- Промышленные роботы

Содержание
- 2. Знакомьтесь –РОБОТЫ! Робот- машина с человекоподобным поведением, которая частично или полностью выполняет функции человека при взаимодействии
- 3. Вместо человека. Металлургия Химическая промышленность Микрохирургия Легкая промышленность Горнодобывающая промышленность Сфера обслуживания Атомная промышленность Машиностроение Космос
- 4. Что такое промышленный робот? Промышленный робот (ПР) – автоматическая машина, представляющая собой совокупность манипулятора и перепрограммируемого
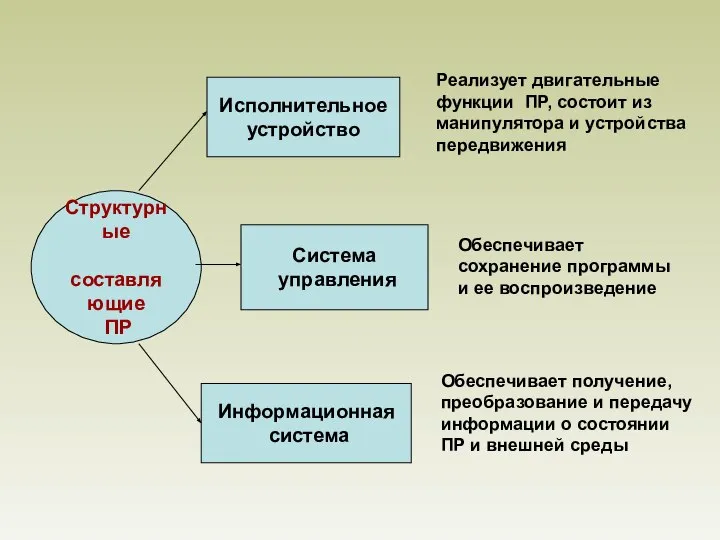
- 5. Структурные составляющие ПР Исполнительное устройство Система управления Информационная система Реализует двигательные функции ПР, состоит из манипулятора
- 6. Основные технические показатели ПР. Назначение Грузоподъемность Число рук Число программируемых координат Тип системы управления Объем памяти
- 7. По конструктивно - технологическому признаку ПР делятся на две группы: ПРОИЗВОДСТВЕННЫЕ ПР – РОБОТЫ, УЧАСТВУЮЩИЕ В
- 9. Скачать презентацию
Знакомьтесь –РОБОТЫ!
Робот- машина с человекоподобным поведением, которая частично или полностью выполняет
Знакомьтесь –РОБОТЫ!
Робот- машина с человекоподобным поведением, которая частично или полностью выполняет

Вместо человека.
Металлургия
Химическая промышленность
Микрохирургия
Легкая промышленность
Горнодобывающая промышленность
Сфера обслуживания
Атомная промышленность
Машиностроение
Космос
Строительная помышленность
Вместо человека.
Металлургия
Химическая промышленность
Микрохирургия
Легкая промышленность
Горнодобывающая промышленность
Сфера обслуживания
Атомная промышленность
Машиностроение
Космос
Строительная помышленность
Что такое промышленный робот?
Промышленный робот (ПР) – автоматическая машина, представляющая собой
Что такое промышленный робот?
Промышленный робот (ПР) – автоматическая машина, представляющая собой
Структурные
составляющие
ПР
Исполнительное
устройство
Система
управления
Информационная
система
Реализует двигательные функции ПР, состоит из
Структурные
составляющие
ПР
Исполнительное
устройство
Система
управления
Информационная
система
Реализует двигательные функции ПР, состоит из
Основные технические показатели ПР.
Назначение
Грузоподъемность
Число рук
Число программируемых координат
Тип системы управления
Объем памяти
Скорость
Основные технические показатели ПР.
Назначение
Грузоподъемность
Число рук
Число программируемых координат
Тип системы управления
Объем памяти
Скорость
По конструктивно - технологическому признаку ПР делятся на две группы:
ПРОИЗВОДСТВЕННЫЕ ПР
По конструктивно - технологическому признаку ПР делятся на две группы:
ПРОИЗВОДСТВЕННЫЕ ПР
 ПЕРВАЯ ПОМОЩЬ ПРИ РАНЕНИИ. ПОВЯЗКИ
ПЕРВАЯ ПОМОЩЬ ПРИ РАНЕНИИ. ПОВЯЗКИ  Инструменты Стратегического планирования
Инструменты Стратегического планирования Умножение десятичных дробей - презентация по Алгебре
Умножение десятичных дробей - презентация по Алгебре Параметрический стабилизатор напряжения
Параметрический стабилизатор напряжения Психология цвета в интерьере
Психология цвета в интерьере Реакционно-порошковый бетон
Реакционно-порошковый бетон Электрический привод
Электрический привод Сравнительный анализ. Выключатели в литом корпусе LSIS vs Hyundai
Сравнительный анализ. Выключатели в литом корпусе LSIS vs Hyundai Комплексные соединения
Комплексные соединения Микроконтроллердің құрылымы
Микроконтроллердің құрылымы Классификация автоматизированных систем и требований по защите информации
Классификация автоматизированных систем и требований по защите информации Привод устройства сцепления автомобиля Камаз
Привод устройства сцепления автомобиля Камаз Русская матрёшка
Русская матрёшка Хореография как третий урок физкультуры МБОУ СОШ №4 Учитель – Кученова Татьяна Николаевна
Хореография как третий урок физкультуры МБОУ СОШ №4 Учитель – Кученова Татьяна Николаевна Все начинается с тебя
Все начинается с тебя Театр и киноискусство 20 века
Театр и киноискусство 20 века  Визуальная система программирования Delphi. Язык программирования Object Pascal
Визуальная система программирования Delphi. Язык программирования Object Pascal Инструкция по работе с ISD Mobile
Инструкция по работе с ISD Mobile Инерционное удержание плазмы. Лазерный термоядерный синтез. Пузырьковый термоядерный синтез. Мюонный катализ.
Инерционное удержание плазмы. Лазерный термоядерный синтез. Пузырьковый термоядерный синтез. Мюонный катализ. Современные бетоны и технологии. Эра добавок
Современные бетоны и технологии. Эра добавок Известные Филологи и их деятельность
Известные Филологи и их деятельность Kanland. History of Kanland
Kanland. History of Kanland Презентация "Времена года. Палитра цветов" - скачать презентации по МХК_
Презентация "Времена года. Палитра цветов" - скачать презентации по МХК_ Цвет и эмоции
Цвет и эмоции  Кейс – метод как педагогическая технология Никитин Валерий Яковлевич, д.п.н., профессор
Кейс – метод как педагогическая технология Никитин Валерий Яковлевич, д.п.н., профессор Эконометрика Лекция 5
Эконометрика Лекция 5 Корпоративное право
Корпоративное право Гостевой этикет. Деловые приемы. Формы поведения на приемах. Правила рассадки. Правила сервировки
Гостевой этикет. Деловые приемы. Формы поведения на приемах. Правила рассадки. Правила сервировки