- Общие основания кинематики системы точек

Содержание
- 2. 1. СВЯЗИ 1.1. Свободные и не свободные системы. 1.2. Примеры связей. 1.3. Классификация связей. 2. ОГРАНИЧЕНИЯ,
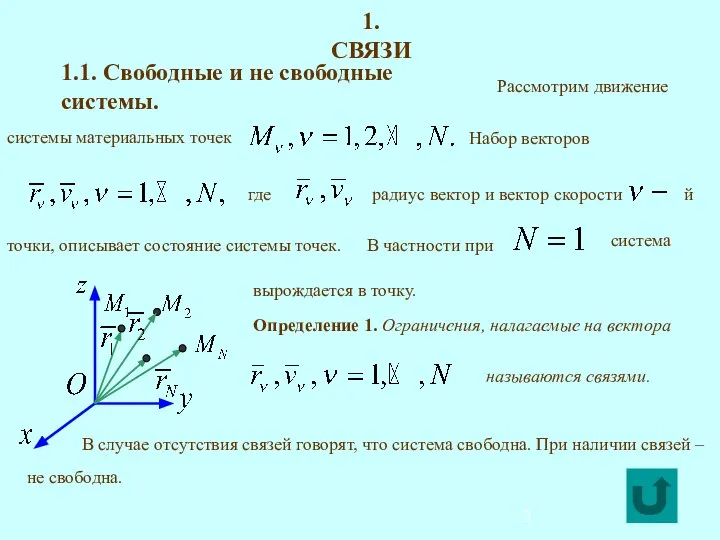
- 3. 1. СВЯЗИ 1.1. Свободные и не свободные системы.
- 4. 1.2. Примеры связей. Тогда связь выражается условием Математическое выражение для связи здесь имеет вид
- 6. 1.3. Классификация связей. В общем случае математическое выражение для связи имеет вид Примеры 1,2,4 – служат
- 7. т. е. к геометрическому виду.
- 8. Обычно ограничиваются изучением лишь случаем линейных по скоростям точек голономных связей
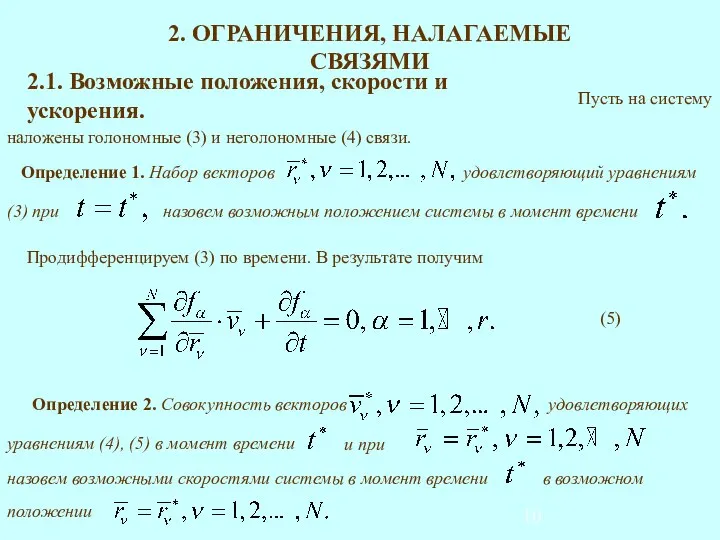
- 10. 2. ОГРАНИЧЕНИЯ, НАЛАГАЕМЫЕ СВЯЗЯМИ 2.1. Возможные положения, скорости и ускорения. Продифференцируем (3) по времени. В результате
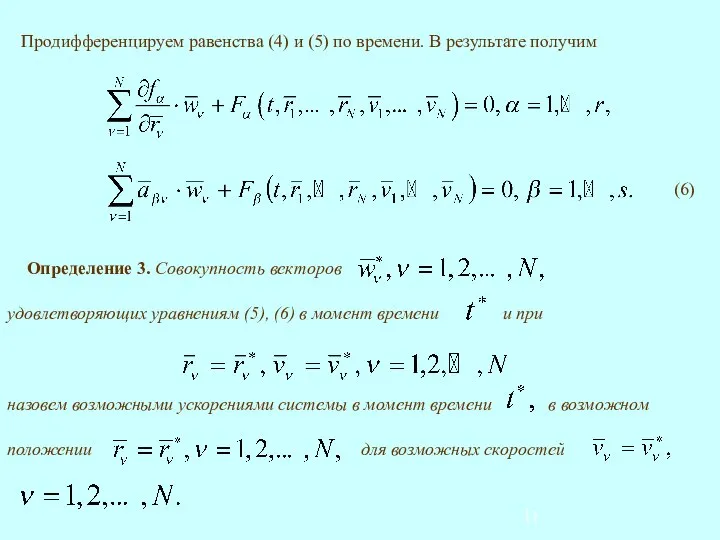
- 11. Продифференцируем равенства (4) и (5) по времени. В результате получим
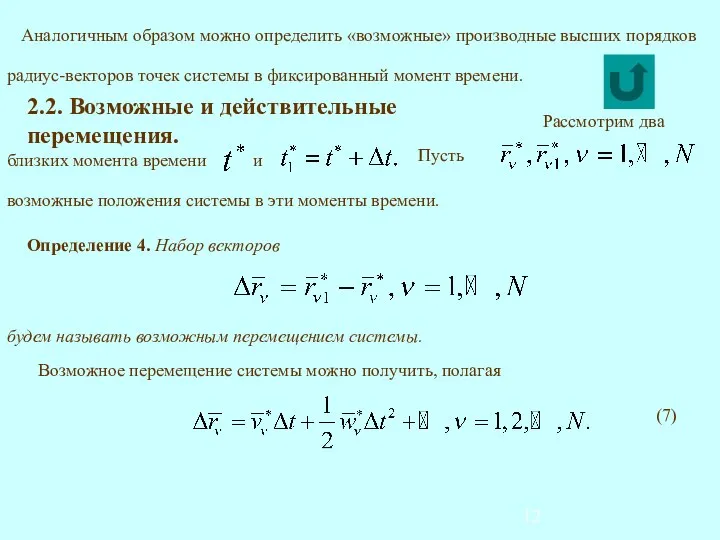
- 12. 2.2. Возможные и действительные перемещения. Определение 4. Набор векторов будем называть возможным перемещением системы. Возможное перемещение
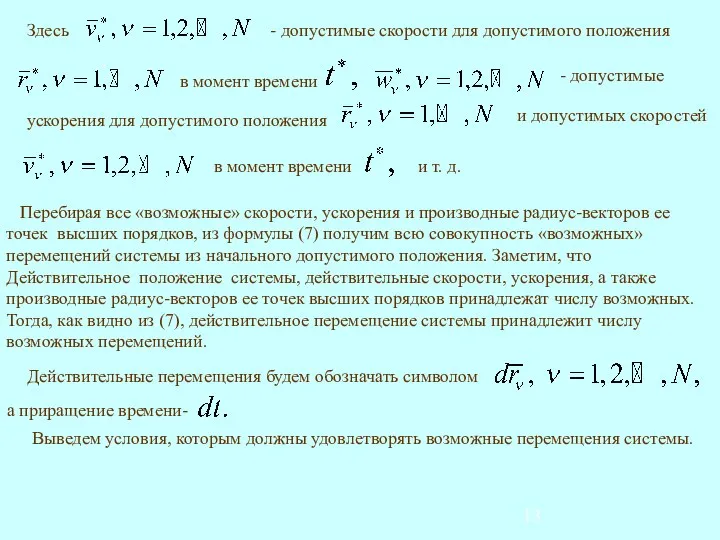
- 13. Перебирая все «возможные» скорости, ускорения и производные радиус-векторов ее точек высших порядков, из формулы (7) получим
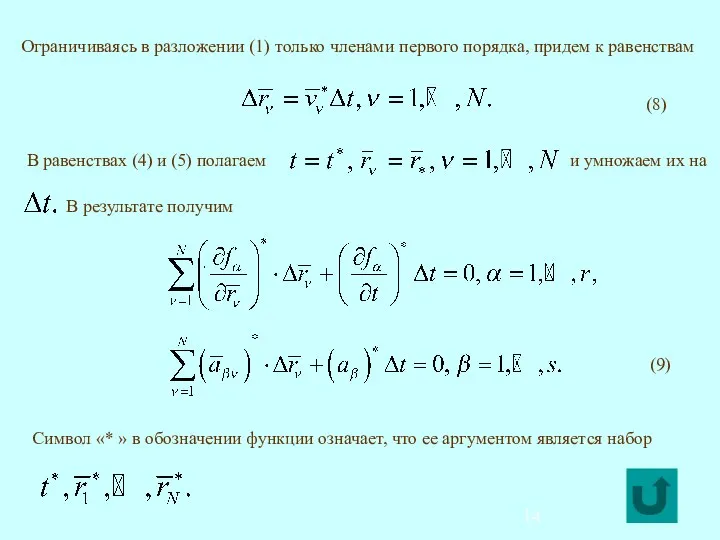
- 14. Ограничиваясь в разложении (1) только членами первого порядка, придем к равенствам
- 15. 2.3. Виртуальные перемещения. Виртуальных перемещений бесконечно много. Виртуальные перемещения, вообще говоря, не являются возможными и совпадают
- 16. 2.4. Варьирование по Журдену и Гауссу. при одинаковых значениях Вычтем из равенства (10) равенство (11). В
- 17. Обозначим и перепишем равенство (12) в виде
- 18. В силу определения допустимых скоростей справедливы равенства
- 19. В силу (15) из последних соотношений вытекает что и означает искомое.
- 20. Из определения допустимых ускорений следует
- 23. Скачать презентацию
1. СВЯЗИ
1.1. Свободные и не свободные системы.
1.2. Примеры связей.
1.3. Классификация
1. СВЯЗИ
1.1. Свободные и не свободные системы.
1.2. Примеры связей.
1.3. Классификация
1. СВЯЗИ
1.1. Свободные и не свободные системы.
1. СВЯЗИ
1.1. Свободные и не свободные системы.

1.2. Примеры связей.
Тогда связь выражается условием
Математическое выражение для связи здесь
1.2. Примеры связей.
Тогда связь выражается условием
Математическое выражение для связи здесь


1.3. Классификация связей.
В общем случае математическое
выражение для связи имеет вид
Примеры
1.3. Классификация связей.
В общем случае математическое
выражение для связи имеет вид
Примеры
т. е. к геометрическому виду.
т. е. к геометрическому виду.

Обычно ограничиваются изучением лишь случаем линейных по скоростям точек
голономных связей
Обычно ограничиваются изучением лишь случаем линейных по скоростям точек
голономных связей

2. ОГРАНИЧЕНИЯ, НАЛАГАЕМЫЕ СВЯЗЯМИ
2.1. Возможные положения, скорости и ускорения.
Продифференцируем (3)
2. ОГРАНИЧЕНИЯ, НАЛАГАЕМЫЕ СВЯЗЯМИ
2.1. Возможные положения, скорости и ускорения.
Продифференцируем (3)
Продифференцируем равенства (4) и (5) по времени. В результате получим
Продифференцируем равенства (4) и (5) по времени. В результате получим
2.2. Возможные и действительные перемещения.
Определение 4. Набор векторов
будем называть
2.2. Возможные и действительные перемещения.
Определение 4. Набор векторов
будем называть
Перебирая все «возможные» скорости, ускорения и производные радиус-векторов ее
точек
Перебирая все «возможные» скорости, ускорения и производные радиус-векторов ее
точек
Ограничиваясь в разложении (1) только членами первого порядка, придем к равенствам
Ограничиваясь в разложении (1) только членами первого порядка, придем к равенствам
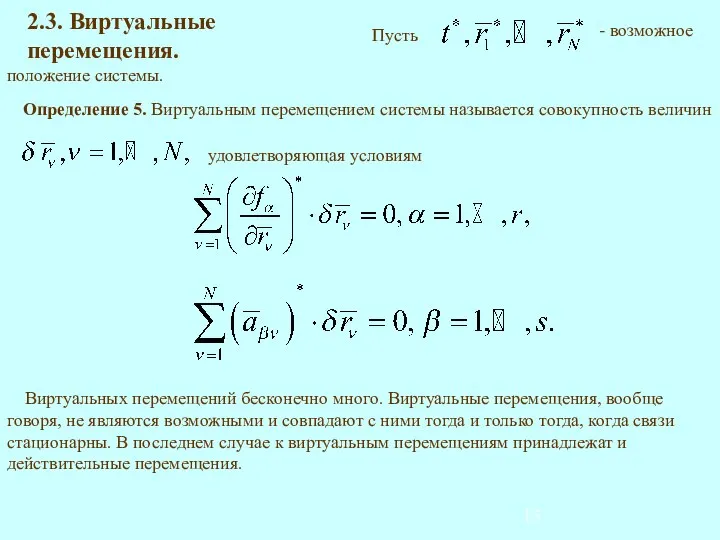
2.3. Виртуальные перемещения.
Виртуальных перемещений бесконечно много. Виртуальные перемещения, вообще
2.3. Виртуальные перемещения.
Виртуальных перемещений бесконечно много. Виртуальные перемещения, вообще
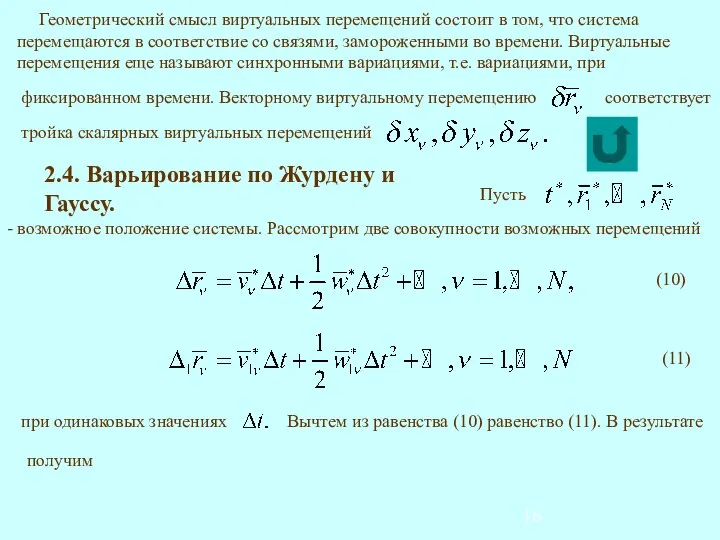
2.4. Варьирование по Журдену и Гауссу.
при одинаковых значениях
Вычтем из
2.4. Варьирование по Журдену и Гауссу.
при одинаковых значениях
Вычтем из

Обозначим
и перепишем равенство (12) в виде
Обозначим
и перепишем равенство (12) в виде
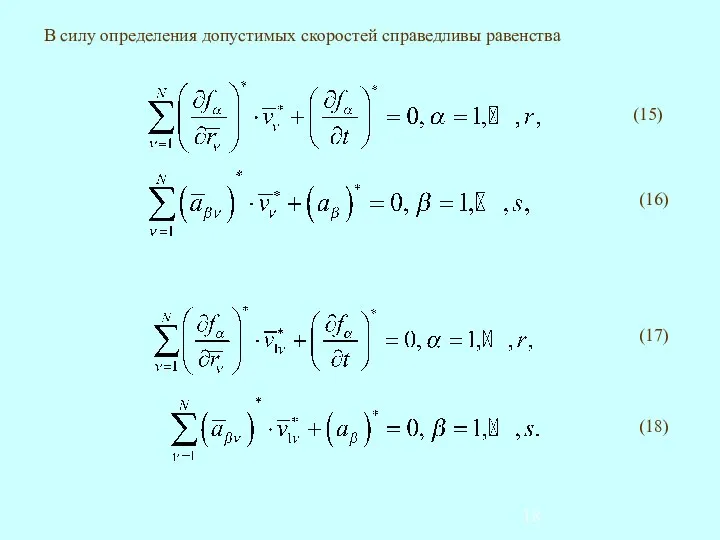
В силу определения допустимых скоростей справедливы равенства
В силу определения допустимых скоростей справедливы равенства
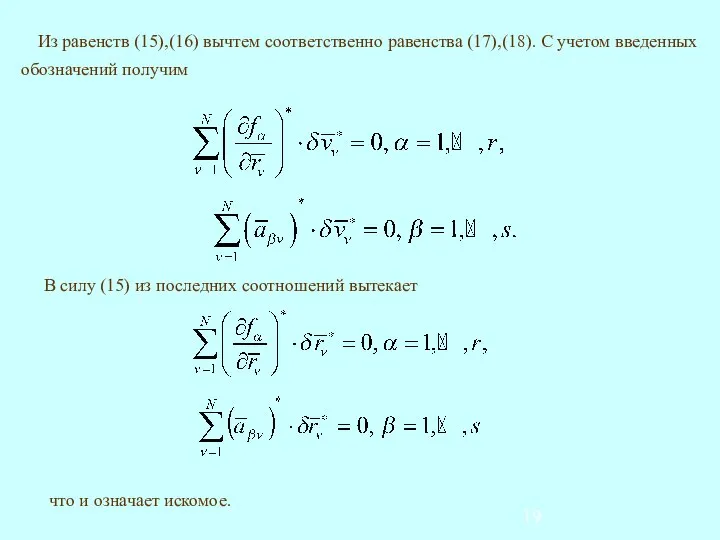
В силу (15) из последних соотношений вытекает
что и означает искомое.
В силу (15) из последних соотношений вытекает
что и означает искомое.
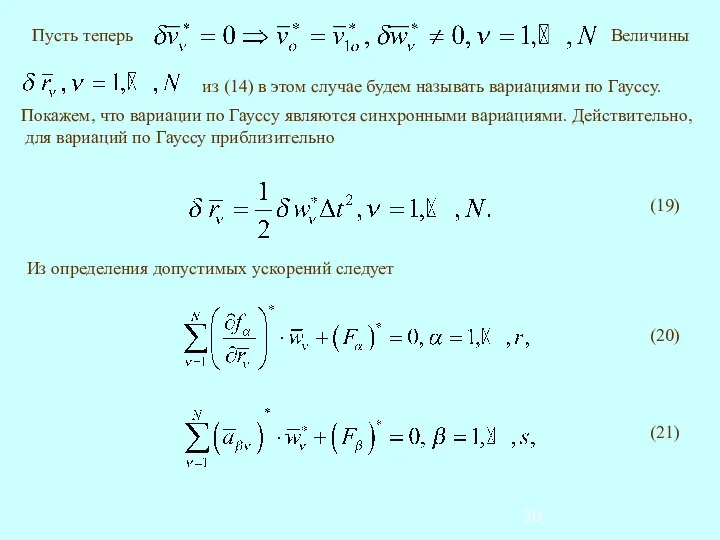
Из определения допустимых ускорений следует
Из определения допустимых ускорений следует

 Лекция 6. Цель как объективная системная категория Содержание лекции: Анализ содержания категории «цель» Целесообразность и пов
Лекция 6. Цель как объективная системная категория Содержание лекции: Анализ содержания категории «цель» Целесообразность и пов Анализ и оценка внешних климатических условий и меры регулирования
Анализ и оценка внешних климатических условий и меры регулирования Problem of doping in sport. (Lecture 7)
Problem of doping in sport. (Lecture 7) Презентация Международное право и мировой правопорядок
Презентация Международное право и мировой правопорядок  О чём рассказывают нам гербы и эмблемы
О чём рассказывают нам гербы и эмблемы С. Ф. Русова – видатний педагог, психолог, громадський діяч.
С. Ф. Русова – видатний педагог, психолог, громадський діяч. Лэпбук «Минем туганнарым» как средство обучения татарскому языку
Лэпбук «Минем туганнарым» как средство обучения татарскому языку Презентация на тему "Дружная семья" - скачать презентации по Педагогике
Презентация на тему "Дружная семья" - скачать презентации по Педагогике Материал к урокам алгебры в 8 классе по теме: Квадратные уравнения. Их решение по формуле.
Материал к урокам алгебры в 8 классе по теме: Квадратные уравнения. Их решение по формуле. Презентация Оценка основных средств
Презентация Оценка основных средств ВОСПАЛИТЕЛЬНЫЕ ЗАБОЛЕВАНИЯ МУЖСКИХ ПОЛОВЫХ ОРГАНОВ
ВОСПАЛИТЕЛЬНЫЕ ЗАБОЛЕВАНИЯ МУЖСКИХ ПОЛОВЫХ ОРГАНОВ Портрет как один из способов знакомства с биографией и творчеством автора
Портрет как один из способов знакомства с биографией и творчеством автора Казақстан ремпубликасынын конституциясы
Казақстан ремпубликасынын конституциясы динозавры 2 класс - презентация для начальной школы_
динозавры 2 класс - презентация для начальной школы_ Страхование ответственности нотариусов
Страхование ответственности нотариусов Рельсовая цепь на железной дороге
Рельсовая цепь на железной дороге Грамматика языка
Грамматика языка Невада-Семей қозғалысы
Невада-Семей қозғалысы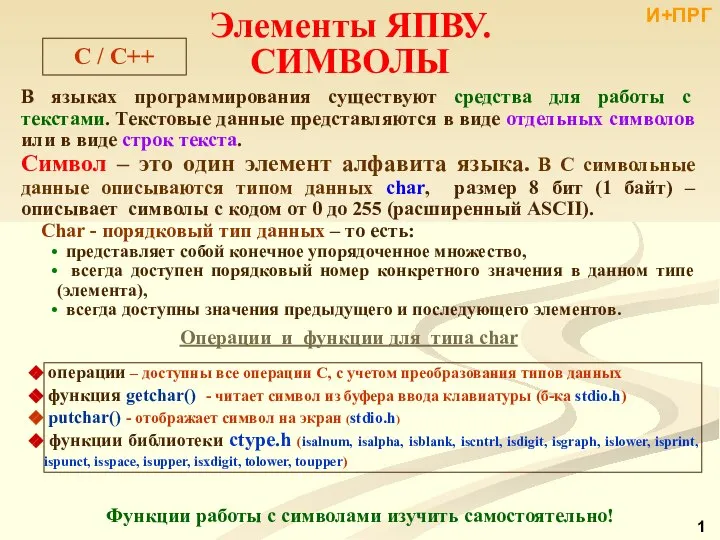 C / С++. Элементы ЯПВУ. Символы
C / С++. Элементы ЯПВУ. Символы Особенности таможенного контроля и таможенного оформления при международных воздушных перевозках
Особенности таможенного контроля и таможенного оформления при международных воздушных перевозках Ukrainian traditions
Ukrainian traditions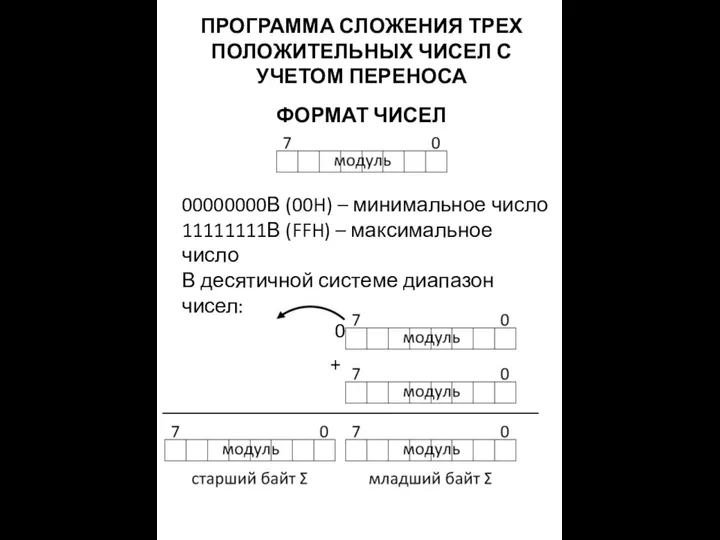 Сложение с переносом
Сложение с переносом Коттедж на 6-ти сотках, молодой сад, с видом на море и горы, в цокольном этаже два гаража, бойлерная, подсобное помещение
Коттедж на 6-ти сотках, молодой сад, с видом на море и горы, в цокольном этаже два гаража, бойлерная, подсобное помещение Презентация на тему "Педагогика как наука об образовании" - скачать презентации по Педагогике
Презентация на тему "Педагогика как наука об образовании" - скачать презентации по Педагогике Дота 2
Дота 2 Преступления против свободы, чести и достоинства личности (ст. 126-1281 УК РФ)
Преступления против свободы, чести и достоинства личности (ст. 126-1281 УК РФ) Современный этап ФСБ
Современный этап ФСБ Построение диаграмм и графиков
Построение диаграмм и графиков