- Основные принципы построения и состав процессоров

Содержание
- 2. Принцип дискретности – основной принцип работы микропроцессорных систем (МПС)
- 3. Цифровые устройства (ЦУ) выполняют различные операции над объектами информации в виде цифровых сигналов (ЦС). Для представления
- 4. Для представления КС в виде электрических сигналов наибольшее распространение получил потенциальный способ, при котором одному из
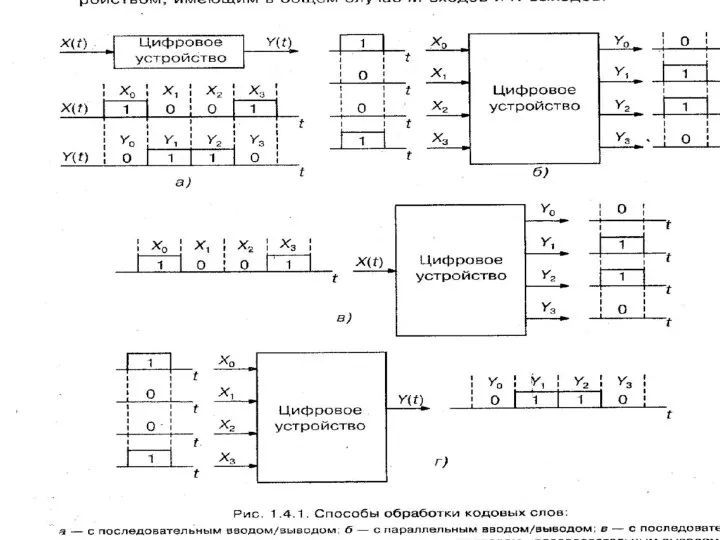
- 5. На рисунке следующего слайда графически представлены ЦСи способы ввода- вывода ЦС в ЦУ и из него:
- 7. Принцип функционирования цифровых сметем (ЦС).
- 8. Работа ЦС связана с выполнением некоторой последовательности микрокоманд (МКК), в совокупности составляющих команду (К), а совокупность
- 9. В отличие от аналоговых систем, в работу которых заложен принцип непрерывности, работа микроконтроллеров (МК), относящихся к
- 10. Рассмотрим последовательность исполнения отдельной МКК: => в начальный момент времени микропроцессорная система (МПС) находится в состоянии
- 11. => новое состояние МПС В запоминает и хранит память; => по завершении выполнения всей предписанной последовательности
- 12. Выполнение команды (К).
- 13. Время, затрачиваемое на выполнение К, называется командным циклом (КЦ). КЦ разбивается на машинные циклы (МЦ). Машинным
- 14. Код команды (КК) представляет собой многоразрядное двоичное число, в котором можно выделить две части: => код
- 15. Процесс выполнения команды (К) можно разбить на отдельные этапы: => в начале первого МЦ по адресу,
- 16. Если для выполнения К не требуется обращения к внешним ЗУ дл считывание операндов из памяти или
- 17. После считывания кода текущей К содержимое программного счетчика (PC) автоматически увеличивается на 1 и более (при
- 19. РЕГИСТРОВАЯ МОДЕЛЬ МИКРОКОНТРОЛЛЕРА
- 20. Функционирование процессора (П)можно представить как процедуры изменения состояния регистров (регистровые пересылки) путем чтения-записи их содержимого. В
- 21. При составлении программ весьма важно знать, какие из регистров МК являются программно-доступными регистрами, в которых можно
- 22. Состав и количество служебных регистров определяется архитектурой МК. К основным служебным регистрам следует отнести: - программный
- 23. Основные классификационные признаки архитектур. По форматам используемых команд (инструкций) можно выделить: => CISC-архитектуру, которая относится к
- 24. =» RISC-архитектуру, которая относится к компьютерам с сокращенным набором команд (Reduced Instruction Set Computer). Появление RISC-архитектуры
- 25. Обращение к внешней памяти в RISC-процессорах используется только в операциях загрузки данных в ΡΟΗ или пересылки
- 26. По способу организации выборки команд и данных различают два вида архитектур: ·=> Принстонская архитектура, или архитектура
- 27. => Гарвардская архитектура, особенностью которой является физическое разделение памяти на память команд (программ) и память данных.
- 28. Гарвардская архитектура получила широкое применение в МК— специализированных МПС для управления различными объектами, а также во
- 29. ПРОЦЕССОР КАК СОВОКУПНОСТЬ ОПЕРАЦИОННОГО И УПРАВЛЯЮЩЕГО АВТОМАТОВ (ОА) И (УА)
- 30. Процессор состоит из двух автоматов: - операционного (ОА) и - управляющего (УА). ОА можно представить в
- 31. УА генерирует последовательность управляющих сигналов из множества Y, предписанную МКПР и соответствующую значениям ЛУ X. При
- 33. ОПЕРАЦИОННЫЙ АВТОМАТ ДЛЯ УМНОЖЕНИЯ ДВОИЧНЫХ ЧИСЕЛ Принцип построения операционного автомата.
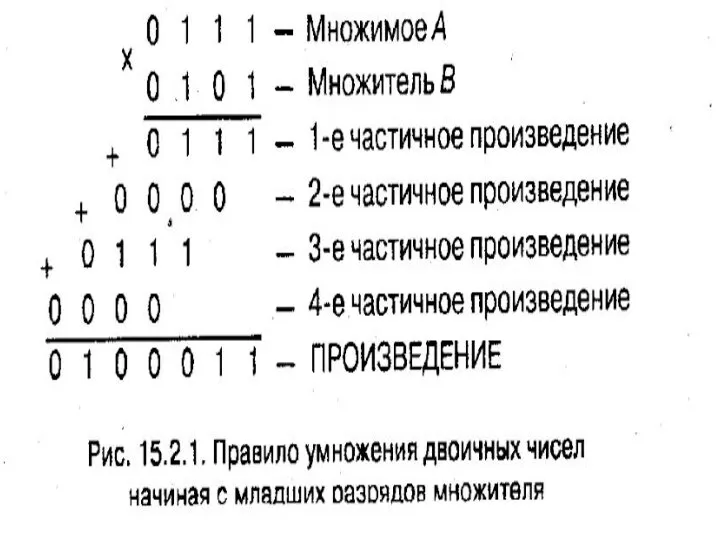
- 34. Для обоснования принципа построения операционного автомата воспользуемся правилом умножения двоичных чисел, при котором частичные произведения формируются,
- 36. Выбор аппаратных средств для реализации операции умножения двоичных чисел. Прежде всего необходимо иметь в виду, что
- 37. В исходном состоянии регистр RG2 загружен множителем Б, причем выходной сигнал должен соответствовать самому младшему разряду
- 38. В исходном состоянии регистр RG2 загружен множителем Б, причем выходной сигнал должен соответствовать самому младшему разряду
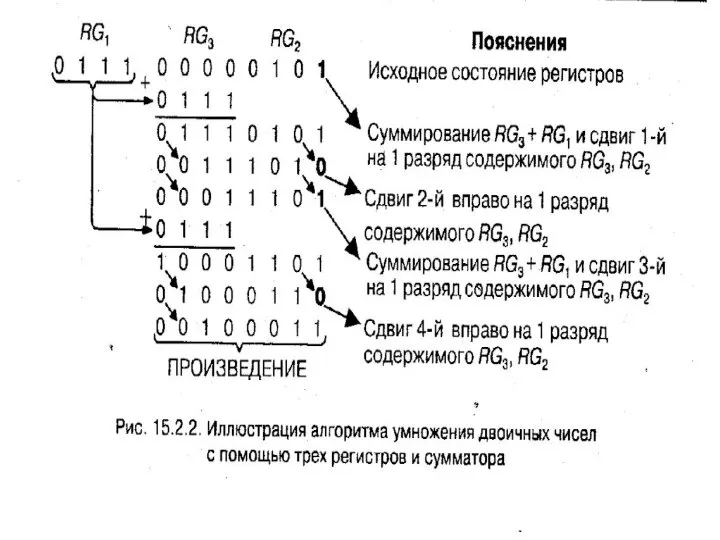
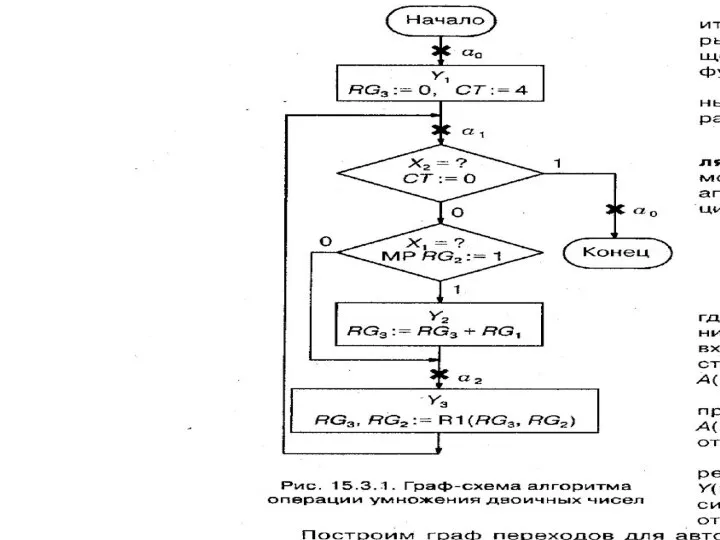
- 39. Алгоритм умножения двоичных чисел. На рис. 15.2.2 показан процесс умножения с использованием трех регистров и сумматора.
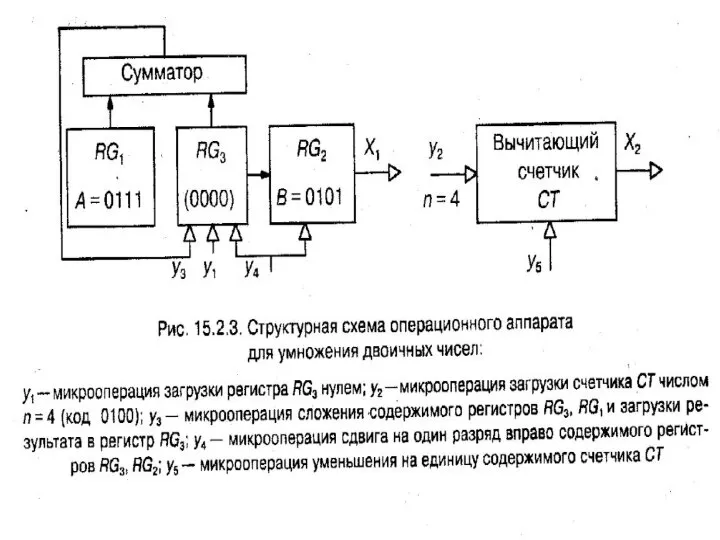
- 41. Если МР ЯС2 =Х, = 1, то выполняется микрооперация сложения содержимого регистров ЯС3 и ЯС,, и
- 43. Составной регистр из RG3 и RG2 образован путем соединения выхода триггера младшего разряда RG3 с входом
- 44. УПРАВЛЯЮЩИЙ АВТОМАТ СО СХЕМНОЙ ЛОГИКОЙ
- 45. Рассмотрим основные этапы построения такого УА. Построение граф-схемы алгоритма операции умножения. Граф-схема алгоритма представляет собой связанный
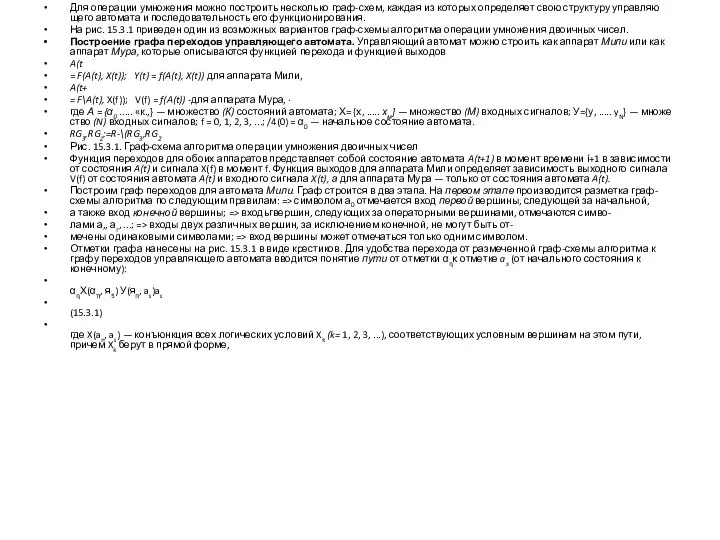
- 47. Для операции умножения можно построить несколько граф-схем, каждая из которых определяет свою структуру управляющего автомата и
- 48. если из данной вершины путь выходит по стрелке, отмеченной значением 1, и в инверсной форме, если
- 49. Составление таблицы функционирования комбинационной схемы. Задание работы управляющего автомата с помощью графа переходов обеспечивает наглядность. Однако
- 50. Из табл. 15.3.2 видно, что младшие разряды О0 кодов аа, а, изменяются (0-И), старшие О, сохраняют
- 51. Запись логических выражений для комбинационной схемы. Для каждой строки структурной табл. 15.3.2 запишем логическое выражение в
- 52. . УПРАВЛЯЮЩИЙ АВТОМАТ С ПРОГРАММИРУЕМОЙ ЛОГИКОЙ Принцип построения управляющего автомата. В рассмотренном выше управляющем автомате со
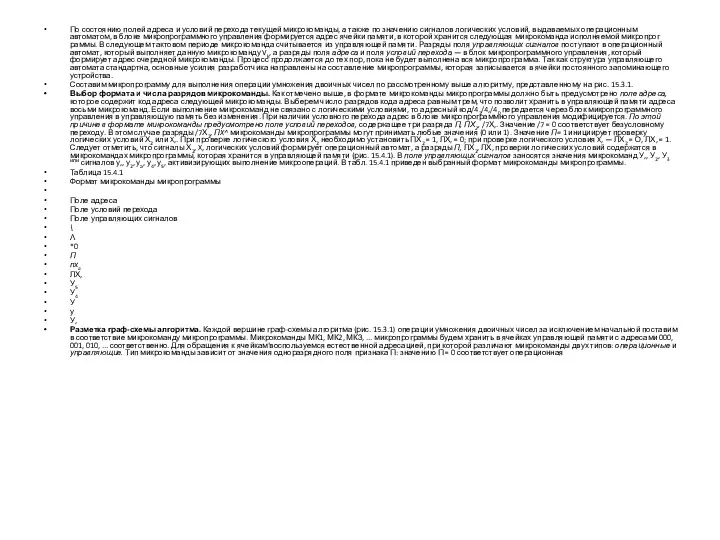
- 53. По состоянию полей адреса и условий перехода текущей микрокоманды, а также по значению сигналов логических условий,
- 54. микрокоманда, значению Π = 1 — управляющая микрокоманда. Операционная микрокоманда выполняется операционным автоматом под управлением сигналов
- 55. Следовательно, микрокоманда МКЗ с адресом 010 заносится в вершину проверки логического условия X, = ?, а
- 56. В ячейку с адресом 000 помещаем МК1, которая в операционном автомате выполняет загрузку, предусмотренную управляющими сигналами
- 57. 8, 16 и 32 РАЗРЯДНЫЕ МИКРОКОНТРОЛЛЕРЫ
- 58. Микроконтроллеры (МК) - это класс специализированных микропроцессоров (МКП) для реализации разнообразных устройств управления (в том числе
- 59. Кроме этого в МК входят такие специализированные устройства, как блок формирования сигналов с широтно-импульсной модуляцией, контроллер
- 60. 8-разрядные МК являются наиболее простыми и дешевыми изделиями этого класса, ориентированными на использование в относительно несложных
- 61. Для 8-разрядных МК характерна Гарвардская архитектура. => с отдельной внутренней памятью для хранения программ, в качестве
- 62. В случае необходимости имеется возможность дополнительно подключать внешнюю память команд и данных объемом до 64-256 Кбайт.
- 63. 16-разрядные микроконтроллеры помимо повышенной разрядности обрабатываемых данных характеризуются: => повышенной производительностью; => расширенной системой команд и
- 64. 32-разрядные МК ориентированы на применение в системах управления сложными объектами промышленной автоматики (средствами комплексной автоматизации производства,
- 65. 32-разрядные микроконтроллеры содержат: => высокопроизводительный CISC- или RISC-процессор, соответствующий по своим возможностям младшим моделям микропроцессоров общего
- 66. => внутреннюю память команд емкостью до десятков килобайт и память данных емкостью до нескольких килобайт; =>
- 67. УСТРОЙСТВА ПАМЯТИ И ХРАНЕНИЯ ДАННЫХ
- 68. Назначение и виды устройств. Устройства памяти, или память, МК предназначены для кратковременного и долговременного хранения информации.
- 69. Внутренняя память подразделяется: => на оперативную память, информация в которой может изменяться процессором в любой момент
- 71. Скачать презентацию
Принцип дискретности – основной принцип работы микропроцессорных систем (МПС)
Принцип дискретности – основной принцип работы микропроцессорных систем (МПС)
Цифровые устройства (ЦУ) выполняют различные операции над объектами информации в виде
Цифровые устройства (ЦУ) выполняют различные операции над объектами информации в виде
Для представления КС в виде электрических сигналов наибольшее распространение получил
Для представления КС в виде электрических сигналов наибольшее распространение получил
На рисунке следующего слайда графически представлены ЦСи способы ввода- вывода ЦС
На рисунке следующего слайда графически представлены ЦСи способы ввода- вывода ЦС
Принцип функционирования цифровых сметем (ЦС).
Работа ЦС связана с выполнением некоторой последовательности микрокоманд (МКК), в совокупности
Работа ЦС связана с выполнением некоторой последовательности микрокоманд (МКК), в совокупности
В отличие от аналоговых систем, в работу которых заложен принцип непрерывности,
В отличие от аналоговых систем, в работу которых заложен принцип непрерывности,
Рассмотрим последовательность исполнения отдельной МКК:
=> в начальный момент времени микропроцессорная система
Рассмотрим последовательность исполнения отдельной МКК:
=> в начальный момент времени микропроцессорная система
=> новое состояние МПС В запоминает и хранит память;
=> по
=> новое состояние МПС В запоминает и хранит память;
=> по
Выполнение команды (К).
Время, затрачиваемое на выполнение К, называется командным циклом (КЦ). КЦ разбивается
Время, затрачиваемое на выполнение К, называется командным циклом (КЦ). КЦ разбивается
Код команды (КК) представляет собой многоразрядное двоичное число, в котором можно
Код команды (КК) представляет собой многоразрядное двоичное число, в котором можно
Процесс выполнения команды (К) можно разбить на отдельные этапы:
=> в начале
Процесс выполнения команды (К) можно разбить на отдельные этапы:
=> в начале
Если для выполнения К не требуется обращения к внешним ЗУ дл
Если для выполнения К не требуется обращения к внешним ЗУ дл
После считывания кода текущей К содержимое программного счетчика (PC) автоматически увеличивается
После считывания кода текущей К содержимое программного счетчика (PC) автоматически увеличивается

РЕГИСТРОВАЯ МОДЕЛЬ МИКРОКОНТРОЛЛЕРА
РЕГИСТРОВАЯ МОДЕЛЬ МИКРОКОНТРОЛЛЕРА
Функционирование процессора (П)можно представить как процедуры изменения состояния регистров (регистровые пересылки)
Функционирование процессора (П)можно представить как процедуры изменения состояния регистров (регистровые пересылки)
При составлении программ весьма важно знать, какие из регистров МК являются
При составлении программ весьма важно знать, какие из регистров МК являются
Состав и количество служебных регистров определяется архитектурой МК.
К основным служебным
Состав и количество служебных регистров определяется архитектурой МК.
К основным служебным
Основные классификационные признаки архитектур.
По форматам используемых команд (инструкций) можно выделить:
=>
Основные классификационные признаки архитектур.
По форматам используемых команд (инструкций) можно выделить:
=>
=» RISC-архитектуру, которая относится к компьютерам с сокращенным набором команд (Reduced
=» RISC-архитектуру, которая относится к компьютерам с сокращенным набором команд (Reduced
Обращение к внешней памяти в RISC-процессорах используется только в операциях загрузки
Обращение к внешней памяти в RISC-процессорах используется только в операциях загрузки
По способу организации выборки команд и данных различают два вида архитектур:
·=>
По способу организации выборки команд и данных различают два вида архитектур:
·=>
=> Гарвардская архитектура, особенностью которой является физическое разделение памяти на память
=> Гарвардская архитектура, особенностью которой является физическое разделение памяти на память
Гарвардская архитектура получила широкое применение в МК— специализированных МПС для управления
Гарвардская архитектура получила широкое применение в МК— специализированных МПС для управления
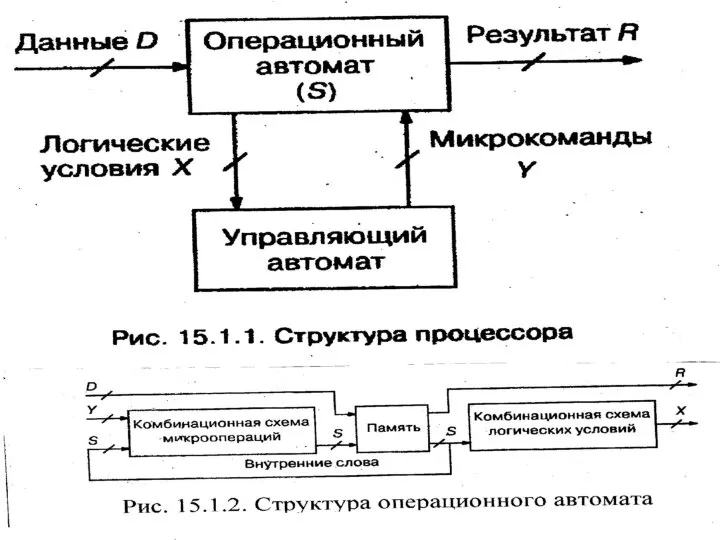
ПРОЦЕССОР КАК СОВОКУПНОСТЬ ОПЕРАЦИОННОГО И УПРАВЛЯЮЩЕГО АВТОМАТОВ (ОА) И (УА)
Процессор состоит из двух автоматов:
- операционного (ОА) и
- управляющего
Процессор состоит из двух автоматов:
- операционного (ОА) и
- управляющего
УА генерирует последовательность управляющих сигналов из множества Y, предписанную МКПР и
УА генерирует последовательность управляющих сигналов из множества Y, предписанную МКПР и
ОПЕРАЦИОННЫЙ АВТОМАТ ДЛЯ УМНОЖЕНИЯ ДВОИЧНЫХ ЧИСЕЛ
Принцип построения операционного автомата.
Принцип построения операционного автомата.
Для обоснования принципа построения операционного автомата воспользуемся правилом умножения двоичных чисел,
Для обоснования принципа построения операционного автомата воспользуемся правилом умножения двоичных чисел,
Выбор аппаратных средств для реализации операции умножения двоичных чисел. Прежде всего
Выбор аппаратных средств для реализации операции умножения двоичных чисел. Прежде всего
В исходном состоянии регистр RG2 загружен множителем Б, причем выходной сигнал
В исходном состоянии регистр RG2 загружен множителем Б, причем выходной сигнал
В исходном состоянии регистр RG2 загружен множителем Б, причем выходной сигнал
В исходном состоянии регистр RG2 загружен множителем Б, причем выходной сигнал
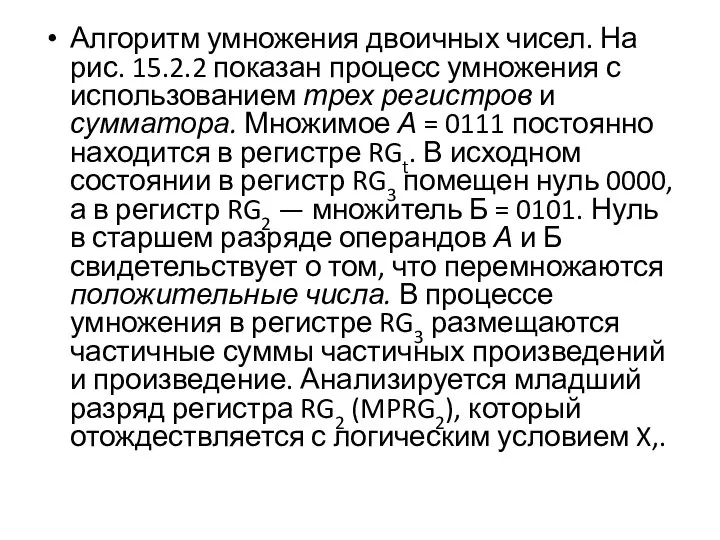
Алгоритм умножения двоичных чисел. На рис. 15.2.2 показан процесс умножения с
Алгоритм умножения двоичных чисел. На рис. 15.2.2 показан процесс умножения с
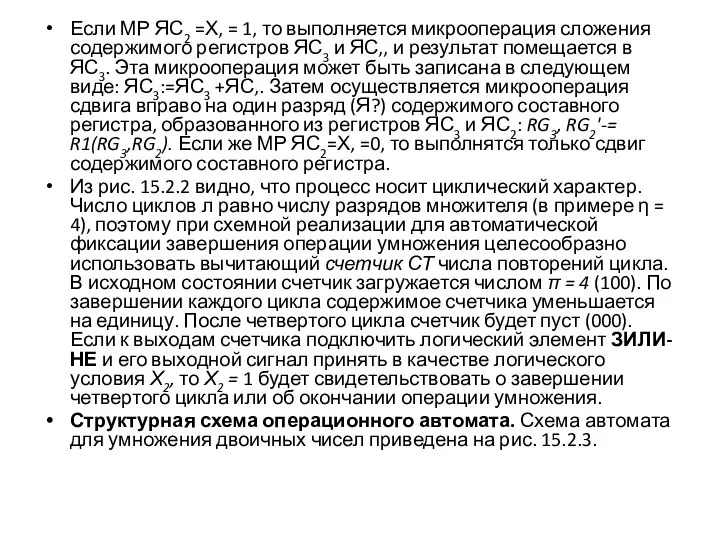
Если МР ЯС2 =Х, = 1, то выполняется микрооперация сложения содержимого
Если МР ЯС2 =Х, = 1, то выполняется микрооперация сложения содержимого
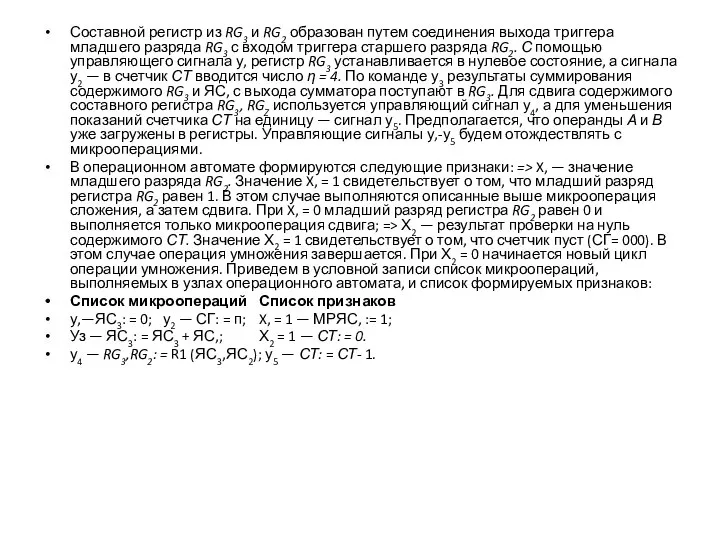
Составной регистр из RG3 и RG2 образован путем соединения выхода триггера
Составной регистр из RG3 и RG2 образован путем соединения выхода триггера
УПРАВЛЯЮЩИЙ АВТОМАТ СО СХЕМНОЙ ЛОГИКОЙ
Рассмотрим основные этапы построения такого УА.
Построение граф-схемы алгоритма операции умножения. Граф-схема
Рассмотрим основные этапы построения такого УА.
Построение граф-схемы алгоритма операции умножения. Граф-схема
Для операции умножения можно построить несколько граф-схем, каждая из которых определяет
Для операции умножения можно построить несколько граф-схем, каждая из которых определяет
если из данной вершины путь выходит по стрелке, отмеченной значением 1,
если из данной вершины путь выходит по стрелке, отмеченной значением 1,

Составление таблицы функционирования комбинационной схемы. Задание работы управляющего автомата с помощью
Составление таблицы функционирования комбинационной схемы. Задание работы управляющего автомата с помощью
Из табл. 15.3.2 видно, что младшие разряды О0 кодов аа, а,
Из табл. 15.3.2 видно, что младшие разряды О0 кодов аа, а,
Запись логических выражений для комбинационной схемы. Для каждой строки структурной табл.
Запись логических выражений для комбинационной схемы. Для каждой строки структурной табл.
. УПРАВЛЯЮЩИЙ АВТОМАТ С ПРОГРАММИРУЕМОЙ ЛОГИКОЙ
Принцип построения управляющего автомата. В рассмотренном
. УПРАВЛЯЮЩИЙ АВТОМАТ С ПРОГРАММИРУЕМОЙ ЛОГИКОЙ
Принцип построения управляющего автомата. В рассмотренном
По состоянию полей адреса и условий перехода текущей микрокоманды, а также
По состоянию полей адреса и условий перехода текущей микрокоманды, а также
микрокоманда, значению Π = 1 — управляющая микрокоманда. Операционная микрокоманда выполняется
микрокоманда, значению Π = 1 — управляющая микрокоманда. Операционная микрокоманда выполняется
Следовательно, микрокоманда МКЗ с адресом 010 заносится в вершину проверки логического
Следовательно, микрокоманда МКЗ с адресом 010 заносится в вершину проверки логического
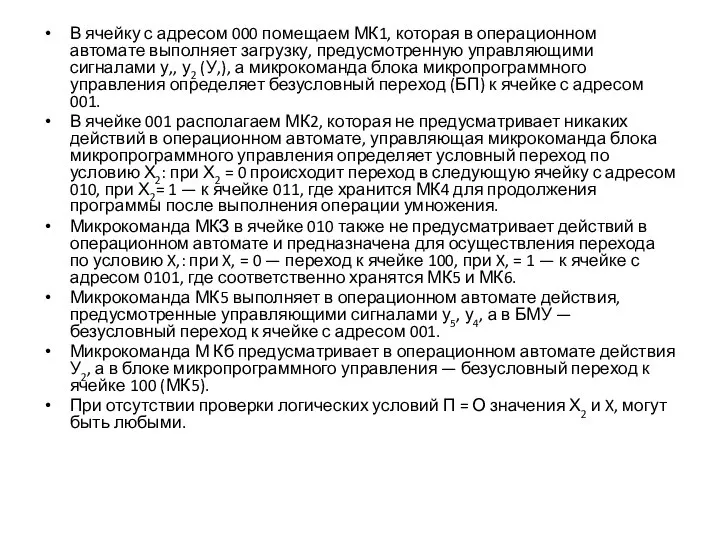
В ячейку с адресом 000 помещаем МК1, которая в операционном автомате
В ячейку с адресом 000 помещаем МК1, которая в операционном автомате
8, 16 и 32 РАЗРЯДНЫЕ МИКРОКОНТРОЛЛЕРЫ
Микроконтроллеры (МК) - это класс специализированных микропроцессоров (МКП) для реализации разнообразных
Микроконтроллеры (МК) - это класс специализированных микропроцессоров (МКП) для реализации разнообразных
Кроме этого в МК входят такие специализированные устройства, как блок формирования
Кроме этого в МК входят такие специализированные устройства, как блок формирования
8-разрядные МК являются наиболее простыми и дешевыми изделиями этого класса, ориентированными
8-разрядные МК являются наиболее простыми и дешевыми изделиями этого класса, ориентированными
Для 8-разрядных МК характерна Гарвардская архитектура.
=> с отдельной внутренней памятью для
Для 8-разрядных МК характерна Гарвардская архитектура.
=> с отдельной внутренней памятью для
В случае необходимости имеется возможность дополнительно подключать внешнюю память команд и
В случае необходимости имеется возможность дополнительно подключать внешнюю память команд и
16-разрядные микроконтроллеры помимо повышенной разрядности обрабатываемых данных характеризуются:
=> повышенной производительностью;
16-разрядные микроконтроллеры помимо повышенной разрядности обрабатываемых данных характеризуются:
=> повышенной производительностью;
32-разрядные МК ориентированы на применение в системах управления сложными объектами промышленной
32-разрядные МК ориентированы на применение в системах управления сложными объектами промышленной
32-разрядные микроконтроллеры содержат:
=> высокопроизводительный CISC- или RISC-процессор, соответствующий по своим возможностям
32-разрядные микроконтроллеры содержат:
=> высокопроизводительный CISC- или RISC-процессор, соответствующий по своим возможностям
=> внутреннюю память команд емкостью до десятков килобайт и память данных
=> внутреннюю память команд емкостью до десятков килобайт и память данных
УСТРОЙСТВА ПАМЯТИ И ХРАНЕНИЯ ДАННЫХ
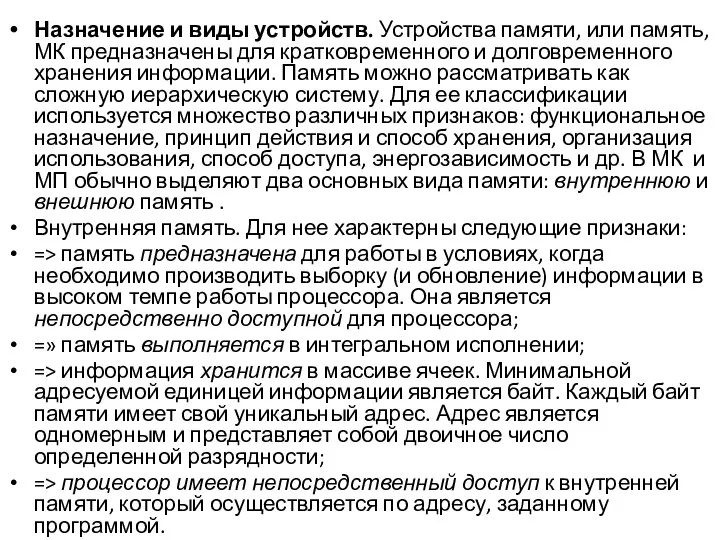
Назначение и виды устройств. Устройства памяти, или память, МК предназначены для
Назначение и виды устройств. Устройства памяти, или память, МК предназначены для
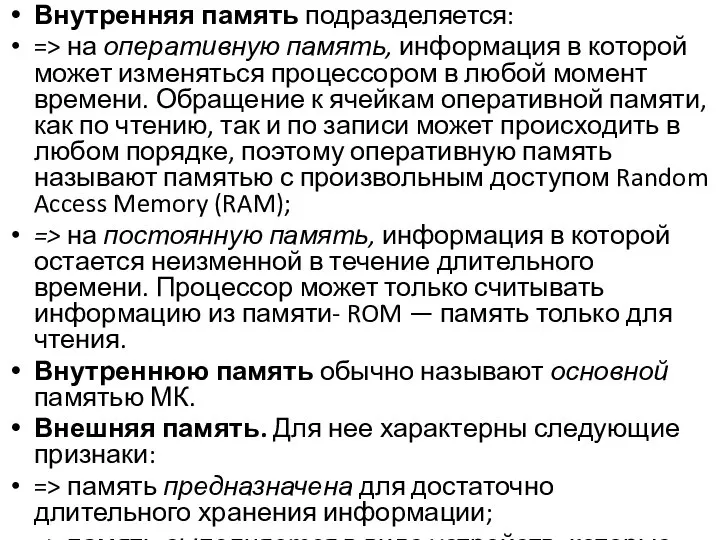
Внутренняя память подразделяется:
=> на оперативную память, информация в которой может изменяться
Внутренняя память подразделяется:
=> на оперативную память, информация в которой может изменяться
 Достопримечательности Лондона
Достопримечательности Лондона SQL-запрос
SQL-запрос Патоморфологическая диагностика sh
Патоморфологическая диагностика sh Историческая типология культуры (заключение)
Историческая типология культуры (заключение) ПРОЕКТ “СТОЛИЧНА МРЕЖА НА УЧИЛИЩНИ ЕВРОПЕЙСКИ КЛУБОВЕ” Оперативна програма „Развитие на човешките ресурси”, съфинансирана от Европейския социален фонд Проект BG051PO001/07/4.2-01/585 Енергетиката на бъдещето
ПРОЕКТ “СТОЛИЧНА МРЕЖА НА УЧИЛИЩНИ ЕВРОПЕЙСКИ КЛУБОВЕ” Оперативна програма „Развитие на човешките ресурси”, съфинансирана от Европейския социален фонд Проект BG051PO001/07/4.2-01/585 Енергетиката на бъдещето Строки в C#
Строки в C# Хранение документов
Хранение документов ЗАДЕРЖАНА КРУПНАЯ ПАРТИЯ КОНТРАБАНДНЫХ ИКОН Выполнили : Сулейменова, Сорокина
ЗАДЕРЖАНА КРУПНАЯ ПАРТИЯ КОНТРАБАНДНЫХ ИКОН Выполнили : Сулейменова, Сорокина Femeia în știință și cultură
Femeia în știință și cultură Причины возникновения экстремизма и терроризма
Причины возникновения экстремизма и терроризма О реализации национального проекта «Культура» в Пермском крае
О реализации национального проекта «Культура» в Пермском крае Внешние инженерные коммуникации (ВИК)
Внешние инженерные коммуникации (ВИК) Официально деловой стиль русского языка
Официально деловой стиль русского языка Группы обобщающих статистических показателей
Группы обобщающих статистических показателей Экономические показатели предприятия
Экономические показатели предприятия  Государство древних майя
Государство древних майя Применение математической статистики в научной и практической деятельности
Применение математической статистики в научной и практической деятельности Познавательные процессы
Познавательные процессы Цифровые системы коммутации
Цифровые системы коммутации Дистанционное обучение детей-инвалидов в Ставропольском крае ГОУ ДПО «Ставропольский краевой институт повышения квалификации р
Дистанционное обучение детей-инвалидов в Ставропольском крае ГОУ ДПО «Ставропольский краевой институт повышения квалификации р Презентация Функции трудового права
Презентация Функции трудового права 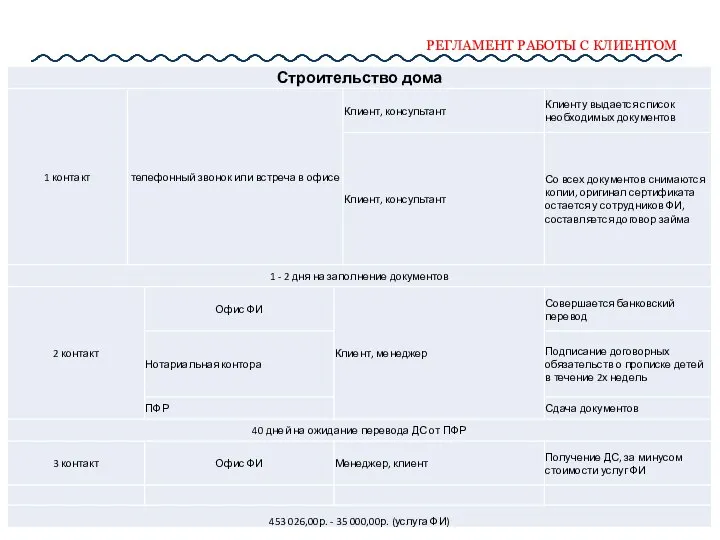 Регламент работы с клиентом. Строительство дома
Регламент работы с клиентом. Строительство дома Юпитер
Юпитер Удивительное и невероятное. Двойственные картинки.
Удивительное и невероятное. Двойственные картинки. Изображения изделий и их обозначения при выполнении графических конструкторских документов
Изображения изделий и их обозначения при выполнении графических конструкторских документов Плоский прямой изгиб
Плоский прямой изгиб ИЗДЕРЖКИ ПРОИЗВОДСТВА И ПРИБЫЛЬ
ИЗДЕРЖКИ ПРОИЗВОДСТВА И ПРИБЫЛЬ Литературное чтение 2 класс К.И. Чуковский «Путаница» Автор работы: Трегубенко Ирина Алексеевна МОУ «СОШ № 9 Г.Енисейск Краснояр
Литературное чтение 2 класс К.И. Чуковский «Путаница» Автор работы: Трегубенко Ирина Алексеевна МОУ «СОШ № 9 Г.Енисейск Краснояр