- Мехатронные модули

Содержание
- 2. Систематика мехатронных модулей
- 3. На рис. 5.1 представлена, одна из известных, классификаций мехатронных модулей по конструктивным признакам. В данной классификации
- 4. Рассмотрим мехатронные модули согласно представленной классификации.
- 5. Преобразователи движения Передача движения от двигателя к выходному звену мехатронного модуля может быть обеспечена с помощью
- 6. Реечные передачи Реечная передача предназначена для преобразования вращательного движения шестерни в поступательное движение рейки и, наоборот,
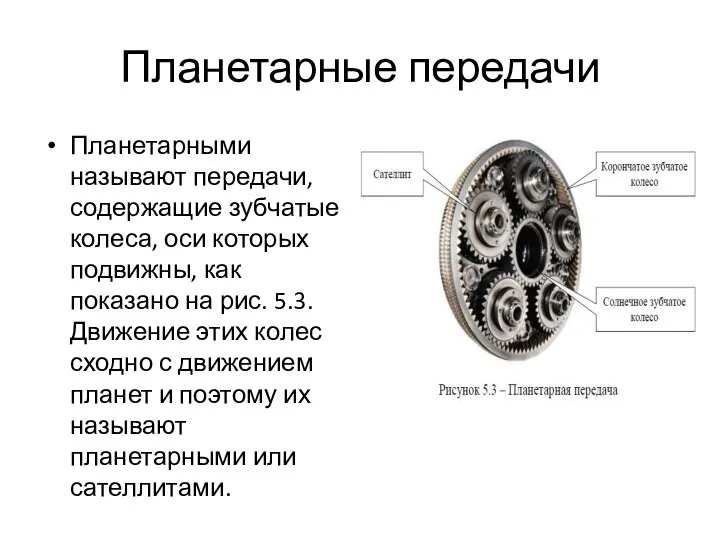
- 7. Планетарные передачи Планетарными называют передачи, содержащие зубчатые колеса, оси которых подвижны, как показано на рис. 5.3.
- 8. Простейшая планетарная передача состоит из центрального солнечного зубчатого колеса с наружными зубьями, центрального корончатого зубчатого колеса
- 9. Волновые зубчатые передачи Работа волновой передачи основана на принципе преобразования параметров движения вследствие волнового деформирования одного
- 11. Недостатками волновых передач являются: ограничение по частотам вращения ведущего вала генератора волн при больших диаметрах колес
- 12. Передача винт-гайка качения Передача винт-гайка качения (шарико-винтовая передача) предназначена для преобразования вращательного в поступательное движение, и
- 14. Передача винт-гайка скольжения
- 15. Передача обладает простотой конструкции и изготовления, компактностью при высокой нагрузочной способности, высокой надежностью, плавностью и бесшумностью,
- 16. Передачи с гибкой связью Передачи с гибкой связью предназначены для передачи вращательного движения и преобразования поступательного
- 17. Направляющие Направляющими называют конструктивные элементы устрой-ства, обеспечивающие заданное относительное движение элемен-тов механизма. В мехатронных модулях в
- 18. Тормозные устройства и механизмы для выборки люфтов Тормозными называют устройства, которыми снабжают мехатронные модули, для уменьшения
- 19. Механические тормозные устройства – пружинные, резиновые, эластомерные, инерционные и фрикционные. Гидравлические – устройства дроссельного регулирования. Пневматические
- 20. Ко всем типам тормозных устройств предъявляют следующие основные требования: обеспечение заданного закона торможения; безударный останов и
- 21. Электродвигатели мехатронных модулей Применение в мехатронных системах электродвигателей постоянного тока обусловлено такими их преимуществами как: линейность
- 22. В мехатронных модулях линейного движения, которые применяются в многоцелевых станках, комплексах лазерной резки, некоторых видах транспорта,
- 23. Силовые преобразователи Силовые преобразователи применяются в различных мехатронных модулях движения, в которых превращение электрической энергии в
- 24. Для электропривода постоянного тока применяют два типа преобразователей: преобразователи напряжения переменного тока в постоянный (управляемый выпрямитель)
- 25. Микропроцессорные системы управления Микропроцессорная система (МПС) это микро-ЭВМ или вычислительный комплекс (ВК), построенный на основе микропроцессорного
- 26. Сущность применения микропроцессоров заключается в том, что они заменяют цифровые ИС малой и средней степени интеграции
- 27. Устройства и системы, построенные на основе микропроцес-соров, имеют два основных преимущества перед устройствами, реализованными аппаратным способом:
- 28. МПС различаются областями применения, архитектурой и конструктивным исполнением. Архитектуру МПС можно описать тремя составляющими: • состав,
- 29. Современные МПС реализуют архитектуру, которая воплоща-ет, как правило, следующие принципы: • принцип хранимой в памяти программы;
- 30. Важной характеристикой МПС является число центральных процессоров. По этому признаку различают следующие виды МПС: • однопроцессорные
- 31. Микроконтроллеры Особенностью построения современных технических систем, в том числе мехатронных, является широкая автоматизация процессов, контроля их
- 32. Если персональные компьютеры ориентированы на пользователя, то микроконтроллеры − на объект управления. В отличие от микропроцессоров
- 33. Спектр применения МК чрезвычайно широк. В наши дни на их базе создают интеллектуальные датчики, системы управления
- 34. Устройствами ввода в микроконтроллеры являются преобра-зователи информации, а именно датчики, установленные на объек-те управления. Датчики преобразуют
- 35. Устройствами вывода микроконтроллеров являются исполни-тельные механизмы объектов, как правило, это − электронная сис-тема управления электрическими проводами.
- 36. Микроконтроллеры обычно работают в реальном масштабе времени и выполняют ограниченный набор программ, повторяю-щихся во времени. В
- 37. Цифровые сигнальные процессоры Цифровые сигнальные процессоры (Digital Signal Processor – DSP) являются разновидностью микропроцессоров и предназначе-ны
- 38. Вывод: Мехатронный модуль – это функционально и конструктивно самостоятельное изделие для реализации движений с взаимопроникновением и
- 40. Скачать презентацию

Систематика мехатронных модулей
Систематика мехатронных модулей
На рис. 5.1 представлена, одна из известных, классификаций мехатронных модулей по
На рис. 5.1 представлена, одна из известных, классификаций мехатронных модулей по
Рассмотрим мехатронные модули согласно представленной классификации.
Рассмотрим мехатронные модули согласно представленной классификации.
Преобразователи движения
Передача движения от двигателя к выходному звену мехатронного модуля может
Преобразователи движения
Передача движения от двигателя к выходному звену мехатронного модуля может

Реечные передачи
Реечная передача предназначена для преобразования вращательного движения шестерни в поступательное
Реечные передачи
Реечная передача предназначена для преобразования вращательного движения шестерни в поступательное
Планетарные передачи
Планетарными называют передачи, содержащие зубчатые колеса, оси которых подвижны, как
Планетарные передачи
Планетарными называют передачи, содержащие зубчатые колеса, оси которых подвижны, как

Простейшая планетарная передача состоит из центрального солнечного зубчатого колеса с наружными
Простейшая планетарная передача состоит из центрального солнечного зубчатого колеса с наружными
Волновые зубчатые передачи
Работа волновой передачи основана на принципе преобразования параметров движения
Волновые зубчатые передачи
Работа волновой передачи основана на принципе преобразования параметров движения


Недостатками волновых передач являются: ограничение по частотам вращения ведущего вала генератора
Недостатками волновых передач являются: ограничение по частотам вращения ведущего вала генератора
Передача винт-гайка качения
Передача винт-гайка качения (шарико-винтовая передача) предназначена для преобразования вращательного
Передача винт-гайка качения
Передача винт-гайка качения (шарико-винтовая передача) предназначена для преобразования вращательного


Передача винт-гайка скольжения
Передача винт-гайка скольжения
Передача обладает простотой конструкции и изготовления, компактностью при высокой нагрузочной способности,
Передача обладает простотой конструкции и изготовления, компактностью при высокой нагрузочной способности,
Передачи с гибкой связью
Передачи с гибкой связью предназначены для передачи вращательного
Передачи с гибкой связью
Передачи с гибкой связью предназначены для передачи вращательного
Направляющие
Направляющими называют конструктивные элементы устрой-ства, обеспечивающие заданное относительное движение элемен-тов механизма.
В
Направляющие
Направляющими называют конструктивные элементы устрой-ства, обеспечивающие заданное относительное движение элемен-тов механизма.
В
Тормозные устройства и механизмы для выборки люфтов
Тормозными называют устройства, которыми снабжают
Тормозные устройства и механизмы для выборки люфтов
Тормозными называют устройства, которыми снабжают
Механические тормозные устройства – пружинные, резиновые, эластомерные, инерционные и фрикционные.
Гидравлические
Механические тормозные устройства – пружинные, резиновые, эластомерные, инерционные и фрикционные.
Гидравлические

Ко всем типам тормозных устройств предъявляют следующие основные требования: обеспечение заданного
Ко всем типам тормозных устройств предъявляют следующие основные требования: обеспечение заданного
Электродвигатели мехатронных модулей
Применение в мехатронных системах электродвигателей постоянного тока обусловлено такими
Электродвигатели мехатронных модулей
Применение в мехатронных системах электродвигателей постоянного тока обусловлено такими
В мехатронных модулях линейного движения, которые применяются в многоцелевых станках, комплексах
В мехатронных модулях линейного движения, которые применяются в многоцелевых станках, комплексах

Силовые преобразователи
Силовые преобразователи применяются в различных мехатронных модулях движения, в которых
Силовые преобразователи
Силовые преобразователи применяются в различных мехатронных модулях движения, в которых
Для электропривода постоянного тока применяют два типа преобразователей: преобразователи напряжения переменного
Для электропривода постоянного тока применяют два типа преобразователей: преобразователи напряжения переменного
Микропроцессорные системы управления
Микропроцессорная система (МПС) это микро-ЭВМ или вычислительный комплекс (ВК),
Микропроцессорные системы управления
Микропроцессорная система (МПС) это микро-ЭВМ или вычислительный комплекс (ВК),
Сущность применения микропроцессоров заключается в том, что они заменяют цифровые ИС
Сущность применения микропроцессоров заключается в том, что они заменяют цифровые ИС
Устройства и системы, построенные на основе микропроцес-соров, имеют два основных преимущества
Устройства и системы, построенные на основе микропроцес-соров, имеют два основных преимущества
МПС различаются областями применения, архитектурой и конструктивным исполнением. Архитектуру МПС можно
МПС различаются областями применения, архитектурой и конструктивным исполнением. Архитектуру МПС можно
Современные МПС реализуют архитектуру, которая воплоща-ет, как правило, следующие принципы:
• принцип
Современные МПС реализуют архитектуру, которая воплоща-ет, как правило, следующие принципы:
• принцип
Важной характеристикой МПС является число центральных процессоров. По этому признаку различают
Важной характеристикой МПС является число центральных процессоров. По этому признаку различают
Микроконтроллеры
Особенностью построения современных технических систем, в том числе мехатронных, является широкая
Микроконтроллеры
Особенностью построения современных технических систем, в том числе мехатронных, является широкая

Если персональные компьютеры ориентированы на пользователя, то микроконтроллеры − на объект
Если персональные компьютеры ориентированы на пользователя, то микроконтроллеры − на объект
Спектр применения МК чрезвычайно широк. В наши дни на их базе
Спектр применения МК чрезвычайно широк. В наши дни на их базе

Устройствами ввода в микроконтроллеры являются преобра-зователи информации, а именно датчики, установленные
Устройствами ввода в микроконтроллеры являются преобра-зователи информации, а именно датчики, установленные

Устройствами вывода микроконтроллеров являются исполни-тельные механизмы объектов, как правило, это −
Устройствами вывода микроконтроллеров являются исполни-тельные механизмы объектов, как правило, это −
Микроконтроллеры обычно работают в реальном масштабе времени и выполняют ограниченный набор
Микроконтроллеры обычно работают в реальном масштабе времени и выполняют ограниченный набор

Цифровые сигнальные процессоры
Цифровые сигнальные процессоры (Digital Signal Processor – DSP) являются
Цифровые сигнальные процессоры
Цифровые сигнальные процессоры (Digital Signal Processor – DSP) являются
Вывод:
Мехатронный модуль – это функционально и конструктивно самостоятельное изделие для реализации
Вывод:
Мехатронный модуль – это функционально и конструктивно самостоятельное изделие для реализации
 Организация лечебно-эвакуационного обеспечения населения при ликвидации последствий нападения противника
Организация лечебно-эвакуационного обеспечения населения при ликвидации последствий нападения противника Успенский храм
Успенский храм Особенности юридической техники: Мальта, Кипр, Гибралтар
Особенности юридической техники: Мальта, Кипр, Гибралтар С днём рожденья
С днём рожденья «Российский архитектор итальянского происхождения ампир» Карл Иванович Росси
«Российский архитектор итальянского происхождения ампир» Карл Иванович Росси Александр Николаевич Островский Мой дом - театр
Александр Николаевич Островский Мой дом - театр Компания «Петро-Композит». Проект «Зеленый город»
Компания «Петро-Композит». Проект «Зеленый город» ООО «Завод-Новатор как логистическая система Выполнили: Епифанова, Шунайлова, Шалтаева
ООО «Завод-Новатор как логистическая система Выполнили: Епифанова, Шунайлова, Шалтаева История Европейского союза
История Европейского союза  Оформление КГД
Оформление КГД Типы рыночных структур Проект по экономике для студентов 1 курса Авторы: Мельник Анастасия, Корякина Любовь
Типы рыночных структур Проект по экономике для студентов 1 курса Авторы: Мельник Анастасия, Корякина Любовь Болезни легких
Болезни легких  Маршрутизация
Маршрутизация Софийский собор
Софийский собор Коррозия и защита полимерных строительных материалов
Коррозия и защита полимерных строительных материалов Биология Новокуйбышевск
Биология Новокуйбышевск Конфликт Грузии и Абхазии
Конфликт Грузии и Абхазии Презентация "Всемирный банк в Казахстане" - скачать презентации по Экономике
Презентация "Всемирный банк в Казахстане" - скачать презентации по Экономике Технологии программирования (первый семестр)
Технологии программирования (первый семестр) Аттестационная работа. Создание творческого проекта «Кукла-мотанка»
Аттестационная работа. Создание творческого проекта «Кукла-мотанка» Повышение организации труда на предприятии «Фотон»
Повышение организации труда на предприятии «Фотон» Іскерлік қатынастың этикасы
Іскерлік қатынастың этикасы Kim jestem w perspektywie Bożego planu?
Kim jestem w perspektywie Bożego planu? Писанкарство
Писанкарство Контрольно-измерительные приборы
Контрольно-измерительные приборы Виды зубчатых передач
Виды зубчатых передач Презентация "А.С.Пушкин на портретах художников О.Кипренского и В.Тропинина" - скачать презентации по МХК
Презентация "А.С.Пушкин на портретах художников О.Кипренского и В.Тропинина" - скачать презентации по МХК Қазан төңкерісіне дейінгі Қазақстандағы музейлер және оны ұйымдастырушылар
Қазан төңкерісіне дейінгі Қазақстандағы музейлер және оны ұйымдастырушылар