- Линейность преобразования координат

Содержание
- 2. Лекция 6. Преобразования Лоренца
- 3. 6.1.1.Постулаты. Поскольку преобразования Галилея для достаточно больших скоростей приводят к выводам, противоречащим экспериментам, и постоянство скорости
- 4. 6.1.2.Линейность преобразования координат. Ориентировку движущихся систем координат чисто геометрическими преобразованиями, сводящимися к пространственным поворотам и переносам
- 5. Общий вид этих функций определяется свойствами пространства и времени. При рассмотрении геометрических соотношений в выбранной системе
- 6. Однородность и изотропность пространства являются его главными свойствами в инерциальных системах координат. Время также обладает важнейшим
- 7. Из однородности пространства и времени следует, что преобразования (6.1.1) должны быть линейными. Для доказательства рассмотрим бесконечно
- 8. где А1, А2, А3, А4 и А5 — постоянные. Таким образом, функция Ф1 (х,y,z,t) является линейной
- 9. (6.1.5) при любых х, у, z и t. Это возможно лишь при условии а1 = а3
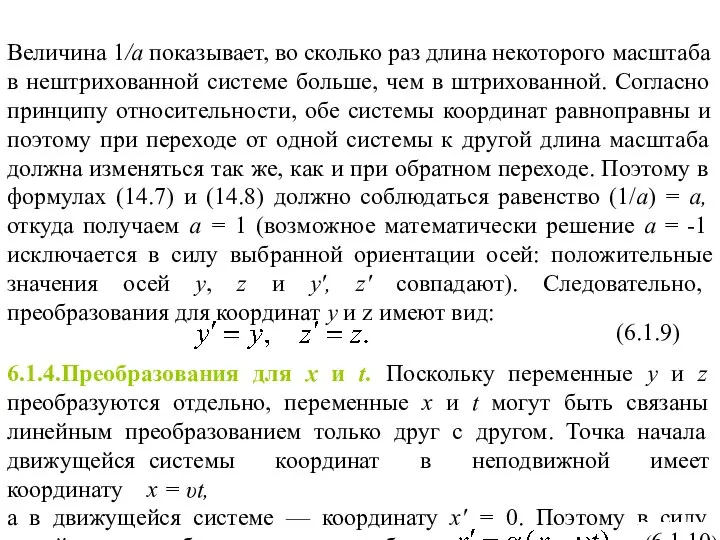
- 10. Величина 1/а показывает, во сколько раз длина некоторого масштаба в нештрихованной системе больше, чем в штрихованной.
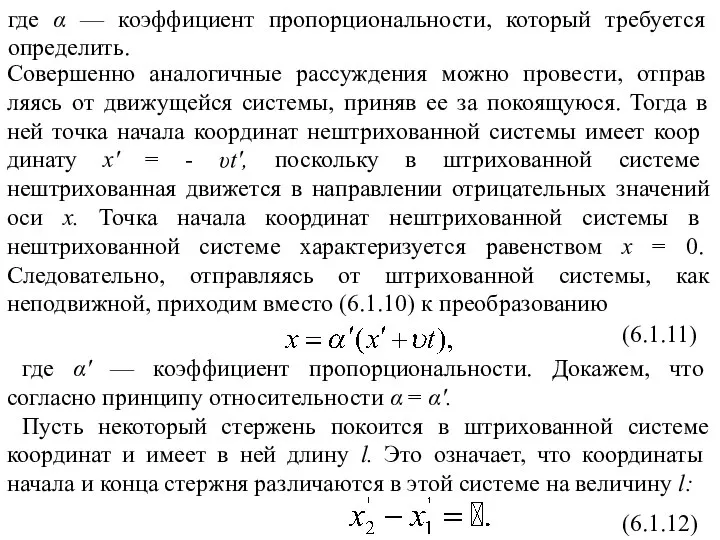
- 11. где α' — коэффициент пропорциональности. Докажем, что согласно принципу относительности α = α'. Пусть некоторый стержень
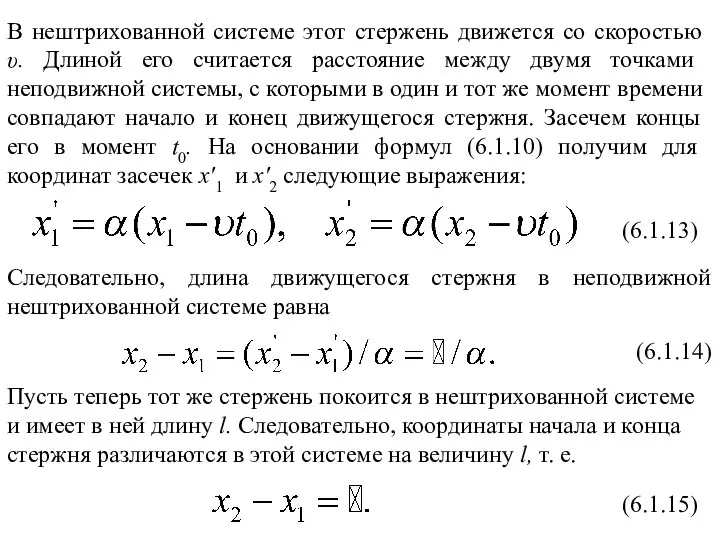
- 12. (6.1.13) В нештрихованной системе этот стержень движется со скоростью υ. Длиной его считается расстояние между двумя
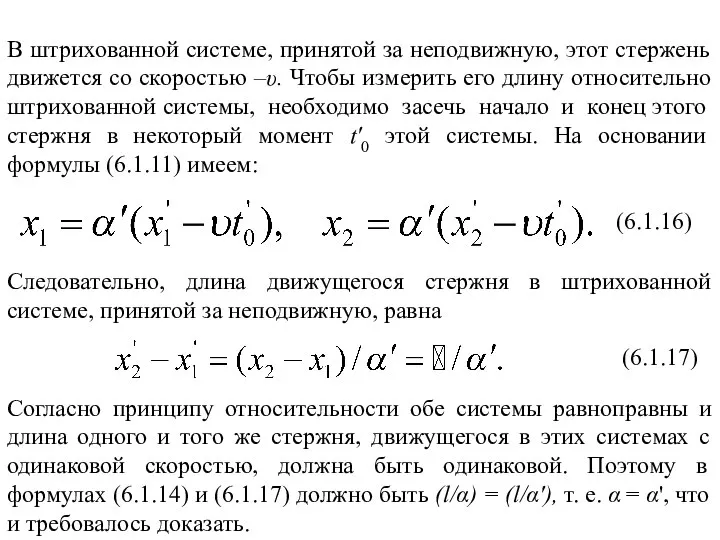
- 13. В штрихованной системе, принятой за неподвижную, этот стержень движется со скоростью –υ. Чтобы измерить его длину
- 14. Теперь воспользуемся постулатом постоянства скорости света. Пусть в момент времени, когда начала координат совпадают и когда
- 15. Из равенства (6.1.11), используя (6.1.10), имеем (6.1.21) откуда с учетом (6.1.20) (6.1.22) 6.1.5.Преобразования Лоренца. Преобразования (6.1.9),
- 16. Обратные преобразования согласно принципу относительности имеют такой же вид, но лишь изменяется знак скорости: (6.1.24) Переход
- 17. 6.1.6.Преобразования Галилея как предельный случай преобразований Лоренца. В предельном случае скоростей, много меньших скорости света, в
- 19. Скачать презентацию
Лекция 6. Преобразования Лоренца
Лекция 6. Преобразования Лоренца
6.1.1.Постулаты. Поскольку преобразования Галилея для достаточно больших скоростей приводят к выводам,
6.1.1.Постулаты. Поскольку преобразования Галилея для достаточно больших скоростей приводят к выводам,
6.1.2.Линейность преобразования координат. Ориентировку движущихся систем координат чисто геометрическими преобразованиями, сводящимися
6.1.2.Линейность преобразования координат. Ориентировку движущихся систем координат чисто геометрическими преобразованиями, сводящимися
Общий вид этих функций определяется свойствами пространства и времени. При рассмотрении
Общий вид этих функций определяется свойствами пространства и времени. При рассмотрении
Однородность и изотропность пространства являются его главными свойствами в инерциальных системах
Однородность и изотропность пространства являются его главными свойствами в инерциальных системах
Из однородности пространства и времени следует, что преобразования (6.1.1) должны быть
Из однородности пространства и времени следует, что преобразования (6.1.1) должны быть
где А1, А2, А3, А4 и А5 — постоянные. Таким образом,
(6.1.5)
при любых х, у, z и t. Это возможно лишь
(6.1.5)
при любых х, у, z и t. Это возможно лишь
Величина 1/а показывает, во сколько раз длина некоторого масштаба в нештрихованной
Величина 1/а показывает, во сколько раз длина некоторого масштаба в нештрихованной
где α' — коэффициент пропорциональности. Докажем, что согласно принципу относительности α
где α' — коэффициент пропорциональности. Докажем, что согласно принципу относительности α
(6.1.13)
В нештрихованной системе этот стержень движется со скоростью υ. Длиной его
(6.1.13)
В нештрихованной системе этот стержень движется со скоростью υ. Длиной его
В штрихованной системе, принятой за неподвижную, этот стержень движется со скоростью
В штрихованной системе, принятой за неподвижную, этот стержень движется со скоростью
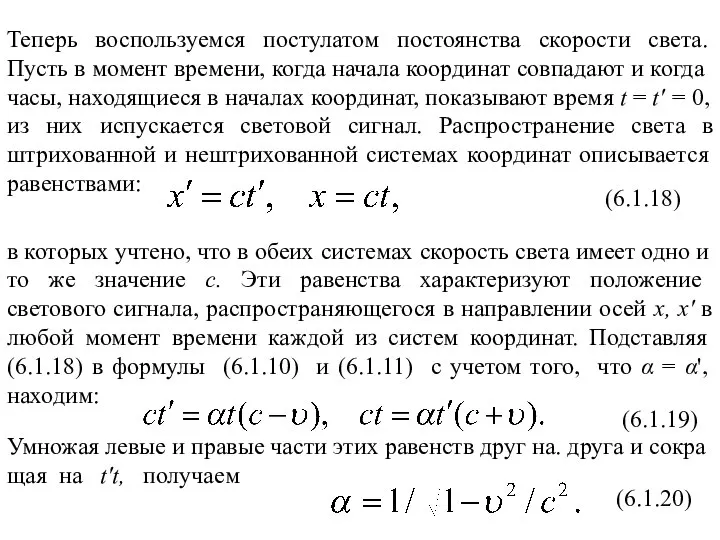
Теперь воспользуемся постулатом постоянства скорости света. Пусть в момент времени, когда
Теперь воспользуемся постулатом постоянства скорости света. Пусть в момент времени, когда
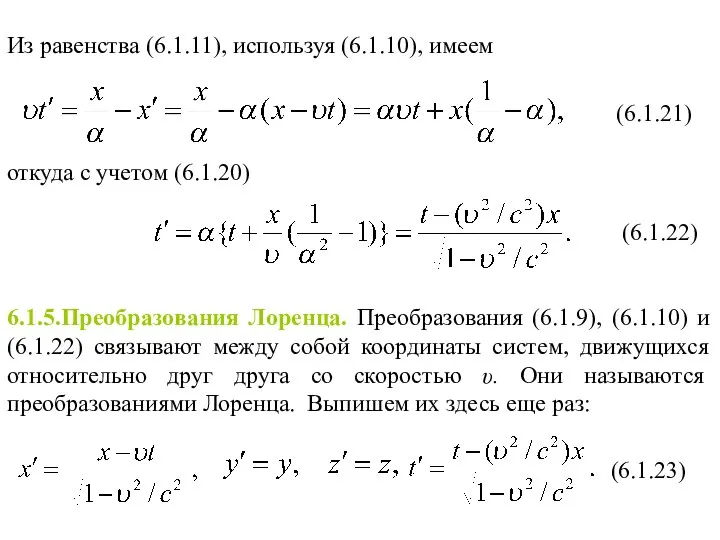
Из равенства (6.1.11), используя (6.1.10), имеем
(6.1.21)
откуда с учетом (6.1.20)
(6.1.22)
6.1.5.Преобразования Лоренца. Преобразования
Из равенства (6.1.11), используя (6.1.10), имеем
(6.1.21)
откуда с учетом (6.1.20)
(6.1.22)
6.1.5.Преобразования Лоренца. Преобразования
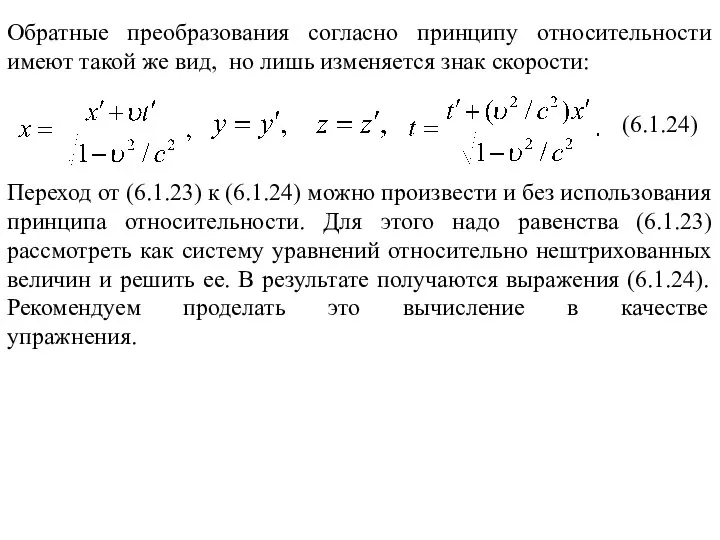
Обратные преобразования согласно принципу относительности имеют такой же вид, но лишь
Обратные преобразования согласно принципу относительности имеют такой же вид, но лишь
6.1.6.Преобразования Галилея как предельный случай преобразований Лоренца. В предельном случае скоростей,
6.1.6.Преобразования Галилея как предельный случай преобразований Лоренца. В предельном случае скоростей,
 Правове регулювання фінансового контролю
Правове регулювання фінансового контролю Хохломская роспись
Хохломская роспись Воспитание детей на традициях народной культуры
Воспитание детей на традициях народной культуры Презентация Правовое регулирование использования и охраны вод
Презентация Правовое регулирование использования и охраны вод  МКОУ «Покровская средняя общеобразовательная школа» ВИЗИТКА «МЫ И НАША РАБОТА» ШМО гуманитарного Цикла Сом
МКОУ «Покровская средняя общеобразовательная школа» ВИЗИТКА «МЫ И НАША РАБОТА» ШМО гуманитарного Цикла Сом Особенности ядерного (сильного) взаимодействия Выполнил студент группы T-111 Рекин Сергей.
Особенности ядерного (сильного) взаимодействия Выполнил студент группы T-111 Рекин Сергей. Туберкулез
Туберкулез  Презентация Организация таможенной статистики в канаде
Презентация Организация таможенной статистики в канаде акуш лек 5 физиол роды ч 2
акуш лек 5 физиол роды ч 2 Павел Ростовцев
Павел Ростовцев Конференция ООН по торговле и развитию (ЮНКТАД) Юрлова Виктория, МЭ-102, ДС.02
Конференция ООН по торговле и развитию (ЮНКТАД) Юрлова Виктория, МЭ-102, ДС.02 Межгосударственный стандарт ГОСТ 30389-2013
"Услуги общественного питания. Предприятия общественного питания
Межгосударственный стандарт ГОСТ 30389-2013
"Услуги общественного питания. Предприятия общественного питания Понятие, многообразие и формы культуры
Понятие, многообразие и формы культуры Закономерности распределения напряжений в грунте фазы деформаций грунта под фундаментом
Закономерности распределения напряжений в грунте фазы деформаций грунта под фундаментом Корпоративная социальная ответственность: институциональная теория и российская практика Л. Полищук
Корпоративная социальная ответственность: институциональная теория и российская практика Л. Полищук  Развития транспортной инфраструктуры Санкт-Петербурга
Развития транспортной инфраструктуры Санкт-Петербурга  Календарно-обрядові пісні
Календарно-обрядові пісні Тема программы: Изучение ассортимента товаров. Тема урока: Ассортимент субтропических, тропических и экзотических плодов.
Тема программы: Изучение ассортимента товаров. Тема урока: Ассортимент субтропических, тропических и экзотических плодов.  Лазеры на красителях
Лазеры на красителях  Австрийский вариант немецкого языка
Австрийский вариант немецкого языка Государственное регулирование ВЭД в Японии Презентацию подготовила Нечаева А. студентка 3-его курса экономического факультета, г
Государственное регулирование ВЭД в Японии Презентацию подготовила Нечаева А. студентка 3-его курса экономического факультета, г Московская городская нотариальная палата Выполнила студентка группы Ю-104 Чуева Яна
Московская городская нотариальная палата Выполнила студентка группы Ю-104 Чуева Яна Спортивна підготовка
Спортивна підготовка О требованиях федерального законодательства к печатным и сетевым СМИ
О требованиях федерального законодательства к печатным и сетевым СМИ Сдача нормативов ГТО
Сдача нормативов ГТО Международные правила предупреждения столкновения судов в море. Информация о конвенции
Международные правила предупреждения столкновения судов в море. Информация о конвенции Делопроизводство в образовательном учреждении
Делопроизводство в образовательном учреждении Безопасный Интернет
Безопасный Интернет