- Математические модели объектов дискретной оптимизации

Содержание
- 2. 2.1 Требования к математическим моделям С точки зрения возможности и эффективности выполнения формальных преобразований к математической
- 3. Требования к математическим моделям Правила перехода устанавливают соответствия между компонентами объекта и элементами математической модели, а
- 4. Математические модели объектов «В виде графов можно представлять блок-схемы программ (вершины – блоки, а дуги –
- 5. Пример. Модель алгоритма поиска максимального элемента массива
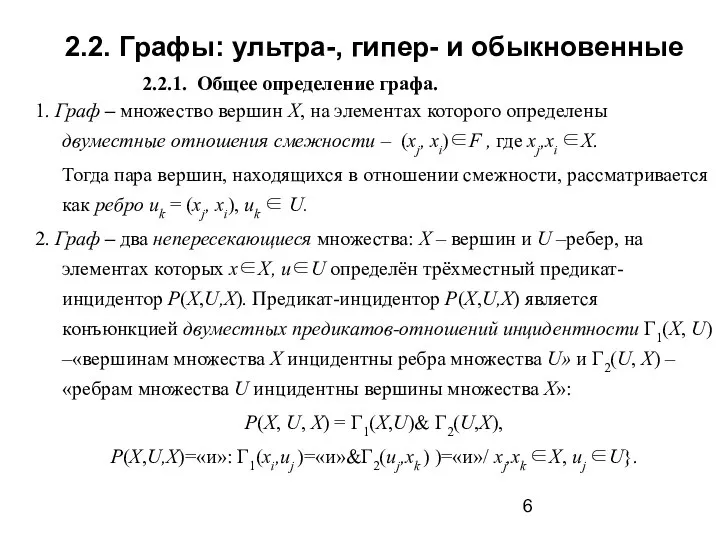
- 6. 2.2. Графы: ультра-, гипер- и обыкновенные 2.2.1. Общее определение графа. 1. Граф – множество вершин X,
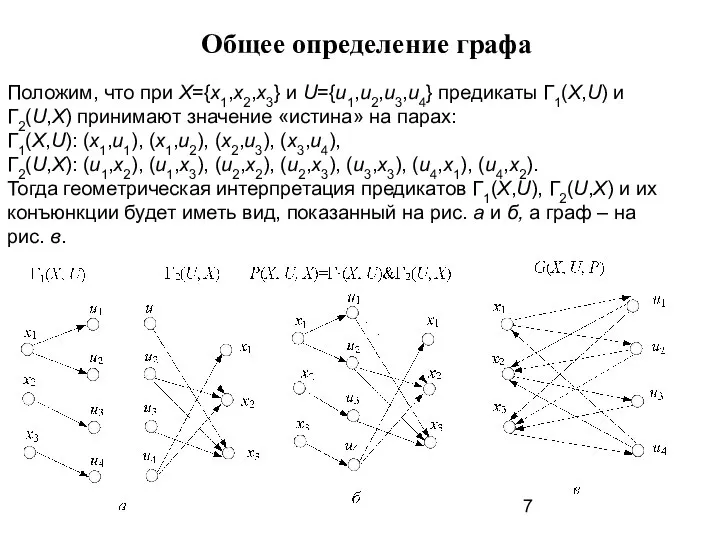
- 7. Общее определение графа Положим, что при X={x1,x2,x3} и U={u1,u2,u3,u4} предикаты Г1(X,U) и Г2(U,X) принимают значение «истина»
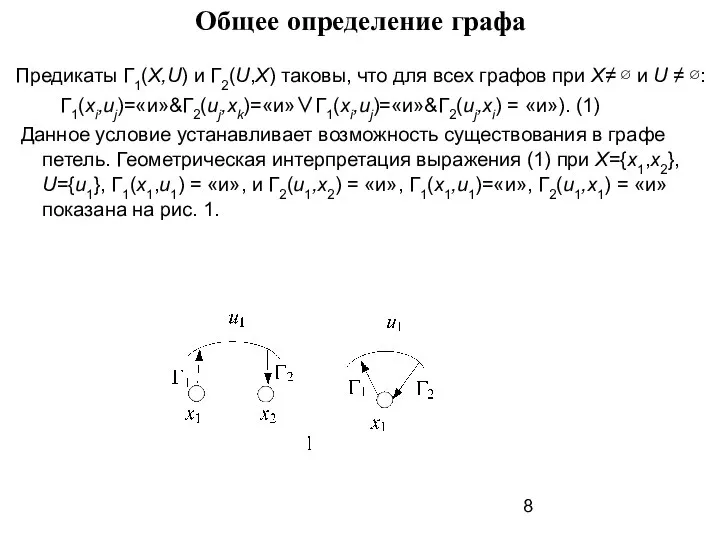
- 8. Общее определение графа Предикаты Г1(X,U) и Г2(U,X) таковы, что для всех графов при X≠ ∅ и
- 9. Виды графов Данная трактовка графов допускает существование в них петель и кратных ребер. Вид графа –
- 10. Отношения смежности На элементах множеств X и U определены также отношения смежности F1(X,X) и F2(U,U) .
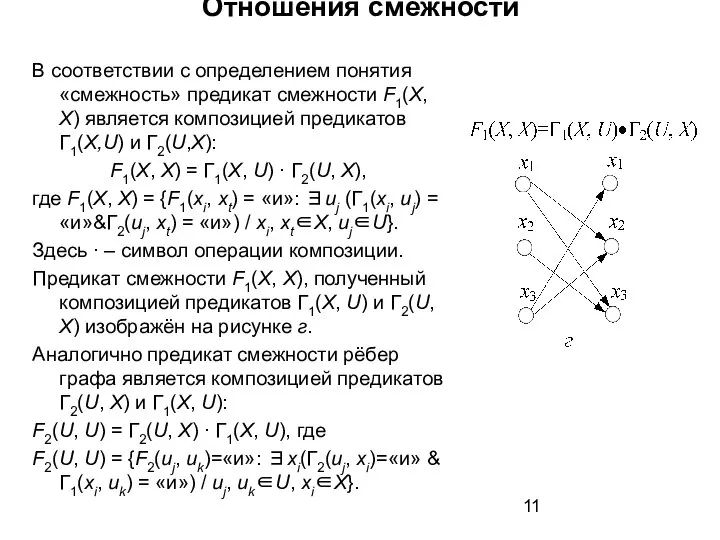
- 11. Отношения смежности В соответствии с определением понятия «смежность» предикат смежности F1(X, X) является композицией предикатов Г1(X,U)
- 12. 2.3 Предикаты-свойства Определим одноместные предикаты-свойства, производные от предикатов Г1, Г2, F1, F2 (подстановка в двуместный предикат
- 13. Предикаты-свойства зафиксировав в предикате Г2(U,X) ребро uj, придем к предикату-свойству Г2 uj(X) – «ребру uj инцидентны
- 14. Предикаты-свойства Характеристические множества рассмотренных предикатов-свойств будем обозначать через Г1xi, Г1uj, Г2uj, Г2xi, где: Г1xi =U1i ={uj
- 15. Предикаты-свойства Зафиксировав в F1(X,X) некоторую вершину xi ∈ X, получим предикат-свойство F1xi(X) – «вершине xi смежны
- 16. 2.4 Ультраграфы Определенный выше граф называется ультраграфом HU(X,U,Г1,Г2), если предикаты Г1(X,U) и Г2(U,X) обладают следующим свойством
- 17. Представление ультраграфа матрицами инцидентности Полным и достаточно наглядным способом формального задания ультраграфа является его представление через
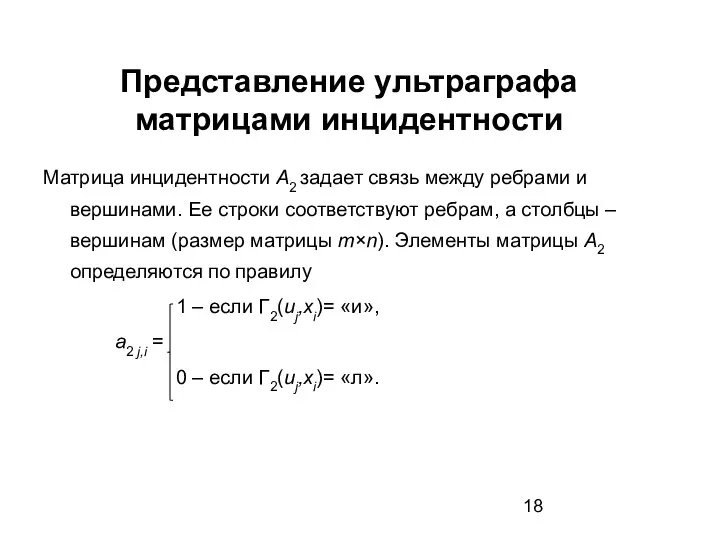
- 18. Представление ультраграфа матрицами инцидентности Матрица инцидентности А2 задает связь между ребрами и вершинами. Ее строки соответствуют
- 19. Представление ультраграфа матрицами инцидентности u1 u2 u3 x1 1 1 0 x1 x2 x3 x4 x5
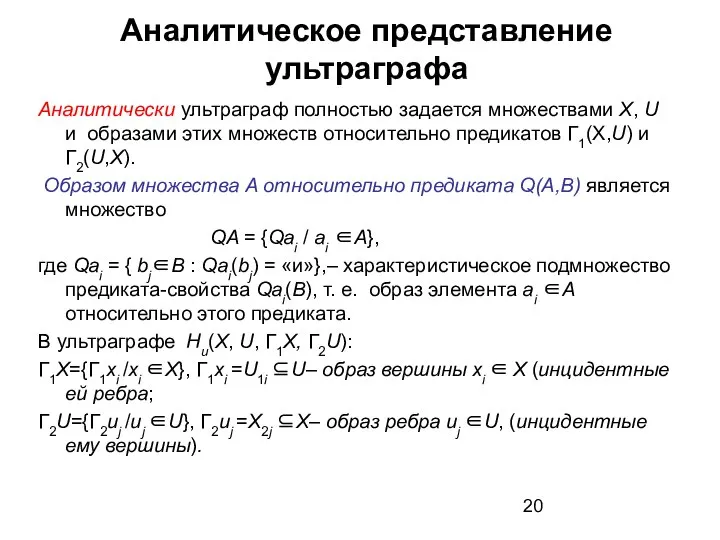
- 20. Аналитическое представление ультраграфа Аналитически ультраграф полностью задается множествами X, U и образами этих множеств относительно предикатов
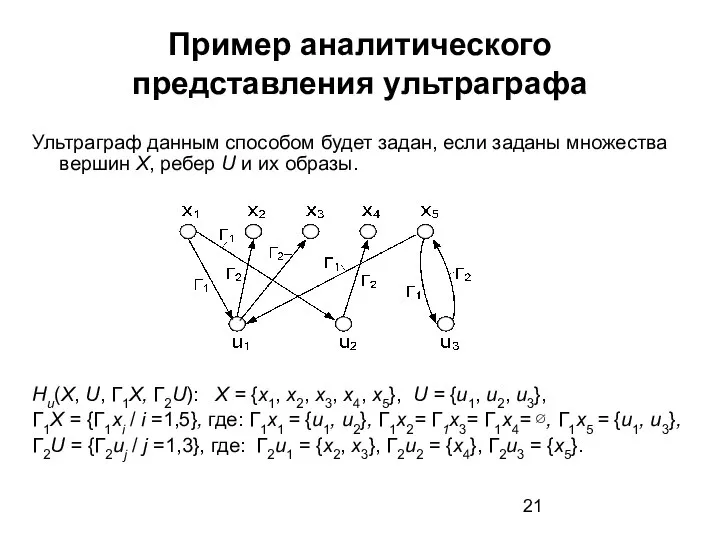
- 21. Пример аналитического представления ультраграфа Ультраграф данным способом будет задан, если заданы множества вершин X, ребер U
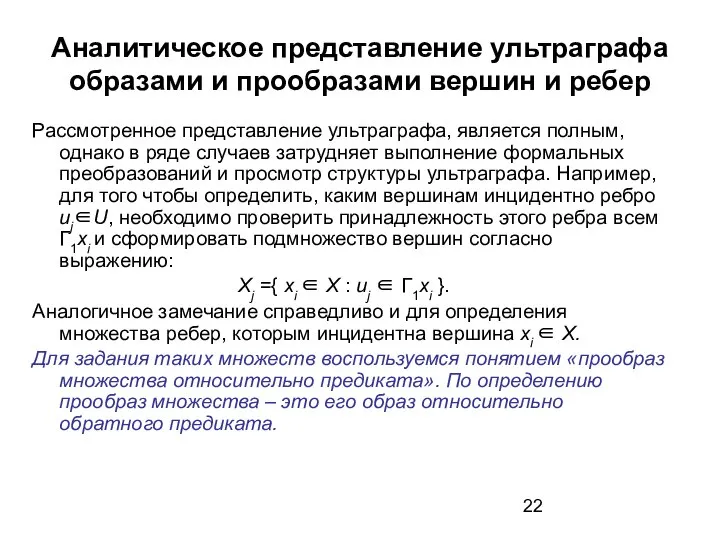
- 22. Аналитическое представление ультраграфа образами и прообразами вершин и ребер Рассмотренное представление ультраграфа, является полным, однако в
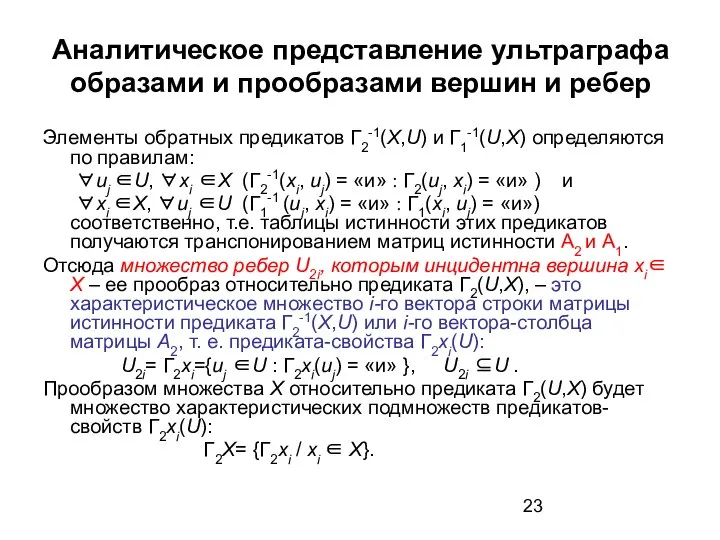
- 23. Аналитическое представление ультраграфа образами и прообразами вершин и ребер Элементы обратных предикатов Г2-1(X,U) и Г1-1(U,X) определяются
- 24. Аналитическое представление ультраграфа образами и прообразами вершин и ребер Аналогично множество вершин, которым инцидентно ребро uj
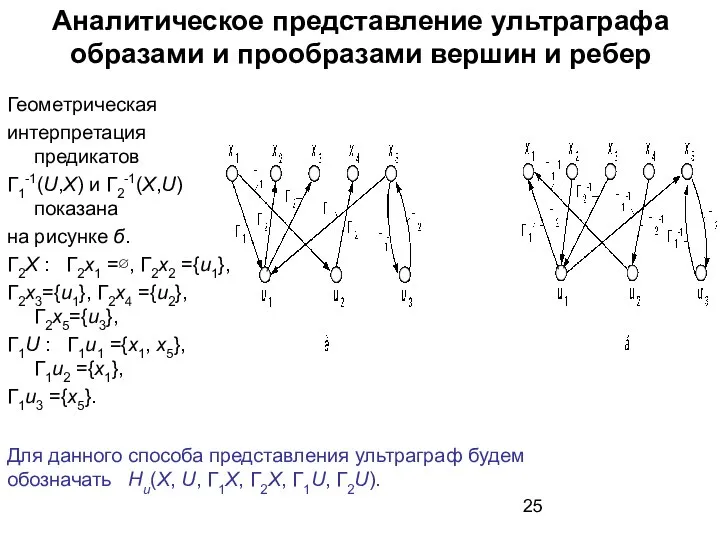
- 25. Аналитическое представление ультраграфа образами и прообразами вершин и ребер Геометрическая интерпретация предикатов Г1-1(U,X) и Г2-1(X,U) показана
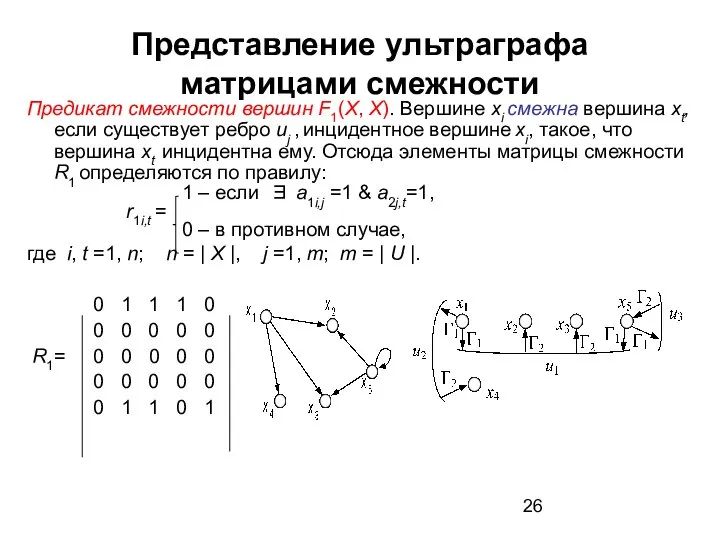
- 26. Представление ультраграфа матрицами смежности Предикат смежности вершин F1(X, X). Вершине xi смежна вершина xt, если существует
- 27. Представление ультраграфа матрицами смежности Предикат смежности ребер F2(U, U). Ребру uj смежно ребро uk, если существует
- 28. Образ и прообраз множества X относительно предиката смежности вершин F1(X, X) Образ и пробраз вершины xi–
- 29. Образ и прообраз множества U относительно предиката смежности ребер F2(U, U). Образ и прообраз ребра ui
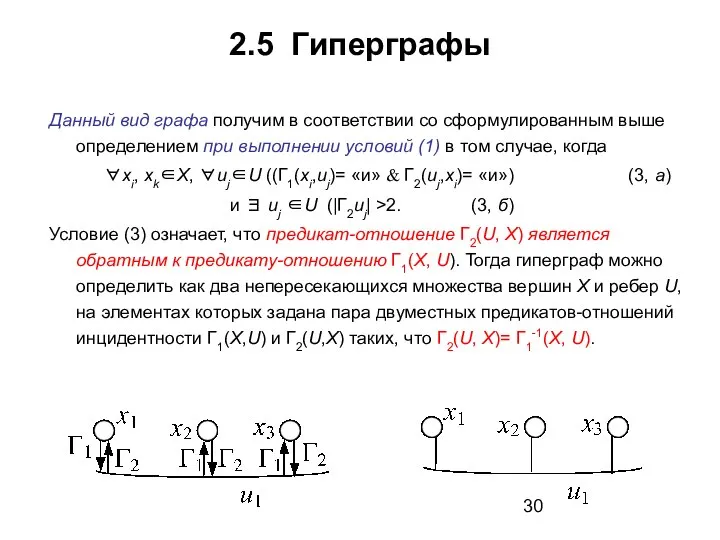
- 30. 2.5 Гиперграфы Данный вид графа получим в соответствии со сформулированным выше определением при выполнении условий (1)
- 31. Гиперграфы Вектор-строка таблицы истинности двуместного предиката-отношения Г1(X,U) – матрицы инцидентности вершины-ребра A1 совпадает с вектором-столбцом таблицы
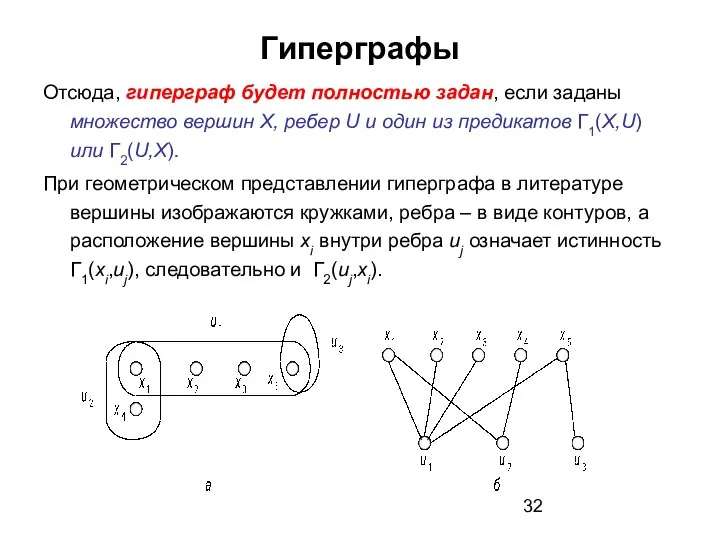
- 32. Гиперграфы Отсюда, гиперграф будет полностью задан, если заданы множество вершин X, ребер U и один из
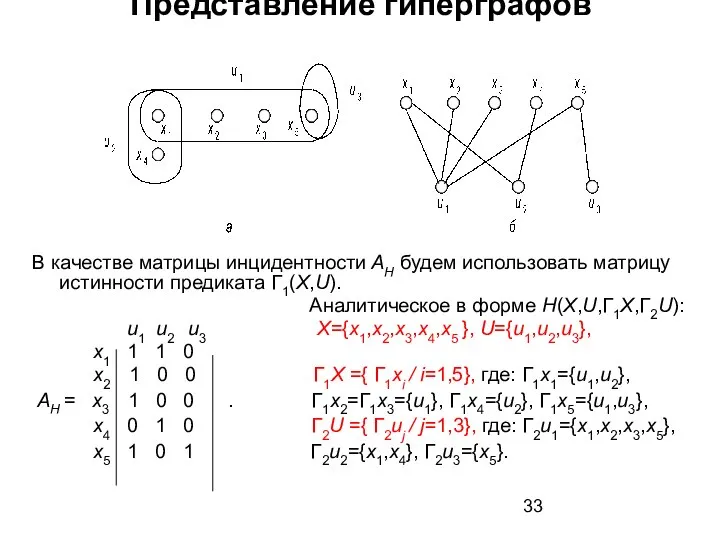
- 33. Представление гиперграфов В качестве матрицы инцидентности AH будем использовать матрицу истинности предиката Г1(X,U). Аналитическое в форме
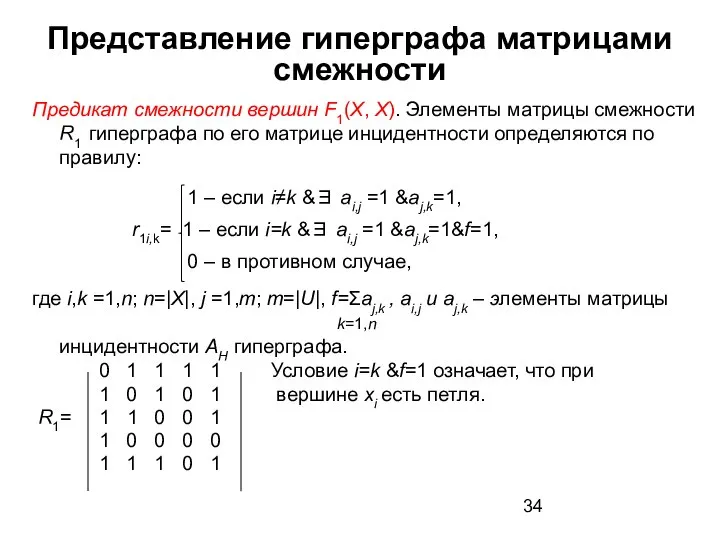
- 34. Представление гиперграфа матрицами смежности Предикат смежности вершин F1(X, X). Элементы матрицы смежности R1 гиперграфа по его
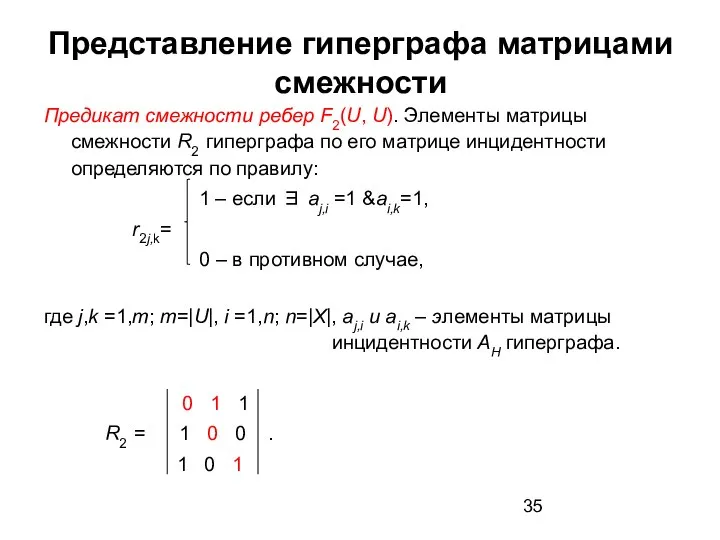
- 35. Представление гиперграфа матрицами смежности Предикат смежности ребер F2(U, U). Элементы матрицы смежности R2 гиперграфа по его
- 36. Образы вершин гиперграфа относительно предиката смежности F1 Для каждой вершины xi ∈X гиперграфа H(X, U) ее
- 37. Образы ребер гиперграфа относительно предиката смежности F2 Образ F2uj ребра uj∈U гиперграфа H(X, U) относительно предиката
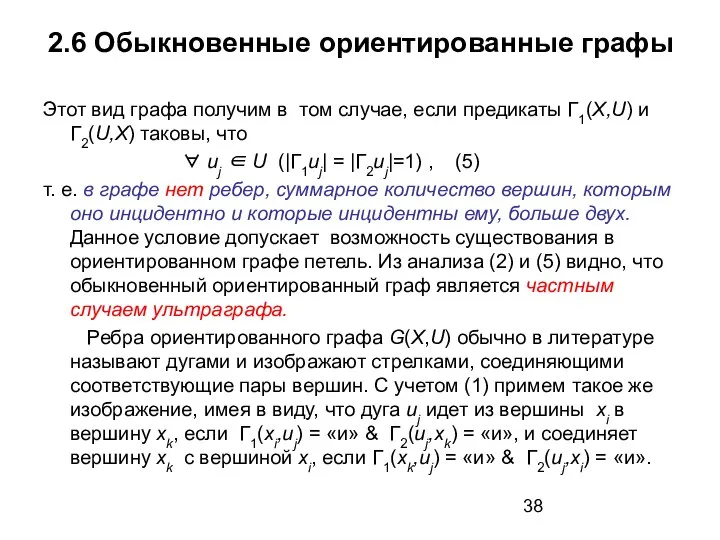
- 38. 2.6 Обыкновенные ориентированные графы Этот вид графа получим в том случае, если предикаты Г1(X,U) и Г2(U,X)
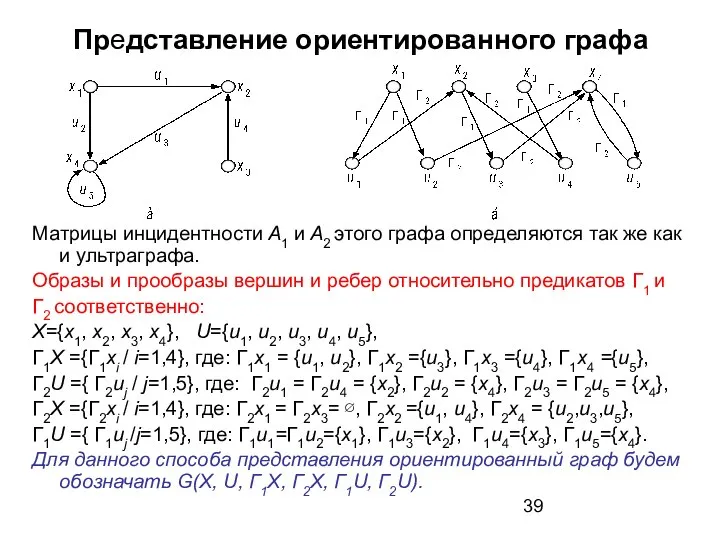
- 39. Представление ориентированного графа Матрицы инцидентности A1 и A2 этого графа определяются так же как и ультраграфа.
- 40. Смежность вершин и ребер ориентированного графа Для ориентированного графа элементы матриц смежности вершин R1 и ребер
- 41. 1.2.6. Обыкновенные неориентированные графы Неориентированный граф можно определить как два непересекающихся множества вершин X и ребер
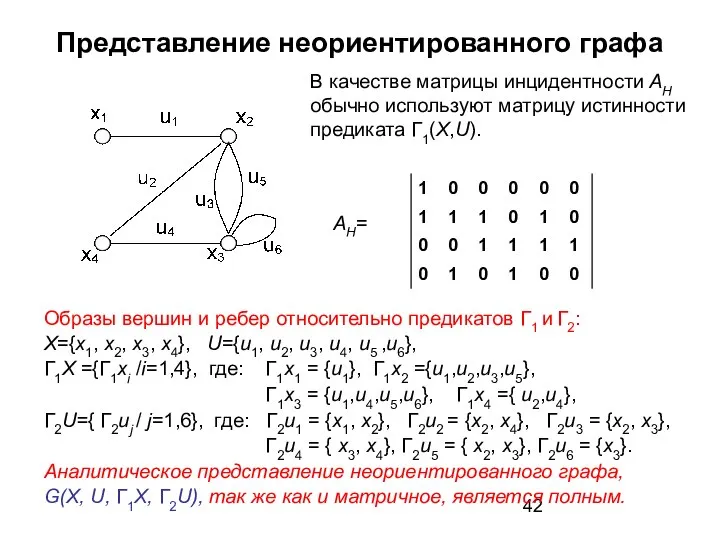
- 42. Представление неориентированного графа Образы вершин и ребер относительно предикатов Г1 и Г2: X={x1, x2, x3, x4},
- 43. Смежность вершин и ребер неориентированного графа Для неориентированного графа элементы матриц смежности вершин R1 и ребер
- 44. 2.8 Характеристики вершин и ребер графов Характеристики вершин ультра- и ориентированного графа : ρ+(xi) – полустепень
- 45. Характеристики вершин и ребер графов Характеристики ребер ультра- и ориентированного графа : A+(uj) – количество вершин,
- 46. Характеристики вершин и ребер графов Характеристики вершин гипер- и неориентированного графа : ρ(xi) –локальная степень вершины,
- 47. 2.9 Некоторые особенные графы Конечный, пустой и смешанный графы. Граф G(X,U) называется конечным, если число его
- 48. Полный и однородный неориентированный графы Количество ребер неориентированного графа определяется через локальные степени вершин как: n
- 49. Полный ориентированный граф Количество ребер ориентированного графа n n r = Σ ρ+(xi) или r =
- 50. Двудольный граф (граф Кенига) Граф называется двудольным или графом Кенига, если его множество вершин Х распадается
- 51. Мультиграф Граф, у которого хотя бы для двух ребер uj,ul∈U справедливо Г2uj= Г2ul& Г1uj= Г1ul, называется
- 52. Маршрут, цепь, цикл Последовательность смежных ребер неориентированного графа без петель и кратных ребер называется маршрутом. В
- 53. Эйлеров и гамильтонов циклы Цикл, включающий все ребра графа, называется эйлеровым. Связный граф содержит эйлеров цикл,
- 54. Связность графа Две вершины xi, xj∈X называются связанными, если в графе G(X,U) существует маршрут S =
- 55. Деревья Связный граф, не имеющий циклов, называется деревом. Начальная вершина дерева называется корнем, выходящие из него
- 56. Части графа Граф Gi(Xi,Ui) называется частью графа G(X,U), если он находится в отношении включения к нему
- 57. Минимальные массивы Множество Xi вершин куска Hi(Xi,Ui) гиперграфа H(X,U) называется минимальным массивом, если удаление из него
- 58. 2.10 Представление структур сложных систем графами Для перехода от объектов задач структурного синтеза к их математическим
- 59. Представление структур сложных систем графами задать способ отображения свойств и характеристик компонент объекта в характеристики графа
- 60. 2.10.1 Представление схемы ультраграфом Ультраграф является универсальной (обобщенной) моделью, так как позволяет в общем случае отобразить
- 61. Представление схемы ультраграфом Для этих задач адекватность математической модели объекту следует рассматривать в смысле полноты и
- 62. Представление схемы ультраграфом При разработке математической модели системы в общем случае будем рассматривать множества подсистем (компонентов)
- 63. Представление схемы ультраграфом Адекватность ультраграфа как структурной модели в указанных выше условиях обеспечивается следующими правилами перехода:
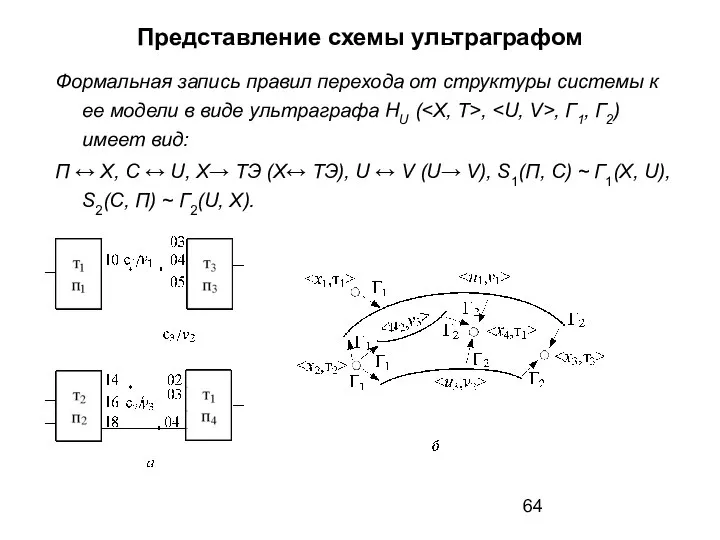
- 64. Представление схемы ультраграфом Формальная запись правил перехода от структуры системы к ее модели в виде ультраграфа
- 65. Представление схемы ультраграфом Информации о номерах выводов подсистемы и времени распространения сигнала от подсистемы-источника до каждого
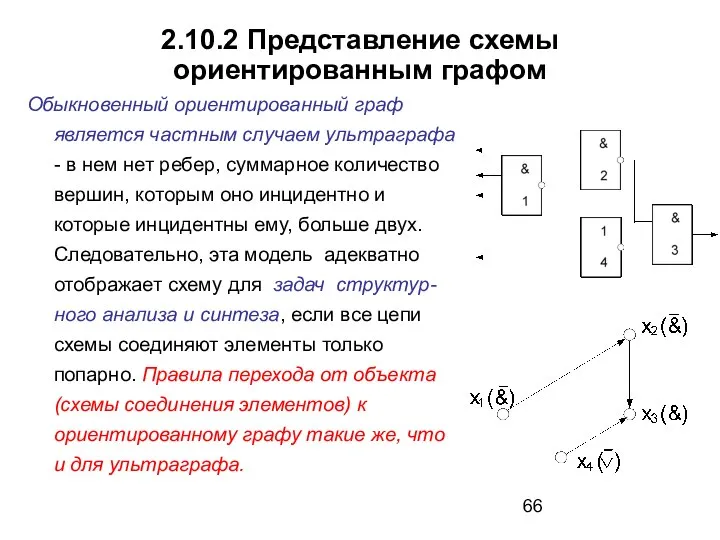
- 66. 2.10.2 Представление схемы ориентированным графом Обыкновенный ориентированный граф является частным случаем ультраграфа - в нем нет
- 67. 2.10.4 Представление структуры объекта гиперграфом и неориентированным графом В соответствии с характерными особенностями задач декомпозиции/композиции, размещения,
- 68. Представление структуры объекта гиперграфом и неориентированным графом Для решения указанных задач в математической модели системы должна
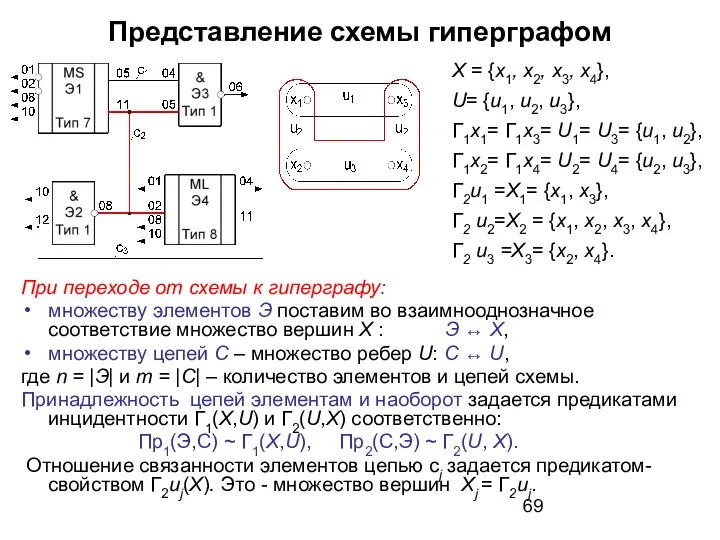
- 69. Представление схемы гиперграфом При переходе от схемы к гиперграфу: множеству элементов Э поставим во взаимнооднозначное соответствие
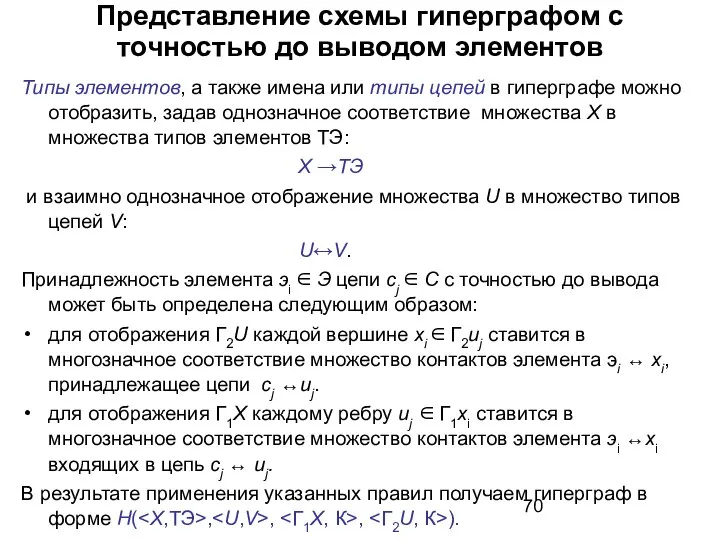
- 70. Представление схемы гиперграфом с точностью до выводом элементов Типы элементов, а также имена или типы цепей
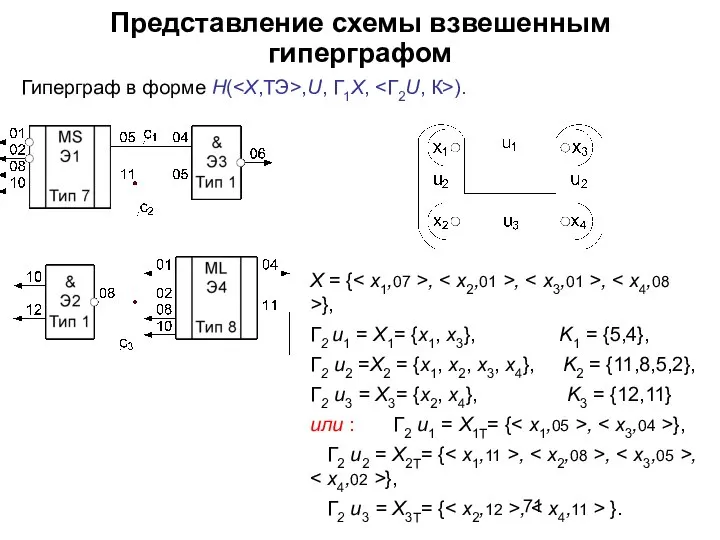
- 71. Представление схемы взвешенным гиперграфом Гиперграф в форме H( ,U, Г1X, ). X = { , ,
- 72. Определение связности элементов по гиперграфу Для того, чтобы определить, соединены ли элементы эi и эk с
- 73. Представление схемы неориентированным графом Такая модель, как правило, используется для задач коммутации. В ней необходимо отобразить:
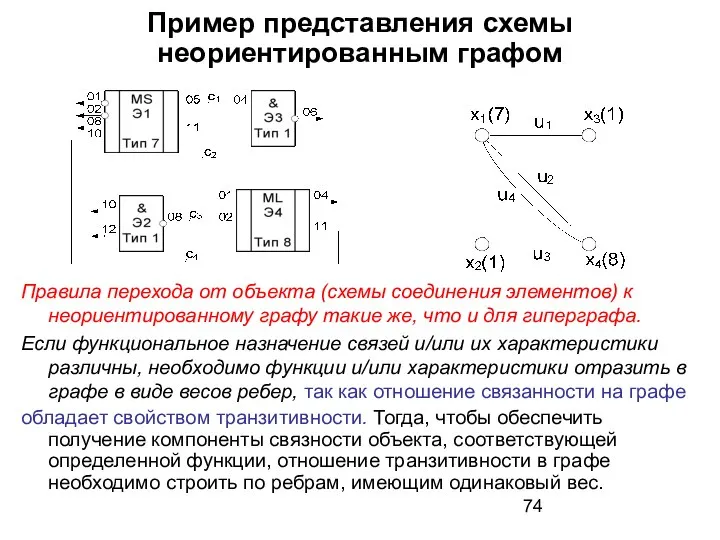
- 74. Пример представления схемы неориентированным графом Правила перехода от объекта (схемы соединения элементов) к неориентированному графу такие
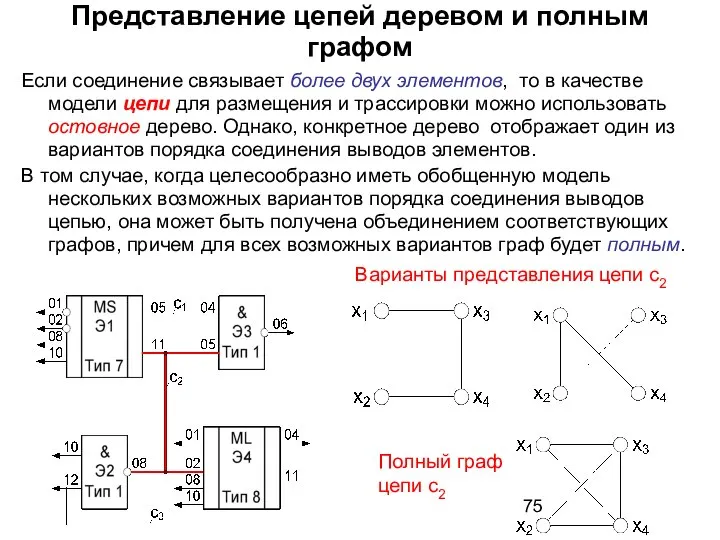
- 75. Представление цепей деревом и полным графом Если соединение связывает более двух элементов, то в качестве модели
- 76. 2.10.5 Математические модели монтажного пространства Математические модели монтажного пространства используются для задач размещения и трассировки. Сущность
- 77. Математические модели монтажного пространства В качестве математической модели монтажного пространства используется неориентированный граф решетки Gr. Каждую
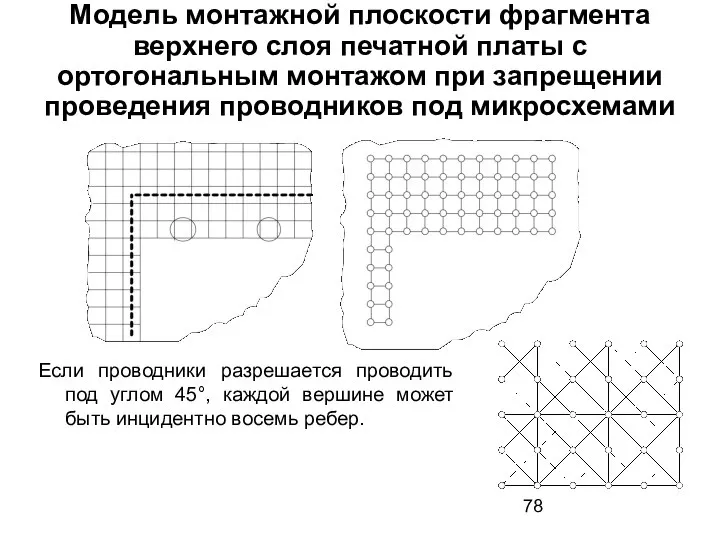
- 78. Модель монтажной плоскости фрагмента верхнего слоя печатной платы с ортогональным монтажом при запрещении проведения проводников под
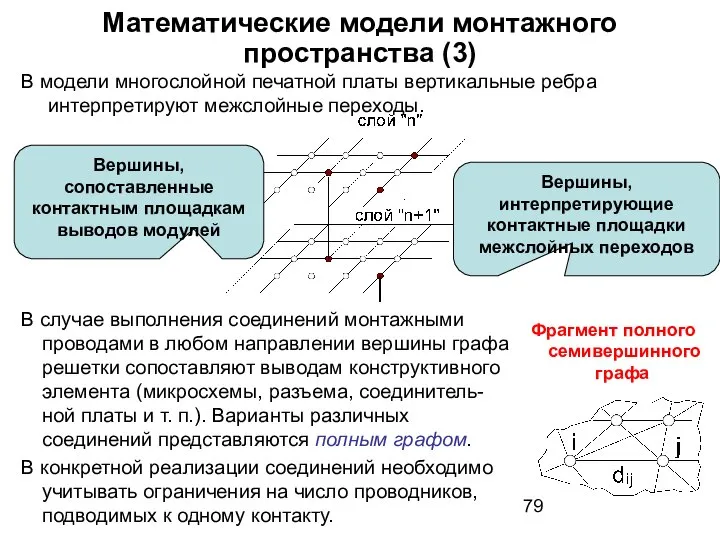
- 79. Математические модели монтажного пространства (3) В модели многослойной печатной платы вертикальные ребра интерпретируют межслойные переходы. Вершины,
- 80. Математические модели монтажного пространства (4) Расстояние между i-м и j-м узлами графа решетки в общем случае
- 81. Приближенный подсчет суммарной длины соединений между модулями Пусть моделью схемы соединений является неориентированный мультиграф G с
- 82. 2.11 Математические модели структур данных Отображение данных в память ЭВМ требует реализации содержа-тельных связей между их
- 83. Требования к моделям структур данных Эти модели должны: – обеспечивать реализацию операций над данными соответствующими операциями
- 84. Требования к моделям структур данных Таким образом в модели необходимо отобразить следующую информацию о структуре данных:
- 85. Выбор или разработка структур данных Полный анализ применимости различных структур данных должен включать оценку вычислительной и
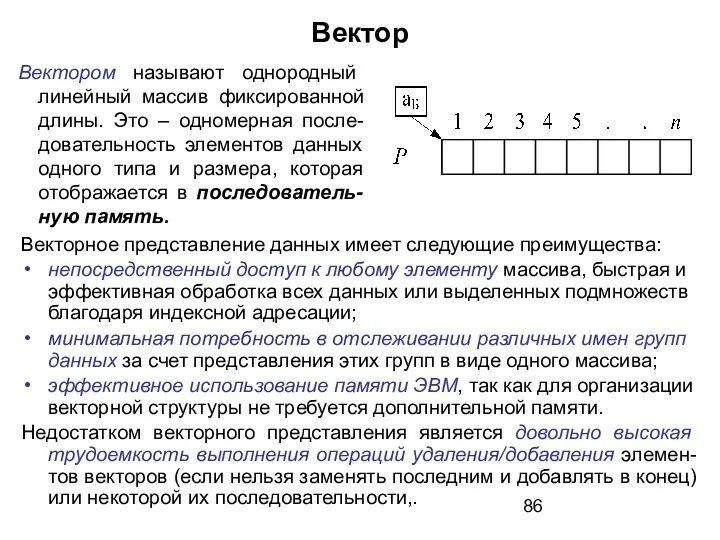
- 86. Вектор Векторное представление данных имеет следующие преимущества: непосредственный доступ к любому элементу массива, быстрая и эффективная
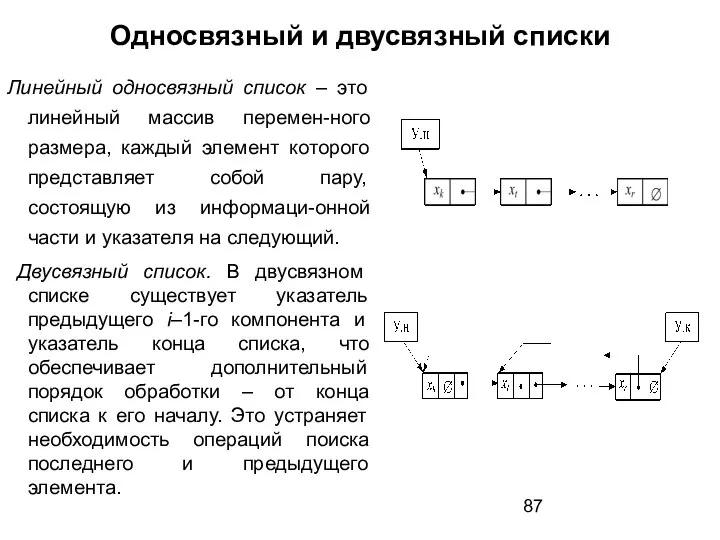
- 87. Односвязный и двусвязный списки Линейный односвязный список – это линейный массив перемен-ного размера, каждый элемент которого
- 88. Односвязный и двусвязный списки Для списковых структур характерны следующие преимущества: - низкая трудоемкость выполнения операций удаления/добавления
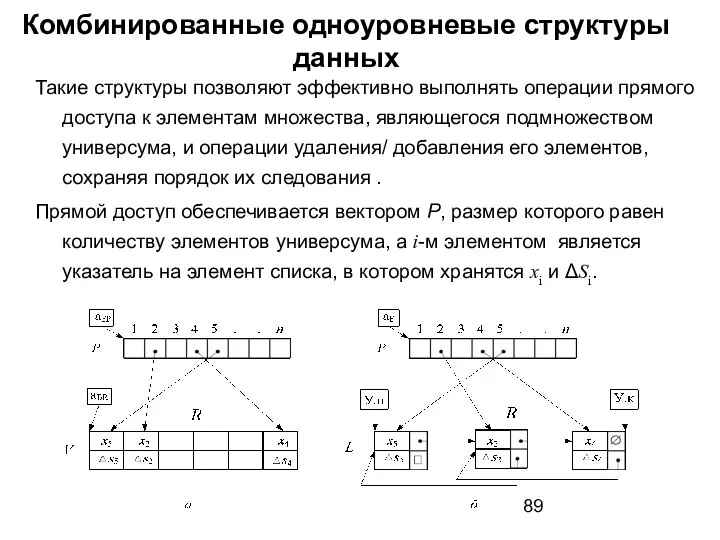
- 89. Комбинированные одноуровневые структуры данных Такие структуры позволяют эффективно выполнять операции прямого доступа к элементам множества, являющегося
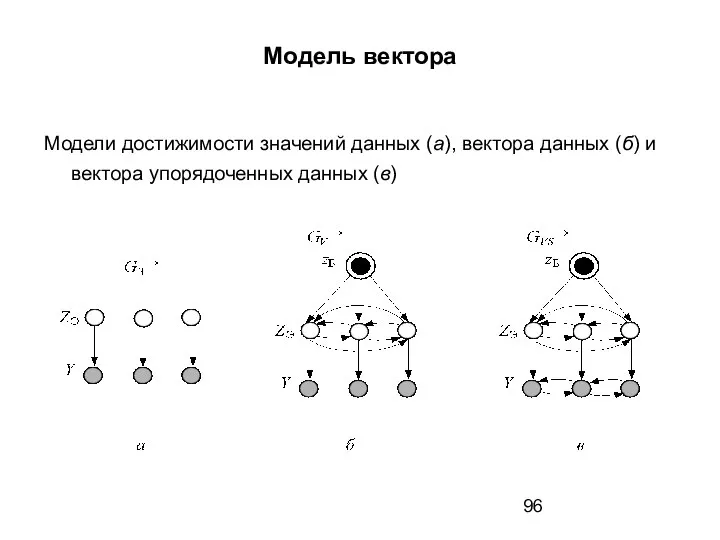
- 90. Модель вектора Основными компонентами вектора данных как непрерывной последовательности элементов памяти, являются множество адресов элементов –
- 91. Модель вектора Возможность непосредственного доступа к элементам памяти определяет свойство достижимости адресов множества AЭ из адреса
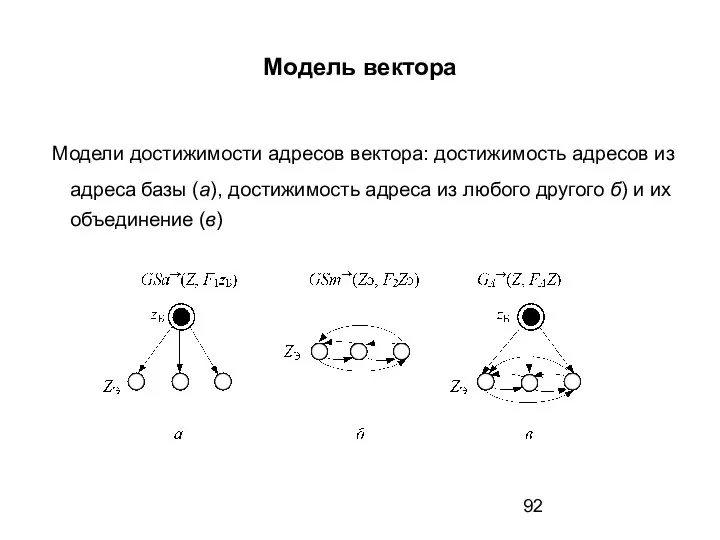
- 92. Модель вектора Модели достижимости адресов вектора: достижимость адресов из адреса базы (а), достижимость адреса из любого
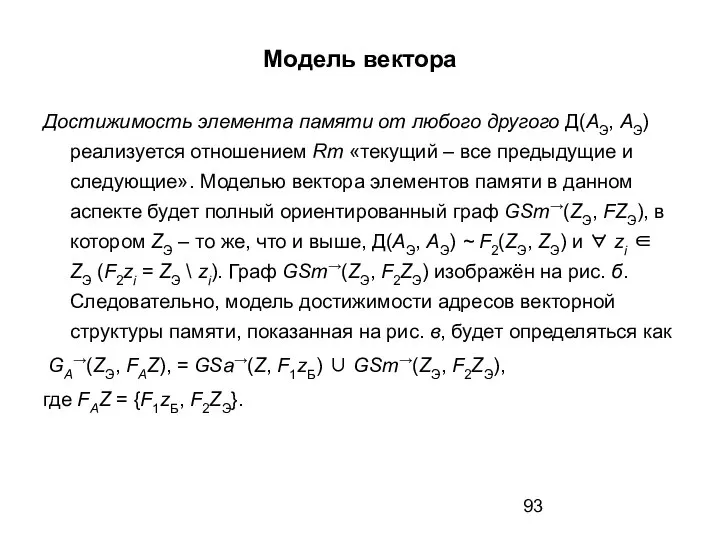
- 93. Модель вектора Достижимость элемента памяти от любого другого Д(AЭ, AЭ) реализуется отношением Rm «текущий – все
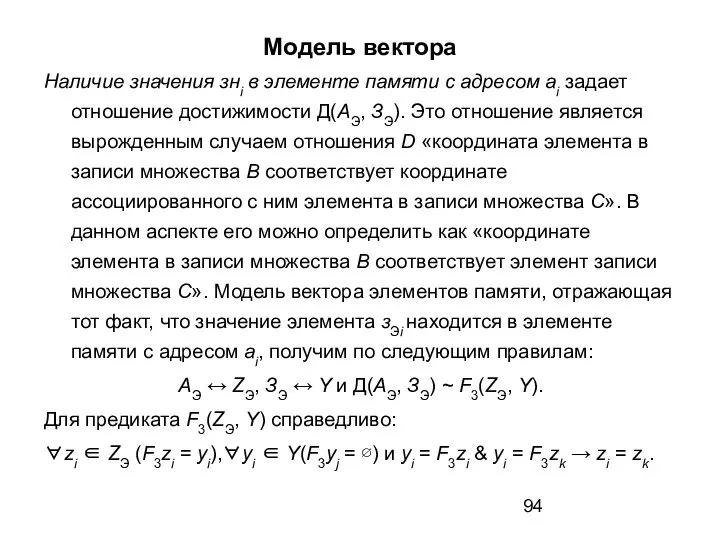
- 94. Модель вектора Наличие значения знi в элементе памяти с адреcом аi задает отношение достижимости Д(АЭ, ЗЭ).
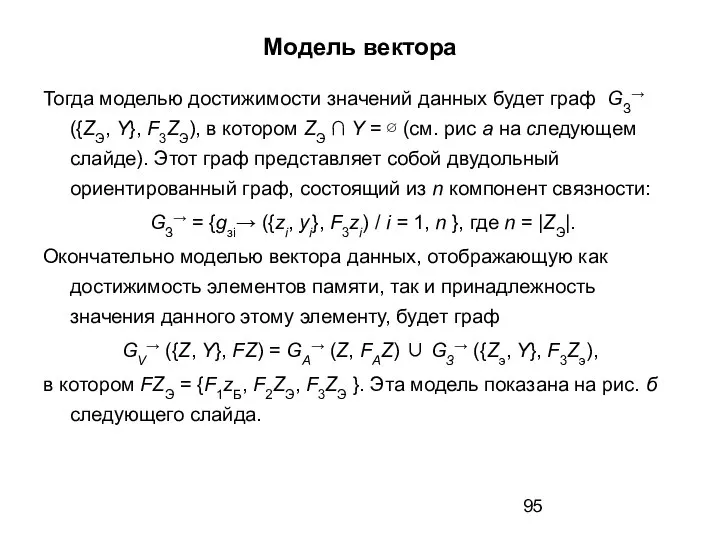
- 95. Модель вектора Тогда моделью достижимости значений данных будет граф GЗ→({ZЭ, Y}, F3ZЭ), в котором ZЭ ∩
- 96. Модель вектора Модели достижимости значений данных (а), вектора данных (б) и вектора упорядоченных данных (в)
- 97. Модель двусвязного списка Переход от списковой структуры к его модели в виде ориентированного графа проиллюстрируем на
- 98. Модель двусвязного списка адресам элементов списка AЭ – вершины множества ZЭD, значениям элементов данных ЗЭ –
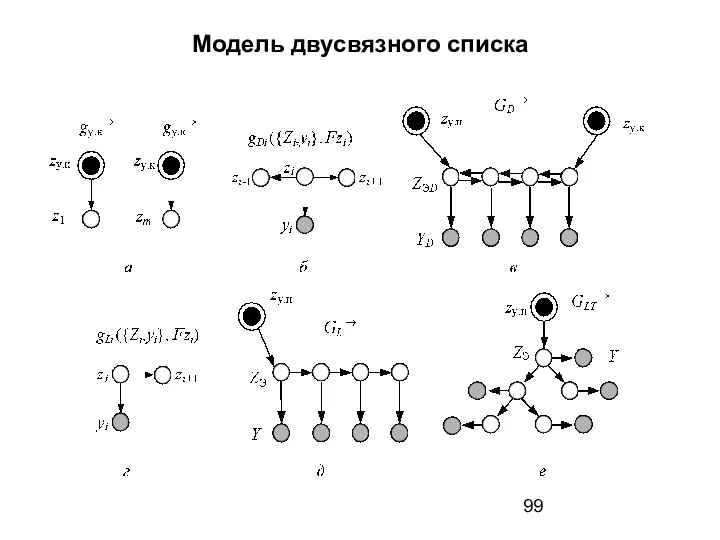
- 99. Модель двусвязного списка
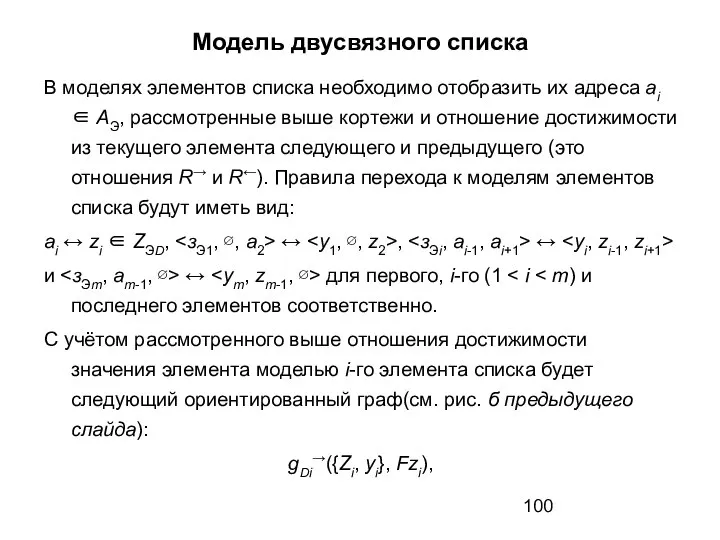
- 100. Модель двусвязного списка В моделях элементов списка необходимо отобразить их адреса аi ∈ AЭ, рассмотренные выше
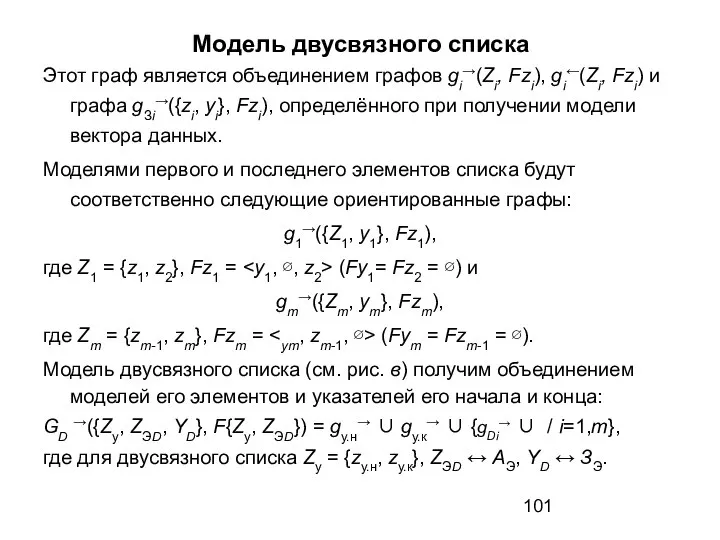
- 101. Модель двусвязного списка Этот граф является объединением графов gi→(Zi, Fzi), gi←(Zi, Fzi) и графа gЗi→({zi, yi},
- 102. Модель комбинированной одноуровневой структуры Рассматриваемая структура предназначена для обеспечения вычислительной сложности равной 1 операции добавления/удаления и
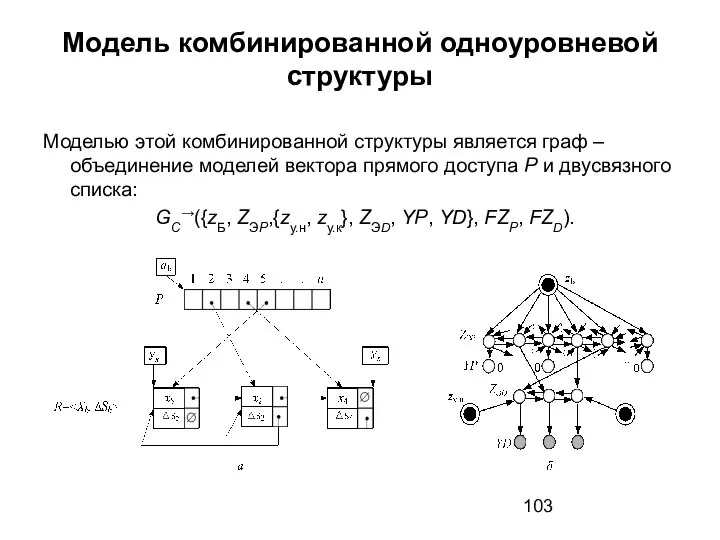
- 103. Модель комбинированной одноуровневой структуры Моделью этой комбинированной структуры является граф – объединение моделей вектора прямого доступа
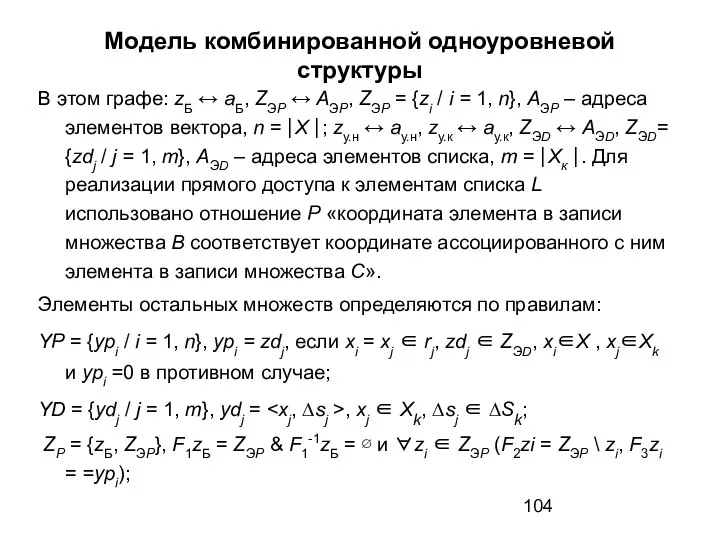
- 104. Модель комбинированной одноуровневой структуры В этом графе: zБ ↔ аБ, ZЭP ↔ AЭP, ZЭP = {zi
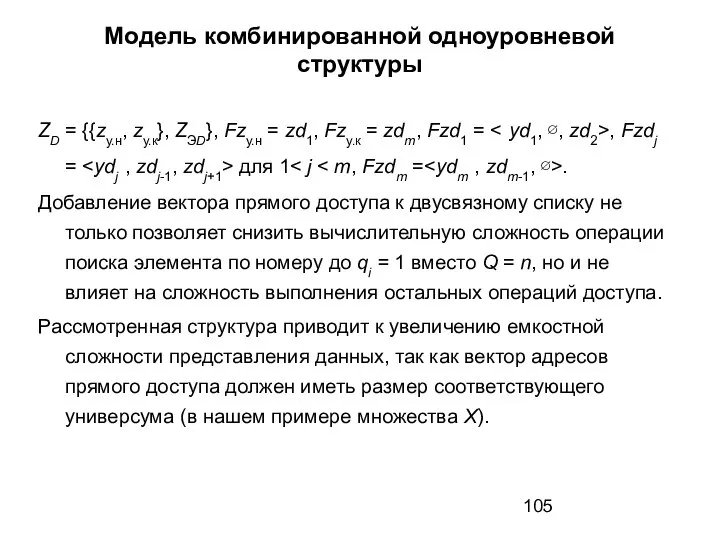
- 105. Модель комбинированной одноуровневой структуры ZD = {{zу.н, zу.к}, ZЭD}, Fzу.н = zd1, Fzу.к = zdm, Fzd1
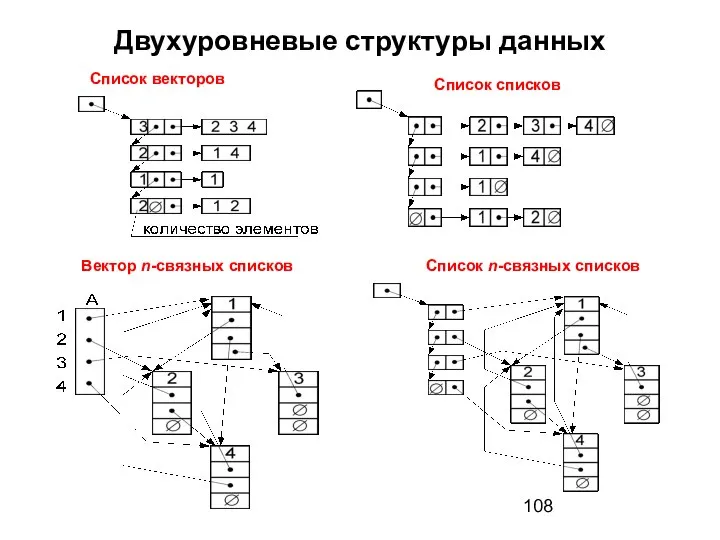
- 106. Двухуровневые структуры данных Представление графов множествами вершин, рёбер и их образов (прообразов) требуют организации двухуровневых структур,
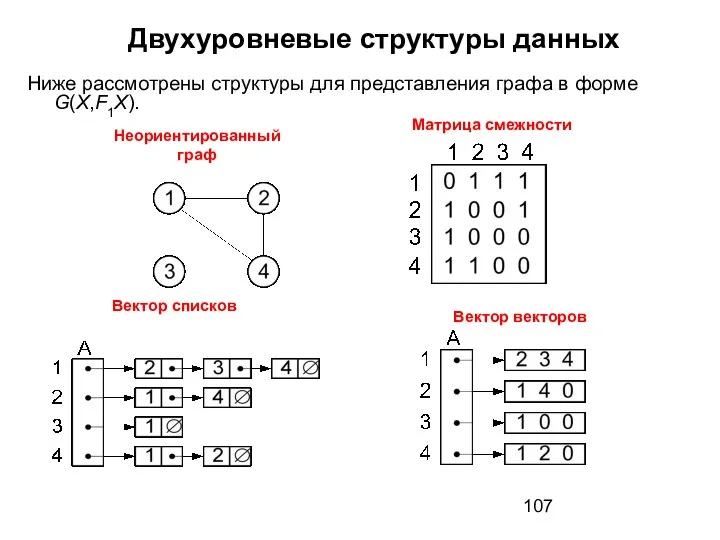
- 107. Двухуровневые структуры данных Ниже рассмотрены структуры для представления графа в форме G(X,F1X). Неориентированный граф Матрица смежности
- 108. Двухуровневые структуры данных Список векторов Список списков Вектор n-связных списков Список n-связных списков
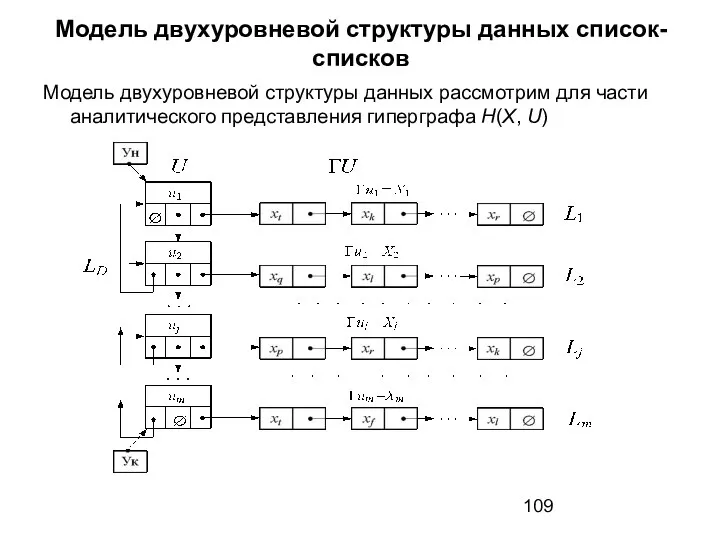
- 109. Модель двухуровневой структуры данных список-списков Модель двухуровневой структуры данных рассмотрим для части аналитического представления гиперграфа H(X,
- 110. Модель двухуровневой структуры данных список-списков В данной структуре хранятся два вида данных: множество ребер U и
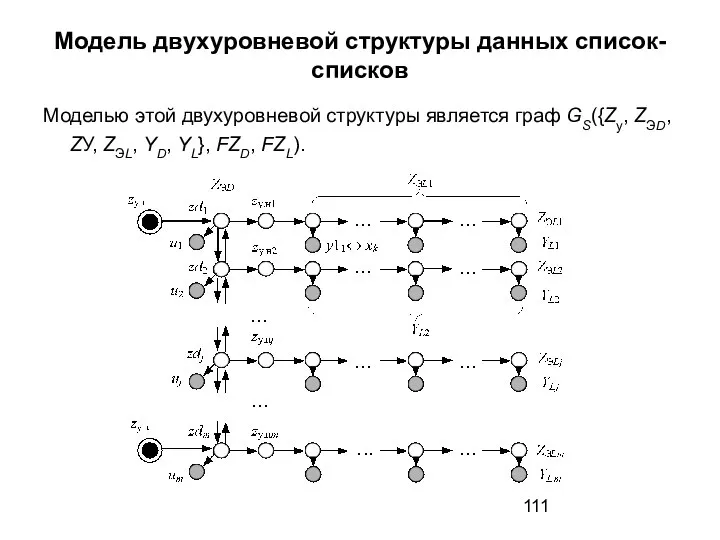
- 111. Модель двухуровневой структуры данных список-списков Моделью этой двухуровневой структуры является граф GS({Zу, ZЭD, ZУ, ZЭL, YD,
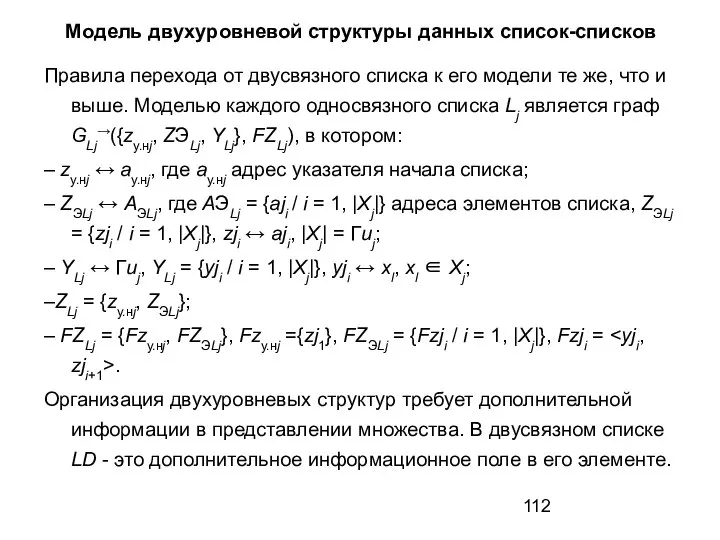
- 112. Модель двухуровневой структуры данных список-списков Правила перехода от двусвязного списка к его модели те же, что
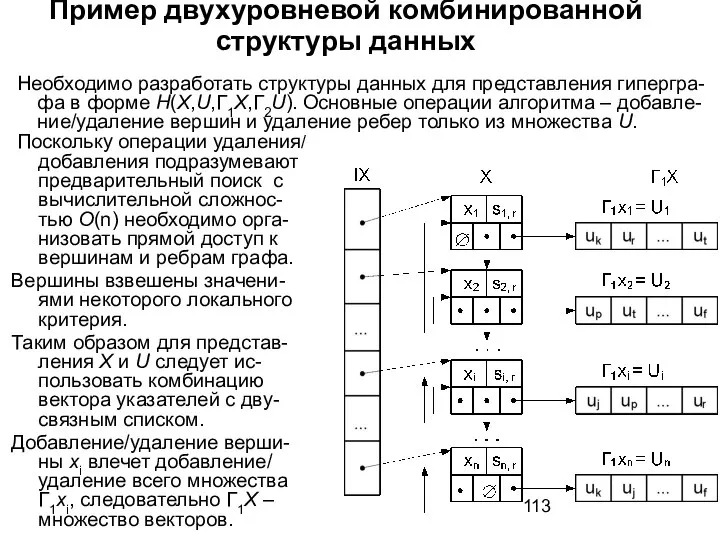
- 113. Пример двухуровневой комбинированной структуры данных добавления подразумевают предварительный поиск с вычислительной сложнос-тью O(n) необходимо орга-низовать прямой
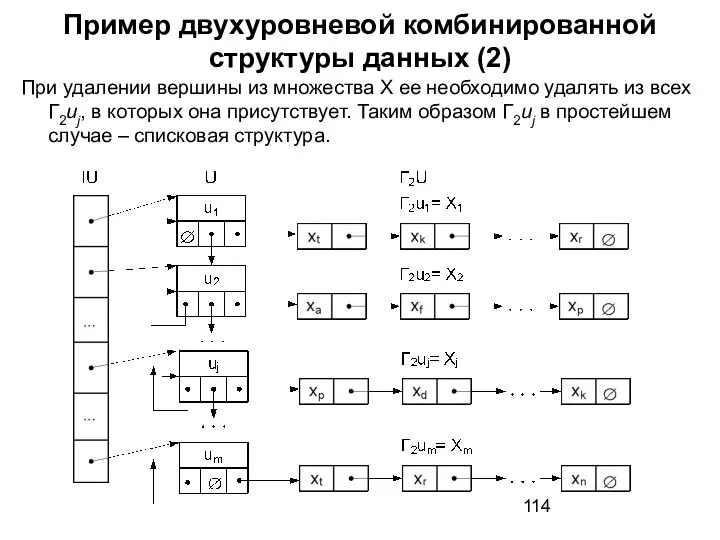
- 114. Пример двухуровневой комбинированной структуры данных (2) При удалении вершины из множества X ее необходимо удалять из
- 115. Пример двухуровневой комбинированной структуры данных (3) В разработанной выше структуре поиск xi в Г2U требует максимум
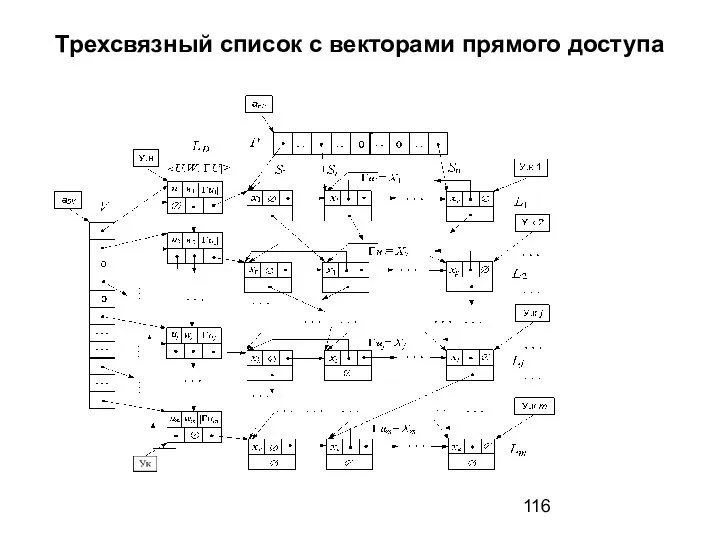
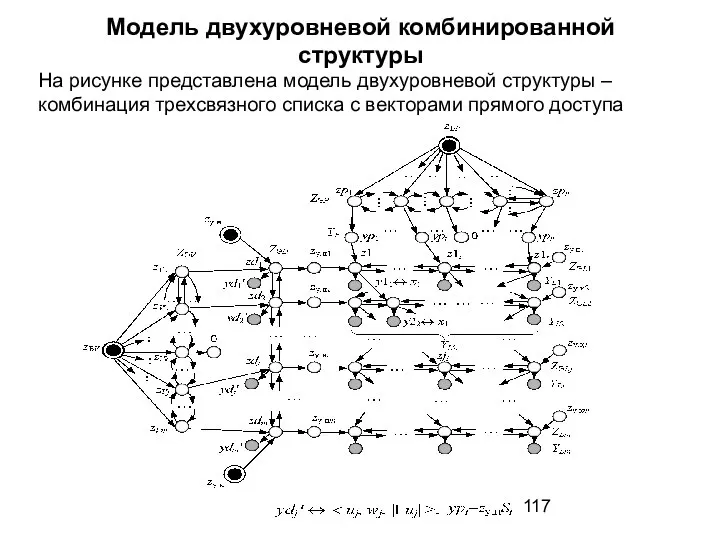
- 116. Трехсвязный список с векторами прямого доступа
- 117. Модель двухуровневой комбинированной структуры На рисунке представлена модель двухуровневой структуры – комбинация трехсвязного списка с векторами
- 118. 2.12 Математическая модель алгоритма Для автоматизации анализа вычислительной и емкостной сложности, а также выполнения оптимизирующих преобразований
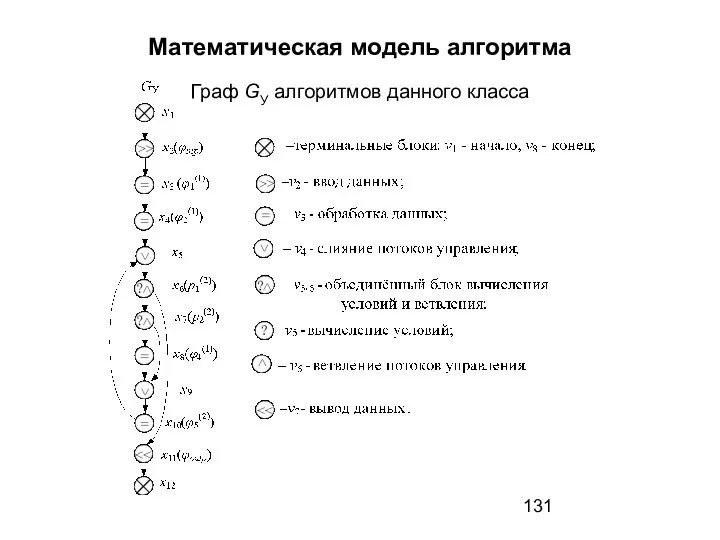
- 119. Математическая модель алгоритма Элементарный базис логической структуры алгоритма составляют операторы: начала и конца работы алгоритма; ввода/вывода
- 120. Математическая модель алгоритма Помимо операций и их связей, компонентами алгоритма, отражающими процедурный подход, являются входные и
- 121. Математическая модель алгоритма В математической модели должны быть отражены следующие компоненты алгоритма, связи между ними, характеристики
- 122. Математическая модель алгоритма 6) связи данные – операторы и наоборот, их типы, определяющие вычислительную сложность чтения-записи
- 123. Математическая модель алгоритма Моделью алгоритмов данного класса является управляющий граф, в котором не отражены конкретные наборы
- 124. Математическая модель алгоритма События передачи управления порождают отношения достижимости оператор – оператор, обозначим его Д1(О, О).
- 125. Математическая модель алгоритма 2. Тип и вычислительную сложность оператора отобразим, задав однозначное (возможно, взаимно однозначное) отношения
- 126. Математическая модель алгоритма 5. Отношения П1(O, С) – «управление передаётся от оператора» и П2(С, O) –
- 127. Математическая модель алгоритма 8. Вершинам прообразов F1-1xi вершин разветвления потока управления, присвоим аналогичные веса: xi R7
- 128. Математическая модель алгоритма На рисунке следующего слайда показаны схемы алгоритмов программ: А1 – определения номера последнего
- 129. Математическая модель алгоритма Схемы алгоритмов
- 130. Математическая модель алгоритма На рис. в: DB ={di /i = 1,6}, где di – символы данных;
- 131. Математическая модель алгоритма Граф GУ алгоритмов данного класса
- 132. Математическая модель алгоритма Вторая компонента модели алгоритма должна отображать отношения данные – операторы, разделяя для каждого
- 133. Математическая модель алгоритма Тогда вторая модель алгоритма будет представлять собой двудольный граф, множество вершин которого Z
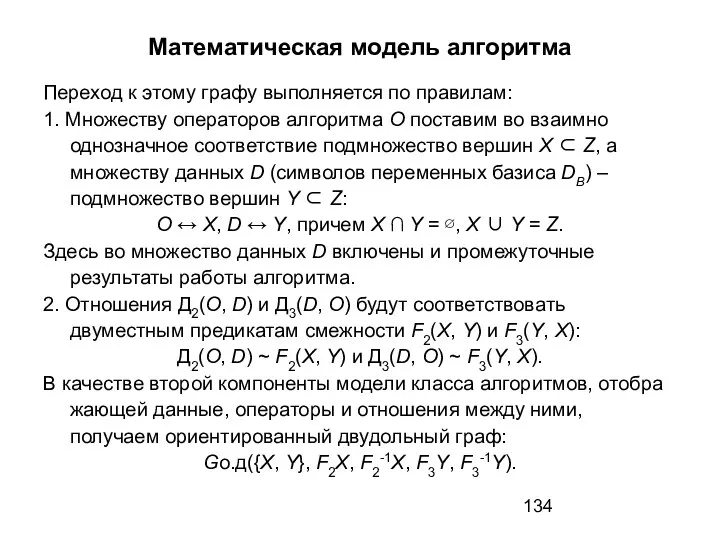
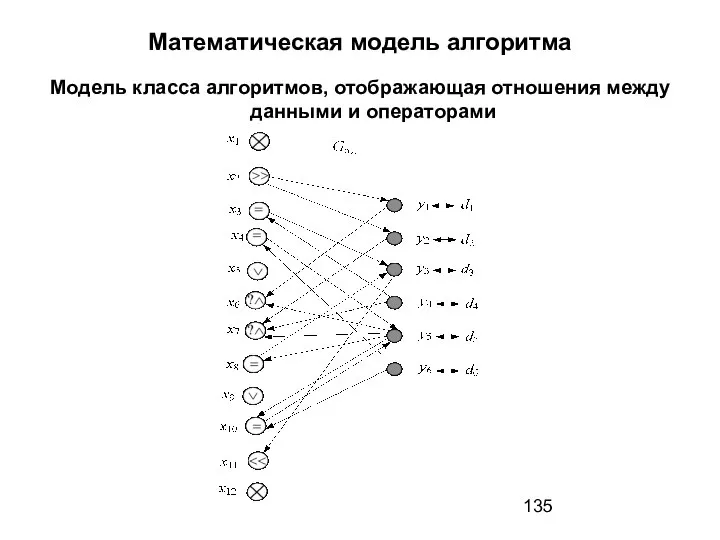
- 134. Математическая модель алгоритма Переход к этому графу выполняется по правилам: 1. Множеству операторов алгоритма О поставим
- 135. Математическая модель алгоритма Модель класса алгоритмов, отображающая отношения между данными и операторами
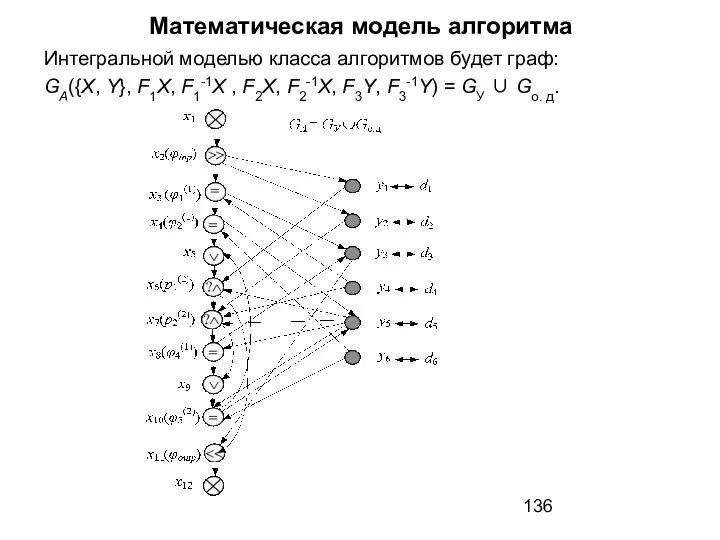
- 136. Математическая модель алгоритма Интегральной моделью класса алгоритмов будет граф: GA({X, Y}, F1Х, F1-1Х , F2Х, F2-1Х,
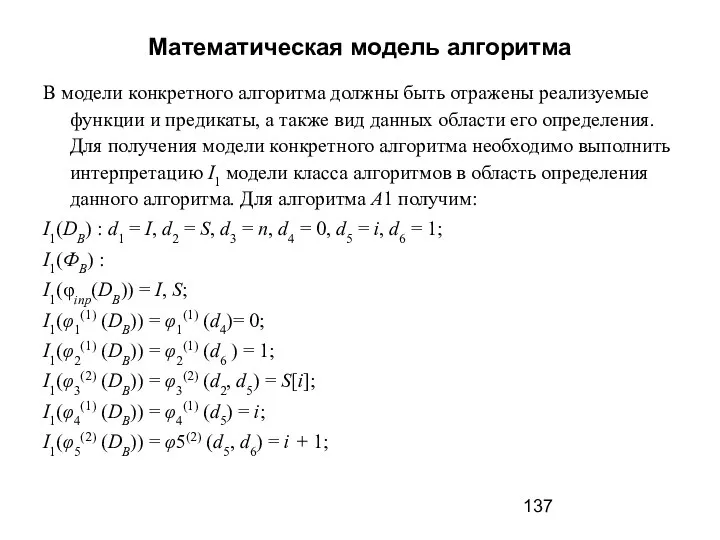
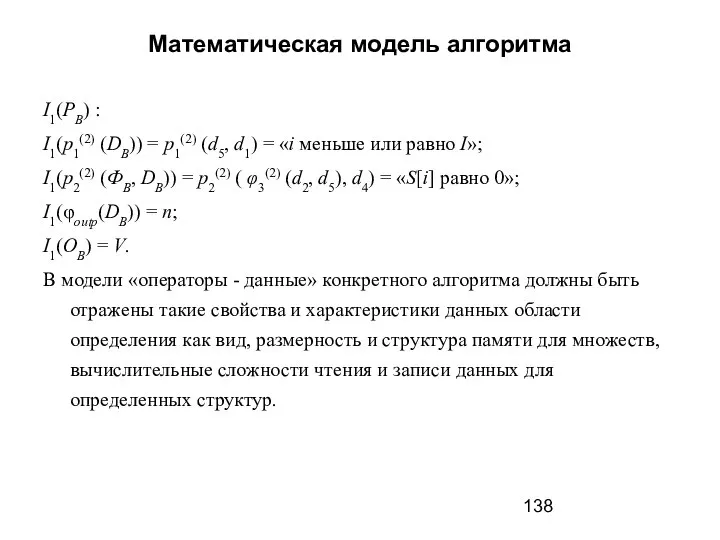
- 137. Математическая модель алгоритма В модели конкретного алгоритма должны быть отражены реализуемые функции и предикаты, а также
- 138. Математическая модель алгоритма I1(PB) : I1(p1(2) (DB)) = p1(2) (d5, d1) = «i меньше или равно
- 139. 2.13 Модель сети Неформально сеть можно определить следующим образом: имеется система, состоящая из некоторого множества объектов,
- 141. Скачать презентацию
2.1 Требования к математическим моделям
С точки зрения возможности и эффективности
2.1 Требования к математическим моделям
С точки зрения возможности и эффективности
Требования к математическим моделям
Правила перехода устанавливают соответствия между
компонентами объекта и элементами
Требования к математическим моделям
Правила перехода устанавливают соответствия между
компонентами объекта и элементами
Математические модели объектов
«В виде графов можно представлять блок-схемы программ
Математические модели объектов
«В виде графов можно представлять блок-схемы программ
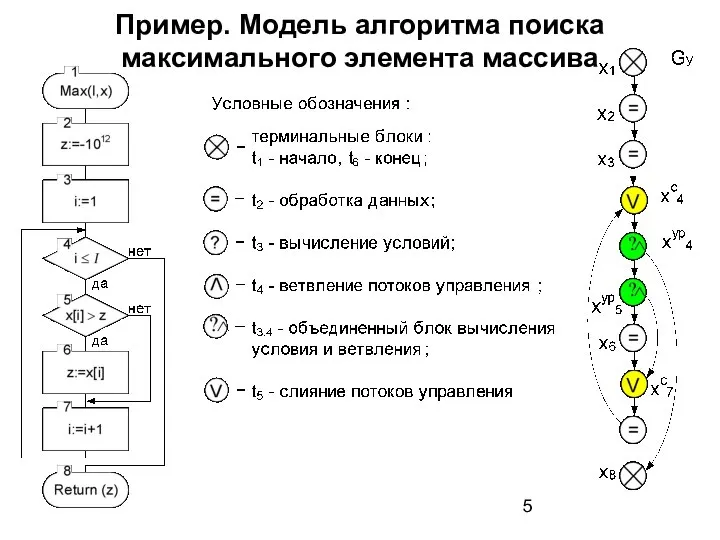
Пример. Модель алгоритма поиска максимального элемента массива
Пример. Модель алгоритма поиска максимального элемента массива
2.2. Графы: ультра-, гипер- и обыкновенные
2.2.1. Общее определение графа.
1.
2.2. Графы: ультра-, гипер- и обыкновенные
2.2.1. Общее определение графа.
1.
Общее определение графа
Положим, что при X={x1,x2,x3} и U={u1,u2,u3,u4} предикаты Г1(X,U) и
Общее определение графа
Положим, что при X={x1,x2,x3} и U={u1,u2,u3,u4} предикаты Г1(X,U) и
Общее определение графа
Предикаты Г1(X,U) и Г2(U,X) таковы, что для всех графов
Общее определение графа
Предикаты Г1(X,U) и Г2(U,X) таковы, что для всех графов
Виды графов
Данная трактовка графов допускает существование в них петель и кратных
Виды графов
Данная трактовка графов допускает существование в них петель и кратных
Отношения смежности
На элементах множеств X и U определены также отношения смежности
Отношения смежности
На элементах множеств X и U определены также отношения смежности
Отношения смежности
В соответствии с определением понятия «смежность» предикат смежности F1(X, X)
Отношения смежности
В соответствии с определением понятия «смежность» предикат смежности F1(X, X)
2.3 Предикаты-свойства
Определим одноместные предикаты-свойства, производные от предикатов Г1, Г2, F1, F2
2.3 Предикаты-свойства
Определим одноместные предикаты-свойства, производные от предикатов Г1, Г2, F1, F2
Предикаты-свойства
зафиксировав в предикате Г2(U,X) ребро uj, придем к предикату-свойству Г2
Предикаты-свойства
зафиксировав в предикате Г2(U,X) ребро uj, придем к предикату-свойству Г2
Предикаты-свойства
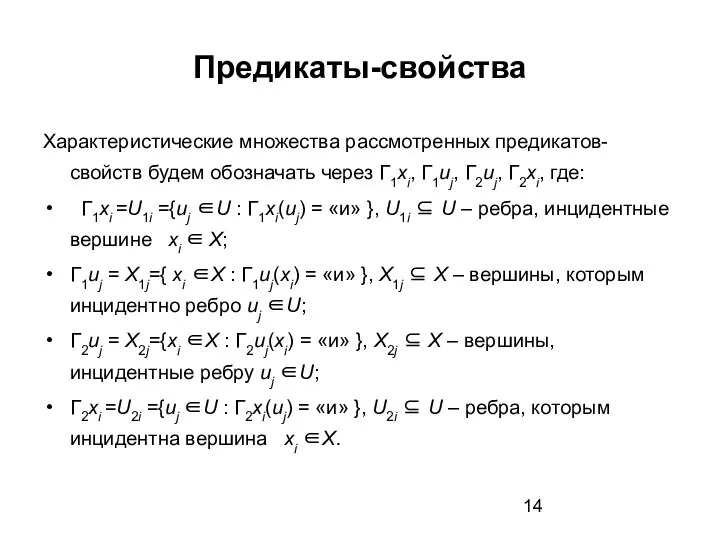
Характеристические множества рассмотренных предикатов-свойств будем обозначать через Г1xi, Г1uj, Г2uj, Г2xi,
Предикаты-свойства
Характеристические множества рассмотренных предикатов-свойств будем обозначать через Г1xi, Г1uj, Г2uj, Г2xi,
Предикаты-свойства
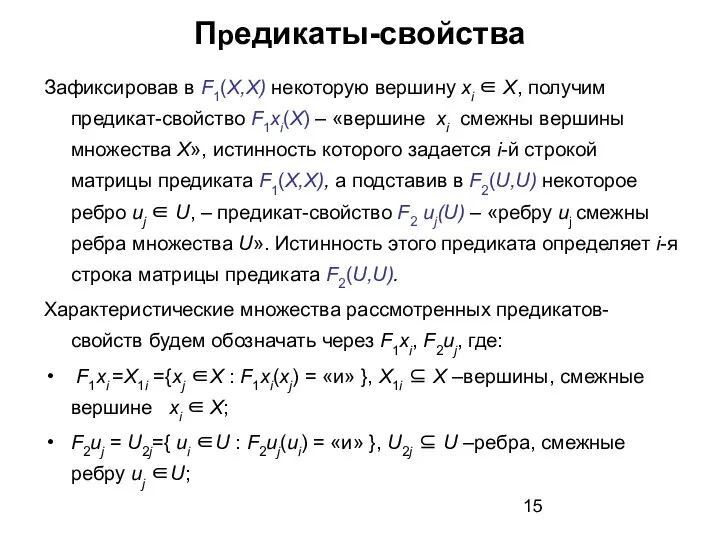
Зафиксировав в F1(X,X) некоторую вершину xi ∈ X, получим предикат-свойство F1xi(X)
Предикаты-свойства
Зафиксировав в F1(X,X) некоторую вершину xi ∈ X, получим предикат-свойство F1xi(X)
2.4 Ультраграфы
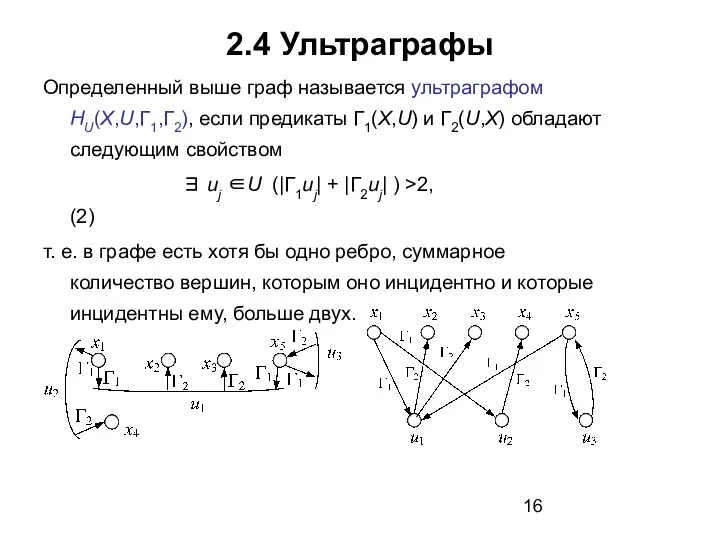
Определенный выше граф называется ультраграфом HU(X,U,Г1,Г2), если предикаты Г1(X,U) и
2.4 Ультраграфы
Определенный выше граф называется ультраграфом HU(X,U,Г1,Г2), если предикаты Г1(X,U) и
Представление ультраграфа матрицами инцидентности
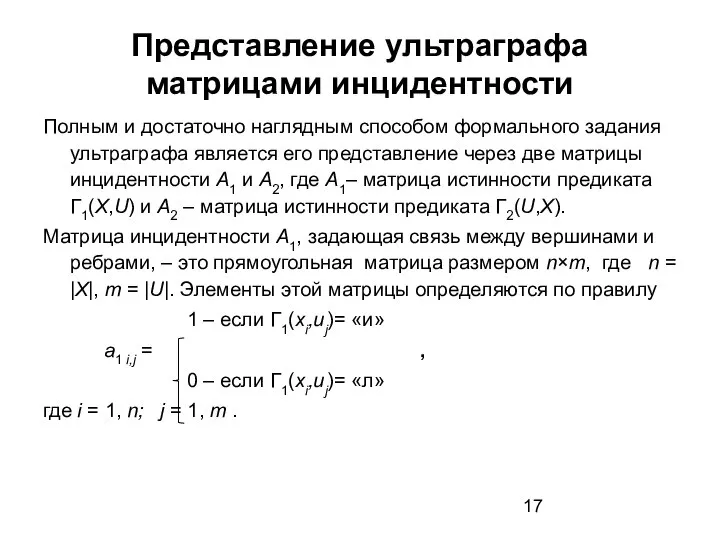
Полным и достаточно наглядным способом формального задания ультраграфа
Представление ультраграфа матрицами инцидентности
Полным и достаточно наглядным способом формального задания ультраграфа
Представление ультраграфа матрицами инцидентности
Матрица инцидентности А2 задает связь между ребрами и
Представление ультраграфа матрицами инцидентности
Матрица инцидентности А2 задает связь между ребрами и

Представление ультраграфа матрицами инцидентности
u1 u2 u3
x1 1 1 0 x1
Представление ультраграфа матрицами инцидентности
u1 u2 u3
x1 1 1 0 x1
Аналитическое представление ультраграфа
Аналитически ультраграф полностью задается множествами X, U и образами
Аналитическое представление ультраграфа
Аналитически ультраграф полностью задается множествами X, U и образами
Пример аналитического представления ультраграфа
Ультраграф данным способом будет задан, если заданы множества
Пример аналитического представления ультраграфа
Ультраграф данным способом будет задан, если заданы множества
Аналитическое представление ультраграфа образами и прообразами вершин и ребер
Рассмотренное представление ультраграфа,
Аналитическое представление ультраграфа образами и прообразами вершин и ребер
Рассмотренное представление ультраграфа,
Аналитическое представление ультраграфа образами и прообразами вершин и ребер
Элементы обратных предикатов
Аналитическое представление ультраграфа образами и прообразами вершин и ребер
Элементы обратных предикатов
Аналитическое представление ультраграфа образами и прообразами вершин и ребер
Аналогично множество вершин,
Аналитическое представление ультраграфа образами и прообразами вершин и ребер
Аналогично множество вершин,
Аналитическое представление ультраграфа образами и прообразами вершин и ребер
Геометрическая
интерпретация предикатов
Аналитическое представление ультраграфа образами и прообразами вершин и ребер
Геометрическая
интерпретация предикатов
Представление ультраграфа матрицами смежности
Предикат смежности вершин F1(X, X). Вершине xi смежна
Представление ультраграфа матрицами смежности
Предикат смежности вершин F1(X, X). Вершине xi смежна

Представление ультраграфа матрицами смежности
Предикат смежности ребер F2(U, U). Ребру uj смежно
Представление ультраграфа матрицами смежности
Предикат смежности ребер F2(U, U). Ребру uj смежно
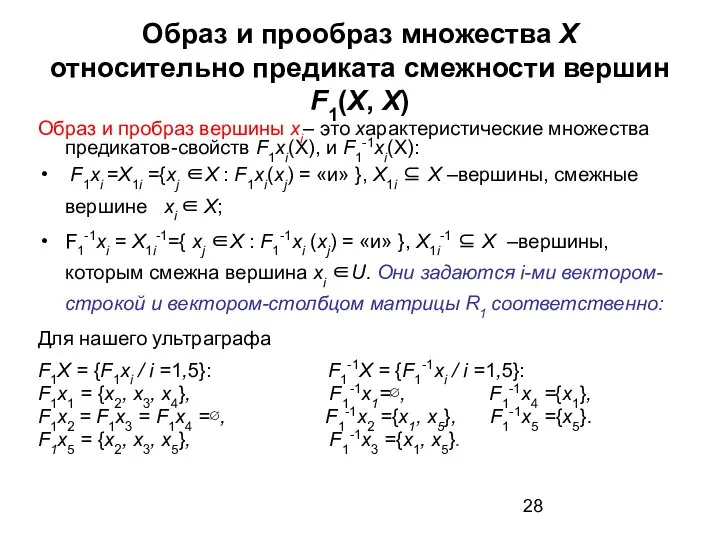
Образ и прообраз множества X относительно предиката смежности вершин F1(X, X)
Образ
Образ и прообраз множества X относительно предиката смежности вершин F1(X, X)
Образ
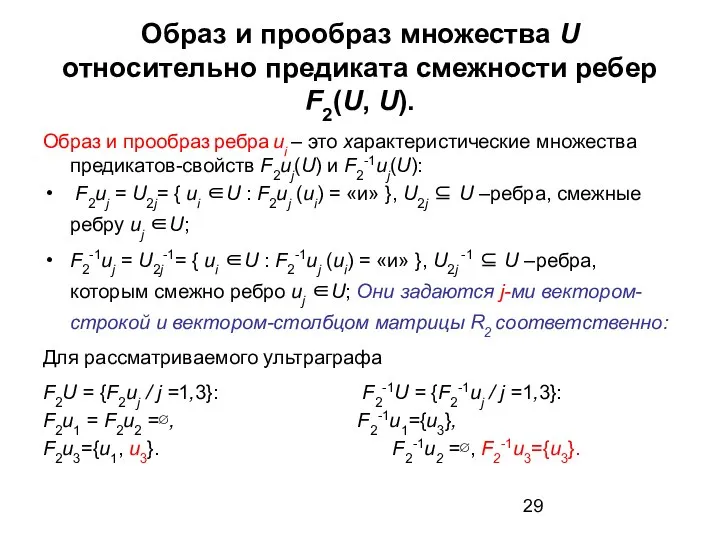
Образ и прообраз множества U относительно предиката смежности ребер F2(U, U).
Образ
Образ и прообраз множества U относительно предиката смежности ребер F2(U, U).
Образ
2.5 Гиперграфы
Данный вид графа получим в соответствии со сформулированным выше определением
2.5 Гиперграфы
Данный вид графа получим в соответствии со сформулированным выше определением
Гиперграфы
Вектор-строка таблицы истинности двуместного предиката-отношения Г1(X,U) – матрицы инцидентности вершины-ребра A1
Гиперграфы
Вектор-строка таблицы истинности двуместного предиката-отношения Г1(X,U) – матрицы инцидентности вершины-ребра A1
Гиперграфы
Отсюда, гиперграф будет полностью задан, если заданы множество вершин X, ребер
Гиперграфы
Отсюда, гиперграф будет полностью задан, если заданы множество вершин X, ребер
Представление гиперграфов
В качестве матрицы инцидентности AH будем использовать матрицу истинности
Представление гиперграфов
В качестве матрицы инцидентности AH будем использовать матрицу истинности
Представление гиперграфа матрицами смежности
Предикат смежности вершин F1(X, X). Элементы матрицы смежности
Представление гиперграфа матрицами смежности
Предикат смежности вершин F1(X, X). Элементы матрицы смежности
Представление гиперграфа матрицами смежности
Предикат смежности ребер F2(U, U). Элементы матрицы смежности
Представление гиперграфа матрицами смежности
Предикат смежности ребер F2(U, U). Элементы матрицы смежности
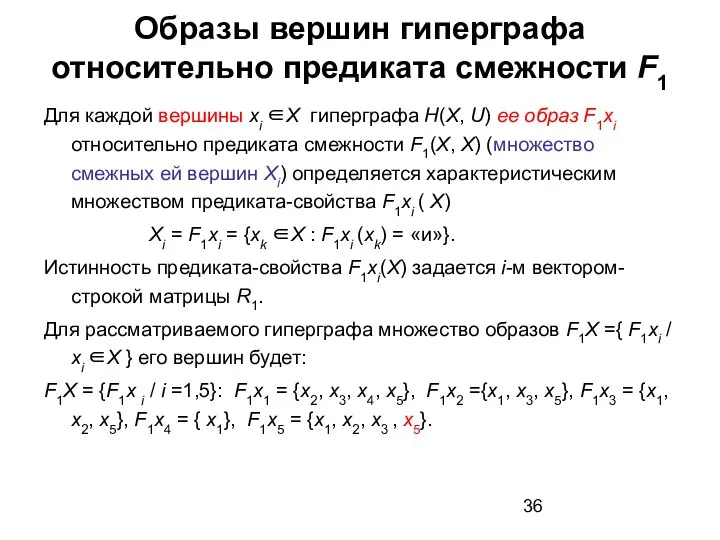
Образы вершин гиперграфа относительно предиката смежности F1
Для каждой вершины xi ∈X
Образы вершин гиперграфа относительно предиката смежности F1
Для каждой вершины xi ∈X
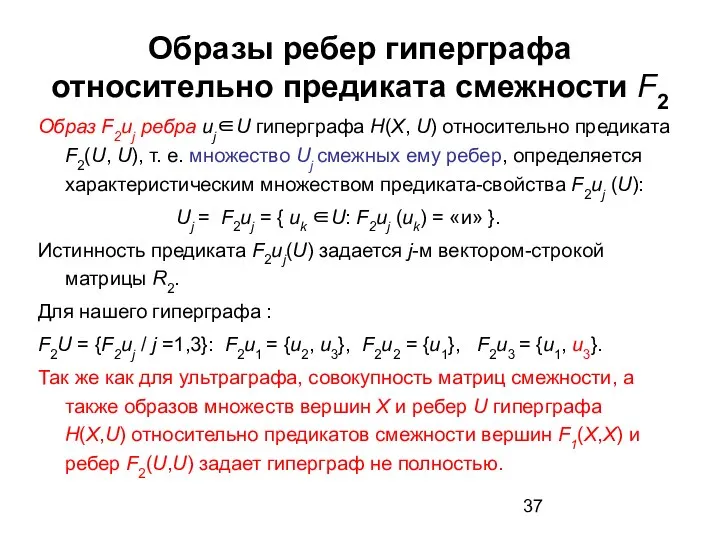
Образы ребер гиперграфа относительно предиката смежности F2
Образ F2uj ребра uj∈U гиперграфа
Образы ребер гиперграфа относительно предиката смежности F2
Образ F2uj ребра uj∈U гиперграфа
2.6 Обыкновенные ориентированные графы
Этот вид графа получим в том случае, если
2.6 Обыкновенные ориентированные графы
Этот вид графа получим в том случае, если
Представление ориентированного графа
Матрицы инцидентности A1 и A2 этого графа определяются
Представление ориентированного графа
Матрицы инцидентности A1 и A2 этого графа определяются
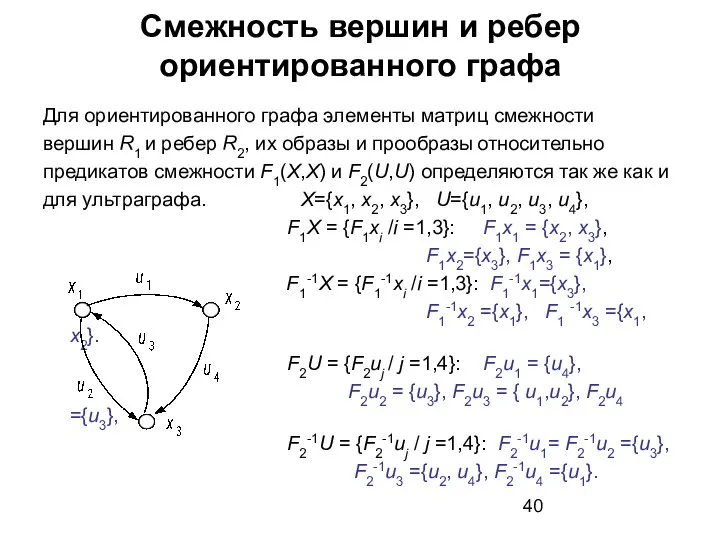
Смежность вершин и ребер ориентированного графа
Для ориентированного графа элементы матриц смежности
Смежность вершин и ребер ориентированного графа
Для ориентированного графа элементы матриц смежности
1.2.6. Обыкновенные неориентированные графы
Неориентированный граф можно определить как два непересекающихся множества
1.2.6. Обыкновенные неориентированные графы
Неориентированный граф можно определить как два непересекающихся множества
Представление неориентированного графа
Образы вершин и ребер относительно предикатов Г1 и Г2:
X={x1,
Представление неориентированного графа
Образы вершин и ребер относительно предикатов Г1 и Г2:
X={x1,
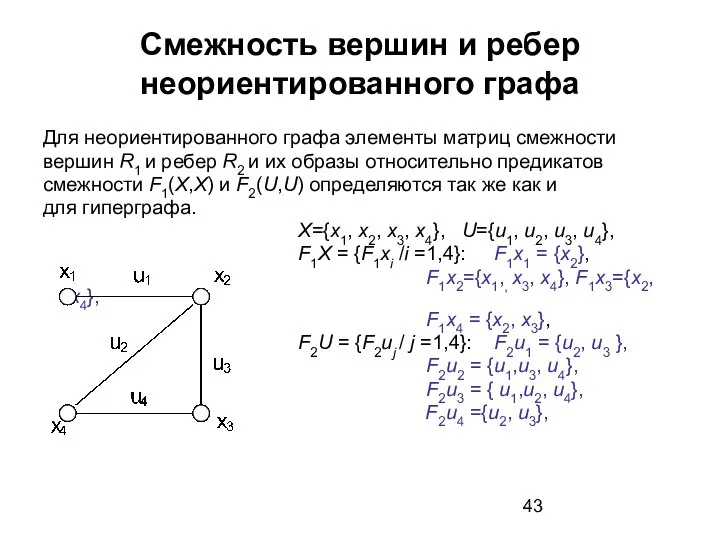
Смежность вершин и ребер неориентированного графа
Для неориентированного графа элементы матриц смежности
Смежность вершин и ребер неориентированного графа
Для неориентированного графа элементы матриц смежности
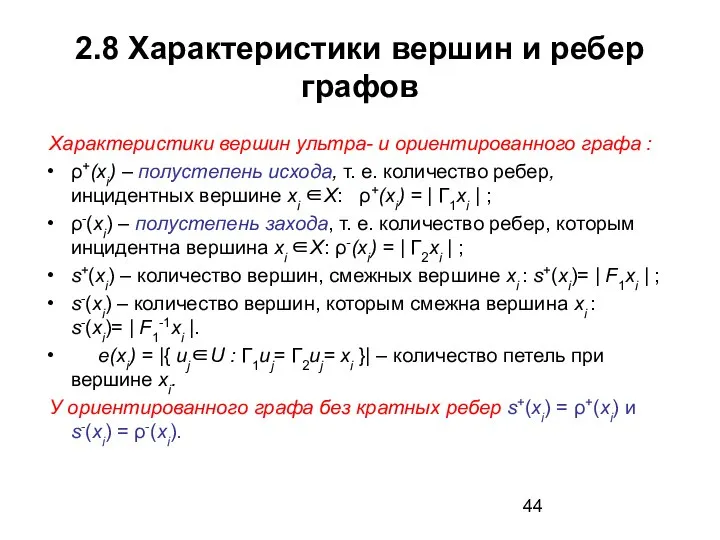
2.8 Характеристики вершин и ребер графов
Характеристики вершин ультра- и ориентированного
2.8 Характеристики вершин и ребер графов
Характеристики вершин ультра- и ориентированного
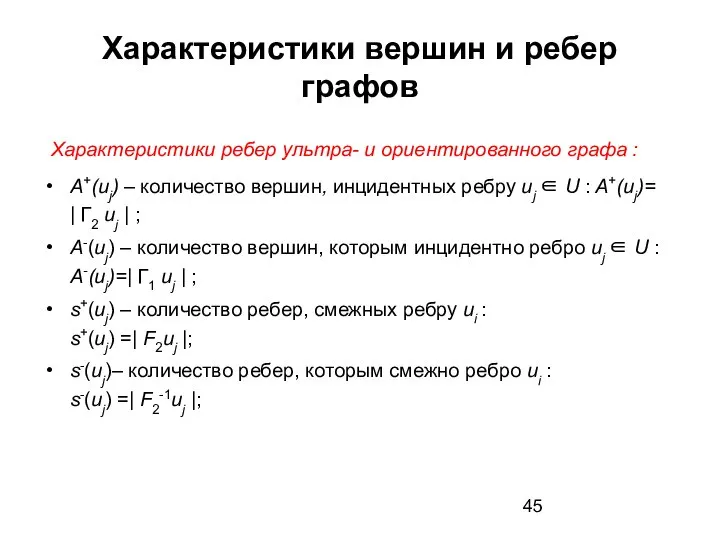
Характеристики вершин и ребер графов
Характеристики ребер ультра- и ориентированного графа
Характеристики вершин и ребер графов
Характеристики ребер ультра- и ориентированного графа
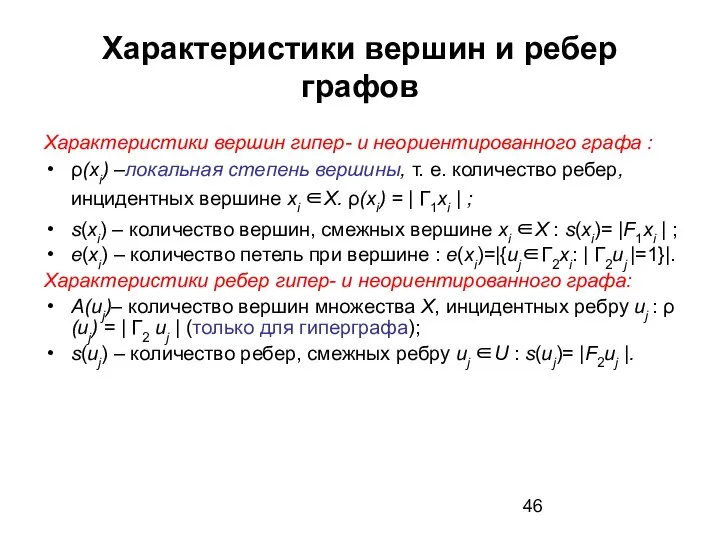
Характеристики вершин и ребер графов
Характеристики вершин гипер- и неориентированного графа :
ρ(xi)
Характеристики вершин и ребер графов
Характеристики вершин гипер- и неориентированного графа :
ρ(xi)
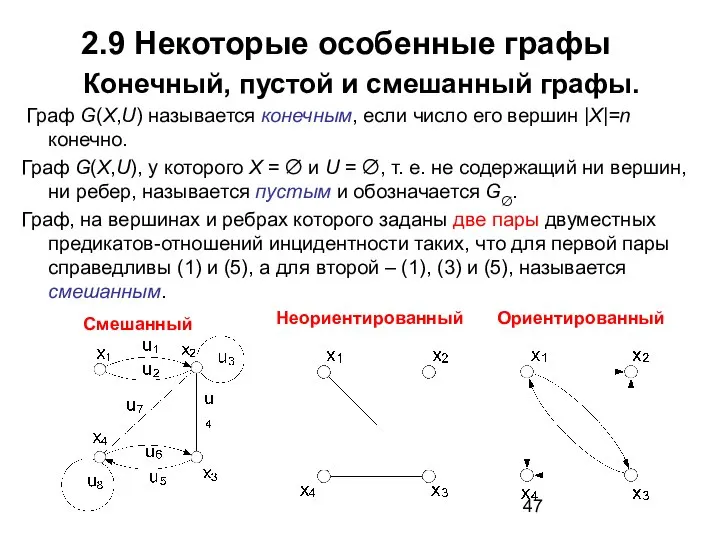
2.9 Некоторые особенные графы
Конечный, пустой и смешанный графы.
Граф G(X,U)
2.9 Некоторые особенные графы
Конечный, пустой и смешанный графы.
Граф G(X,U)
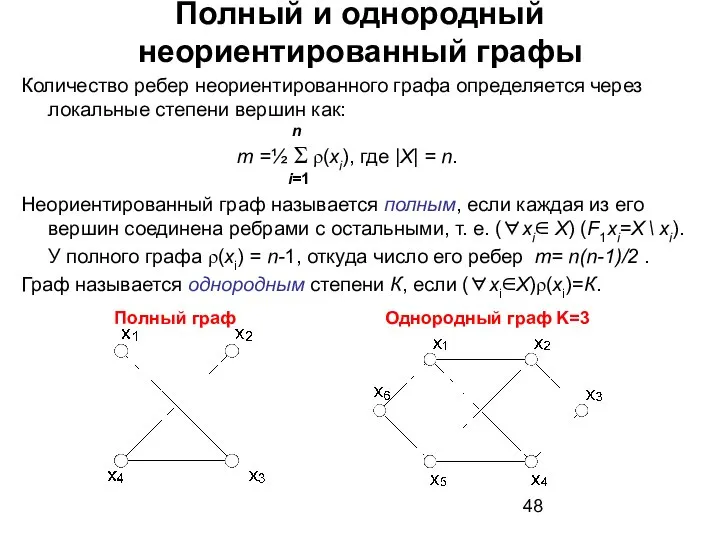
Полный и однородный неориентированный графы
Количество ребер неориентированного графа определяется через локальные
Полный и однородный неориентированный графы
Количество ребер неориентированного графа определяется через локальные
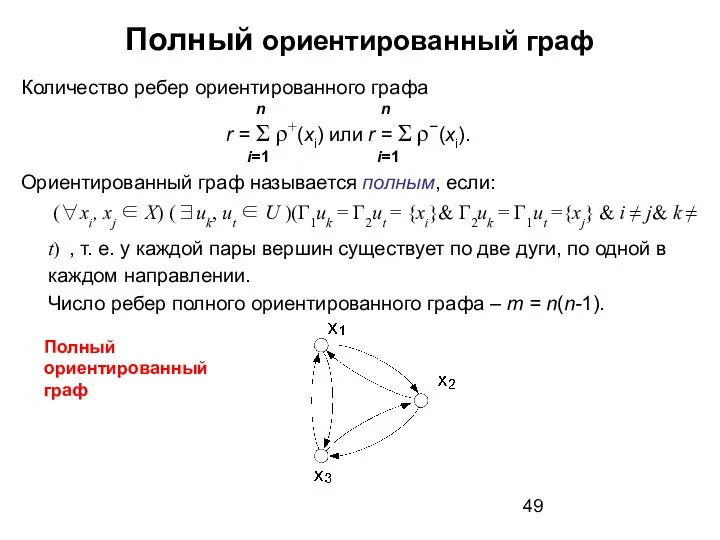
Полный ориентированный граф
Количество ребер ориентированного графа
n n
r =
Полный ориентированный граф
Количество ребер ориентированного графа
n n
r =
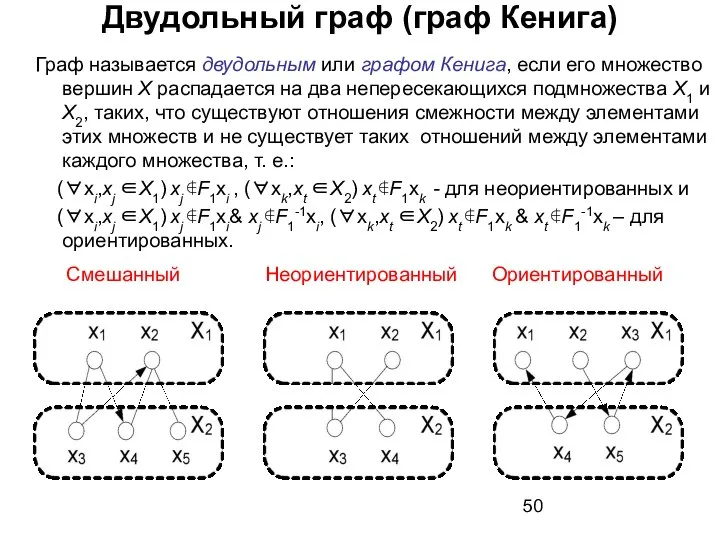
Двудольный граф (граф Кенига)
Граф называется двудольным или графом Кенига, если его
Двудольный граф (граф Кенига)
Граф называется двудольным или графом Кенига, если его
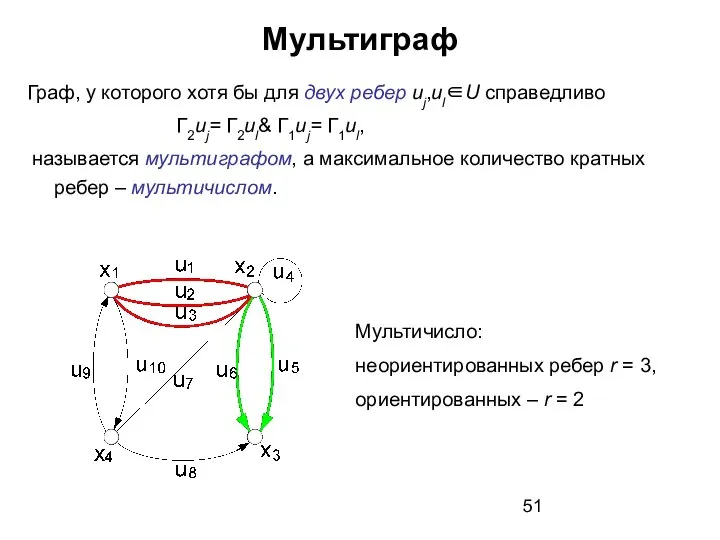
Мультиграф
Граф, у которого хотя бы для двух ребер uj,ul∈U справедливо
Г2uj=
Мультиграф
Граф, у которого хотя бы для двух ребер uj,ul∈U справедливо
Г2uj=
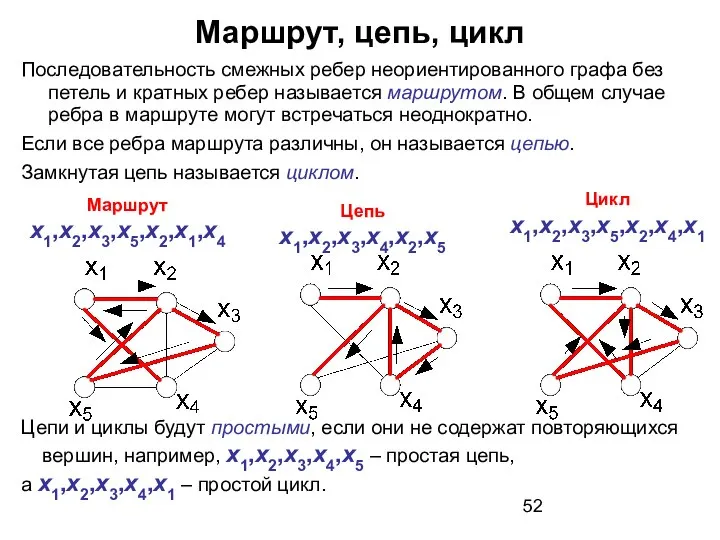
Маршрут, цепь, цикл
Последовательность смежных ребер неориентированного графа без петель и кратных
Маршрут, цепь, цикл
Последовательность смежных ребер неориентированного графа без петель и кратных
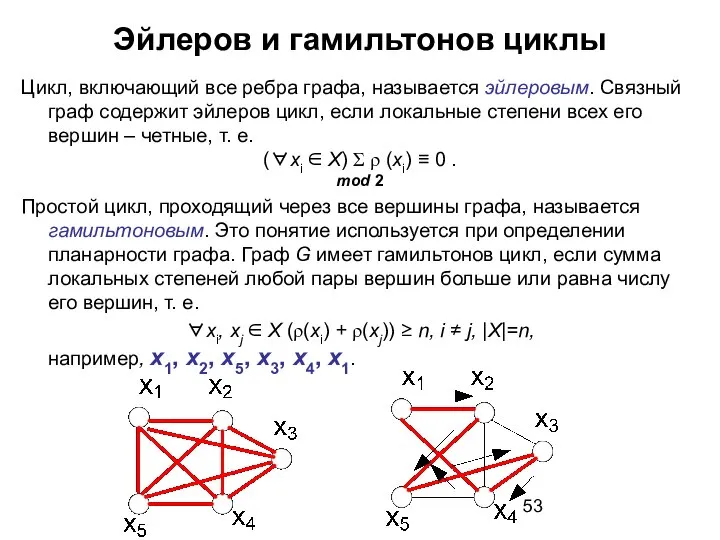
Эйлеров и гамильтонов циклы
Цикл, включающий все ребра графа, называется эйлеровым. Связный
Эйлеров и гамильтонов циклы
Цикл, включающий все ребра графа, называется эйлеровым. Связный
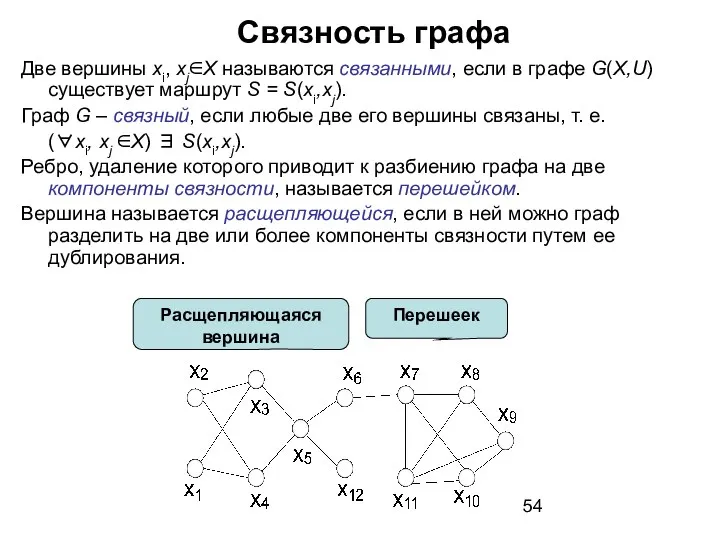
Связность графа
Две вершины xi, xj∈X называются связанными, если в графе G(X,U)
Связность графа
Две вершины xi, xj∈X называются связанными, если в графе G(X,U)
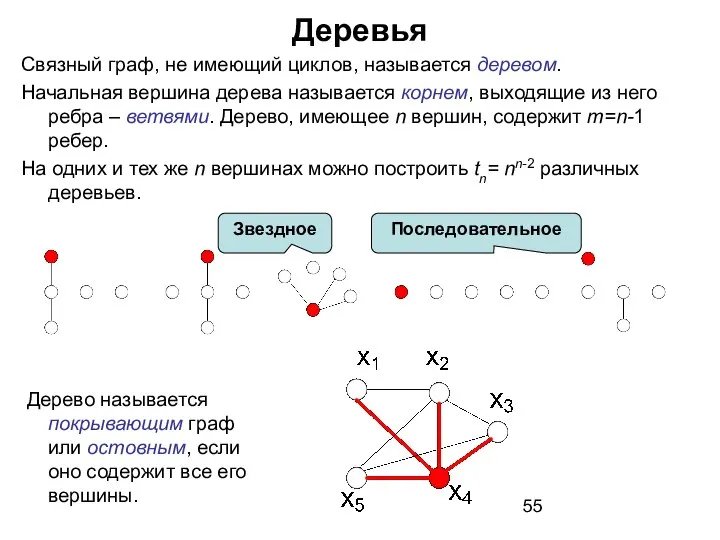
Деревья
Связный граф, не имеющий циклов, называется деревом.
Начальная вершина дерева называется
Деревья
Связный граф, не имеющий циклов, называется деревом.
Начальная вершина дерева называется
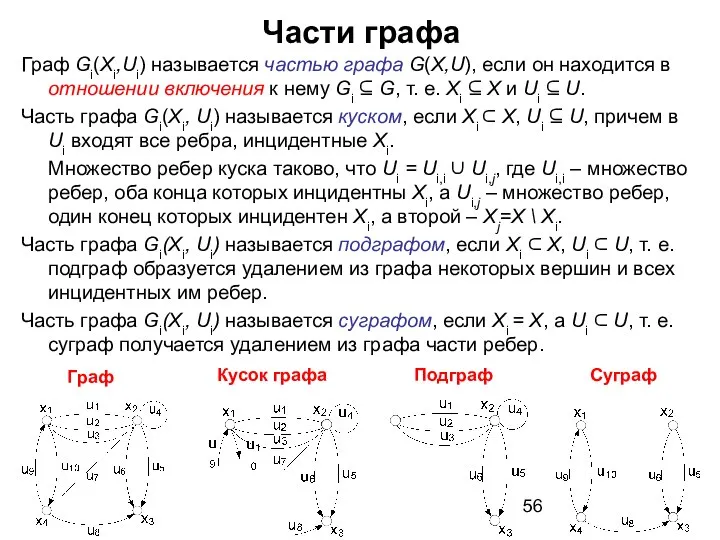
Части графа
Граф Gi(Xi,Ui) называется частью графа G(X,U), если он находится в
Части графа
Граф Gi(Xi,Ui) называется частью графа G(X,U), если он находится в
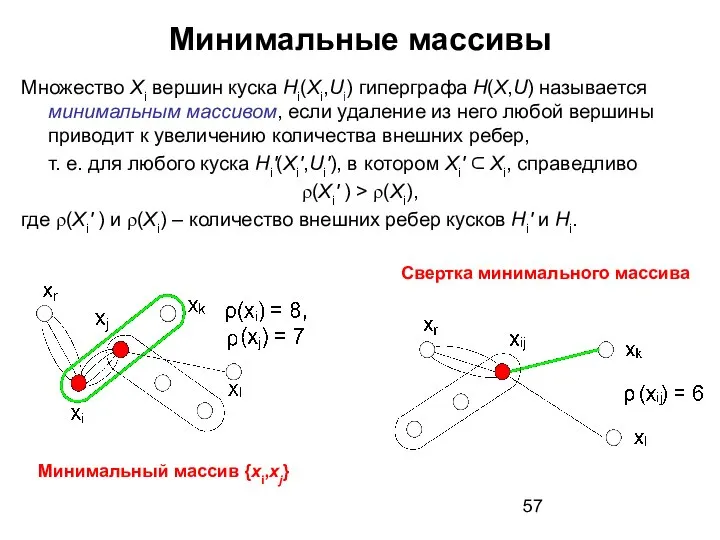
Минимальные массивы
Множество Xi вершин куска Hi(Xi,Ui) гиперграфа H(X,U) называется минимальным массивом,
Минимальные массивы
Множество Xi вершин куска Hi(Xi,Ui) гиперграфа H(X,U) называется минимальным массивом,
2.10 Представление структур сложных систем графами
Для перехода от объектов задач структурного
2.10 Представление структур сложных систем графами
Для перехода от объектов задач структурного
Представление структур сложных систем графами
задать способ отображения свойств и характеристик компонент
Представление структур сложных систем графами
задать способ отображения свойств и характеристик компонент
2.10.1 Представление схемы ультраграфом
Ультраграф является универсальной (обобщенной) моделью, так как позволяет
2.10.1 Представление схемы ультраграфом
Ультраграф является универсальной (обобщенной) моделью, так как позволяет
Представление схемы ультраграфом
Для этих задач адекватность математической модели объекту следует рассматривать
Представление схемы ультраграфом
Для этих задач адекватность математической модели объекту следует рассматривать
Представление схемы ультраграфом
При разработке математической модели системы в общем случае будем
Представление схемы ультраграфом
При разработке математической модели системы в общем случае будем
Представление схемы ультраграфом
Адекватность ультраграфа как структурной модели в указанных выше условиях
Представление схемы ультраграфом
Адекватность ультраграфа как структурной модели в указанных выше условиях
Представление схемы ультраграфом
Формальная запись правил перехода от структуры системы к ее
Представление схемы ультраграфом
Формальная запись правил перехода от структуры системы к ее
Представление схемы ультраграфом
Информации о номерах выводов подсистемы и времени распространения сигнала
Представление схемы ультраграфом
Информации о номерах выводов подсистемы и времени распространения сигнала
2.10.2 Представление схемы ориентированным графом
Обыкновенный ориентированный граф является частным случаем ультраграфа
2.10.2 Представление схемы ориентированным графом
Обыкновенный ориентированный граф является частным случаем ультраграфа
2.10.4 Представление структуры объекта гиперграфом и неориентированным графом
В соответствии с характерными
2.10.4 Представление структуры объекта гиперграфом и неориентированным графом
В соответствии с характерными
Представление структуры объекта гиперграфом и неориентированным графом
Для решения указанных задач в
Представление структуры объекта гиперграфом и неориентированным графом
Для решения указанных задач в
Представление схемы гиперграфом
При переходе от схемы к гиперграфу:
множеству элементов Э поставим
Представление схемы гиперграфом
При переходе от схемы к гиперграфу:
множеству элементов Э поставим
Представление схемы гиперграфом с точностью до выводом элементов
Типы элементов, а также
Представление схемы гиперграфом с точностью до выводом элементов
Типы элементов, а также
Представление схемы взвешенным гиперграфом
Гиперграф в форме H(,U, Г1X, <Г2U, К>).
X
Представление схемы взвешенным гиперграфом
Гиперграф в форме H( X
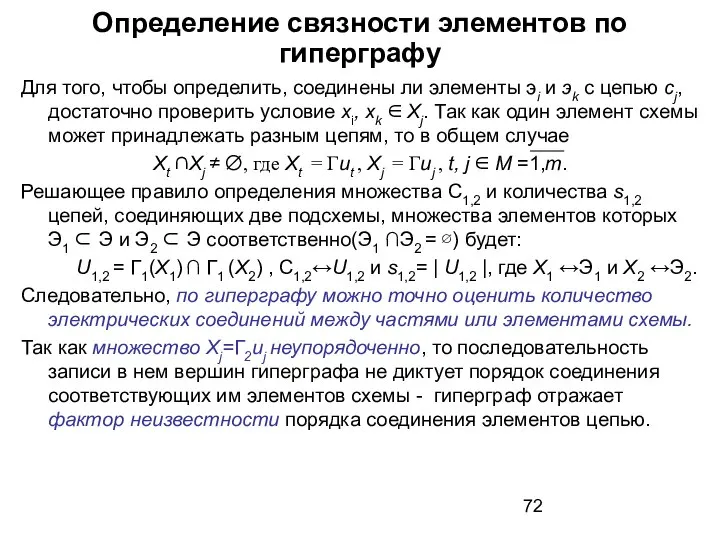
Определение связности элементов по гиперграфу
Для того, чтобы определить, соединены ли элементы
Определение связности элементов по гиперграфу
Для того, чтобы определить, соединены ли элементы
Представление схемы неориентированным графом
Такая модель, как правило, используется для задач
Представление схемы неориентированным графом
Такая модель, как правило, используется для задач
Пример представления схемы неориентированным графом
Правила перехода от объекта (схемы соединения элементов)
Пример представления схемы неориентированным графом
Правила перехода от объекта (схемы соединения элементов)
Представление цепей деревом и полным графом
Если соединение связывает более двух элементов,
Представление цепей деревом и полным графом
Если соединение связывает более двух элементов,
2.10.5 Математические модели монтажного пространства
Математические модели монтажного пространства используются для задач
2.10.5 Математические модели монтажного пространства
Математические модели монтажного пространства используются для задач
Математические модели монтажного пространства
В качестве математической модели монтажного пространства используется неориентированный
Математические модели монтажного пространства
В качестве математической модели монтажного пространства используется неориентированный
Модель монтажной плоскости фрагмента верхнего слоя печатной платы с ортогональным монтажом
Модель монтажной плоскости фрагмента верхнего слоя печатной платы с ортогональным монтажом
Математические модели монтажного пространства (3)
В модели многослойной печатной платы вертикальные ребра
Математические модели монтажного пространства (3)
В модели многослойной печатной платы вертикальные ребра
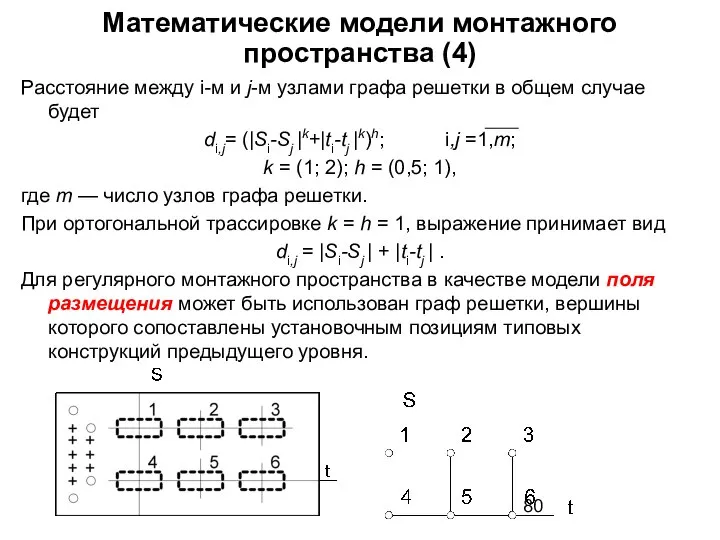
Математические модели монтажного пространства (4)
Расстояние между i-м и j-м узлами графа
Математические модели монтажного пространства (4)
Расстояние между i-м и j-м узлами графа
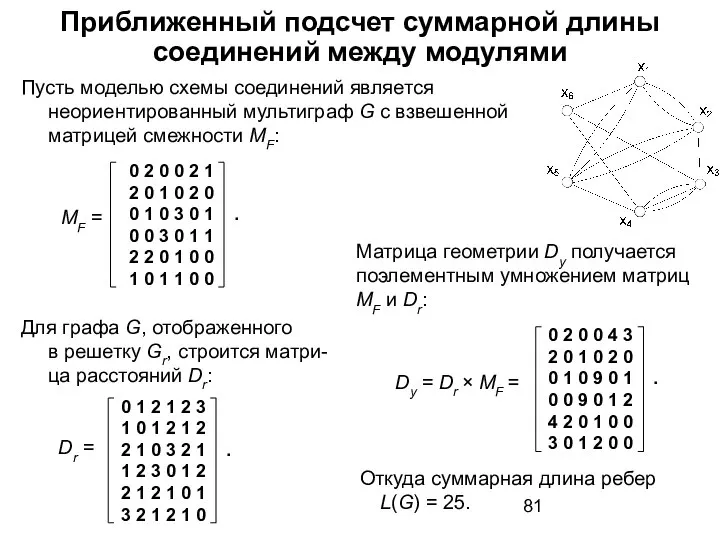
Приближенный подсчет суммарной длины соединений между модулями
Пусть моделью схемы соединений
Приближенный подсчет суммарной длины соединений между модулями
Пусть моделью схемы соединений
2.11 Математические модели структур данных
Отображение данных в память ЭВМ требует
2.11 Математические модели структур данных
Отображение данных в память ЭВМ требует
Требования к моделям структур данных
Эти модели должны:
– обеспечивать реализацию операций над
Требования к моделям структур данных
Эти модели должны:
– обеспечивать реализацию операций над
Требования к моделям структур данных
Таким образом в модели необходимо отобразить следующую
Требования к моделям структур данных
Таким образом в модели необходимо отобразить следующую
Выбор или разработка структур данных
Полный анализ применимости различных структур данных должен
Выбор или разработка структур данных
Полный анализ применимости различных структур данных должен
Вектор
Векторное представление данных имеет следующие преимущества:
непосредственный доступ к любому элементу массива,
Вектор
Векторное представление данных имеет следующие преимущества:
непосредственный доступ к любому элементу массива,
Односвязный и двусвязный списки
Линейный односвязный список – это линейный массив перемен-ного
Односвязный и двусвязный списки
Линейный односвязный список – это линейный массив перемен-ного
Односвязный и двусвязный списки
Для списковых структур характерны следующие преимущества:
- низкая
Односвязный и двусвязный списки
Для списковых структур характерны следующие преимущества:
- низкая
Комбинированные одноуровневые структуры данных
Такие структуры позволяют эффективно выполнять операции прямого
Комбинированные одноуровневые структуры данных
Такие структуры позволяют эффективно выполнять операции прямого
Модель вектора
Основными компонентами вектора данных как непрерывной последовательности элементов памяти, являются
Модель вектора
Основными компонентами вектора данных как непрерывной последовательности элементов памяти, являются
Модель вектора
Возможность непосредственного доступа к элементам памяти определяет свойство достижимости адресов
Модель вектора
Возможность непосредственного доступа к элементам памяти определяет свойство достижимости адресов
Модель вектора
Модели достижимости адресов вектора: достижимость адресов из адреса базы
Модель вектора
Модели достижимости адресов вектора: достижимость адресов из адреса базы
Модель вектора
Достижимость элемента памяти от любого другого Д(AЭ, AЭ) реализуется отношением
Модель вектора
Достижимость элемента памяти от любого другого Д(AЭ, AЭ) реализуется отношением
Модель вектора
Наличие значения знi в элементе памяти с адреcом аi задает
Модель вектора
Наличие значения знi в элементе памяти с адреcом аi задает
Модель вектора
Тогда моделью достижимости значений данных будет граф GЗ→({ZЭ, Y}, F3ZЭ),
Модель вектора
Тогда моделью достижимости значений данных будет граф GЗ→({ZЭ, Y}, F3ZЭ),
Модель вектора
Модели достижимости значений данных (а), вектора данных (б) и вектора
Модель вектора
Модели достижимости значений данных (а), вектора данных (б) и вектора
Модель двусвязного списка
Переход от списковой структуры к его модели в виде
Модель двусвязного списка
Переход от списковой структуры к его модели в виде
Модель двусвязного списка
адресам элементов списка AЭ – вершины множества ZЭD, значениям
Модель двусвязного списка
адресам элементов списка AЭ – вершины множества ZЭD, значениям
Модель двусвязного списка
Модель двусвязного списка
Модель двусвязного списка
В моделях элементов списка необходимо отобразить их адреса аi
Модель двусвязного списка
В моделях элементов списка необходимо отобразить их адреса аi
Модель двусвязного списка
Этот граф является объединением графов gi→(Zi, Fzi), gi←(Zi, Fzi)
Модель двусвязного списка
Этот граф является объединением графов gi→(Zi, Fzi), gi←(Zi, Fzi)
Модель комбинированной одноуровневой структуры
Рассматриваемая структура предназначена для обеспечения вычислительной сложности равной
Модель комбинированной одноуровневой структуры
Рассматриваемая структура предназначена для обеспечения вычислительной сложности равной
Модель комбинированной одноуровневой структуры
Моделью этой комбинированной структуры является граф – объединение
Модель комбинированной одноуровневой структуры
Моделью этой комбинированной структуры является граф – объединение
Модель комбинированной одноуровневой структуры
В этом графе: zБ ↔ аБ, ZЭP ↔
Модель комбинированной одноуровневой структуры
В этом графе: zБ ↔ аБ, ZЭP ↔
Модель комбинированной одноуровневой структуры
ZD = {{zу.н, zу.к}, ZЭD}, Fzу.н = zd1,
Модель комбинированной одноуровневой структуры
ZD = {{zу.н, zу.к}, ZЭD}, Fzу.н = zd1,
Двухуровневые структуры данных
Представление графов множествами вершин, рёбер и их образов (прообразов)
Двухуровневые структуры данных
Представление графов множествами вершин, рёбер и их образов (прообразов)
Двухуровневые структуры данных
Ниже рассмотрены структуры для представления графа в форме G(X,F1X).
Неориентированный
Двухуровневые структуры данных
Ниже рассмотрены структуры для представления графа в форме G(X,F1X).
Неориентированный
Двухуровневые структуры данных
Список векторов
Список списков
Вектор n-связных списков
Список n-связных списков
Двухуровневые структуры данных
Список векторов
Список списков
Вектор n-связных списков
Список n-связных списков
Модель двухуровневой структуры данных список-списков
Модель двухуровневой структуры данных рассмотрим для части
Модель двухуровневой структуры данных список-списков
Модель двухуровневой структуры данных рассмотрим для части
Модель двухуровневой структуры данных список-списков
В данной структуре хранятся два вида данных:
Модель двухуровневой структуры данных список-списков
В данной структуре хранятся два вида данных:
Модель двухуровневой структуры данных список-списков
Моделью этой двухуровневой структуры является граф GS({Zу,
Модель двухуровневой структуры данных список-списков
Моделью этой двухуровневой структуры является граф GS({Zу,
Модель двухуровневой структуры данных список-списков
Правила перехода от двусвязного списка к его
Модель двухуровневой структуры данных список-списков
Правила перехода от двусвязного списка к его
Пример двухуровневой комбинированной структуры данных
добавления подразумевают предварительный поиск с вычислительной сложнос-тью
Пример двухуровневой комбинированной структуры данных
добавления подразумевают предварительный поиск с вычислительной сложнос-тью
Пример двухуровневой комбинированной структуры данных (2)
При удалении вершины из множества X
Пример двухуровневой комбинированной структуры данных (2)
При удалении вершины из множества X

Пример двухуровневой комбинированной структуры данных (3)
В разработанной выше структуре поиск xi
Пример двухуровневой комбинированной структуры данных (3)
В разработанной выше структуре поиск xi
Трехсвязный список с векторами прямого доступа
Трехсвязный список с векторами прямого доступа
Модель двухуровневой комбинированной структуры
На рисунке представлена модель двухуровневой структуры – комбинация
Модель двухуровневой комбинированной структуры
На рисунке представлена модель двухуровневой структуры – комбинация
2.12 Математическая модель алгоритма
Для автоматизации анализа вычислительной и емкостной сложности,
2.12 Математическая модель алгоритма
Для автоматизации анализа вычислительной и емкостной сложности,
Математическая модель алгоритма
Элементарный базис логической структуры алгоритма составляют операторы:
начала и конца
Математическая модель алгоритма
Элементарный базис логической структуры алгоритма составляют операторы:
начала и конца
Математическая модель алгоритма
Помимо операций и их связей, компонентами алгоритма, отражающими процедурный
Математическая модель алгоритма
Помимо операций и их связей, компонентами алгоритма, отражающими процедурный
Математическая модель алгоритма
В математической модели должны быть отражены следующие компоненты
Математическая модель алгоритма
В математической модели должны быть отражены следующие компоненты
Математическая модель алгоритма
6) связи данные – операторы и наоборот, их типы,
Математическая модель алгоритма
6) связи данные – операторы и наоборот, их типы,
Математическая модель алгоритма
Моделью алгоритмов данного класса является управляющий граф, в котором
Математическая модель алгоритма
Моделью алгоритмов данного класса является управляющий граф, в котором
Математическая модель алгоритма
События передачи управления порождают отношения достижимости оператор – оператор,
Математическая модель алгоритма
События передачи управления порождают отношения достижимости оператор – оператор,
Математическая модель алгоритма
2. Тип и вычислительную сложность оператора отобразим, задав однозначное
Математическая модель алгоритма
2. Тип и вычислительную сложность оператора отобразим, задав однозначное
Математическая модель алгоритма
5. Отношения П1(O, С) – «управление передаётся от оператора»
Математическая модель алгоритма
5. Отношения П1(O, С) – «управление передаётся от оператора»
Математическая модель алгоритма
8. Вершинам прообразов F1-1xi вершин разветвления потока управления, присвоим
Математическая модель алгоритма
8. Вершинам прообразов F1-1xi вершин разветвления потока управления, присвоим
Математическая модель алгоритма
На рисунке следующего слайда показаны схемы алгоритмов программ: А1
Математическая модель алгоритма
На рисунке следующего слайда показаны схемы алгоритмов программ: А1

Математическая модель алгоритма
Схемы алгоритмов
Математическая модель алгоритма
Схемы алгоритмов
Математическая модель алгоритма
На рис. в:
DB ={di /i = 1,6}, где di
Математическая модель алгоритма
На рис. в:
DB ={di /i = 1,6}, где di
Математическая модель алгоритма
Граф GУ алгоритмов данного класса
Математическая модель алгоритма
Граф GУ алгоритмов данного класса
Математическая модель алгоритма
Вторая компонента модели алгоритма должна отображать отношения данные –
Математическая модель алгоритма
Вторая компонента модели алгоритма должна отображать отношения данные –
Математическая модель алгоритма
Тогда вторая модель алгоритма будет представлять собой двудольный граф,
Математическая модель алгоритма
Тогда вторая модель алгоритма будет представлять собой двудольный граф,
Математическая модель алгоритма
Переход к этому графу выполняется по правилам:
1. Множеству операторов
Математическая модель алгоритма
Переход к этому графу выполняется по правилам:
1. Множеству операторов
Математическая модель алгоритма
Модель класса алгоритмов, отображающая отношения между данными и операторами
Математическая модель алгоритма
Модель класса алгоритмов, отображающая отношения между данными и операторами
Математическая модель алгоритма
Интегральной моделью класса алгоритмов будет граф:
GA({X, Y}, F1Х, F1-1Х
Математическая модель алгоритма
Интегральной моделью класса алгоритмов будет граф:
GA({X, Y}, F1Х, F1-1Х
Математическая модель алгоритма
В модели конкретного алгоритма должны быть отражены реализуемые функции
Математическая модель алгоритма
В модели конкретного алгоритма должны быть отражены реализуемые функции
Математическая модель алгоритма
I1(PB) :
I1(p1(2) (DB)) = p1(2) (d5, d1) = «i
Математическая модель алгоритма
I1(PB) :
I1(p1(2) (DB)) = p1(2) (d5, d1) = «i
2.13 Модель сети
Неформально сеть можно определить следующим образом: имеется система, состоящая
2.13 Модель сети
Неформально сеть можно определить следующим образом: имеется система, состоящая
 Результативность и эффективность консультирования
Результативность и эффективность консультирования Слоган капсулы: Тренируйся с UMBRO
Слоган капсулы: Тренируйся с UMBRO «КРАСОТА РУССКОГО ЖЕНСКОГО КОСТЮМА» Апрель, 2009 г.
«КРАСОТА РУССКОГО ЖЕНСКОГО КОСТЮМА» Апрель, 2009 г. И.С.Тургенев (1818-1883)
И.С.Тургенев (1818-1883) National holidays of Kyrgyzstan
National holidays of Kyrgyzstan ТЕХНОЛОГИЯ ПРОИЗВОДСТВА МЯСНЫХ КОНСЕРВОВ. КРИТИЧЕСКИЕ ТОЧКИ ХАССП ПРИ ПРОИЗВОДСТАЕ МЯСНЫХ КОНСЕРВОВ
ТЕХНОЛОГИЯ ПРОИЗВОДСТВА МЯСНЫХ КОНСЕРВОВ. КРИТИЧЕСКИЕ ТОЧКИ ХАССП ПРИ ПРОИЗВОДСТАЕ МЯСНЫХ КОНСЕРВОВ Express.js
Express.js Микрорайон. Концепция реновации квартала
Микрорайон. Концепция реновации квартала Язык программирования Object Pascal. Общий обзор
Язык программирования Object Pascal. Общий обзор Игры с экологическим содержанием на занятиях по татарскому языку в детском саду
Игры с экологическим содержанием на занятиях по татарскому языку в детском саду Технологічні засоби та забезпечення для побудови інформаційних систем на підприємствах
Технологічні засоби та забезпечення для побудови інформаційних систем на підприємствах Воспаление
Воспаление  SIMATIC RTU 3030C – самодостаточное и автономное
SIMATIC RTU 3030C – самодостаточное и автономное История возникновения столовых приборов
История возникновения столовых приборов Работа с родителями Классный руководитель 5 класса 2013 – 2014г Токарева Н. В.
Работа с родителями Классный руководитель 5 класса 2013 – 2014г Токарева Н. В. Большой теннис
Большой теннис Презентация Финансы
Презентация Финансы Производство кожаной обуви
Производство кожаной обуви Тоталитарное государство и его характеристика
Тоталитарное государство и его характеристика Электронная книга
Электронная книга Социальная политика Финляндии
Социальная политика Финляндии Презентация ГРУППА 58 СПЕЦИАЛЬНЫЕ ТКАНИ; ТАФТИНГОВЫЕ ТЕКСТИЛЬНЫЕ МАТЕPИАЛЫ; КРУЖЕВА; ГОБЕЛЕНЫ; ОТДЕЛОЧНЫЕ МАТЕРИАЛЫ; ВЫШИВКИ Подг
Презентация ГРУППА 58 СПЕЦИАЛЬНЫЕ ТКАНИ; ТАФТИНГОВЫЕ ТЕКСТИЛЬНЫЕ МАТЕPИАЛЫ; КРУЖЕВА; ГОБЕЛЕНЫ; ОТДЕЛОЧНЫЕ МАТЕРИАЛЫ; ВЫШИВКИ Подг Презентация на тему "ПРОФИЛАКТИКА ТУБЕРКУЛЕЗА" - скачать презентации по Медицине
Презентация на тему "ПРОФИЛАКТИКА ТУБЕРКУЛЕЗА" - скачать презентации по Медицине Презентация по музыке «Вербное воскресенье, вербочки» 3 класс
Презентация по музыке «Вербное воскресенье, вербочки» 3 класс Неправильное положение плода
Неправильное положение плода Система организации спортивного досуга студентов
Система организации спортивного досуга студентов Исследование алгоритмов поисковых систем, разработка системы прогнозирования позиций сайтов в результатах поисковой выдачи
Исследование алгоритмов поисковых систем, разработка системы прогнозирования позиций сайтов в результатах поисковой выдачи Использование Ассемблера в ЯВУ Соглашение о регистрах
Использование Ассемблера в ЯВУ Соглашение о регистрах