- МЕХАНИЗМЫ ПРЕРЫВИСТОГО ДВИЖЕНИЯ.КУЛАЧКОВЫЕ МЕХАНИЗМЫ

Содержание
- 2. УМПО. Лекция №7 ПЛАН ЛЕКЦИИ 7.1 Храповые механизмы 7.2 Кулачковые механизмы 7.2.1 Виды и применение 7.2.2
- 3. УМПО. Лекция №7 Механизмы прерывистого движения находят широкое распространение в различных устройствах полиграфического оборудования, например, в
- 4. УМПО. Лекция №7 Храповые механизмы Служат для преобразования качательного или возвратно-поступательного движения ведущей собачки в прерывистое
- 5. УМПО. Лекция №7 Храповые механизмы Схемы храповых механизмов: с односторонним зацеплением (а); с двусторонним зацеплением (б);
- 6. УМПО. Лекция №7 Основные параметры элементов зацепления h ‑ высота зуба; pt ‑ шаг; ψ ‑
- 7. УМПО. Лекция №7 ПАРАМЕТРЫ ХРАПОВЫХ МЕХАНИЗМОВ Наружная окружность храпового колеса и окружной шаг зубьев определяются по
- 8. УМПО. Лекция №7 Угол поворота храпового колеса где n – число оборотов диска (при вращательном движении
- 9. УМПО. Лекция №7 Соотношения параметров зацепления Величина углов ψ и ψ1 для храповых механизмов с модулем
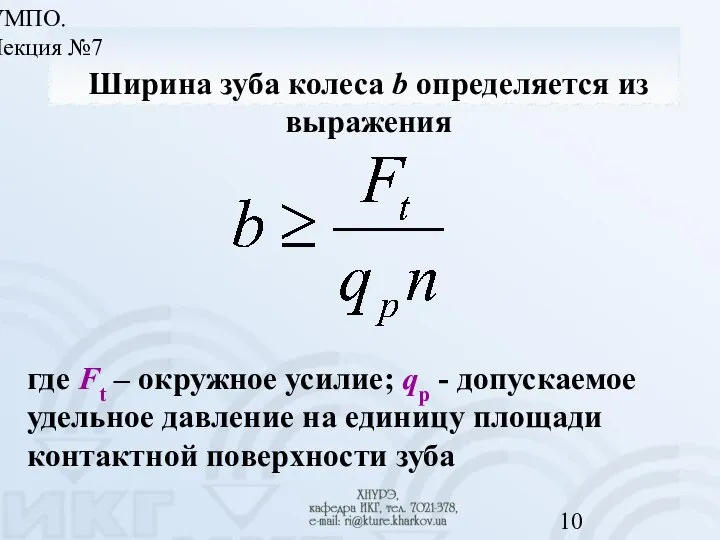
- 10. УМПО. Лекция №7 Ширина зуба колеса b определяется из выражения где Ft – окружное усилие; qp
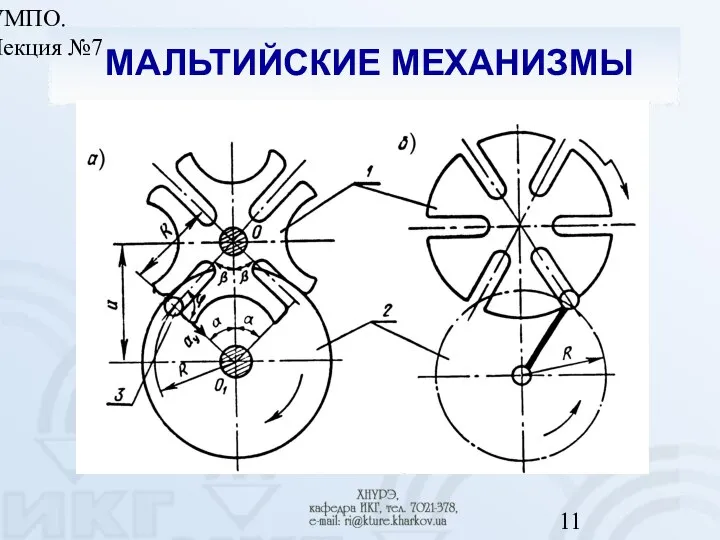
- 11. УМПО. Лекция №7 МАЛЬТИЙСКИЕ МЕХАНИЗМЫ
- 12. УМПО. Лекция №7 Кулачковые механизмы находят повсеместное применение во многих механизмах полиграфического оборудования. Предназначены для преобразования
- 13. УМПО. Лекция №7 СХЕМА КУЛАЧКОВОГО МЕХАНИЗМА Степень свободы механизма
- 14. УМПО. Лекция №7 КУЛАЧКОВЫЙ ГРЕЙФЕРНЫЙ МЕХАНИЗМ
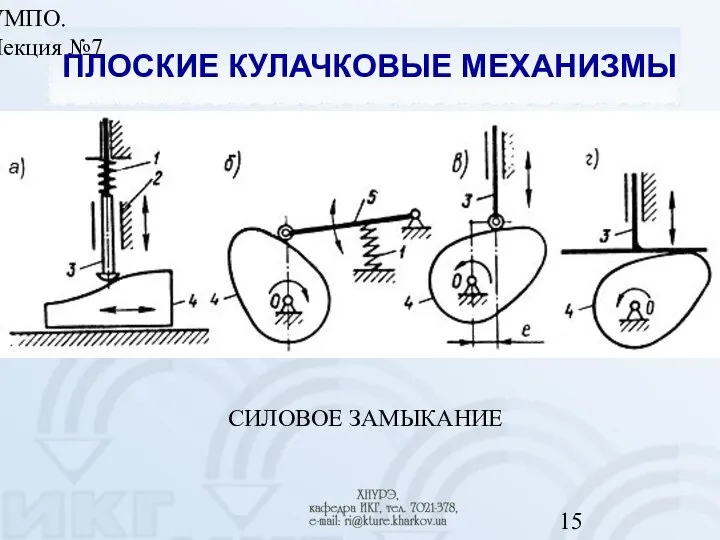
- 15. УМПО. Лекция №7 ПЛОСКИЕ КУЛАЧКОВЫЕ МЕХАНИЗМЫ СИЛОВОЕ ЗАМЫКАНИЕ
- 16. УМПО. Лекция №7 ПЛОСКИЕ КУЛАЧКОВЫЕ МЕХАНИЗМЫ ГЕОМЕТРИЧЕСКОЕ ЗАМЫКАНИЕ
- 17. УМПО. Лекция №7 СМЕЩЕННЫЙ КУЛАЧКОВЫЙ МЕХАНИЗМ
- 18. УМПО. Лекция №7 ПРОСТРАНСТВЕННЫЕ КУЧКОВЫЕ МЕХАНИЗМЫ
- 19. УМПО. Лекция №7 ДОСТОИНСТВА Основным достоинством кулачковых механизмов является возможность с их помощью воспроизвести широкий класс
- 20. УМПО. Лекция №7 НЕДОСТАТКИ большие давления в месте контакта высшей пары, из‑за чего механизм может передавать
- 21. УМПО. Лекция №7 СИЛОВОЙ АНАЛИЗ Q- сила сопротивления; N1, N2- усилия в кинематической паре толкатель –
- 22. УМПО. Лекция №7 РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА 1. Тексты лекций по курсу «Узлы и механизмы полиграфического оборудования» для
- 24. Скачать презентацию

УМПО. Лекция №7
ПЛАН ЛЕКЦИИ
7.1 Храповые механизмы
7.2 Кулачковые механизмы
7.2.1 Виды и применение
7.2.2 Кинематический
УМПО. Лекция №7
ПЛАН ЛЕКЦИИ
7.1 Храповые механизмы
7.2 Кулачковые механизмы
7.2.1 Виды и применение
7.2.2 Кинематический
УМПО. Лекция №7
Механизмы прерывистого движения
находят широкое распространение в различных
УМПО. Лекция №7
Механизмы прерывистого движения
находят широкое распространение в различных
УМПО. Лекция №7
Храповые механизмы
Служат для преобразования качательного или возвратно-поступательного движения
УМПО. Лекция №7
Храповые механизмы
Служат для преобразования качательного или возвратно-поступательного движения

УМПО. Лекция №7
Храповые механизмы
Схемы храповых механизмов:
с односторонним зацеплением (а);
с
УМПО. Лекция №7
Храповые механизмы
Схемы храповых механизмов:
с односторонним зацеплением (а);
с

УМПО. Лекция №7
Основные параметры элементов зацепления
h ‑ высота зуба; pt ‑ шаг; ψ ‑ угол впадины
УМПО. Лекция №7
Основные параметры элементов зацепления
h ‑ высота зуба; pt ‑ шаг; ψ ‑ угол впадины
УМПО. Лекция №7
ПАРАМЕТРЫ ХРАПОВЫХ МЕХАНИЗМОВ
Наружная окружность храпового колеса и окружной шаг
УМПО. Лекция №7
ПАРАМЕТРЫ ХРАПОВЫХ МЕХАНИЗМОВ
Наружная окружность храпового колеса и окружной шаг
УМПО. Лекция №7
Угол поворота храпового колеса
где n – число оборотов диска (при вращательном
УМПО. Лекция №7
Угол поворота храпового колеса
где n – число оборотов диска (при вращательном

УМПО. Лекция №7
Соотношения параметров зацепления
Величина углов ψ и ψ1 для
УМПО. Лекция №7
Соотношения параметров зацепления
Величина углов ψ и ψ1 для
УМПО. Лекция №7
Ширина зуба колеса b определяется из выражения
где Ft – окружное усилие;
УМПО. Лекция №7
Ширина зуба колеса b определяется из выражения
где Ft – окружное усилие;
УМПО. Лекция №7
МАЛЬТИЙСКИЕ МЕХАНИЗМЫ
УМПО. Лекция №7
МАЛЬТИЙСКИЕ МЕХАНИЗМЫ

УМПО. Лекция №7
Кулачковые механизмы
находят повсеместное применение во многих механизмах
УМПО. Лекция №7
Кулачковые механизмы
находят повсеместное применение во многих механизмах

УМПО. Лекция №7
СХЕМА КУЛАЧКОВОГО МЕХАНИЗМА
Степень свободы механизма
УМПО. Лекция №7
СХЕМА КУЛАЧКОВОГО МЕХАНИЗМА
Степень свободы механизма

УМПО. Лекция №7
КУЛАЧКОВЫЙ ГРЕЙФЕРНЫЙ МЕХАНИЗМ
УМПО. Лекция №7
КУЛАЧКОВЫЙ ГРЕЙФЕРНЫЙ МЕХАНИЗМ
УМПО. Лекция №7
ПЛОСКИЕ КУЛАЧКОВЫЕ МЕХАНИЗМЫ
СИЛОВОЕ ЗАМЫКАНИЕ
УМПО. Лекция №7
ПЛОСКИЕ КУЛАЧКОВЫЕ МЕХАНИЗМЫ
СИЛОВОЕ ЗАМЫКАНИЕ

УМПО. Лекция №7
ПЛОСКИЕ КУЛАЧКОВЫЕ МЕХАНИЗМЫ
ГЕОМЕТРИЧЕСКОЕ ЗАМЫКАНИЕ
УМПО. Лекция №7
ПЛОСКИЕ КУЛАЧКОВЫЕ МЕХАНИЗМЫ
ГЕОМЕТРИЧЕСКОЕ ЗАМЫКАНИЕ

УМПО. Лекция №7
СМЕЩЕННЫЙ КУЛАЧКОВЫЙ МЕХАНИЗМ
УМПО. Лекция №7
СМЕЩЕННЫЙ КУЛАЧКОВЫЙ МЕХАНИЗМ

УМПО. Лекция №7
ПРОСТРАНСТВЕННЫЕ КУЧКОВЫЕ МЕХАНИЗМЫ
УМПО. Лекция №7
ПРОСТРАНСТВЕННЫЕ КУЧКОВЫЕ МЕХАНИЗМЫ
УМПО. Лекция №7
ДОСТОИНСТВА
Основным достоинством кулачковых механизмов является возможность с их
УМПО. Лекция №7
ДОСТОИНСТВА
Основным достоинством кулачковых механизмов является возможность с их
УМПО. Лекция №7
НЕДОСТАТКИ
большие давления в месте контакта высшей пары, из‑за чего
УМПО. Лекция №7
НЕДОСТАТКИ
большие давления в месте контакта высшей пары, из‑за чего

УМПО. Лекция №7
СИЛОВОЙ АНАЛИЗ
Q- сила сопротивления; N1, N2- усилия в кинематической паре толкатель – направляющая;
УМПО. Лекция №7
СИЛОВОЙ АНАЛИЗ
Q- сила сопротивления; N1, N2- усилия в кинематической паре толкатель – направляющая;

УМПО. Лекция №7
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1. Тексты лекций по курсу «Узлы и механизмы
УМПО. Лекция №7
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1. Тексты лекций по курсу «Узлы и механизмы
 Автоматизированное регулирование скорости движения отцепов АРС
Автоматизированное регулирование скорости движения отцепов АРС протокол H323
протокол H323 Методы оценки персонала
Методы оценки персонала Что такое криоэлектроника
Что такое криоэлектроника Trade
Trade  Робер Дуано – ироничный наблюдатель, лиричный и великий фотограф-гуманист
Робер Дуано – ироничный наблюдатель, лиричный и великий фотограф-гуманист Управління проектами логістизації машинобудівних підприємств
Управління проектами логістизації машинобудівних підприємств Алгебра-7 Глава III. Одночлены и многочлены. §16. Умножение многочлена на одночлен.
Алгебра-7 Глава III. Одночлены и многочлены. §16. Умножение многочлена на одночлен. Презентация на тему «Храмы России»
Презентация на тему «Храмы России» Презентация Социологическая концепция П.Сорокина: истоки, формирование, применение.
Презентация Социологическая концепция П.Сорокина: истоки, формирование, применение. Émile Benveniste (1902-1976)
Émile Benveniste (1902-1976) Изображение ландшафта средствами графики
Изображение ландшафта средствами графики Мартин Хайдеггер 1889-1976
Мартин Хайдеггер 1889-1976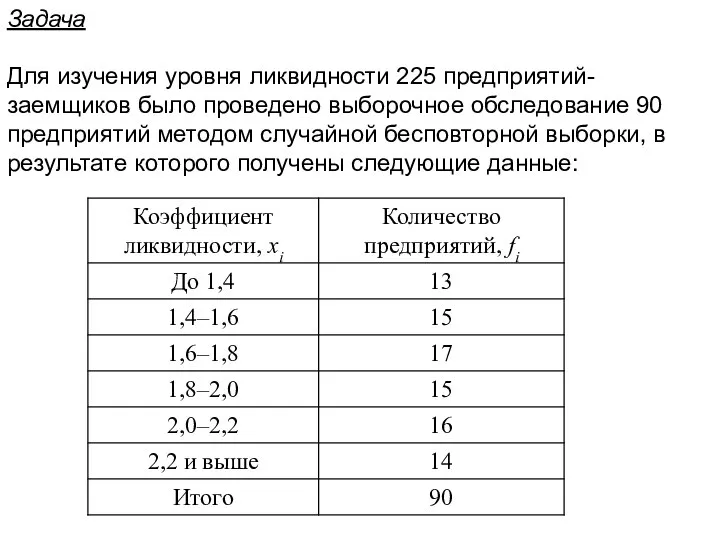 Выборка
Выборка Правовая основа концепции оказания бесплатной юридической помощи на территории Архангельской области
Правовая основа концепции оказания бесплатной юридической помощи на территории Архангельской области Переговоры. Стратегии ведения
Переговоры. Стратегии ведения Аналитическая разведка
Аналитическая разведка Строительное материаловедение
Строительное материаловедение Мировая художественная культура. Культура духовная и материальная
Мировая художественная культура. Культура духовная и материальная Технико-тактическая подготовка спортсмена
Технико-тактическая подготовка спортсмена Проектная деятельность в практике учителя начальной школы. Скажи и я забуду. Покажи
Проектная деятельность в практике учителя начальной школы. Скажи и я забуду. Покажи  Ценообразование на мировом рынке Выполнили : Студенты 4-го курса ФТД ДС -05 Бреус Каган Харламова
Ценообразование на мировом рынке Выполнили : Студенты 4-го курса ФТД ДС -05 Бреус Каган Харламова  Краны для возведения зданий и сооружений. Иллюстрированное приложение
Краны для возведения зданий и сооружений. Иллюстрированное приложение Лёгочные диссеминации
Лёгочные диссеминации  Теория креационизма
Теория креационизма Демографическая ситуация в России Выполнила Файль Екатерина
Демографическая ситуация в России Выполнила Файль Екатерина  Мода В XVI-XVII веках. Испания
Мода В XVI-XVII веках. Испания Посадки в ЕСДП СЭВ
Посадки в ЕСДП СЭВ