- Кинематика вращательного движения

Содержание
- 2. 3.1. Равномерное вращательное движение
- 8. поскольку скорость направлена по касательной к окружности, а ускорение направлено к её центру; при этом направления
- 9. При рассмотрении свободного падения и баллистичес-кого движения, поскольку в этих случаях постоянно как по величине так
- 10. 3.2. Неравномерное вращательное движение
- 11. Содержание
- 12. Рис.3.5. 3.3. Кинематика вращательного движения тела вокруг оси
- 13. Рис.3.6.
- 15. малые) углы поворота рассматривают как векторы. Модуль вектора равен углу поворота, а его направление совпадает с
- 17. Рис.3.8.
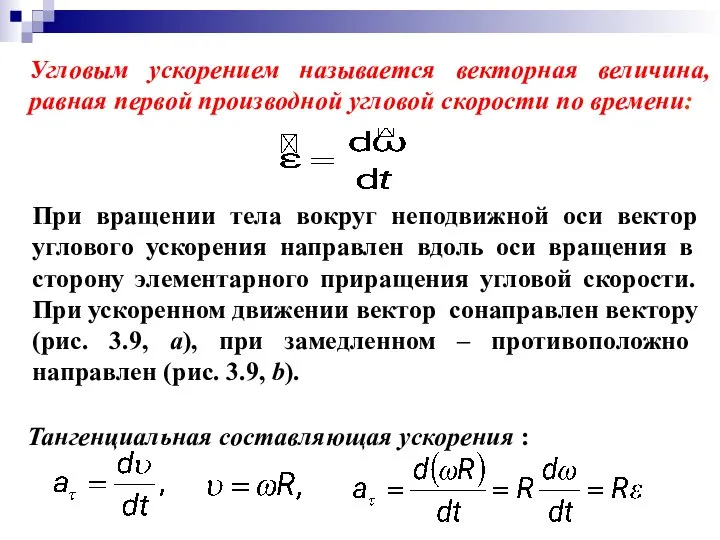
- 18. Рис.3.9.
- 20. В случае равнопеременного движения точки по окружности (ε=const): ω=ω0±εt, φ=ω0t±εt 2/2, где ω0 – начальная угловая
- 22. Скачать презентацию
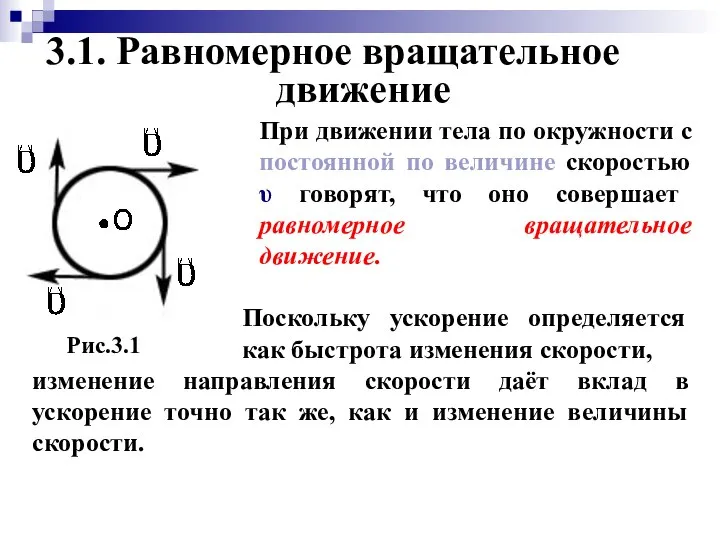
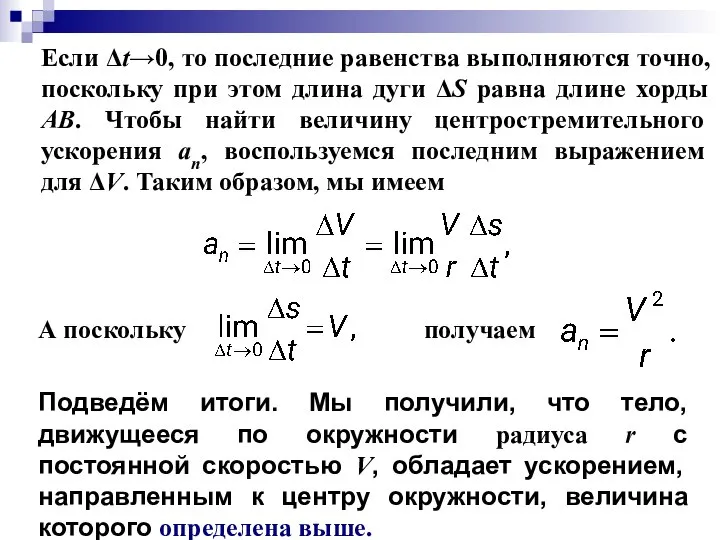
3.1. Равномерное вращательное движение
3.1. Равномерное вращательное движение
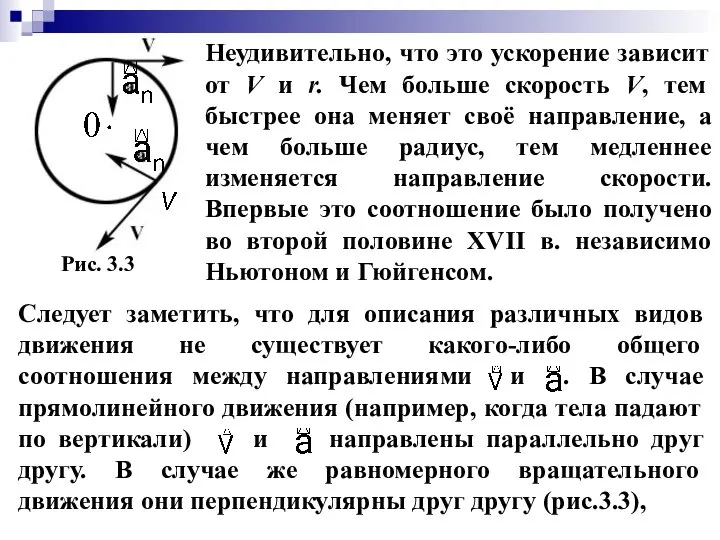
поскольку скорость направлена по касательной к окружности, а ускорение направлено к
поскольку скорость направлена по касательной к окружности, а ускорение направлено к
При рассмотрении свободного падения и баллистичес-кого движения, поскольку в этих случаях
При рассмотрении свободного падения и баллистичес-кого движения, поскольку в этих случаях
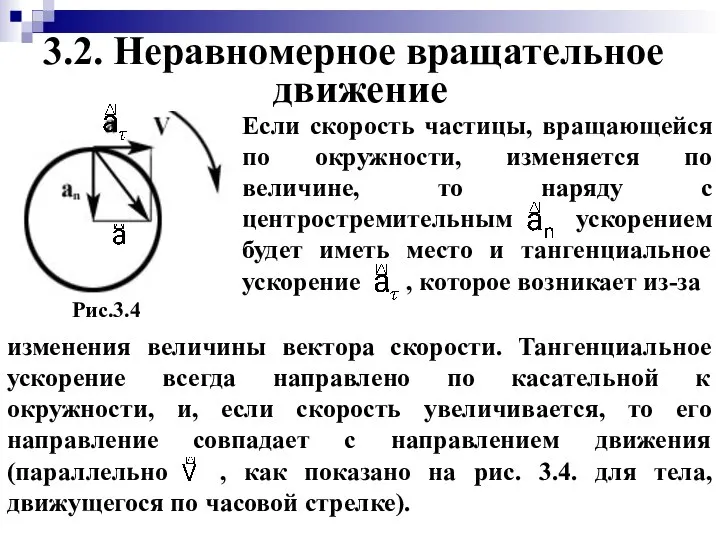
3.2. Неравномерное вращательное движение
3.2. Неравномерное вращательное движение
Содержание
Содержание
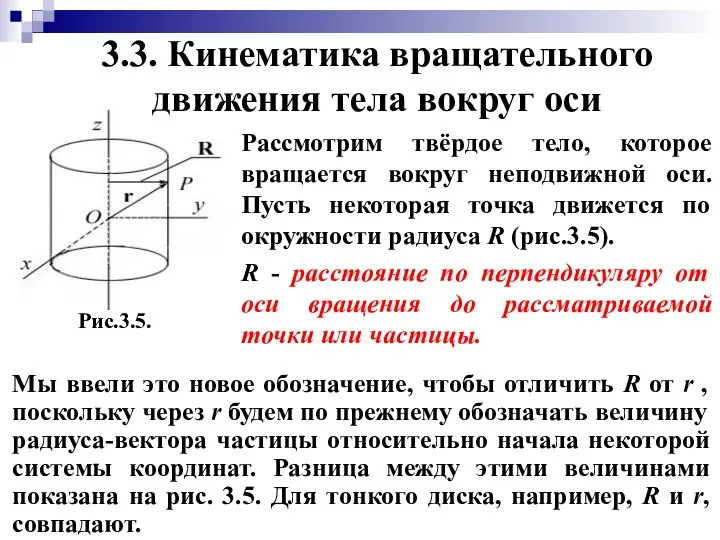
Рис.3.5.
3.3. Кинематика вращательного движения тела вокруг оси
Рис.3.5.
3.3. Кинематика вращательного движения тела вокруг оси
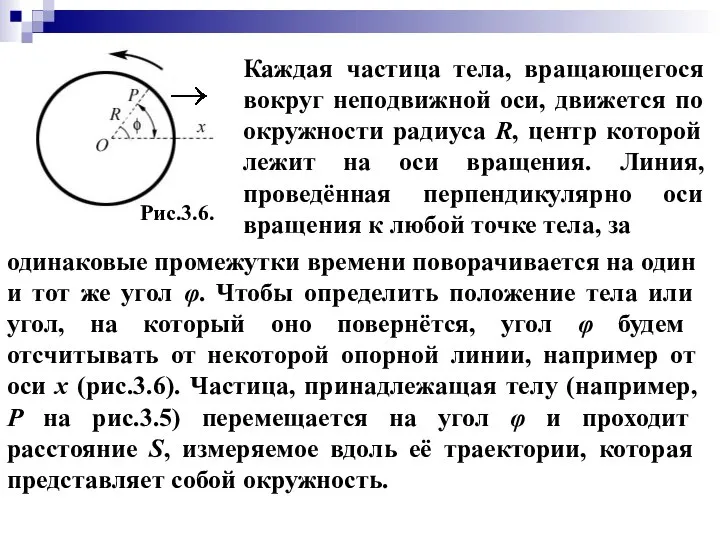
Рис.3.6.
Рис.3.6.
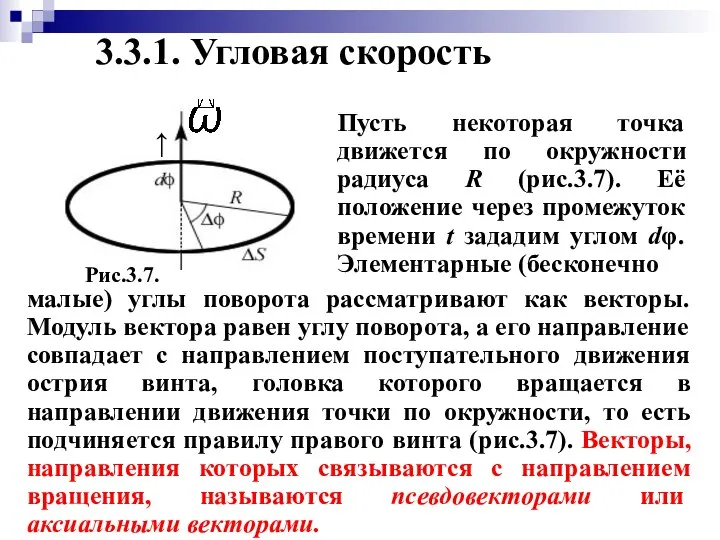
малые) углы поворота рассматривают как векторы. Модуль вектора равен углу поворота,
малые) углы поворота рассматривают как векторы. Модуль вектора равен углу поворота,
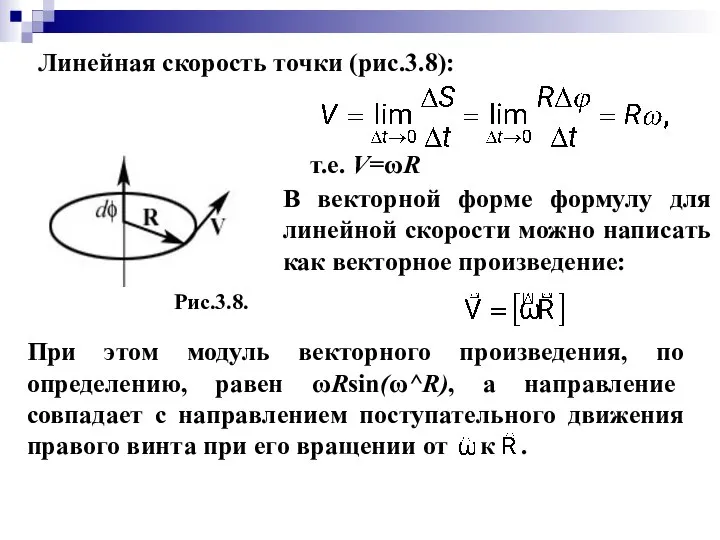
Рис.3.8.
Рис.3.8.
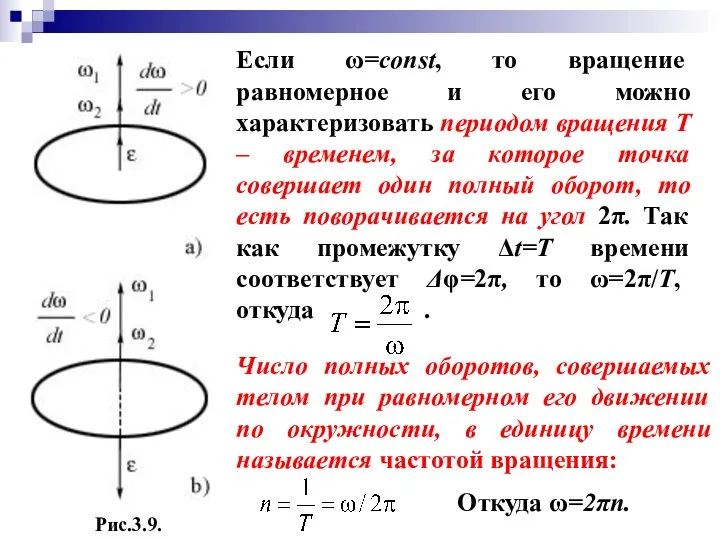
Рис.3.9.
Рис.3.9.
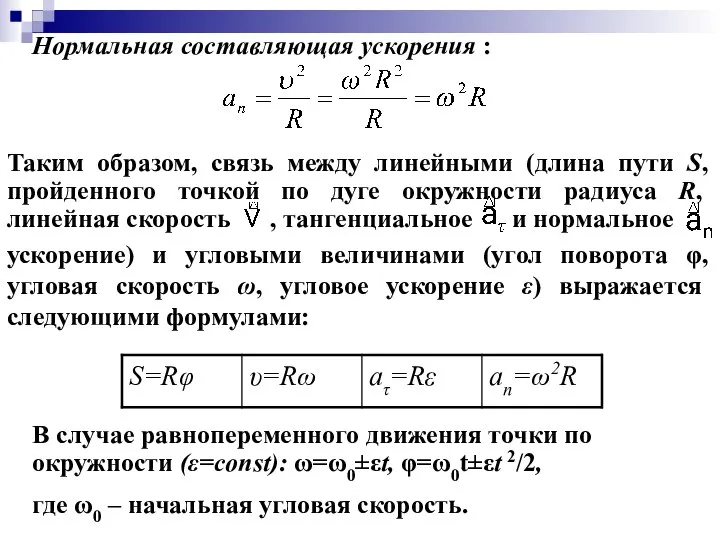
В случае равнопеременного движения точки по окружности (ε=const): ω=ω0±εt, φ=ω0t±εt 2/2,
В случае равнопеременного движения точки по окружности (ε=const): ω=ω0±εt, φ=ω0t±εt 2/2,
 Стиль модерн Подготовил ученик 7А класса Тарасов Евгений Тальменка 2012г.
Стиль модерн Подготовил ученик 7А класса Тарасов Евгений Тальменка 2012г. Субъекты международного таможенного сотрудничества
Субъекты международного таможенного сотрудничества Презентация Таможенное дело в период царствования Елизаветы Петровны
Презентация Таможенное дело в период царствования Елизаветы Петровны Frankfurt
Frankfurt С П О СО Б Ы О Б Р А З О В А Н И Я С У Щ Е С Т В И Т Е Л Ь Н Ы Х
С П О СО Б Ы О Б Р А З О В А Н И Я С У Щ Е С Т В И Т Е Л Ь Н Ы Х Теория железобетона
Теория железобетона Бюджет домохозяйства
Бюджет домохозяйства Подготовка к ЕГЭ по обществознанию. Политические режимы
Подготовка к ЕГЭ по обществознанию. Политические режимы Лингвистический анализ художественного текста как способ формирования языковых комуникативных компетенций учащихся
Лингвистический анализ художественного текста как способ формирования языковых комуникативных компетенций учащихся Презентация "Архитектура древней Греции 4 класс" - скачать презентации по МХК
Презентация "Архитектура древней Греции 4 класс" - скачать презентации по МХК Утилизация отходов – проблема 21 века
Утилизация отходов – проблема 21 века 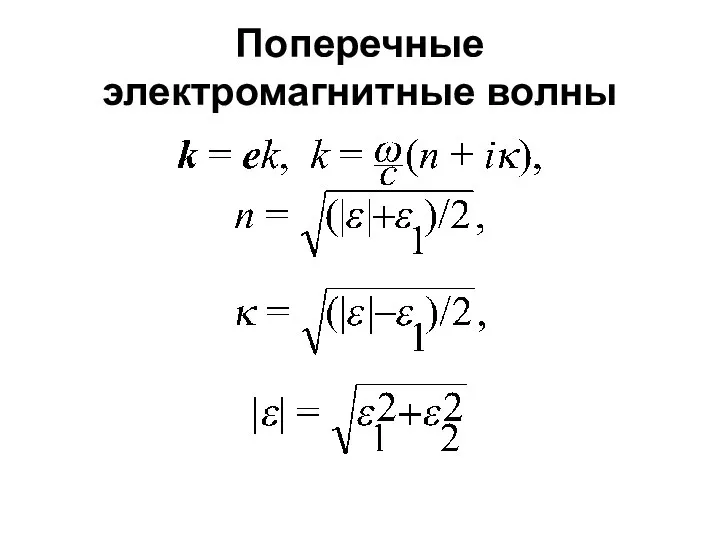 Поперечные электромагнитные волны
Поперечные электромагнитные волны Наследование. Классы в С++
Наследование. Классы в С++ Преобразователь НБ-436В
Преобразователь НБ-436В Система метролоогического обеспечения в Российской Федерации
Система метролоогического обеспечения в Российской Федерации Правоохранительные органы
Правоохранительные органы Новая рекламная кампания «Мы сделаем все сами» ГрузовичкоФ. сделает всё сам
Новая рекламная кампания «Мы сделаем все сами» ГрузовичкоФ. сделает всё сам Формы государственного устройства
Формы государственного устройства Създаване на БЛОГ за нуждите на часовете по чужд език Албена Димитрова Серра, Даниела Александрова и Агапито Флориано Лакайе СЪЗДА
Създаване на БЛОГ за нуждите на часовете по чужд език Албена Димитрова Серра, Даниела Александрова и Агапито Флориано Лакайе СЪЗДА Совершенствование системы оплаты труда персонала организации
Совершенствование системы оплаты труда персонала организации ФИЗИОЛОГИЯ АНАЛИЗАТОРОВ
ФИЗИОЛОГИЯ АНАЛИЗАТОРОВ  Culture shock of Island
Culture shock of Island Создание многофайловых проектов. Их компиляция и сборка. Работа с заголовочными файлами
Создание многофайловых проектов. Их компиляция и сборка. Работа с заголовочными файлами Гаагские конвенции 1899 и 1907 годов: эволюция международного гуманитарного права на случай войны. (анализ документов)
Гаагские конвенции 1899 и 1907 годов: эволюция международного гуманитарного права на случай войны. (анализ документов) Електронні ваги
Електронні ваги Презентация Электронное декларирование
Презентация Электронное декларирование Информационные технологии корпоративных сетей
Информационные технологии корпоративных сетей Теории управления персоналом
Теории управления персоналом