Електричні виконавчі механізми. Відкрита лекція з дисципліни - Виконавчі механізми та регулюючі органи
- Електричні виконавчі механізми. Відкрита лекція з дисципліни - Виконавчі механізми та регулюючі органи

Содержание
- 2. План 1.1 Виконавчі механізми та регулюючі органи в системах автоматичного регулювання 1.2 Класифікація електричних виконавчих механізмів
- 3. 1.1 Виконавчі механізми та регулюючі органи в системах автоматичного регулювання Розглянемо технологічний агрегат, або процес, у
- 4. Рисунок 1.1 - Структура технологічного агрегату (процесу)
- 5. Зміна кількості палива, яке подається в агрегат, відбувається за допомогою спеціального пристрою, який встановлюється на трубопроводі
- 6. РО, як елемент системи автоматичного регулювання (САР), має теж свою вхідну величину – переміщення затвору Н,
- 7. Рисунок 1.2 - Регулюючий орган, як елемент САР
- 8. Для зручності використовують відносні значення цих величин: відносне переміщення затвору (1.1) відносні витрати (1.2) Як будь-який
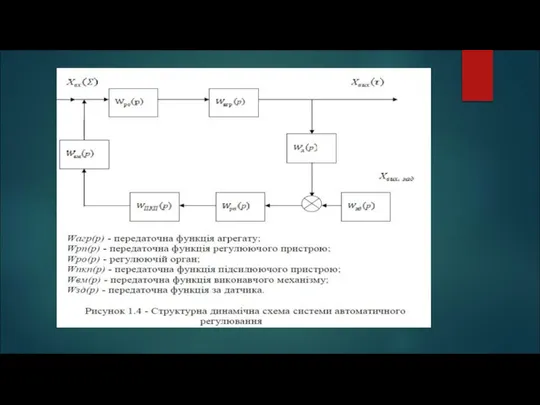
- 9. Розглянемо технічну структуру САР (рис. 1.3), у якій виділені – технологічний агрегат, датчик (Д), порівнюючий елемент,
- 11. Кожен із елементів структури має свій коефіцієнт передачі. Свою статичну характеристику та свою передаточну функцію. Статична
- 12. При аналізі САР структурно агрегат і РО розглядають як їх послідовне з’єднання і об’єднують у один
- 13. З розглянутого матеріалу витікає: ● РО завжди відносять до об’єкту регулювання. ● За допомогою РО можливо
- 14. Як бачимо, РО, як елемент САР, впливає на характеристики і якість роботи системи, а тому вважливо
- 16. Виконавчі механізми, з динамічної точки зору, діляться на два основних класи – астатичні (з передаточною функцією
- 17. Передаточна функція підсилюючого пристрою є передаточною функцією пропорційної ланки, тобто є постійним коефіцієнтом Wпп(р) = Кпп,
- 18. В САР необхідно, щоб автоматичний регулятор формував ПІД-закон регулювання, тобто передаточна функція автоматичного регулятора повинна бути
- 19. Треба знайти передаточну функцію, яку повинен формувати регулюючий пристрій, щоб автоматичний регулятор (сукупність регулюючого та підсилюючого
- 20. Тоді із формули (1.7) маємо: Тобто, якщо виконавчий механізм має передаточну функцію пропорційної ланки, то для
- 21. Другий варіант – виконавчий механізм має передаточну функцію інтегруючої ланки, тобто ( (1.10) З формули (1.7)
- 22. Позначивши сталі величини коефіцієнтами К1, К2, К3, одержуємо закон регулювання, який повинен формувати регулюючий пристрій, щоб
- 23. Як бачимо, регулюючий пристрій повинен формувати ПД – закон регулювання. Таким чином тип ВМ, точніше його
- 24. 1.2 Класифікація електричних виконавчих механізмів Виконавчий механізм (ВМ) – це елемент системи автоматичного регулювання, який призначений
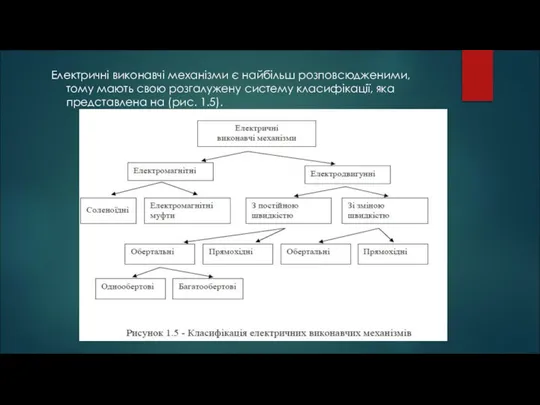
- 25. Електричні виконавчі механізми є найбільш розповсюдженими, тому мають свою розгалужену систему класифікації, яка представлена на (рис.
- 26. В системах автоматичного регулювання використовуються в основному два класи ВМ – механізми з постійною швидкістю та
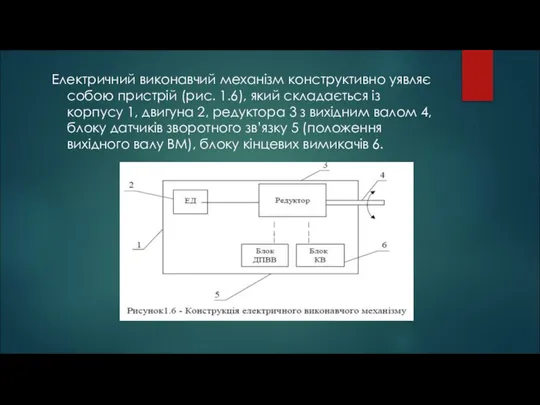
- 27. Електричний виконавчий механізм конструктивно уявляє собою пристрій (рис. 1.6), який складається із корпусу 1, двигуна 2,
- 28. По типу конструкції з’єднання з РО виконавчі механізми можуть бути фланцевими, або важільними. Швидкість переміщення вихідного
- 29. 1.3 Виконавчі механізми зі змінною швидкістю, ПІД-аналогові закони регулювання Електричний виконавчий механізм зі змінною швидкістю переміщення
- 30. 1.3.1 Електричний двигун постійного струму Електричний двигун постійного струму (рис. 1.7) має рухомий ротор з обмоткою
- 32. Для такого двигуна, якщо він є приводом відповідного ВМ, зміна числа n його обертів відбувається шляхом
- 33. 1.3.2 ПІД-аналоговий закон регулювання Як було зазначено вище, ВМ є елементом системи автоматичного регулювання і відноситься
- 34. Це може бути безперервний – аналоговий сигнал на виході модуля аналогового виводу, сформований по ПІД –
- 35. Регулюючий вплив згідно формули (1.12) представляється, як правило, на виході модуля аналогового виводу у формі струмового
- 36. 1.4 Виконавчі механізми сталої швидкості, ПІД-імпульсні закони регулювання Електричні виконавчі механізми сталої швидкості, як і всі
- 37. 1.4.1 Трифазні виконавчі механізми постійної швидкості Трифазний асинхронний двигун має нерухомий статор з трьома обмотками та
- 39. Напруга живлення 380В з частотою 50Гц, яка подається на обмотки статора А, В, С утворює магнітне
- 40. Швидкість n1 для асинхронного двигуна визначається згідно формули: де f– частота змінної напруги живлення (50 Гц);
- 41. Якщо на певний проміжок часу τ подати на обмотки А, В, С статора двигуна аналогічні фази
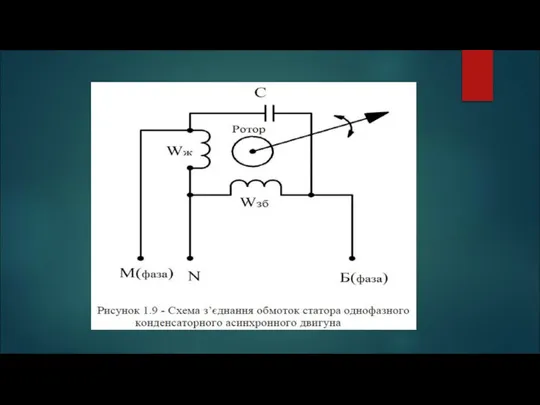
- 42. 1.4.2 Однофазні виконавчі механізми постійної швидкості Однофазний електричний виконавчий механізм має асинхронний конденсаторний двигун з короткозамкненим
- 44. При такому з’єднанні обмоток, в тій обмотці, на яку безпосередньо подається фаза маємо синхронну зміну напруги
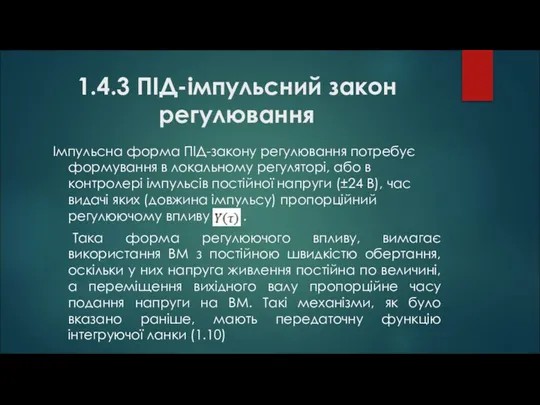
- 45. 1.4.3 ПІД-імпульсний закон регулювання Імпульсна форма ПІД-закону регулювання потребує формування в локальному регуляторі, або в контролері
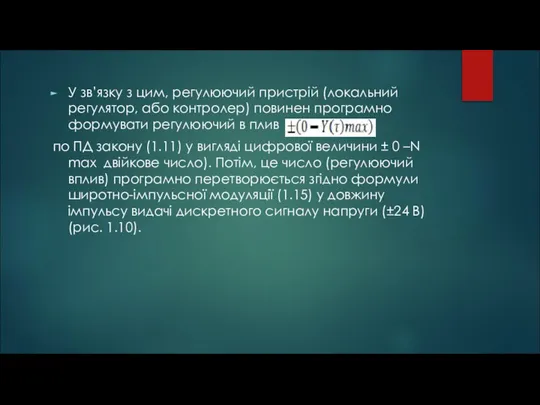
- 46. У зв’язку з цим, регулюючий пристрій (локальний регулятор, або контролер) повинен програмно формувати регулюючий в плив
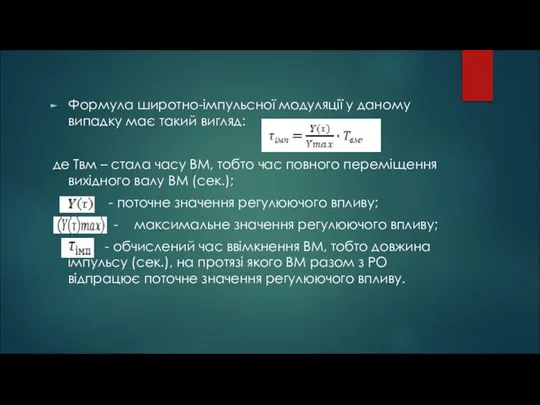
- 48. Формула широтно-імпульсної модуляції у даному випадку має такий вигляд: де Твм – стала часу ВМ, тобто
- 49. Технічно регулюючий вплив по ПІД – імпульсному (широтно-імпульсному) закону реалізується шляхом використання двох дискретних виходів типу
- 50. Рисунок 1.11 - Схема реалізації широтно-імпульсного регулюючого впливу на виході модуля дискретного виводу регулюючого пристрою. Пускач
- 51. 1.5 Одно обертові електричні виконавчі механізми Одно обертові ВМ можуть повертати свій вихідний вал в межах
- 52. 1.5.1 Одно обертові виконавчі механізми типу МЕО Багато фірм випускають виконавчі механізми постійної швидкості. На підприємствах
- 53. Де 1, 2, 3 – клеми живлення 380В; 5, 6, 9, 10 – нормально замкнений (НЗ)
- 54. Клеми 13, 14, 15, 16, 17, 18 – використовуються для датчиків положення вихідного валу ВМ. По
- 55. Однофазний ВМ типу МЕО має аналогічну схему, але напруга живлення приєднується до клем 1, 2, 3
- 56. ВМ типу МЕО мають наступні технічні характеристики – момент на валу М [нм], який характеризує його
- 57. ВМ типу МЕО випускаються з моментами відповідно нормального ряду чисел. Час повного оберту ВМ типу МЕО
- 58. У формулярі вказують: - момент на валу ВМ; - час переміщення вихідного валу; - доля від
- 59. 1. Системы автоматизации технологических процессов. Расчет электрических исполнительных механизмов при проектировании. РМ 4-173-79 : руководящие материалы
- 60. Всі ВМ фірми AUMA уявляють собою модульну конструкцію, яка складається із окремих модулів, комбінуючи які, можливо
- 61. 1.5.2 Виконавчі механізми фірми AUMA При автоматизації технологічних процесів широко використовуються виконавчі механізми фірми AUMA (Німеччина).
- 62. 1.6 Багато обертові електричні виконавчі механізми Багато обертові виконавчі механізми використовуються для керування РО типу заслона,
- 64. Скачать презентацию
План
1.1 Виконавчі механізми та регулюючі органи в системах автоматичного регулювання
1.2 Класифікація електричних виконавчих
План
1.1 Виконавчі механізми та регулюючі органи в системах автоматичного регулювання
1.2 Класифікація електричних виконавчих
1.1 Виконавчі механізми та регулюючі органи в системах автоматичного регулювання
Розглянемо технологічний агрегат,
1.1 Виконавчі механізми та регулюючі органи в системах автоматичного регулювання Розглянемо технологічний агрегат,
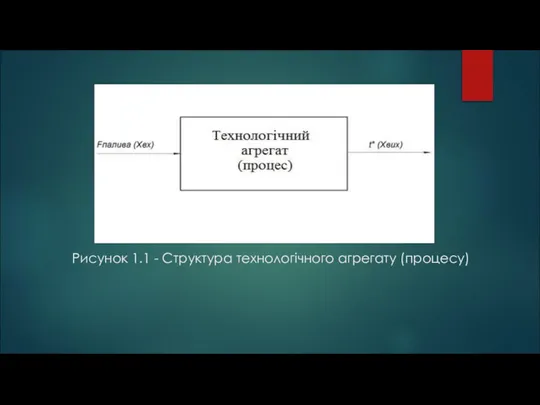
Рисунок 1.1 - Структура технологічного агрегату (процесу)
Рисунок 1.1 - Структура технологічного агрегату (процесу)
Зміна кількості палива, яке подається в агрегат, відбувається за допомогою спеціального
Зміна кількості палива, яке подається в агрегат, відбувається за допомогою спеціального
РО, як елемент системи автоматичного регулювання (САР), має теж свою вхідну
РО, як елемент системи автоматичного регулювання (САР), має теж свою вхідну
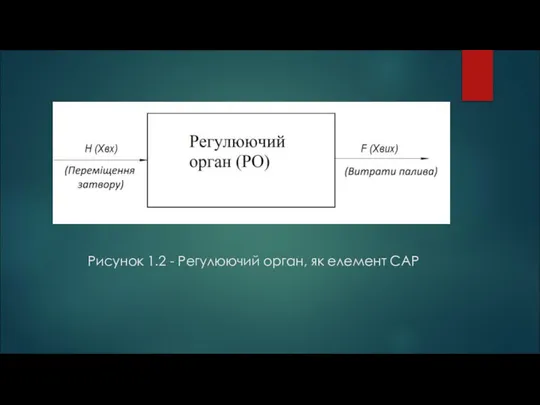
Рисунок 1.2 - Регулюючий орган, як елемент САР
Рисунок 1.2 - Регулюючий орган, як елемент САР
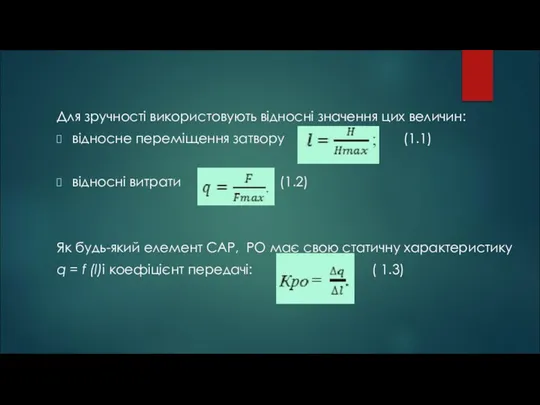
Для зручності використовують відносні значення цих величин:
відносне переміщення затвору (1.1)
відносні
Для зручності використовують відносні значення цих величин:
відносне переміщення затвору (1.1)
відносні
Розглянемо технічну структуру САР (рис. 1.3), у якій виділені – технологічний
Розглянемо технічну структуру САР (рис. 1.3), у якій виділені – технологічний

Кожен із елементів структури має свій коефіцієнт передачі. Свою статичну характеристику
Кожен із елементів структури має свій коефіцієнт передачі. Свою статичну характеристику
При аналізі САР структурно агрегат і РО розглядають як їх послідовне
При аналізі САР структурно агрегат і РО розглядають як їх послідовне
З розглянутого матеріалу витікає:
● РО завжди відносять до об’єкту регулювання.
●
З розглянутого матеріалу витікає:
● РО завжди відносять до об’єкту регулювання.
●
Як бачимо, РО, як елемент САР, впливає на характеристики і якість
Як бачимо, РО, як елемент САР, впливає на характеристики і якість
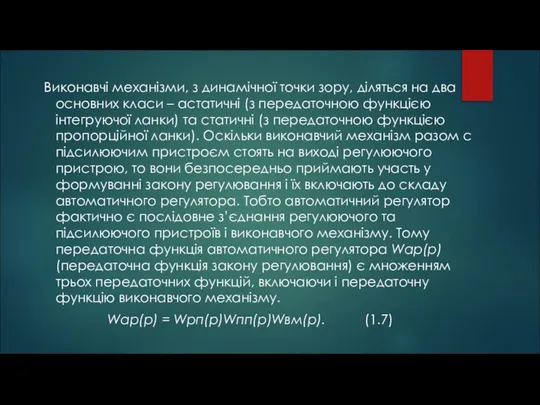
Виконавчі механізми, з динамічної точки зору, діляться на два основних
Виконавчі механізми, з динамічної точки зору, діляться на два основних
Передаточна функція підсилюючого пристрою є передаточною функцією пропорційної ланки, тобто є
Передаточна функція підсилюючого пристрою є передаточною функцією пропорційної ланки, тобто є
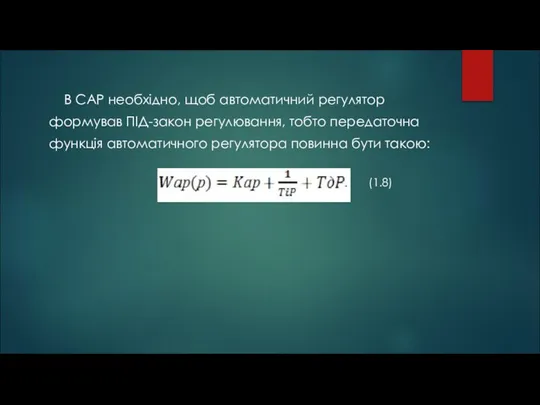
В САР необхідно, щоб автоматичний регулятор
формував ПІД-закон регулювання, тобто передаточна
В САР необхідно, щоб автоматичний регулятор
формував ПІД-закон регулювання, тобто передаточна
Треба знайти передаточну функцію, яку повинен формувати регулюючий пристрій, щоб автоматичний
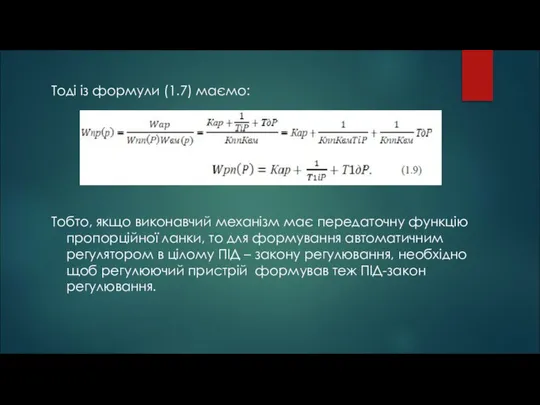
Тоді із формули (1.7) маємо:
Тобто, якщо виконавчий механізм має передаточну функцію
Тоді із формули (1.7) маємо:
Тобто, якщо виконавчий механізм має передаточну функцію
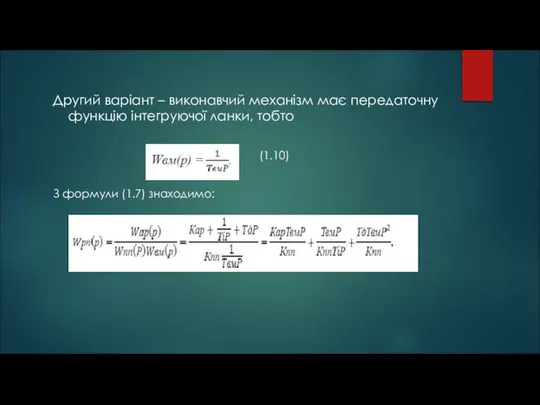
Другий варіант – виконавчий механізм має передаточну функцію інтегруючої ланки, тобто
(
Другий варіант – виконавчий механізм має передаточну функцію інтегруючої ланки, тобто
(
Позначивши сталі величини коефіцієнтами К1, К2, К3, одержуємо закон регулювання, який
Позначивши сталі величини коефіцієнтами К1, К2, К3, одержуємо закон регулювання, який
Як бачимо, регулюючий пристрій повинен формувати ПД – закон регулювання. Таким
Як бачимо, регулюючий пристрій повинен формувати ПД – закон регулювання. Таким
1.2 Класифікація електричних виконавчих механізмів
Виконавчий механізм (ВМ) – це елемент системи автоматичного
1.2 Класифікація електричних виконавчих механізмів
Виконавчий механізм (ВМ) – це елемент системи автоматичного
Електричні виконавчі механізми є найбільш розповсюдженими, тому мають свою розгалужену систему
Електричні виконавчі механізми є найбільш розповсюдженими, тому мають свою розгалужену систему
В системах автоматичного регулювання використовуються в основному два класи ВМ
В системах автоматичного регулювання використовуються в основному два класи ВМ
Електричний виконавчий механізм конструктивно уявляє собою пристрій (рис. 1.6), який складається
Електричний виконавчий механізм конструктивно уявляє собою пристрій (рис. 1.6), який складається
По типу конструкції з’єднання з РО виконавчі механізми можуть бути фланцевими,
По типу конструкції з’єднання з РО виконавчі механізми можуть бути фланцевими,
1.3 Виконавчі механізми зі змінною швидкістю, ПІД-аналогові закони регулювання
Електричний виконавчий механізм зі
1.3 Виконавчі механізми зі змінною швидкістю, ПІД-аналогові закони регулювання
Електричний виконавчий механізм зі
1.3.1 Електричний двигун постійного струму
Електричний двигун постійного струму (рис. 1.7) має рухомий
1.3.1 Електричний двигун постійного струму
Електричний двигун постійного струму (рис. 1.7) має рухомий
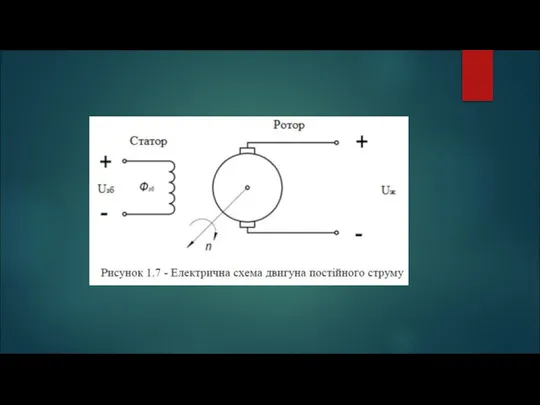
Для такого двигуна, якщо він є приводом відповідного ВМ, зміна числа
Для такого двигуна, якщо він є приводом відповідного ВМ, зміна числа
1.3.2 ПІД-аналоговий закон регулювання
Як було зазначено вище, ВМ є елементом системи автоматичного
1.3.2 ПІД-аналоговий закон регулювання
Як було зазначено вище, ВМ є елементом системи автоматичного
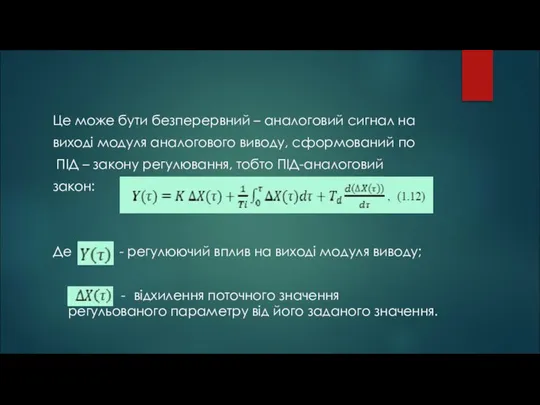
Це може бути безперервний – аналоговий сигнал на
виході модуля аналогового
Це може бути безперервний – аналоговий сигнал на
виході модуля аналогового
Регулюючий вплив згідно формули (1.12) представляється, як правило, на виході модуля
Регулюючий вплив згідно формули (1.12) представляється, як правило, на виході модуля
1.4 Виконавчі механізми сталої швидкості, ПІД-імпульсні закони регулювання
Електричні виконавчі механізми сталої швидкості,
1.4 Виконавчі механізми сталої швидкості, ПІД-імпульсні закони регулювання
Електричні виконавчі механізми сталої швидкості,
1.4.1 Трифазні виконавчі механізми постійної швидкості
Трифазний асинхронний двигун має нерухомий статор з
1.4.1 Трифазні виконавчі механізми постійної швидкості
Трифазний асинхронний двигун має нерухомий статор з

Напруга живлення 380В з частотою 50Гц, яка подається на обмотки статора
Напруга живлення 380В з частотою 50Гц, яка подається на обмотки статора
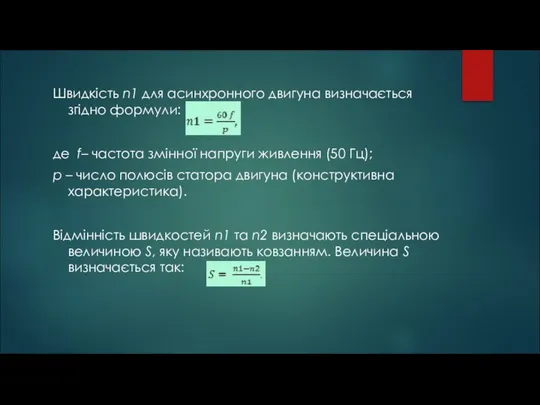
Швидкість n1 для асинхронного двигуна визначається згідно формули:
де f– частота змінної
Швидкість n1 для асинхронного двигуна визначається згідно формули:
де f– частота змінної
Якщо на певний проміжок часу τ подати на обмотки А, В,
1.4.2 Однофазні виконавчі механізми постійної швидкості
Однофазний електричний виконавчий механізм має асинхронний конденсаторний
1.4.2 Однофазні виконавчі механізми постійної швидкості
Однофазний електричний виконавчий механізм має асинхронний конденсаторний
При такому з’єднанні обмоток, в тій обмотці, на яку безпосередньо подається
При такому з’єднанні обмоток, в тій обмотці, на яку безпосередньо подається
1.4.3 ПІД-імпульсний закон регулювання
Імпульсна форма ПІД-закону регулювання потребує формування в локальному регуляторі,
1.4.3 ПІД-імпульсний закон регулювання
Імпульсна форма ПІД-закону регулювання потребує формування в локальному регуляторі,
У зв’язку з цим, регулюючий пристрій (локальний регулятор, або контролер) повинен
У зв’язку з цим, регулюючий пристрій (локальний регулятор, або контролер) повинен

Формула широтно-імпульсної модуляції у даному випадку має такий вигляд:
де Твм – стала
Формула широтно-імпульсної модуляції у даному випадку має такий вигляд:
де Твм – стала
Технічно регулюючий вплив по ПІД – імпульсному (широтно-імпульсному) закону реалізується шляхом
Технічно регулюючий вплив по ПІД – імпульсному (широтно-імпульсному) закону реалізується шляхом
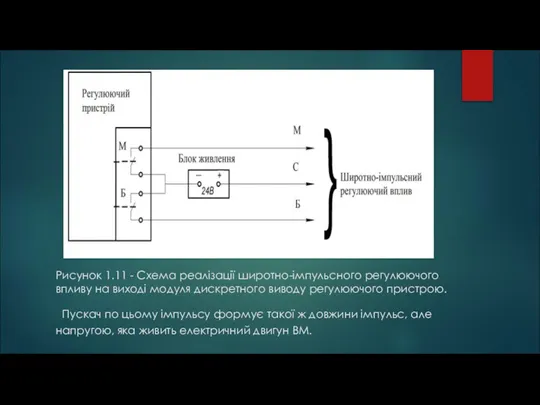
Рисунок 1.11 - Схема реалізації широтно-імпульсного регулюючого впливу на виході модуля
Рисунок 1.11 - Схема реалізації широтно-імпульсного регулюючого впливу на виході модуля
1.5 Одно обертові електричні виконавчі механізми
Одно обертові ВМ можуть повертати свій вихідний
1.5 Одно обертові електричні виконавчі механізми
Одно обертові ВМ можуть повертати свій вихідний
1.5.1 Одно обертові виконавчі механізми типу МЕО
Багато фірм випускають виконавчі механізми постійної
1.5.1 Одно обертові виконавчі механізми типу МЕО
Багато фірм випускають виконавчі механізми постійної
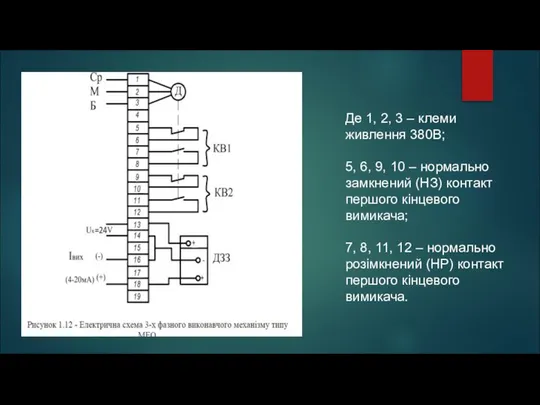
Де 1, 2, 3 – клеми живлення 380В;
5, 6, 9,
Де 1, 2, 3 – клеми живлення 380В;
5, 6, 9,
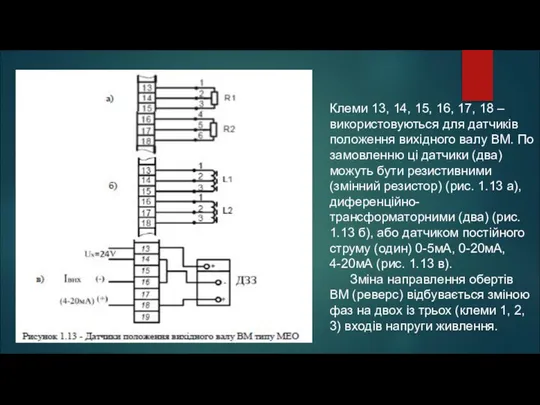
Клеми 13, 14, 15, 16, 17, 18 – використовуються для датчиків
Клеми 13, 14, 15, 16, 17, 18 – використовуються для датчиків
Однофазний ВМ типу МЕО має аналогічну схему, але напруга живлення
Однофазний ВМ типу МЕО має аналогічну схему, але напруга живлення
ВМ типу МЕО мають наступні технічні характеристики – момент на валу
ВМ типу МЕО мають наступні технічні характеристики – момент на валу
ВМ типу МЕО випускаються з моментами відповідно нормального ряду чисел. Час
ВМ типу МЕО випускаються з моментами відповідно нормального ряду чисел. Час
У формулярі вказують:
- момент на валу ВМ;
- час переміщення вихідного валу;
- доля від повного
У формулярі вказують:
- момент на валу ВМ;
- час переміщення вихідного валу;
- доля від повного
1. Системы автоматизации технологических процессов. Расчет электрических исполнительных механизмов при проектировании.
1. Системы автоматизации технологических процессов. Расчет электрических исполнительных механизмов при проектировании.
Всі ВМ фірми AUMA уявляють собою модульну конструкцію, яка складається із
Всі ВМ фірми AUMA уявляють собою модульну конструкцію, яка складається із
1.5.2 Виконавчі механізми фірми AUMA
При автоматизації технологічних процесів широко використовуються виконавчі механізми
1.5.2 Виконавчі механізми фірми AUMA
При автоматизації технологічних процесів широко використовуються виконавчі механізми
1.6 Багато обертові електричні виконавчі механізми
Багато обертові виконавчі механізми використовуються для
1.6 Багато обертові електричні виконавчі механізми
Багато обертові виконавчі механізми використовуються для
 Формула Мора. Правило Верещагина
Формула Мора. Правило Верещагина Санкт-Петербургский государственный медицинский университет имени академика И.П.Павлова Кафедра рентгенологии и радиационно
Санкт-Петербургский государственный медицинский университет имени академика И.П.Павлова Кафедра рентгенологии и радиационно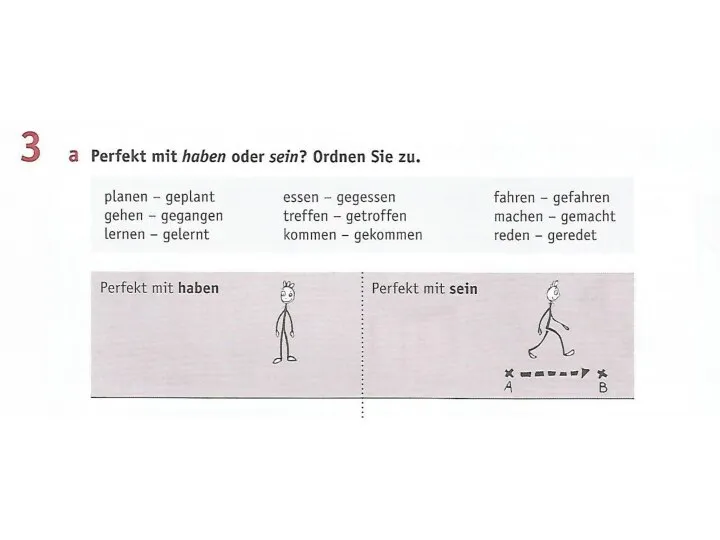 Perfekt mit haben oder sein? Ordnen im Perfekt
Perfekt mit haben oder sein? Ordnen im Perfekt Экономический рост
Экономический рост ПРЕЗЕНТАЦИЯ по дисциплине «Социология» на тему «Теория подражания Г.Тарда» Выполнила: студентка 2 курса ФТД группы Т-1202
ПРЕЗЕНТАЦИЯ по дисциплине «Социология» на тему «Теория подражания Г.Тарда» Выполнила: студентка 2 курса ФТД группы Т-1202 Основы цветоведения
Основы цветоведения Основные направления живописи ХХ века
Основные направления живописи ХХ века  История создания посудомоечной машины
История создания посудомоечной машины Архитектура персонального компьютера
Архитектура персонального компьютера Телефония в СД
Телефония в СД  Эксплуатация ИТ. Корпоративная сеть
Эксплуатация ИТ. Корпоративная сеть Создание таблиц
Создание таблиц  Строительство сельского Дома культуры на 120 мест в с. Старый Город
Строительство сельского Дома культуры на 120 мест в с. Старый Город Объемно-планировочные решения деревянных малоэтажных домов
Объемно-планировочные решения деревянных малоэтажных домов Поджелудочная железа
Поджелудочная железа Как работают Яндекс.Новости Татьяна Исаева
Как работают Яндекс.Новости Татьяна Исаева Урок изобразительного искусства Урок изобразительного искусства во 2 классе
Урок изобразительного искусства Урок изобразительного искусства во 2 классе Северо-Запалный федеральный округ РФ Подготовили студентки группы ДС04 Антохина В., Девяткина И., Коновалова Е., Яковлева М.
Северо-Запалный федеральный округ РФ Подготовили студентки группы ДС04 Антохина В., Девяткина И., Коновалова Е., Яковлева М. Что такое CSS
Что такое CSS ee1fe91c7a304bb38c11a0b32b02a0fe
ee1fe91c7a304bb38c11a0b32b02a0fe Презентация Особенности развития маркетинга в России
Презентация Особенности развития маркетинга в России Культура России в первой половине XIX века
Культура России в первой половине XIX века Поршни. Основные части днища
Поршни. Основные части днища Этапы развития электроники
Этапы развития электроники Интервал в музыке Лоретц Анна Васильевна, учитель начальных классов, МОУ «СОШ №17», г. Краснотурьинск, Свердловская область
Интервал в музыке Лоретц Анна Васильевна, учитель начальных классов, МОУ «СОШ №17», г. Краснотурьинск, Свердловская область Программирование на языке С++. Работа со строками. Функции библиотеки algorithm
Программирование на языке С++. Работа со строками. Функции библиотеки algorithm Устав. Правила (вырезка)
Устав. Правила (вырезка) Сессия 5 Методологии внешней оценки: Совместные оценки коррупции (СОК) в Индонезии Мари Лаберже, ПРООН Центр управления водными рес
Сессия 5 Методологии внешней оценки: Совместные оценки коррупции (СОК) в Индонезии Мари Лаберже, ПРООН Центр управления водными рес