- Лабораторна установка по дослідженню вбудованих систем керування на базі контролера Segnetics

Содержание
- 2. Мета: розробка та дослідження вбудованих систем керування на базі мікроконтролерів Segnetic та введення їх в навчальний
- 3. Структурна схема стенду для дослідження вбудованих систем керування 3
- 4. Алгоритм роботи стенду мікроклімат 4 Алгоритм роботи стенду мікроклімат Алгоритм роботи маніпулятора МП-9С
- 5. Розімкнута модель системи управління Модель розімкнутої системи управління та перехідна характеристика температури в приміщенні при ручному
- 6. Замкнута модель системи управління Модель САУ температурними режимами та характеристика ПЧ при використанні закнутої системи керування
- 7. Програма керування маніпулятором МП-9С Макрос автоматичного режиму керування Макрос ручного режиму керування 7
- 8. Блок-діаграма для реалізації ПІД-регулятора 8 Макрос для контролю обриву лінії Макрос для перевірки правильності виконання алгоритму
- 9. Програма керування мікрокліматом 9
- 11. Скачать презентацию
Мета: розробка та дослідження вбудованих систем керування на
базі мікроконтролерів
Мета: розробка та дослідження вбудованих систем керування на
базі мікроконтролерів

Структурна схема стенду для дослідження
вбудованих систем керування
3
Структурна схема стенду для дослідження
вбудованих систем керування
3
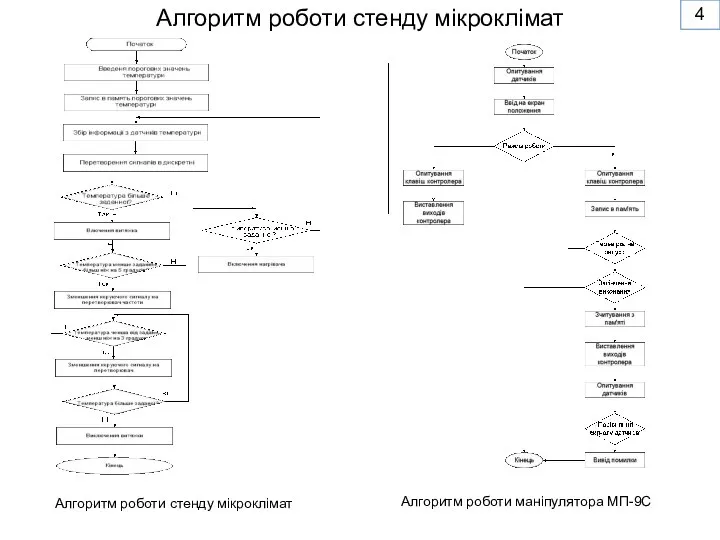
Алгоритм роботи стенду мікроклімат
4
Алгоритм роботи стенду мікроклімат
Алгоритм роботи маніпулятора МП-9С
Алгоритм роботи стенду мікроклімат
4
Алгоритм роботи стенду мікроклімат
Алгоритм роботи маніпулятора МП-9С

Розімкнута модель системи управління
Модель розімкнутої системи управління та перехідна характеристика температури
Розімкнута модель системи управління
Модель розімкнутої системи управління та перехідна характеристика температури

Замкнута модель системи управління
Модель САУ температурними режимами та характеристика ПЧ при
Замкнута модель системи управління
Модель САУ температурними режимами та характеристика ПЧ при

Програма керування маніпулятором МП-9С
Макрос автоматичного режиму керування
Макрос ручного режиму керування
7
Програма керування маніпулятором МП-9С
Макрос автоматичного режиму керування
Макрос ручного режиму керування
7
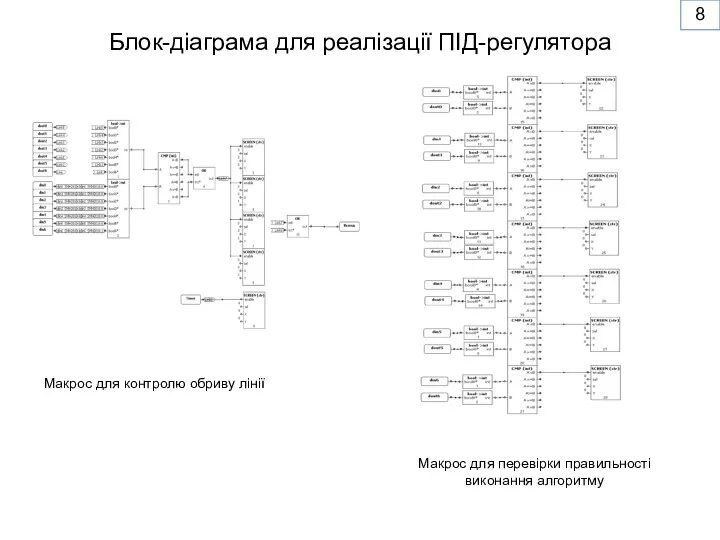
Блок-діаграма для реалізації ПІД-регулятора
8
Макрос для контролю обриву лінії
Макрос для перевірки правильності
виконання
Блок-діаграма для реалізації ПІД-регулятора
8
Макрос для контролю обриву лінії
Макрос для перевірки правильності
виконання
Програма керування мікрокліматом
9
Програма керування мікрокліматом
9
 ГОСТ 7.0-99 «Информационно-библиотечная деятельность, библиография. Термины и определения»
ГОСТ 7.0-99 «Информационно-библиотечная деятельность, библиография. Термины и определения» Дзюдо в детском саду. Учебная программа составлена с учётом возраста обучающихся (мальчики и девочки) – 5-7 лет
Дзюдо в детском саду. Учебная программа составлена с учётом возраста обучающихся (мальчики и девочки) – 5-7 лет Основы строительной стандартизации
Основы строительной стандартизации Комбинаторные задачи и начальные сведения из теории вероятностей в курсе алгебры 9 класса.
Комбинаторные задачи и начальные сведения из теории вероятностей в курсе алгебры 9 класса.  Сборка компьютера. (Глава 3)
Сборка компьютера. (Глава 3) Модули
Модули Кредитование внешнеторговых операций Выполнили: Жукова Юлия Жукова Зоя
Кредитование внешнеторговых операций Выполнили: Жукова Юлия Жукова Зоя Організація оповіщення про хімічні надзвичайні ситуації
Організація оповіщення про хімічні надзвичайні ситуації Общая характеристика системы физического воспитания
Общая характеристика системы физического воспитания Языкознание эпохи Возрождения
Языкознание эпохи Возрождения Ecowiki.ru Вики-портал – площадка для сбора единой базы актуальных знаний и ресурсов по различным эко-направлениям Рассылка: ecowiki@googlegrou
Ecowiki.ru Вики-портал – площадка для сбора единой базы актуальных знаний и ресурсов по различным эко-направлениям Рассылка: ecowiki@googlegrou Чрезвычайные ситуации
Чрезвычайные ситуации kishechnye_shvy
kishechnye_shvy Средства наблюдения
Средства наблюдения эко
эко Компонувальник. Патерни проектування
Компонувальник. Патерни проектування Коффердам
Коффердам Предпосылки модернизации системы подготовки спортивного резерва в Российской Федерации и ход ее реализации
Предпосылки модернизации системы подготовки спортивного резерва в Российской Федерации и ход ее реализации Значение массажа в системе устранения заикания
Значение массажа в системе устранения заикания История развития и современное состояние оздоровительной и адаптивной физической культуры
История развития и современное состояние оздоровительной и адаптивной физической культуры Обзор изменений и нововведений в законодательстве для субъектов малого предпринимательства в 2018-2019 годах
Обзор изменений и нововведений в законодательстве для субъектов малого предпринимательства в 2018-2019 годах Комбинационные цифровые схемы
Комбинационные цифровые схемы Презентация на тему "Инактивированные вакцины" - скачать презентации по Медицине
Презентация на тему "Инактивированные вакцины" - скачать презентации по Медицине Сканирующий тахеометр Trimble SX10
Сканирующий тахеометр Trimble SX10 Размещение в документе графики
Размещение в документе графики Соціальні норми в Об’єднаних Арабських Еміратах
Соціальні норми в Об’єднаних Арабських Еміратах Техническая защита информации
Техническая защита информации В каждой мимолётности вижу я миры.
В каждой мимолётности вижу я миры.