- Когерентно - імпульсна РЛС

Содержание
- 2. Принцип дії когерентної РЛС. Деякі питання селекції цілей, що рухаються. Структурна схема когерентно–імпульсної РЛС з істинною
- 3. Принцип дії когерентної РЛС Відмінною ознакою когерентно-імпульсних РЛС у порівнянні зі звичайними некогерентними є те, що
- 4. Рухома ціль дає відбитий сигнал, частота якого відрізняється на величину доплерівського зміщення від частоти сигналу нерухомої
- 5. Рис. 1. Послідовність зондуючих радіоімпульсів Рис. 2. Спектр зондуючого сигналу
- 6. Кожна складова спектру відбитого сигналу буде мати частоту fkv=fk(1+2Vr/C) Частотний інтервал між сусідніми гармоніками буде: Fnv=fkv-fk-1,v=fk(1+2Vr/C)-(fk-Fn)(1+2Vr/C)=Fn(1+2Vr/C)
- 7. Послідовність відбитих імпульсів має менший період повторення (рис. 4). Tnv=1/Fnv=1/Fn(1+2Vr/C)=Tn/(1+2Vr/C) Якщо помножити і поділити цей вираз
- 8. Рис. 4.
- 9. Деякі питання селекції цілей, що рухаються Якщо в кожному періоді фіксувати різницю фаз між випроміненим і
- 10. За способом створення опорної напруги когерентно-імпульсні РЛС поділяють на станції з внутрішньою і зовнішньою когерентністю. В
- 11. Системи СРЦ можна класифікувати за наступними ознаками: За способом забезпечення когерентності імпульсів в пачці: з істинною
- 12. Структурна схема когерентно–імпульсної РЛС з істинною внутрішньою когерентністю
- 13. Сигнали, відбиті від нерухомих (місцевих) предметів мають ту ж саму частоту f, а частота сигналів від
- 14. Порівнюючи фазу відбитих сигналів з фазою сигналів, що випромінюються, можна було б відрізнити сигнал рухомої цілі
- 16. Поняття “сліпа швидкість”. Якщо ціль має таку радіальну швидкість, що за період повторення наближається (або віддаляється)
- 18. Скачать презентацию
Принцип дії когерентної РЛС.
Деякі питання селекції цілей, що рухаються.
Структурна схема когерентно–імпульсної
Принцип дії когерентної РЛС.
Деякі питання селекції цілей, що рухаються.
Структурна схема когерентно–імпульсної

Принцип дії когерентної РЛС
Відмінною ознакою когерентно-імпульсних РЛС у порівнянні зі звичайними
Принцип дії когерентної РЛС
Відмінною ознакою когерентно-імпульсних РЛС у порівнянні зі звичайними
Рухома ціль дає відбитий сигнал, частота якого відрізняється на величину доплерівського
Рухома ціль дає відбитий сигнал, частота якого відрізняється на величину доплерівського
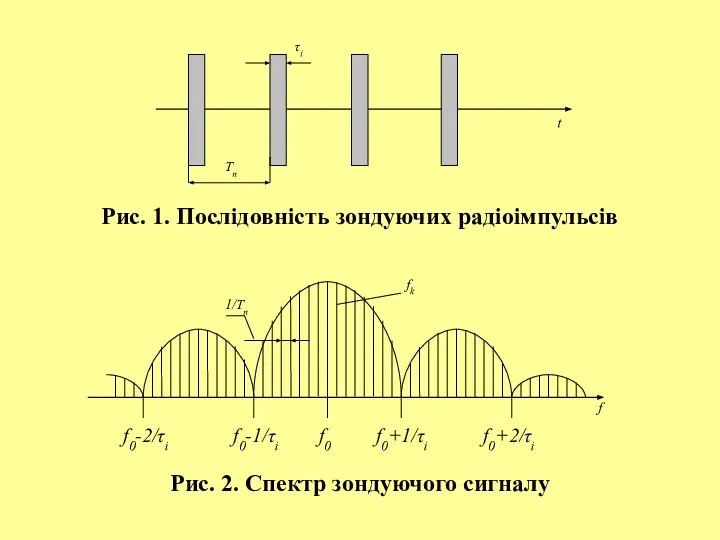
Рис. 1. Послідовність зондуючих радіоімпульсів
Рис. 2. Спектр зондуючого сигналу
Рис. 1. Послідовність зондуючих радіоімпульсів
Рис. 2. Спектр зондуючого сигналу
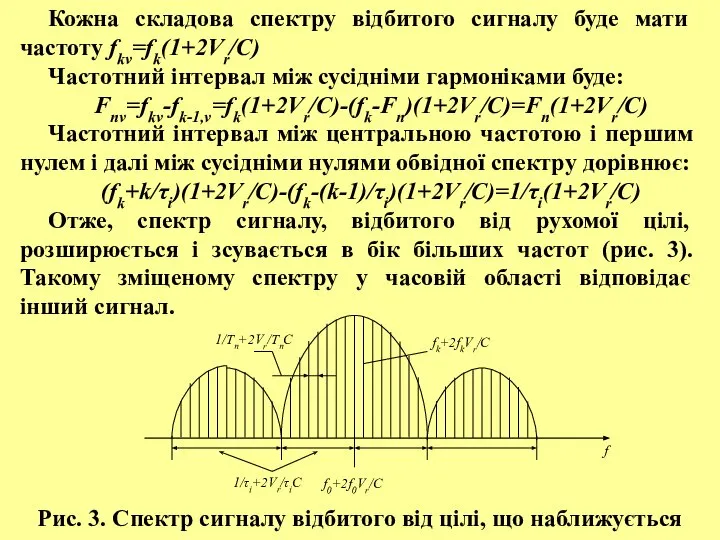
Кожна складова спектру відбитого сигналу буде мати частоту fkv=fk(1+2Vr/C)
Частотний інтервал між
Кожна складова спектру відбитого сигналу буде мати частоту fkv=fk(1+2Vr/C)
Частотний інтервал між
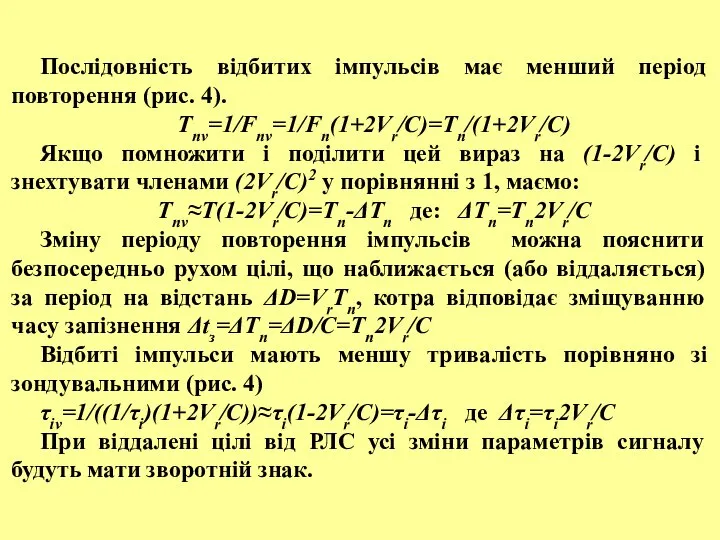
Послідовність відбитих імпульсів має менший період повторення (рис. 4).
Tnv=1/Fnv=1/Fn(1+2Vr/C)=Tn/(1+2Vr/C)
Якщо помножити і
Послідовність відбитих імпульсів має менший період повторення (рис. 4).
Tnv=1/Fnv=1/Fn(1+2Vr/C)=Tn/(1+2Vr/C)
Якщо помножити і
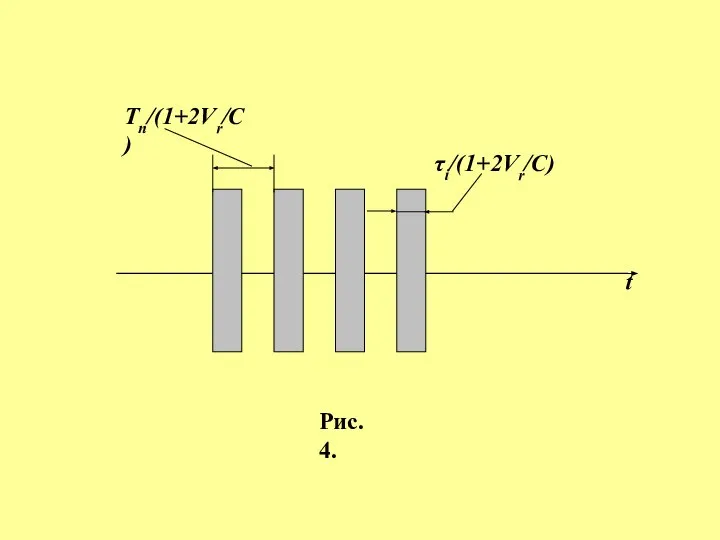
Рис. 4.
Рис. 4.
Деякі питання селекції цілей, що рухаються
Якщо в кожному періоді фіксувати різницю
Деякі питання селекції цілей, що рухаються
Якщо в кожному періоді фіксувати різницю
За способом створення опорної напруги когерентно-імпульсні РЛС поділяють на станції з
За способом створення опорної напруги когерентно-імпульсні РЛС поділяють на станції з
Системи СРЦ можна класифікувати за наступними ознаками:
За способом забезпечення когерентності імпульсів
Системи СРЦ можна класифікувати за наступними ознаками:
За способом забезпечення когерентності імпульсів
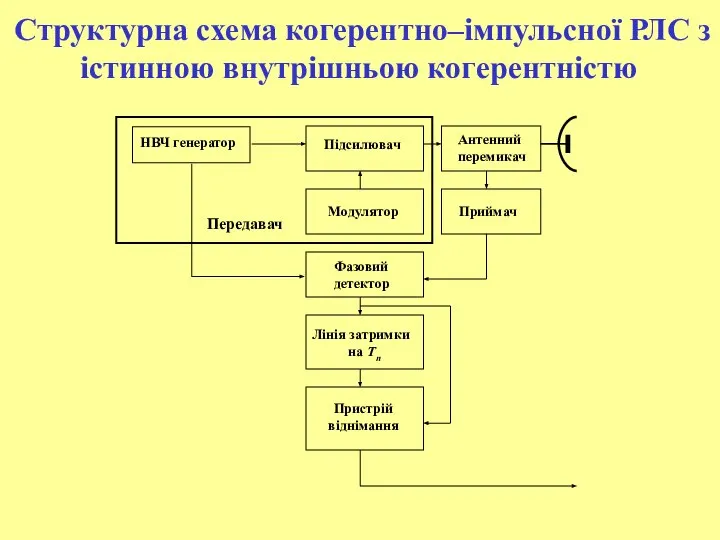
Структурна схема когерентно–імпульсної РЛС з істинною внутрішньою когерентністю
Структурна схема когерентно–імпульсної РЛС з істинною внутрішньою когерентністю
Сигнали, відбиті від нерухомих (місцевих) предметів мають ту ж саму частоту
Сигнали, відбиті від нерухомих (місцевих) предметів мають ту ж саму частоту
Порівнюючи фазу відбитих сигналів з фазою сигналів, що випромінюються, можна було
Порівнюючи фазу відбитих сигналів з фазою сигналів, що випромінюються, можна було
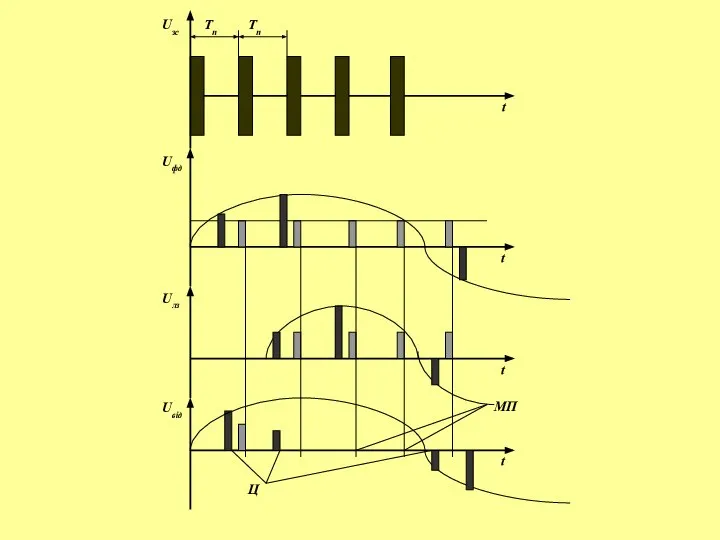
Поняття “сліпа швидкість”.
Якщо ціль має таку радіальну швидкість, що за
Поняття “сліпа швидкість”.
Якщо ціль має таку радіальну швидкість, що за
 Сибирское таможенное управление
Сибирское таможенное управление Фурье
Фурье Туркеста́но-Сиби́рская магистра́ль
Туркеста́но-Сиби́рская магистра́ль Достопримечательности Лондона
Достопримечательности Лондона Perfekt
Perfekt Нравственно-патриотическое воспитание дошкольников через ознакомление с традициями и культурой своего народа
Нравственно-патриотическое воспитание дошкольников через ознакомление с традициями и культурой своего народа РЕЗЕРВНЫЙ ФОНД,ЕГО ЗНАЧЕНИЕ ДЛЯ РОССИЙСКОЙ ЭКОНОМИКИ ВЫПОЛНИЛА СТУДЕНТКА 4 КУРСА ГРУППЫ Т-081 УЛАН КЫЗЫ АЙГЕРИМ
РЕЗЕРВНЫЙ ФОНД,ЕГО ЗНАЧЕНИЕ ДЛЯ РОССИЙСКОЙ ЭКОНОМИКИ ВЫПОЛНИЛА СТУДЕНТКА 4 КУРСА ГРУППЫ Т-081 УЛАН КЫЗЫ АЙГЕРИМ Особенности выполнения программ AVR-МК
Особенности выполнения программ AVR-МК Презентация Разделение властей и система противовесов в Афинах
Презентация Разделение властей и система противовесов в Афинах  Изображение весны в творчестве русских живописцев
Изображение весны в творчестве русских живописцев Православный праздник пасхи
Православный праздник пасхи Бұл қазақ халқының ең бірінші панасы
Бұл қазақ халқының ең бірінші панасы Моє хобі - футбол
Моє хобі - футбол Грузовая авианакладная
Грузовая авианакладная Плиты с деревянным каркасом. Конструирование и расчет. Пластмассовые плиты
Плиты с деревянным каркасом. Конструирование и расчет. Пластмассовые плиты Презентация на тему Можно ли жить и не дышать?
Презентация на тему Можно ли жить и не дышать? Школа футбольного арбитра. Правило 9. Мяч в игре и не в игре
Школа футбольного арбитра. Правило 9. Мяч в игре и не в игре Презентация Металлоизделия
Презентация Металлоизделия Онкология Лекция для студентов III курса врачебных факультетов Профессор В.И.Тихонов
Онкология Лекция для студентов III курса врачебных факультетов Профессор В.И.Тихонов  SLF4J project
SLF4J project  Русская прялка
Русская прялка Граждане как субъекты административного права
Граждане как субъекты административного права Датчики. Лямбда-зонд, датчики частоты вращения коленвала и распредвал
Датчики. Лямбда-зонд, датчики частоты вращения коленвала и распредвал Крещение Господне
Крещение Господне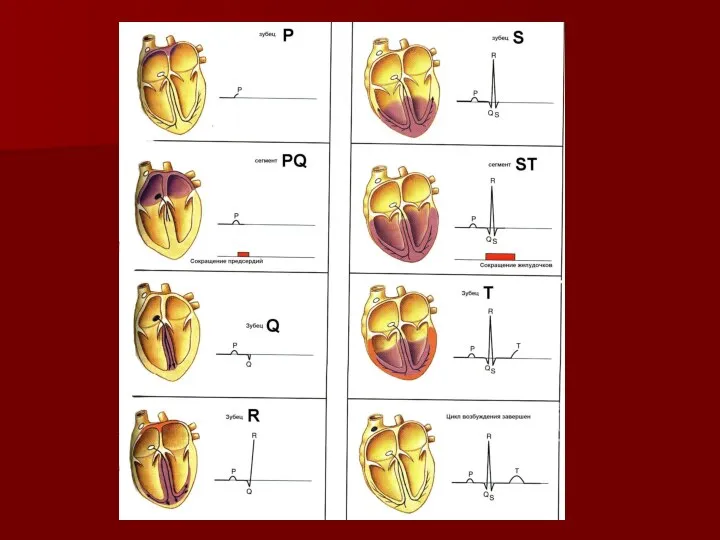 ЭКГ у детей
ЭКГ у детей История медицины в Китае и Тибете
История медицины в Китае и Тибете  Министерство Юстиции РФ
Министерство Юстиции РФ  Киберпреступность
Киберпреступность