. Определение 4. Проекции вектора ускорения на оси полярных координат
- 18. Величина касательного ускорения вычисляется по формуле
- 20. Определить , . Решение.
- 22. Скачать презентацию

3. УСКОРЕНИЕ ТОЧКИ (ПРОДОЛЖЕНИЕ)
3.6. Определение ускорения при координатном способе задания
3. УСКОРЕНИЕ ТОЧКИ (ПРОДОЛЖЕНИЕ)
3.6. Определение ускорения при координатном способе задания

3. УСКОРЕНИЕ ТОЧКИ (ПРОДОЛЖЕНИЕ)
Тогда
Вычислим проекции вектора ускорения на оси криволинейных
3. УСКОРЕНИЕ ТОЧКИ (ПРОДОЛЖЕНИЕ)
Тогда
Вычислим проекции вектора ускорения на оси криволинейных
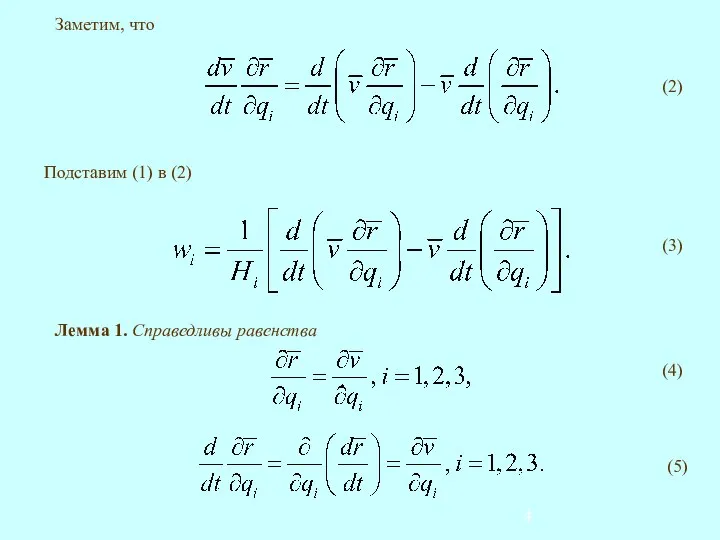
Заметим, что
Подставим (1) в (2)
(3)
Лемма 1. Справедливы равенства
Заметим, что
Подставим (1) в (2)
(3)
Лемма 1. Справедливы равенства
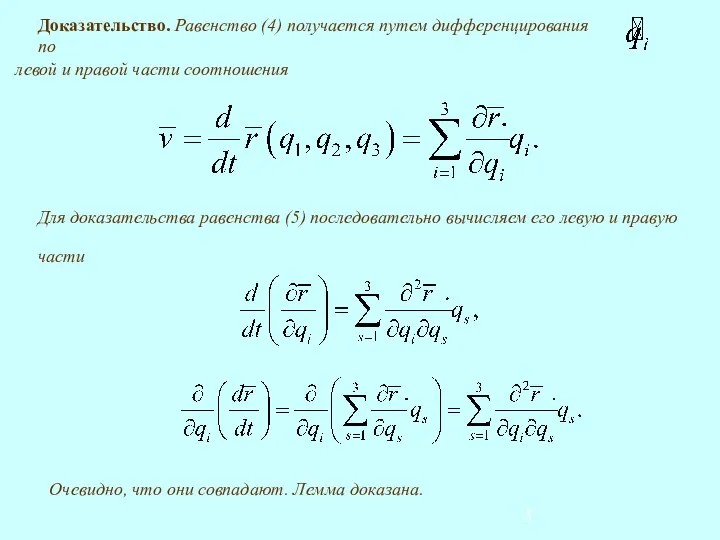
Для доказательства равенства (5) последовательно вычисляем его левую и правую
части
Очевидно,
Для доказательства равенства (5) последовательно вычисляем его левую и правую
части
Очевидно,
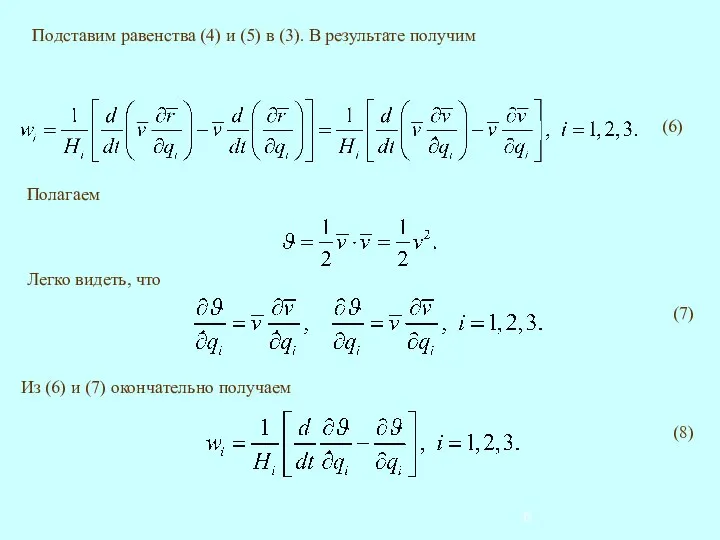
Подставим равенства (4) и (5) в (3). В результате получим
Полагаем
Легко
Подставим равенства (4) и (5) в (3). В результате получим
Полагаем
Легко
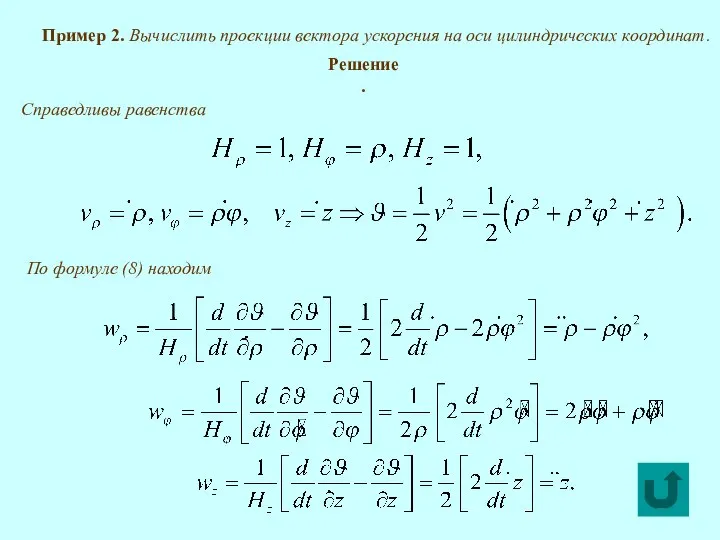
Пример 2. Вычислить проекции вектора ускорения на оси цилиндрических координат.
Решение.
Справедливы
Пример 2. Вычислить проекции вектора ускорения на оси цилиндрических координат.
Решение.
Справедливы
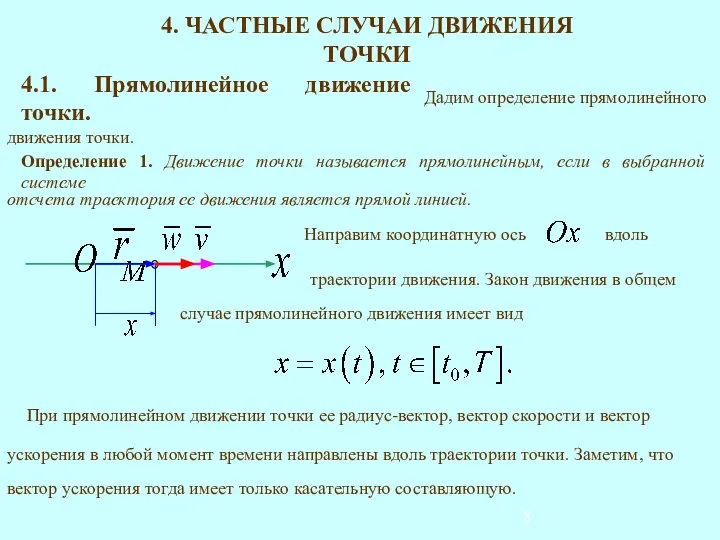
4. ЧАСТНЫЕ СЛУЧАИ ДВИЖЕНИЯ ТОЧКИ
4.1. Прямолинейное движение точки.
Определение 1. Движение
4. ЧАСТНЫЕ СЛУЧАИ ДВИЖЕНИЯ ТОЧКИ
4.1. Прямолинейное движение точки.
Определение 1. Движение
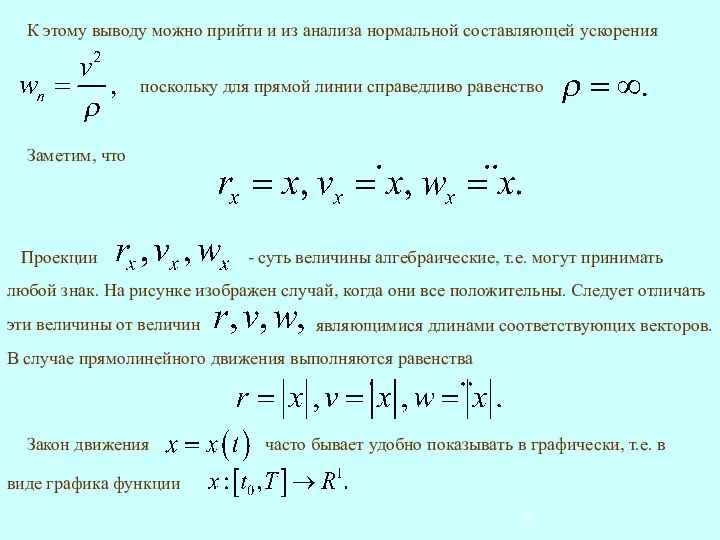
Заметим, что
В случае прямолинейного движения выполняются равенства
Заметим, что
В случае прямолинейного движения выполняются равенства
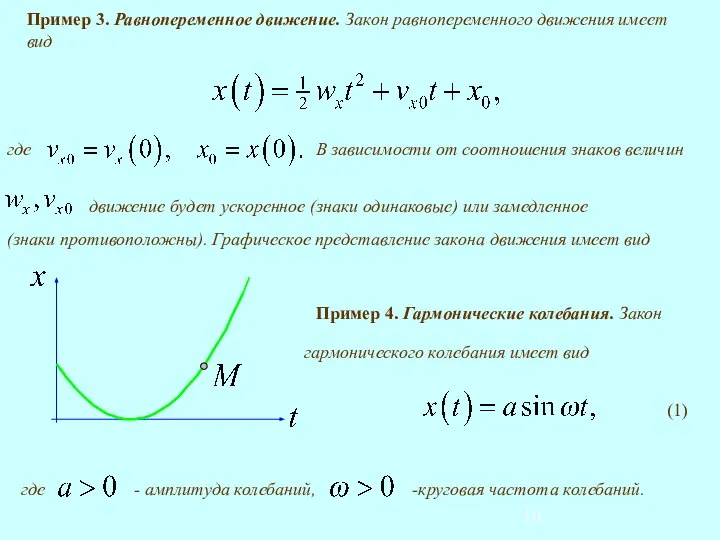
Пример 3. Равнопеременное движение. Закон равнопеременного движения имеет вид
Пример 4. Гармонические
Пример 3. Равнопеременное движение. Закон равнопеременного движения имеет вид
Пример 4. Гармонические

На рисунке изображены направления радиус-вектора точки, векторов скорости и
ускорения точки в
На рисунке изображены направления радиус-вектора точки, векторов скорости и
ускорения точки в
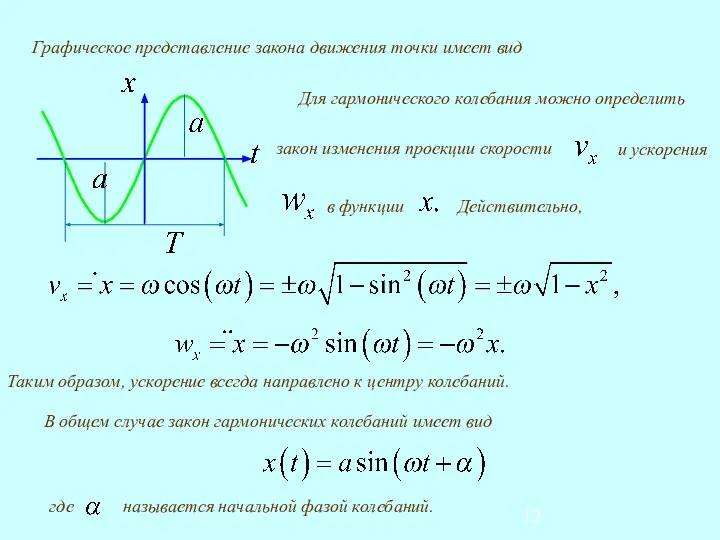
Графическое представление закона движения точки имеет вид
Графическое представление закона движения точки имеет вид
Дадим определение плоского движения точки.
4.2. Плоское движение точки.
Дадим определение плоского движения точки.
4.2. Плоское движение точки.
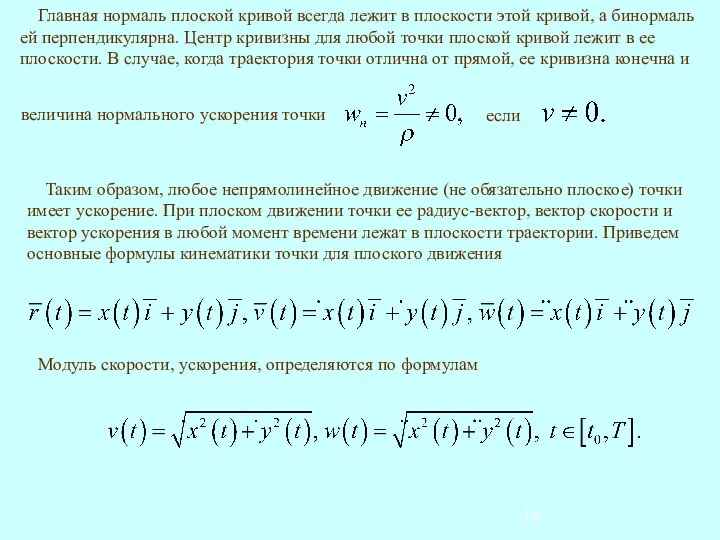
Таким образом, любое непрямолинейное движение (не обязательно плоское) точки
имеет
Таким образом, любое непрямолинейное движение (не обязательно плоское) точки
имеет
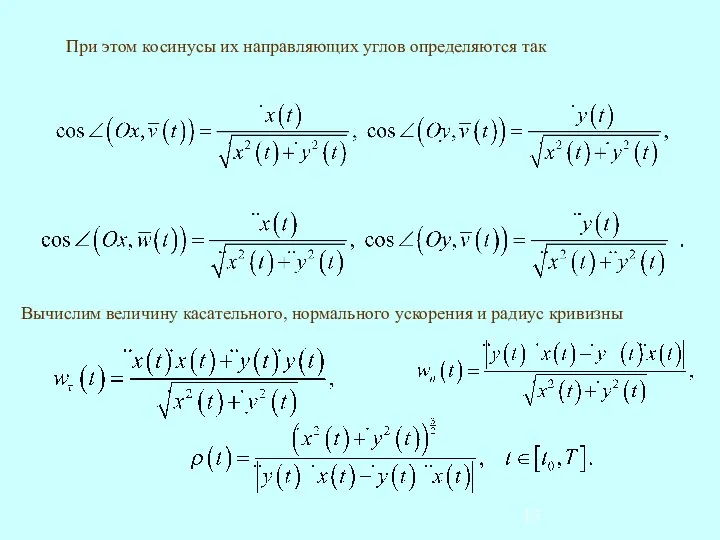
При этом косинусы их направляющих углов определяются так
Вычислим величину касательного,
При этом косинусы их направляющих углов определяются так
Вычислим величину касательного,

Определение 3. Проекции вектора скорости на оси полярных координат
Определение 3. Проекции вектора скорости на оси полярных координат
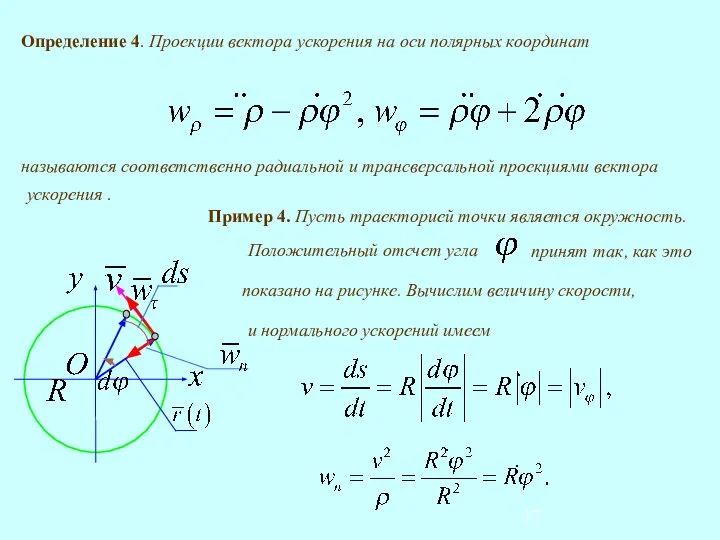
Определение 4. Проекции вектора ускорения на оси полярных координат
Определение 4. Проекции вектора ускорения на оси полярных координат
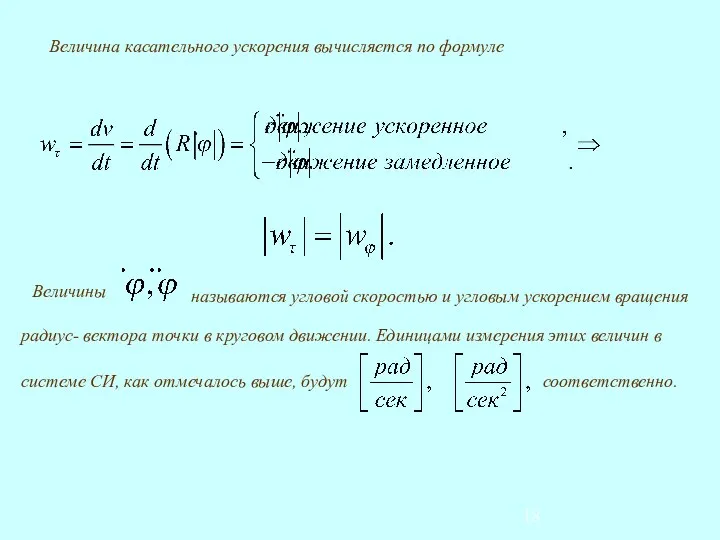
Величина касательного ускорения вычисляется по формуле
Величина касательного ускорения вычисляется по формуле


Определить
,
.
Решение.
Определить
,
.
Решение.
 Классификация схем совмещения литья и прокатки
Классификация схем совмещения литья и прокатки !!! САЙТ выпуск 2019
!!! САЙТ выпуск 2019 Гордость - чувство собственного достоинства
Гордость - чувство собственного достоинства Методы измерения температуры при испытаниях
Методы измерения температуры при испытаниях Маршруты создания ИС. Технология изготовления КМОП схем с p-карманом
Маршруты создания ИС. Технология изготовления КМОП схем с p-карманом Презентация Государственное регулирование внутреннего и внешнего долга
Презентация Государственное регулирование внутреннего и внешнего долга Конструкктор классный уголок
Конструкктор классный уголок Экономические и правовые основы предпринимательства
Экономические и правовые основы предпринимательства  Презентация Привлечение иностранных инвестиций
Презентация Привлечение иностранных инвестиций  Закон о создании дополнительных условий для расселения граждан из жилых помещений в домах, признанных аварийными
Закон о создании дополнительных условий для расселения граждан из жилых помещений в домах, признанных аварийными Политический конфликт
Политический конфликт Deutsche autos
Deutsche autos Стиль богатых девушек. Дресскоды
Стиль богатых девушек. Дресскоды Культура архаической Греции
Культура архаической Греции Свято-Троицкий женский монастырь города Муром
Свято-Троицкий женский монастырь города Муром Ноосфера В.И. Вернадского
Ноосфера В.И. Вернадского наложение ареста на почтово-телеграфные отправления, их осмотр и выемка
наложение ареста на почтово-телеграфные отправления, их осмотр и выемка Przeznaczenie
Przeznaczenie Урок алгебры в 8 классе - презентация по Алгебре
Урок алгебры в 8 классе - презентация по Алгебре Жан Батист Ламарк
Жан Батист Ламарк AutoCAD. Примеры работ. Расписание занятий
AutoCAD. Примеры работ. Расписание занятий Нижегородский Кремль- чудо России!!! Над проектом работали: Башкурова Диана Юрина Екатерина Платонова Анастасия Рылова Анастаси
Нижегородский Кремль- чудо России!!! Над проектом работали: Башкурова Диана Юрина Екатерина Платонова Анастасия Рылова Анастаси Урок2 среды обитания
Урок2 среды обитания Інженерія якості. Ядро професійних знань
Інженерія якості. Ядро професійних знань Макроэкономическое равновесие на товарном рынке. Кейнсианская модель доходов и расходов.
Макроэкономическое равновесие на товарном рынке. Кейнсианская модель доходов и расходов. Искусство Древней Греции Афинский Акрополь
Искусство Древней Греции Афинский Акрополь  Действия над обыкновенными дробями - презентация по Алгебре_
Действия над обыкновенными дробями - презентация по Алгебре_ Геодезист
Геодезист