- КЛАССИЧЕСКАЯ ТЕОРИЯ ОПТИМИЗАЦИИ

Содержание
- 2. 10.1. ВВЕДЕНИЕ В классической теории оптимизации для нахождения точек максимума и минимума (экстремальных точек) функций в
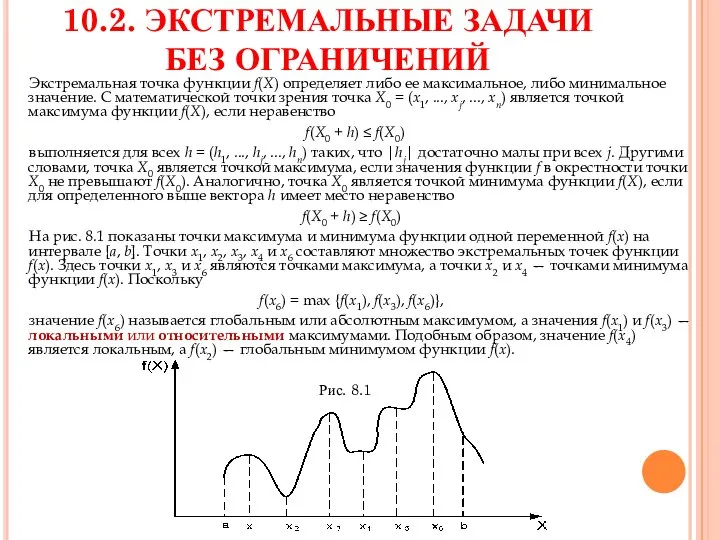
- 3. 10.2. ЭКСТРЕМАЛЬНЫЕ ЗАДАЧИ БЕЗ ОГРАНИЧЕНИЙ Экстремальная точка функции f(X) определяет либо ее максимальное, либо минимальное значение.
- 4. Заметим, что хотя точка х1 является точкой максимума функции f(x) (рис. 8.1), она отличается от остальных
- 5. Теорема 8.2-1. Необходимым условием того, что точка Х0 является экстремальной точкой функции f(X), является равенство ∇f(X0)
- 6. Теорема 8.2-2. Для того чтобы стационарная точка Х0 была экстремальной, достаточно, чтобы матрица Гессе Н в
- 7. Пример 8.2-1 Рассмотрим функцию f(x1, x2, x3) = x1 + 2x3 + x2x3 – x12 –
- 8. Пример 8.2-2 Рассмотрим функцию f(x1, x2) = 8x1x2 + 3x22. необходимые условия экстремума для которой принимают
- 9. Теорема 8.2-3. Если в стационарной точке у0 функции f(y) первые (п – 1) ее производных равны
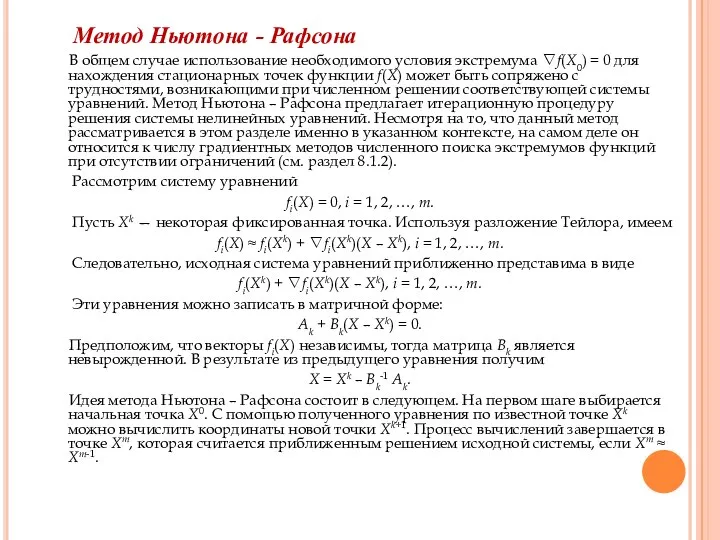
- 10. Метод Ньютона - Рафсона В общем случае использование необходимого условия экстремума ∇f(X0) = 0 для нахождения
- 11. Геометрическая интерпретация данного метода для функции одной переменной f(x) приведена на рис. 8.3. Связь между точками
- 12. 10.3. Задачи на экстремум при наличии ограничений В настоящем разделе рассматриваются задачи поиска экстремумов непрерывных функций
- 13. Для пояснения изложенной идеи рассмотрим функцию f(x1, x2), график которой представлен на рис. 8.4. Предположим, что
- 14. Рис. 8.4 При т > п по меньшей мере т – п уравнений системы являются избыточными.
- 15. Матрица Jm×m называется матрицей Якоби, а Cm×(n–m) — матрицей управления. Матрица Якоби J предполагается невырожденной. Это
- 16. Достаточные условия экстремума в стационарной точке аналогичны изложенным в разделе 8.2. В этом случае элементы матрицы
- 17. Оценка приращения ∂c f окрестности допустимой точки Х0 = (1, 2, 3), вызванного малым изменением ∂x2
- 18. Данный пример иллюстрирует процедуру использования метода приведенного градиента. Рассмотрим задачу Минимизировать f(X) = x12 + x22
- 19. Далее устанавливаем тип полученной стационарной точки путем проверки выполнения достаточных условий экстремума. Так как x3 —
- 20. Использование описанного метода Якоби в общем случае может быть затруднено вычислением обратной матрицы J–1, если количество
- 21. Следовательно, необходимые условия экстремума принимают вид Аналогично в матричном равенстве (i, j) – й элемент вычисляется
- 22. Анализ чувствительности с помощью метода Якоби. Метод Якоби можно использовать для анализа чувствительности оптимального значения целевой
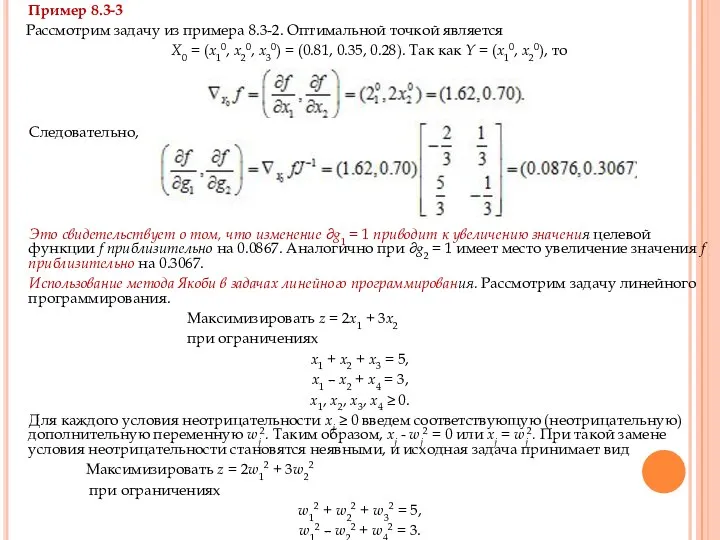
- 23. Пример 8.3-3 Рассмотрим задачу из примера 8.3-2. Оптимальной точкой является X0 = (x10, x20, x30) =
- 24. Это свидетельствует о том, что изменение ∂g1 = 1 приводит к увеличению значения целевой функции f
- 25. Решение системы уравнений, состоящей из уравнения ∇c f и ограничений задачи, позволяет определить стационарную точку w1
- 26. Полученный результат можно проверить графически, используя рис. 8.5. Первое из найденных решений (х1 = 4, х2
- 27. В точке (3, 0) целевая функция двойственной задачи равна 5u1 + 3u2 = 15 совпадает с
- 28. МЕТОД МНОЖИТЕЛЕЙ ЛАГРАНЖА. Коэффициенты чувствительности метода Якоби можно использовать для решения задач с ограничениями в виде
- 29. Уравнения дают необходимые условия для определения стационарных точек функции f(X) при ограничениях g(X) = 0. Достаточные
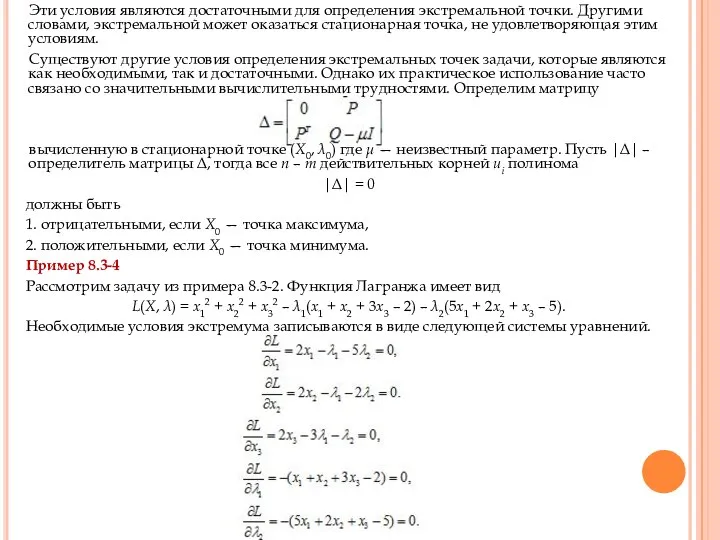
- 30. Эти условия являются достаточными для определения экстремальной точки. Другими словами, экстремальной может оказаться стационарная точка, не
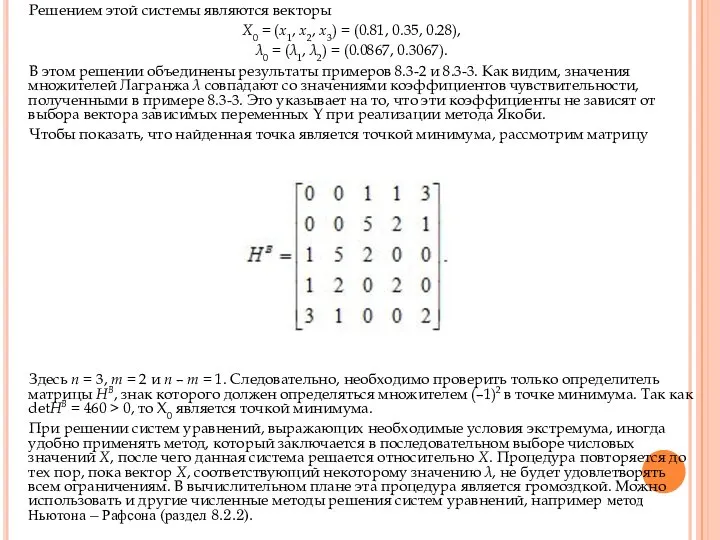
- 31. Решением этой системы являются векторы Х0 = (x1, x2, x3) = (0.81, 0.35, 0.28), λ0 =
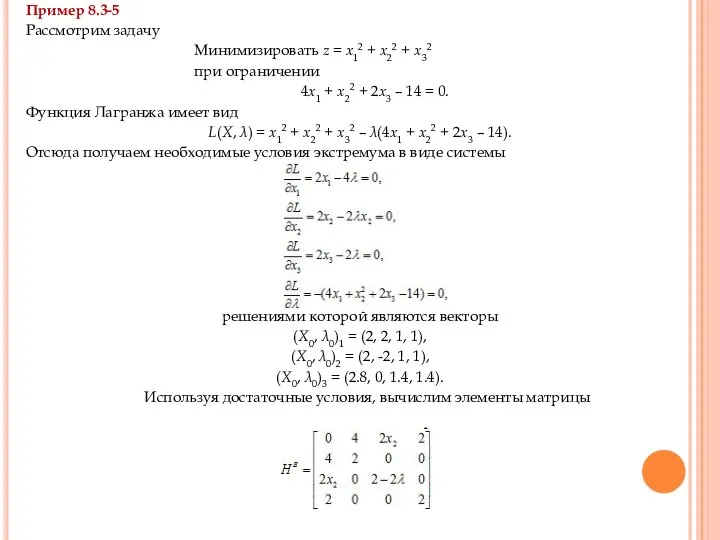
- 32. Пример 8.3-5 Рассмотрим задачу Минимизировать z = x12 + x22 + x32 при ограничении 4x1 +
- 33. Так как т = 1 и п = 3, то для того, чтобы стационарная точка была
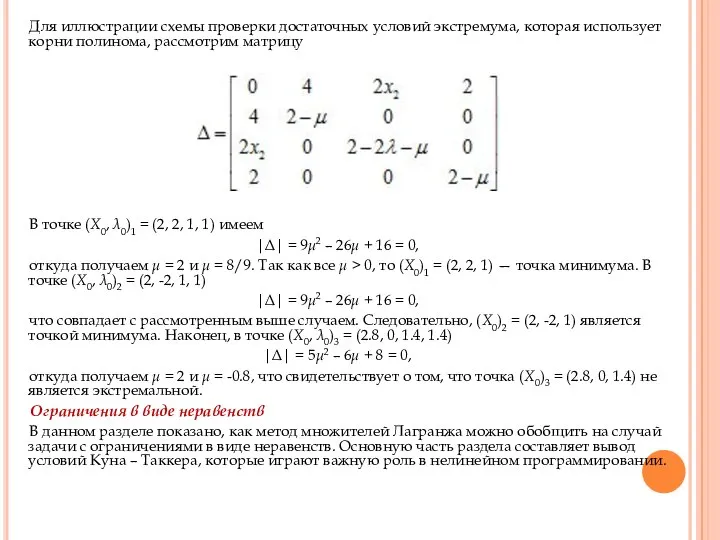
- 34. Для иллюстрации схемы проверки достаточных условий экстремума, которая использует корни полинома, рассмотрим матрицу В точке (Х0,
- 35. ОБОБЩЕННЫЙ МЕТОД МНОЖИТЕЛЕЙ ЛАГРАНЖА Предположим, что дана задача, в которой требуется Максимизировать z = f(X) при
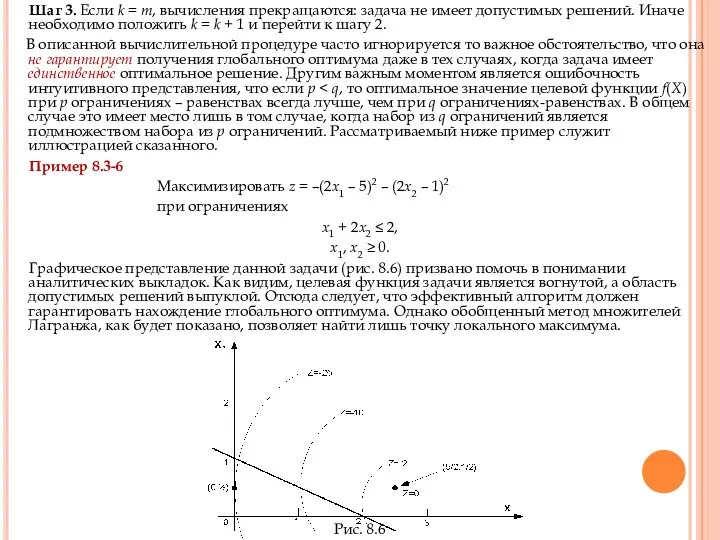
- 36. Шаг 3. Если k = т, вычисления прекращаются: задача не имеет допустимых решений. Иначе необходимо положить
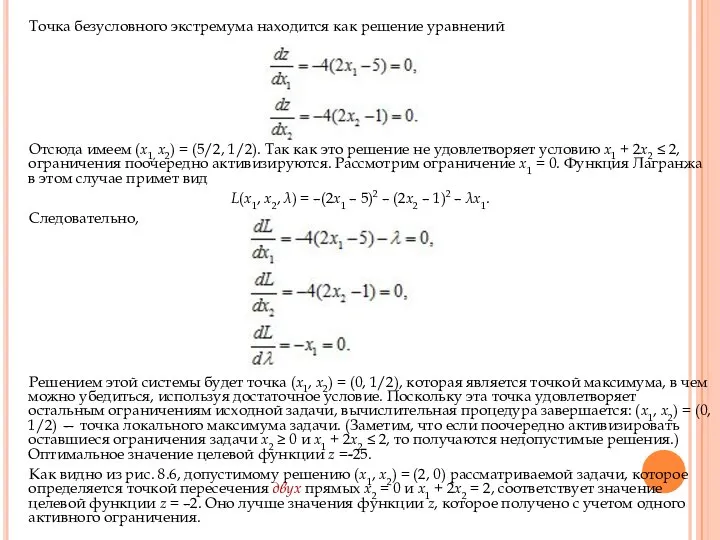
- 37. Точка безусловного экстремума находится как решение уравнений Отсюда имеем (x1, х2) = (5/2, 1/2). Так как
- 38. Как следует из описанной вычислительной процедуры, при реализации обобщенного метода множителей Лагранжа на большее, чем получение
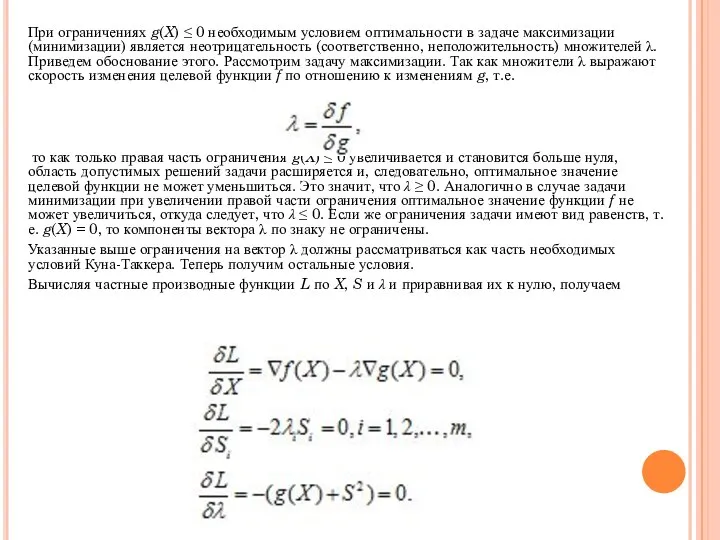
- 39. При ограничениях g(X) ≤ 0 необходимым условием оптимальности в задаче максимизации (минимизации) является неотрицательность (соответственно, неположительность)
- 40. Из второй группы уравнений следуют такие результаты. 1. Если λi не равняется нулю, то Si2 =
- 41. Процедура проверки выпуклости или вогнутости некоторой функции является более простой, чем доказательство выпуклости множества допустимых решений
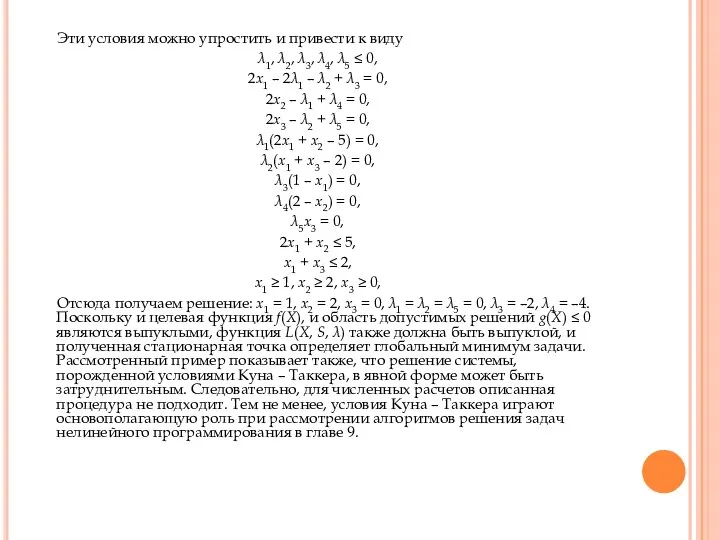
- 42. Пример 8.3-7 Рассмотрим следующую задачу. Минимизировать f(X) = x12 + x22 + x32 при ограничениях g1(X)
- 43. Эти условия можно упростить и привести к виду λ1, λ2, λ3, λ4, λ5 ≤ 0, 2x1
- 45. Скачать презентацию
10.1. ВВЕДЕНИЕ
В классической теории оптимизации для нахождения точек максимума и
10.1. ВВЕДЕНИЕ
В классической теории оптимизации для нахождения точек максимума и
10.2. ЭКСТРЕМАЛЬНЫЕ ЗАДАЧИ БЕЗ ОГРАНИЧЕНИЙ
Экстремальная точка функции f(X) определяет либо
10.2. ЭКСТРЕМАЛЬНЫЕ ЗАДАЧИ БЕЗ ОГРАНИЧЕНИЙ
Экстремальная точка функции f(X) определяет либо
Заметим, что хотя точка х1 является точкой максимума функции f(x)
Заметим, что хотя точка х1 является точкой максимума функции f(x)
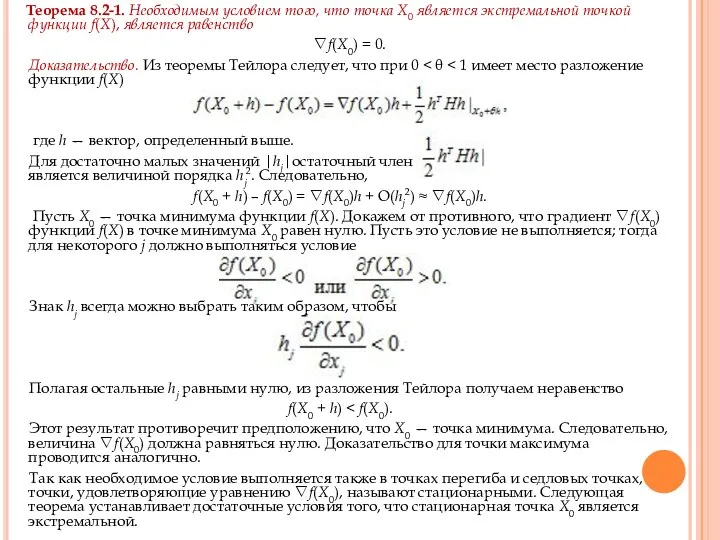
Теорема 8.2-1. Необходимым условием того, что точка Х0 является экстремальной
Теорема 8.2-1. Необходимым условием того, что точка Х0 является экстремальной
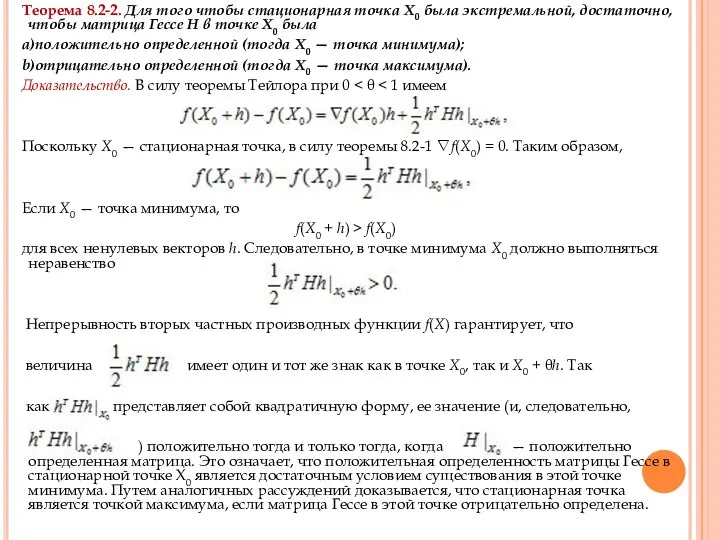
Теорема 8.2-2. Для того чтобы стационарная точка Х0 была экстремальной,
Теорема 8.2-2. Для того чтобы стационарная точка Х0 была экстремальной,
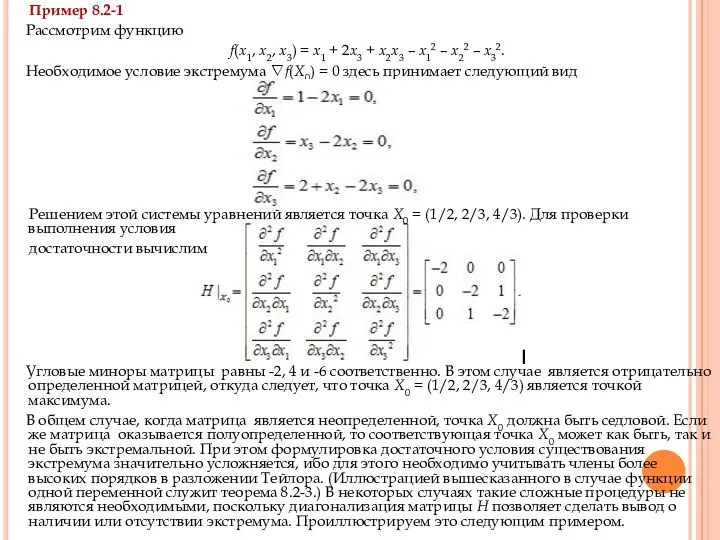
Пример 8.2-1
Рассмотрим функцию
f(x1, x2, x3) = x1 +
Пример 8.2-1
Рассмотрим функцию
f(x1, x2, x3) = x1 +
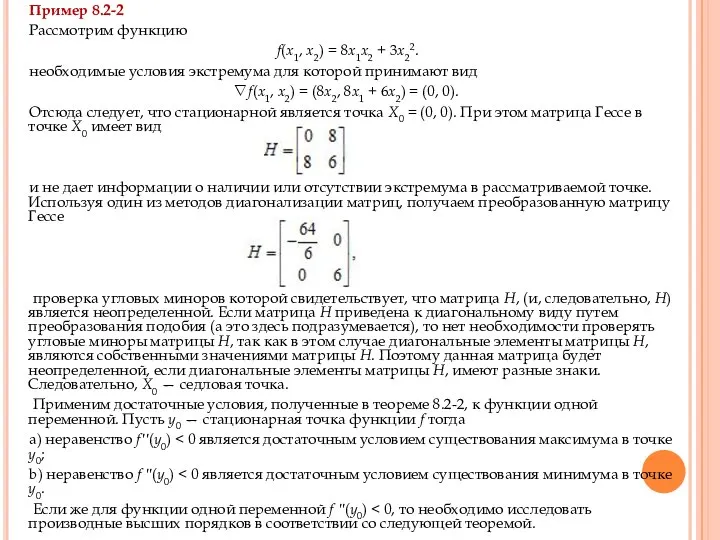
Пример 8.2-2
Рассмотрим функцию
f(x1, x2) = 8x1x2 + 3x22.
Пример 8.2-2
Рассмотрим функцию
f(x1, x2) = 8x1x2 + 3x22.
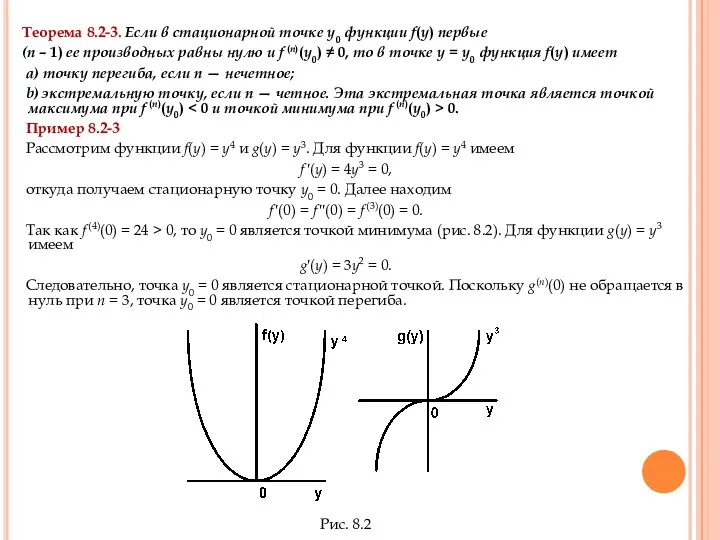
Теорема 8.2-3. Если в стационарной точке у0 функции f(y) первые
Теорема 8.2-3. Если в стационарной точке у0 функции f(y) первые
Метод Ньютона - Рафсона
В общем случае использование необходимого условия
Метод Ньютона - Рафсона
В общем случае использование необходимого условия
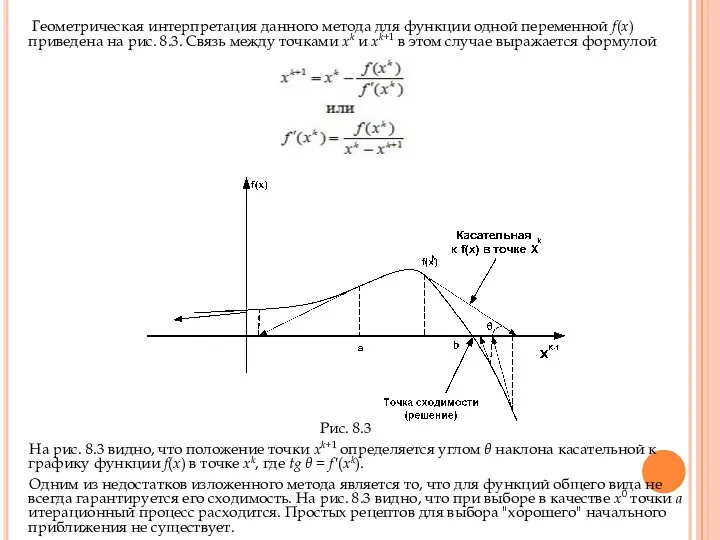
Геометрическая интерпретация данного метода для функции одной переменной f(x) приведена
Геометрическая интерпретация данного метода для функции одной переменной f(x) приведена
10.3. Задачи на экстремум при наличии ограничений
В настоящем разделе рассматриваются
10.3. Задачи на экстремум при наличии ограничений
В настоящем разделе рассматриваются
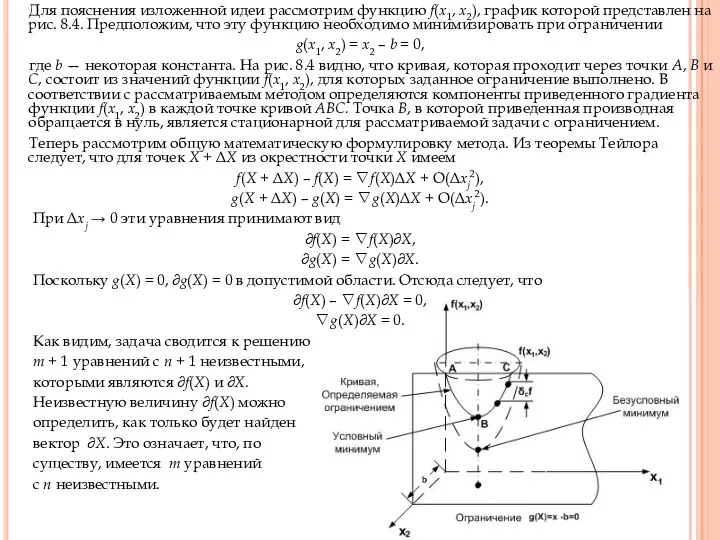
Для пояснения изложенной идеи рассмотрим функцию f(x1, x2), график которой
Для пояснения изложенной идеи рассмотрим функцию f(x1, x2), график которой
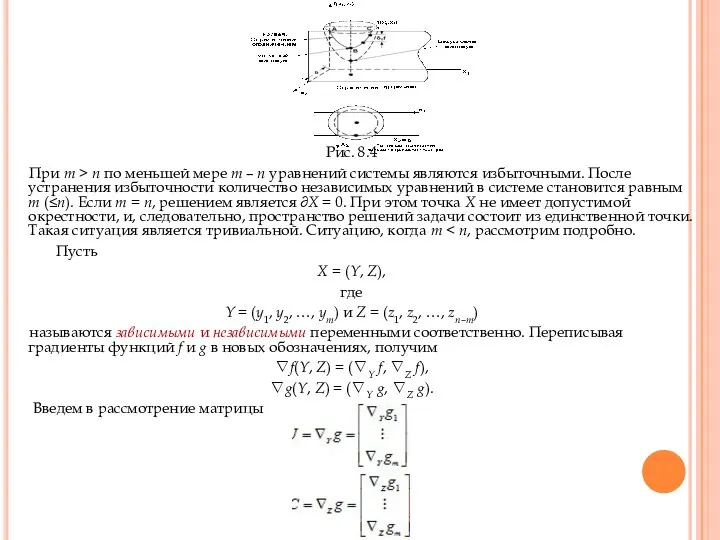
Рис. 8.4
При т > п по меньшей мере т –
Рис. 8.4
При т > п по меньшей мере т –
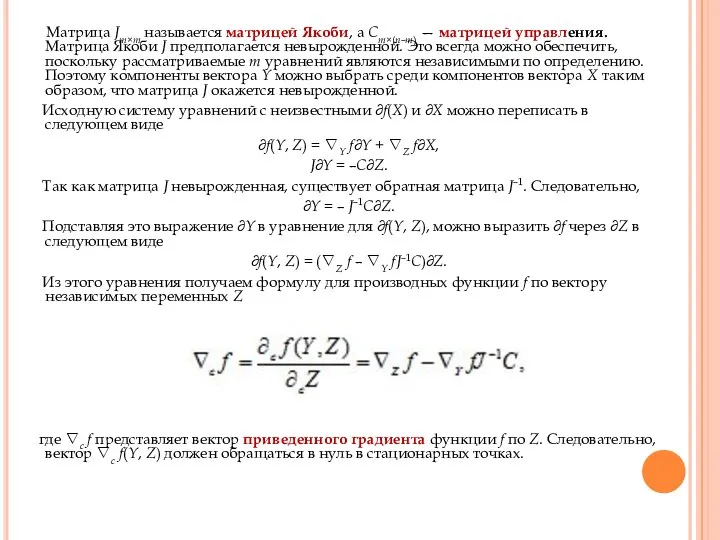
Матрица Jm×m называется матрицей Якоби, а Cm×(n–m) — матрицей управления.
Матрица Jm×m называется матрицей Якоби, а Cm×(n–m) — матрицей управления.
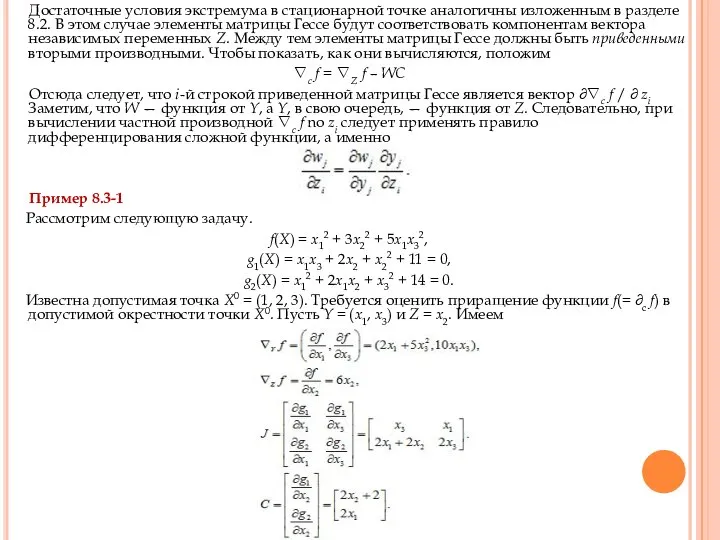
Достаточные условия экстремума в стационарной точке аналогичны изложенным в разделе
Достаточные условия экстремума в стационарной точке аналогичны изложенным в разделе
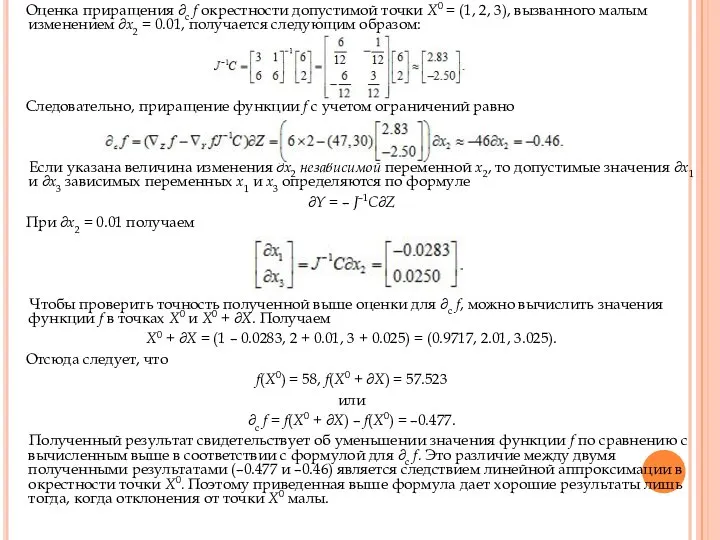
Оценка приращения ∂c f окрестности допустимой точки Х0 = (1, 2,
Оценка приращения ∂c f окрестности допустимой точки Х0 = (1, 2,
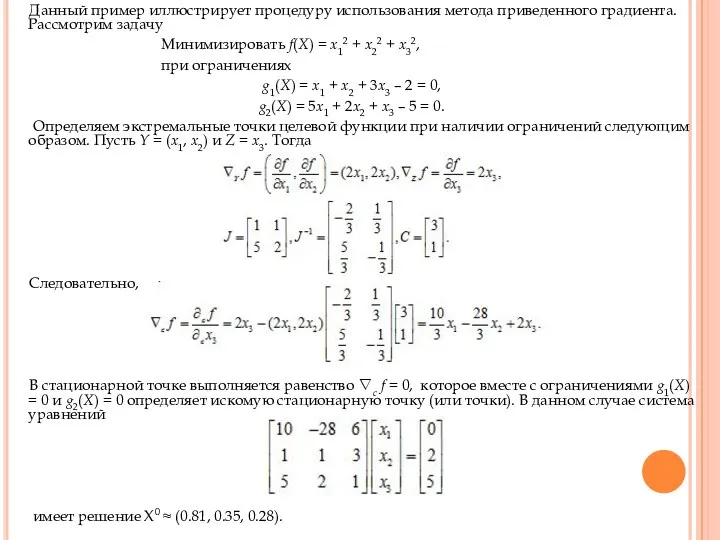
Данный пример иллюстрирует процедуру использования метода приведенного градиента. Рассмотрим задачу
Данный пример иллюстрирует процедуру использования метода приведенного градиента. Рассмотрим задачу
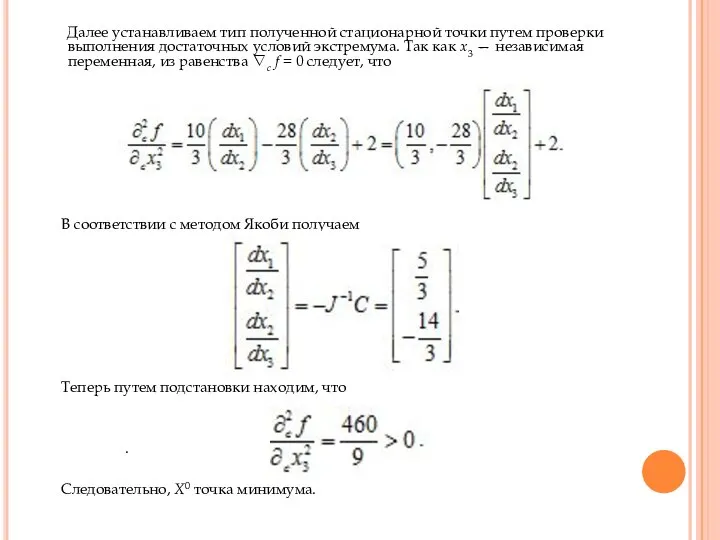
Далее устанавливаем тип полученной стационарной точки путем проверки выполнения достаточных
Далее устанавливаем тип полученной стационарной точки путем проверки выполнения достаточных
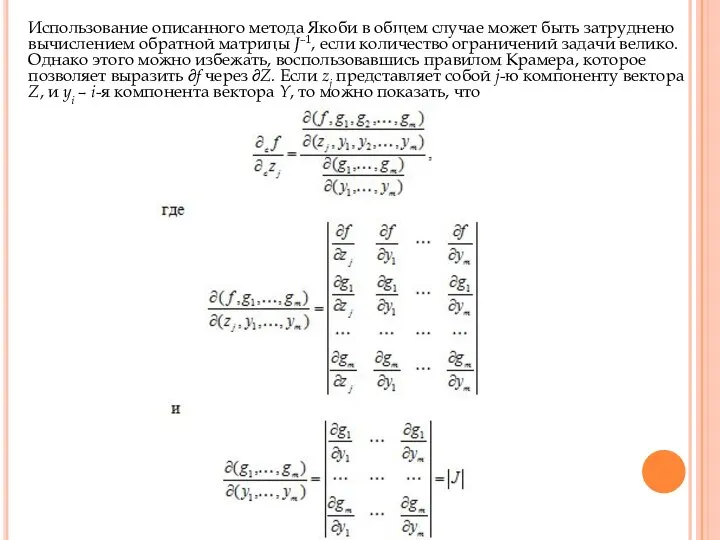
Использование описанного метода Якоби в общем случае может быть затруднено
Использование описанного метода Якоби в общем случае может быть затруднено
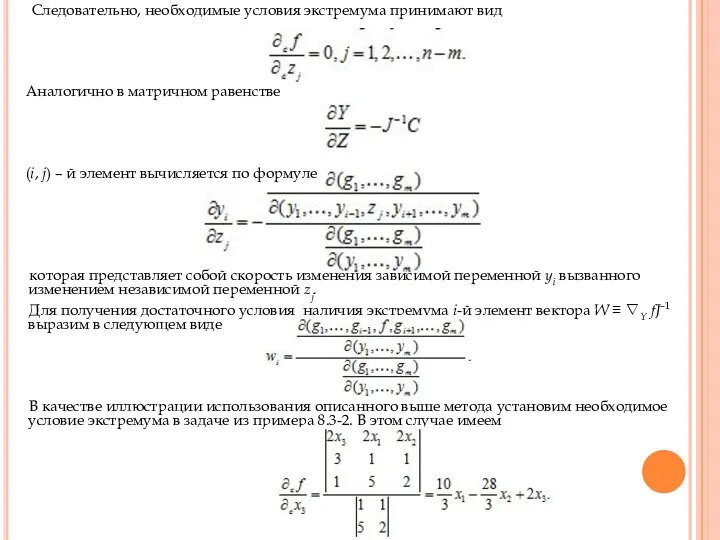
Следовательно, необходимые условия экстремума принимают вид
Аналогично в матричном равенстве
(i, j)
Следовательно, необходимые условия экстремума принимают вид
Аналогично в матричном равенстве
(i, j)
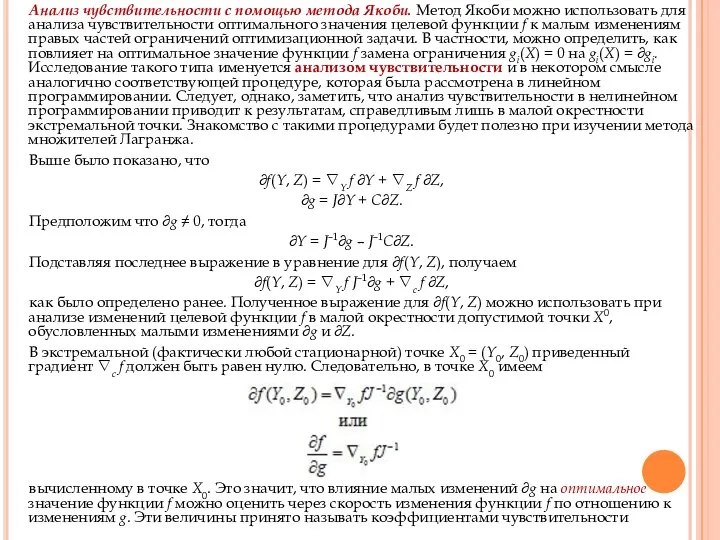
Анализ чувствительности с помощью метода Якоби. Метод Якоби можно использовать
Анализ чувствительности с помощью метода Якоби. Метод Якоби можно использовать
Пример 8.3-3
Рассмотрим задачу из примера 8.3-2. Оптимальной точкой является
Пример 8.3-3
Рассмотрим задачу из примера 8.3-2. Оптимальной точкой является
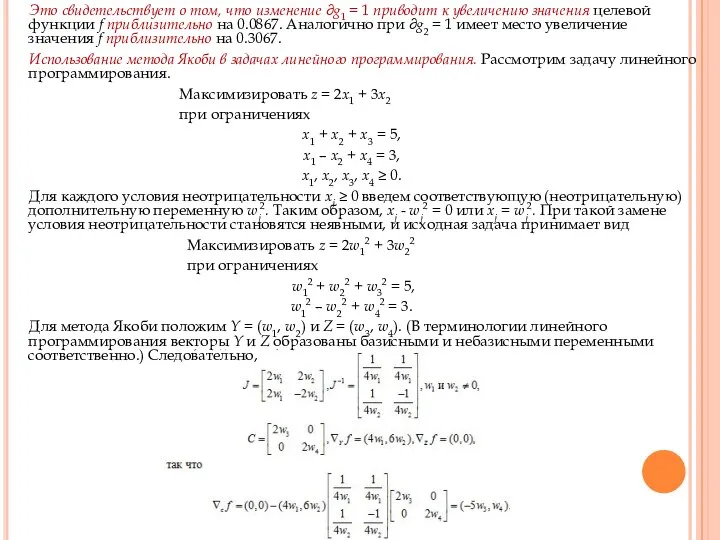
Это свидетельствует о том, что изменение ∂g1 = 1 приводит
Это свидетельствует о том, что изменение ∂g1 = 1 приводит
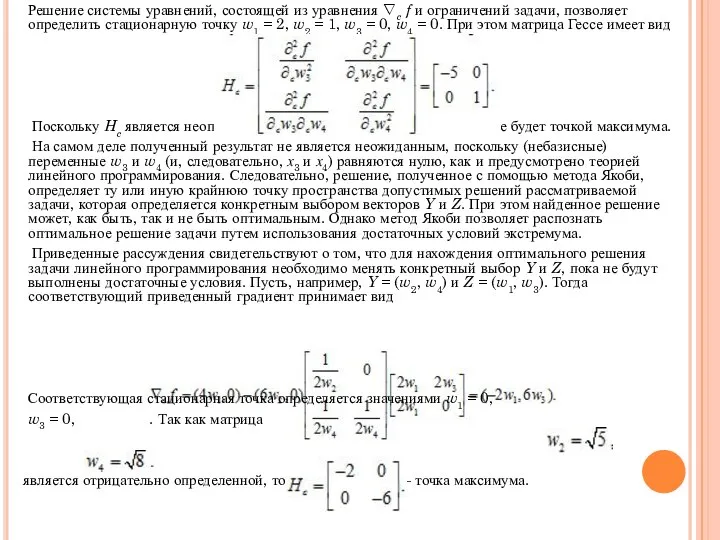
Решение системы уравнений, состоящей из уравнения ∇c f и ограничений задачи,
Решение системы уравнений, состоящей из уравнения ∇c f и ограничений задачи,
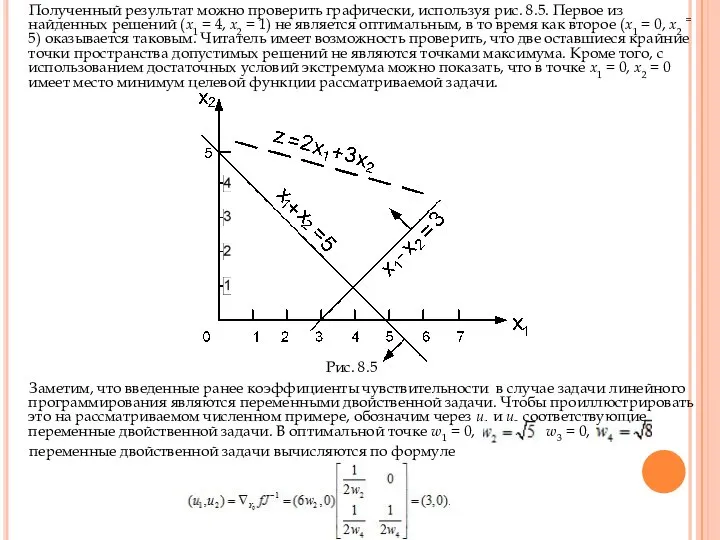
Полученный результат можно проверить графически, используя рис. 8.5. Первое из
Полученный результат можно проверить графически, используя рис. 8.5. Первое из
В точке (3, 0) целевая функция двойственной задачи равна 5u1
В точке (3, 0) целевая функция двойственной задачи равна 5u1
МЕТОД МНОЖИТЕЛЕЙ ЛАГРАНЖА.
Коэффициенты чувствительности метода Якоби
можно использовать для
МЕТОД МНОЖИТЕЛЕЙ ЛАГРАНЖА.
Коэффициенты чувствительности метода Якоби
можно использовать для
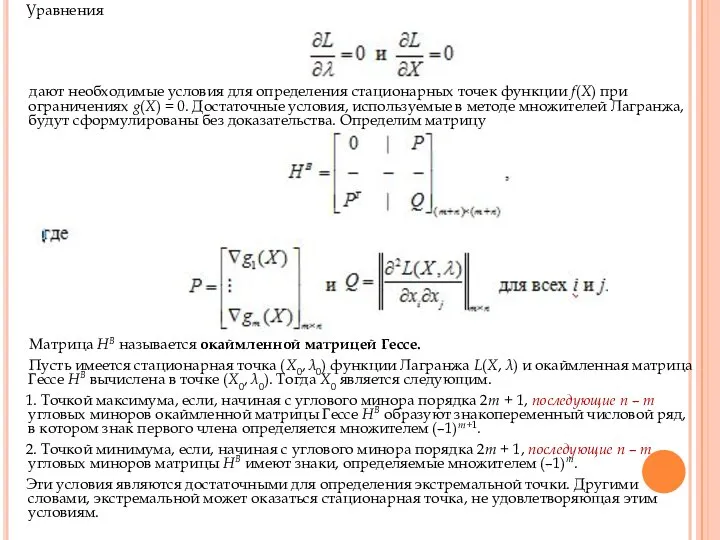
Уравнения
дают необходимые условия для определения стационарных точек функции f(X) при
Уравнения
дают необходимые условия для определения стационарных точек функции f(X) при
Эти условия являются достаточными для определения экстремальной точки. Другими словами,
Эти условия являются достаточными для определения экстремальной точки. Другими словами,
Решением этой системы являются векторы
Х0 = (x1, x2, x3) =
Решением этой системы являются векторы
Х0 = (x1, x2, x3) =
Пример 8.3-5
Рассмотрим задачу
Минимизировать z = x12 + x22
Пример 8.3-5
Рассмотрим задачу
Минимизировать z = x12 + x22

Так как т = 1 и п = 3, то
Так как т = 1 и п = 3, то
Для иллюстрации схемы проверки достаточных условий экстремума, которая использует корни
Для иллюстрации схемы проверки достаточных условий экстремума, которая использует корни
ОБОБЩЕННЫЙ МЕТОД МНОЖИТЕЛЕЙ ЛАГРАНЖА
Предположим, что дана задача, в которой
ОБОБЩЕННЫЙ МЕТОД МНОЖИТЕЛЕЙ ЛАГРАНЖА
Предположим, что дана задача, в которой
Шаг 3. Если k = т, вычисления прекращаются: задача не
Шаг 3. Если k = т, вычисления прекращаются: задача не
Точка безусловного экстремума находится как решение уравнений
Отсюда имеем (x1, х2)
Точка безусловного экстремума находится как решение уравнений
Отсюда имеем (x1, х2)
Как следует из описанной вычислительной процедуры, при реализации обобщенного метода
Как следует из описанной вычислительной процедуры, при реализации обобщенного метода
При ограничениях g(X) ≤ 0 необходимым условием оптимальности в задаче
При ограничениях g(X) ≤ 0 необходимым условием оптимальности в задаче
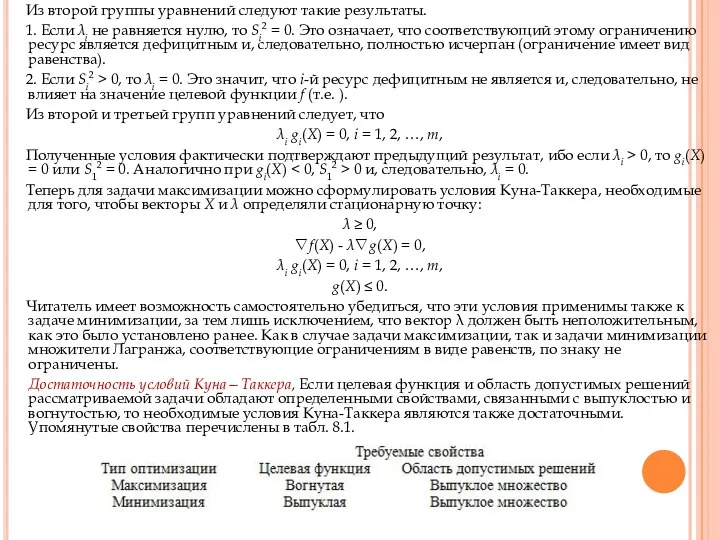
Из второй группы уравнений следуют такие результаты.
1. Если λi
Из второй группы уравнений следуют такие результаты.
1. Если λi
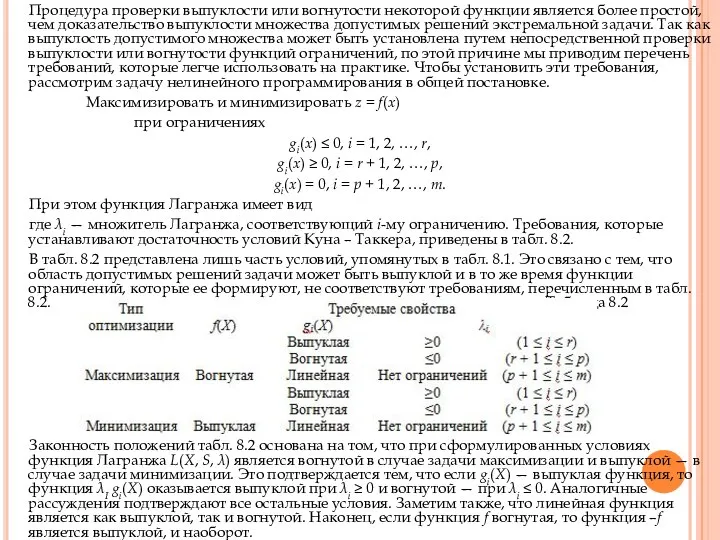
Процедура проверки выпуклости или вогнутости некоторой функции является более простой,
Процедура проверки выпуклости или вогнутости некоторой функции является более простой,
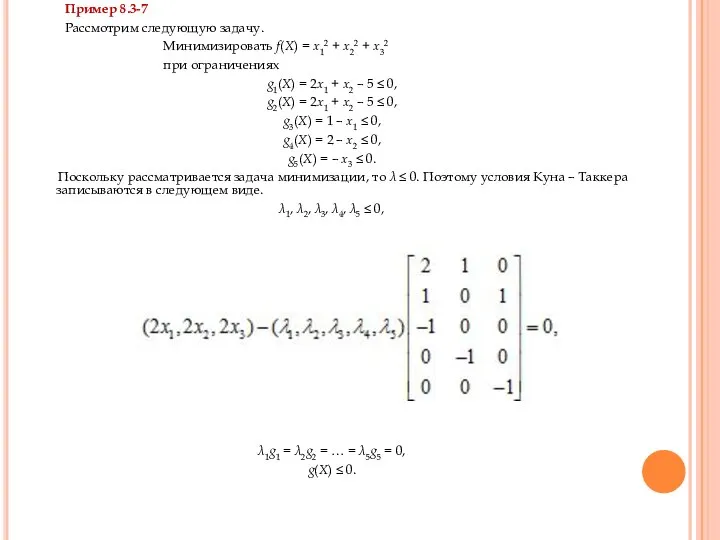
Пример 8.3-7
Рассмотрим следующую задачу.
Минимизировать f(X) = x12 +
Пример 8.3-7
Рассмотрим следующую задачу.
Минимизировать f(X) = x12 +
Эти условия можно упростить и привести к виду
λ1, λ2, λ3,
Эти условия можно упростить и привести к виду
λ1, λ2, λ3,
 Маркетинг как форма деятельности
Маркетинг как форма деятельности  Рынок труда Модель монополии и монопсонии
Рынок труда Модель монополии и монопсонии  Презентация «Наш дружный класс» Авторы проекта: Столярчук Яна, Егорова Анастасия, Чистякова Дарья Руководитель : Царенко На
Презентация «Наш дружный класс» Авторы проекта: Столярчук Яна, Егорова Анастасия, Чистякова Дарья Руководитель : Царенко На Кенжалиев Е 312 топ ОМ
Кенжалиев Е 312 топ ОМ Автобиография Светланы Владимировны Россинской
Автобиография Светланы Владимировны Россинской Кинематический анализ сооружений
Кинематический анализ сооружений Первоучители словенские. (1 класс)
Первоучители словенские. (1 класс) Morning in a pine forest
Morning in a pine forest Русская икона
Русская икона Технологии активных видов туризма: (на примере проектирования и продвижения веломаршрутов в России)
Технологии активных видов туризма: (на примере проектирования и продвижения веломаршрутов в России) Понятие системы и ее свойства Выполнили: Очаева Заяна Коршунова Алена
Понятие системы и ее свойства Выполнили: Очаева Заяна Коршунова Алена Отчет по преддипломной практике
Отчет по преддипломной практике Презентация Основные подходы к формированию цен
Презентация Основные подходы к формированию цен  Месторождение Кантарель
Месторождение Кантарель Професія автомеханіка
Професія автомеханіка Священники средневековья
Священники средневековья Подборка и анализ поселков численностью 2000 человек
Подборка и анализ поселков численностью 2000 человек астрономия древнейшая из наук
астрономия древнейшая из наук Порядок выполнения эскиза детали
Порядок выполнения эскиза детали  Определенный интеграл
Определенный интеграл Жесты судей
Жесты судей Второе Пришествие
Второе Пришествие Я и моя профессия. Торговля
Я и моя профессия. Торговля Массивы и указатели
Массивы и указатели Римское право. Классификация договоров
Римское право. Классификация договоров How to plan your holidays correctly
How to plan your holidays correctly Объект защиты - ГИС
Объект защиты - ГИС лекция 2-1
лекция 2-1