- Регулирование частоты вращения асинхронных двигателей с фазным ротором

Содержание
- 2. 13.1. Регулирование частоты вращения асинхронных двигателей с фазным ротором. Вопрос о регулировании частоты вращения трехфазных асинхронных
- 3. Из выражения частоты вращения асинхронного двигателя следует, что при постоянном статическом моменте Мс на валу двигателя
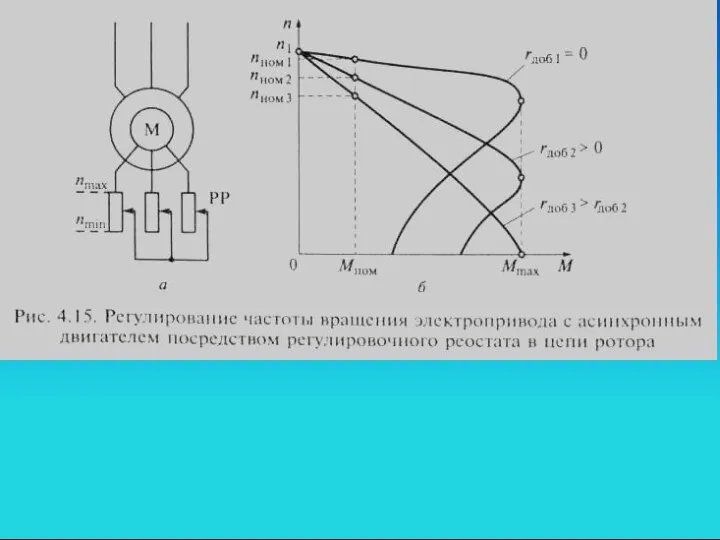
- 4. Реостатное регулирование асинхронных двигателей с фазным ротором. В асинхронных двигателях с фазным ротором частоту вращения регулируют
- 6. При увеличении сопротивления реостата возрастает критическое скольжение sкp, при этом максимальный момент Мmax, а следовательно, и
- 7. При дальнейшем увеличении сопротивления регулировочного реостата до значения rдоб3> rдоб2 двигатель переходит в режим другой, более
- 8. Диапазон регулирования получается широким, но изменение частоты вращения возможно только в сторону уменьшения от синхронной. Одновременно
- 9. 13.2. Регулирование частоты вращения трехфазных асинхронных двигателей с короткозамкнутым ротором изменением числа полюсов в обмотке статора
- 10. В трехскоростном двигателе на статоре размещают одну обмотку с фиксированным числом полюсов и одну полюсно-переключаемую. Если
- 11. Схема «звезда/двойная звезда» (Y/YY) дает изменение числа пар полюсов в отношении 2:I (рис. 4.16, а). Эта
- 12. Схемы переключения целесообразно применять в электроприводе с постоянно действующим моментом нагрузки при любой частоте вращения. Механические
- 14. Схема «звезда/звезда» (Y/Y) также дает изменение числа пар полюсов в отношении 2:1 (рис. 4.16, б), но
- 15. Механические характеристики двигателя для рассмотренных схем переключения числа полюсов представлены на рис. 4.16, б. Все эти
- 16. Достоинством этого способа регулирования является сохранение высоких экономических показателей при переходе с одной частоты вращения на
- 17. 13.3. Регулирование частоты вращения асинхронных двигателей изменением частоты питающего напряжения. В связи с разработкой и широким
- 18. Анализируя выражение максимального момента асинхронного двигателя и принимая во внимание, что т1=3, а индуктивное сопротивление короткого
- 19. Из этого выражения следует, что с изменением частоты питающего напряжения f меняются максимальный момент двигателя, а
- 20. Если статический момент Мс неизменен, и частота вращения в электроприводе регулируется при соблюдении условия постоянства момента
- 21. Из выражения (4.44) следует, что . Форма механических характеристик асинхронного двигателя для этого случая показана на
- 22. В этих условиях возрастание частоты тока не сопровождается ростом напряжения, так как его оставляют равным номинальному
- 23. Этому режиму на рис. 4.17, а соответствует механическая характеристика при частоте тока f13>f1. Потребляемая двигателем при
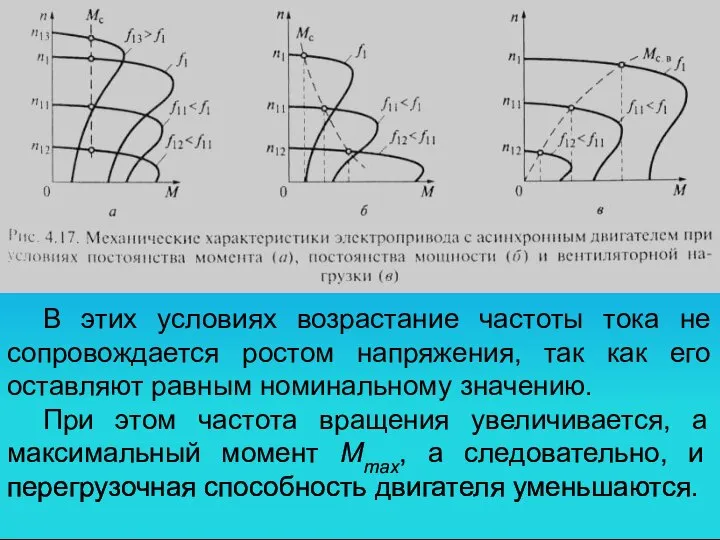
- 24. Если же график статического момента нагрузки Мс имеет вид, показанный на рис. 4.17, б, и регулирование
- 25. Механические характеристики асинхронного двигателя для условия постоянства мощности представлены на рис. 4.17, б. Электромагнитный момент в
- 26. Механические характеристики для частотного регулирования представлены на рис. 4.17, в. В этом случае момент растет пропорционально
- 28. Управляющий сигнал Uy поступает на вход СИФУ из системы автоматического регулирования (САР). Этот сигнал несет информацию
- 29. Сигнал Uf поступает на инвертор АИ и определяет необходимое значение частоты переменного тока f1 на выходе
- 30. В результате помимо основной гармоники с частотой f1 выходное напряжение ПЧ содержит высшие гармоники. Это является
- 31. Но несмотря на этот недостаток, применение ПЧ для частотного регулирования асинхронных двигателей является прогрессивной мерой, улучшающей
- 32. Работа асинхронного двигателя при минимальной частоте вращения ограничивается ухудшением условий охлаждения двигателей с самовентиляцией, к которым
- 33. 13.4. Регулирование частоты вращения асинхронных двигателей изменением подводимого напряжения При изменении подводимого к обмотке статора напряжения
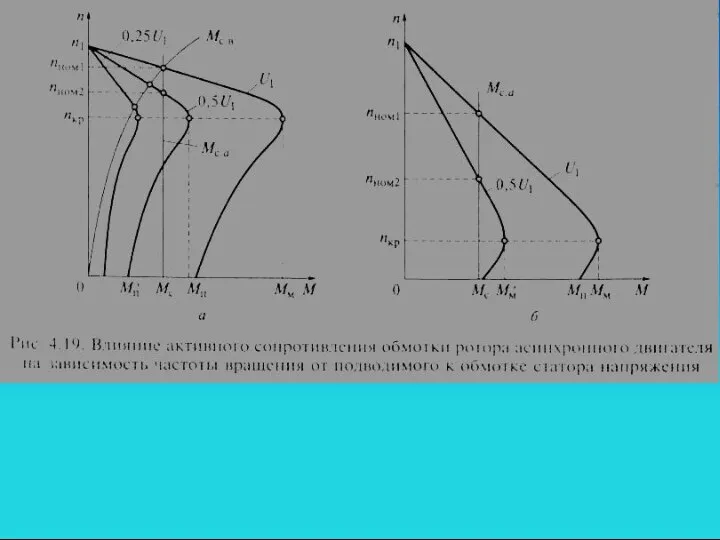
- 35. Несколько лучше этот метод реализуется в асинхронных двигателях с повышенным скольжением (повышенным сопротивлением короткозамкнутой обмотки ротора),
- 36. Но при этом возрастают электрические потери в обмотке ротора, величина которых пропорциональна скольжению s: где Рэм
- 37. Неблагоприятный режим работы асинхронных двигателей при регулировании частоты вращения изменением напряжения U1 обусловлен тем, что ток
- 38. В итоге для получения небольшой частоты вращения требуется значительная величина тока I1. Следствием таких неблагоприятных соотношений
- 39. Следовательно, пусковой момент и момент при небольшой частоте вращения двигателя создается сравнительно небольшой силой тока. Изменять
- 41. Рабочие обмотки дросселя РО создают в линейных проводах питания двигателя индуктивное сопротивление XL, при этом напряжение
- 42. С увеличением тока управления усиливается магнитное насыщение сердечников дросселя и сопротивление XL рабочих обмоток понижается (напряжение
- 43. Более рациональным является использование тиристорных регуляторов напряжения (ТРН). Силовая часть такого регулятора состоит из шести тиристоров
- 44. Управление тиристорами осуществляется системой импульсно-фазового управления (СИФУ) посредством импульсов управления Uи у с требуемым углом управления
- 45. Если угол управления α=0°, то напряжение на выходе ТРН равно напряжению на входе (падение напряжения на
- 46. По сравнению с управляемыми тиристорными выпрямителями тиристорные регуляторы напряжения переменного тока намного проще, так как в
- 47. Управление таким ТРН осуществляется импульсами СИФУ, схема которого усложняется возросшим количеством каналов управления. Для вращения двигателя
- 49. Скачать презентацию
13.1. Регулирование частоты вращения асинхронных двигателей с фазным ротором.
Вопрос о регулировании
13.1. Регулирование частоты вращения асинхронных двигателей с фазным ротором.
Вопрос о регулировании
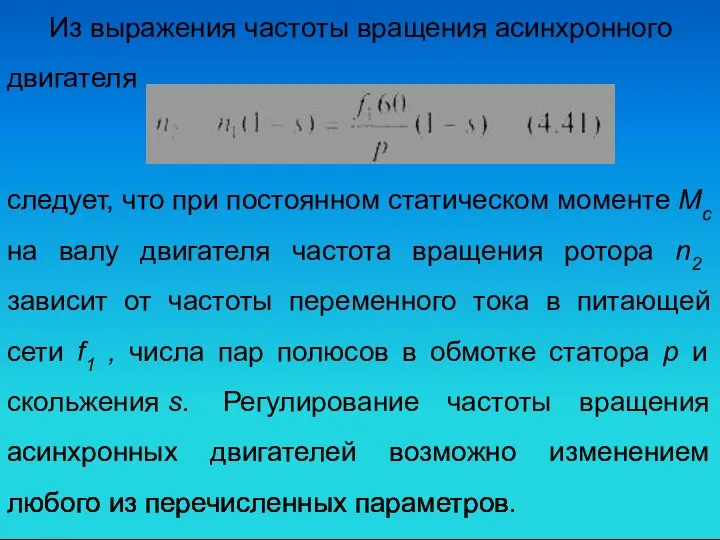
Из выражения частоты вращения асинхронного двигателя
следует, что при постоянном статическом моменте
Из выражения частоты вращения асинхронного двигателя
следует, что при постоянном статическом моменте
Реостатное регулирование асинхронных двигателей с фазным ротором. В асинхронных двигателях с
Реостатное регулирование асинхронных двигателей с фазным ротором. В асинхронных двигателях с
При увеличении сопротивления реостата возрастает критическое скольжение sкp, при этом максимальный
При увеличении сопротивления реостата возрастает критическое скольжение sкp, при этом максимальный
При дальнейшем увеличении сопротивления регулировочного реостата до значения rдоб3> rдоб2 двигатель
При дальнейшем увеличении сопротивления регулировочного реостата до значения rдоб3> rдоб2 двигатель
Диапазон регулирования получается широким, но изменение частоты вращения возможно только в
Диапазон регулирования получается широким, но изменение частоты вращения возможно только в
13.2. Регулирование частоты вращения трехфазных асинхронных двигателей с короткозамкнутым ротором изменением
13.2. Регулирование частоты вращения трехфазных асинхронных двигателей с короткозамкнутым ротором изменением
В трехскоростном двигателе на статоре размещают одну обмотку с фиксированным числом
В трехскоростном двигателе на статоре размещают одну обмотку с фиксированным числом
Схема «звезда/двойная звезда» (Y/YY) дает изменение числа пар полюсов в отношении
Схема «звезда/двойная звезда» (Y/YY) дает изменение числа пар полюсов в отношении
Схемы переключения целесообразно применять в электроприводе с постоянно действующим моментом нагрузки
Схемы переключения целесообразно применять в электроприводе с постоянно действующим моментом нагрузки
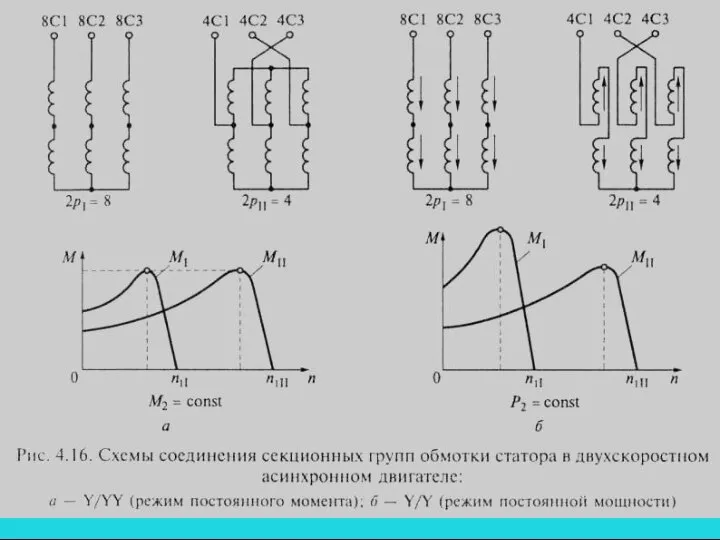
Схема «звезда/звезда» (Y/Y) также дает изменение числа пар полюсов в отношении
Схема «звезда/звезда» (Y/Y) также дает изменение числа пар полюсов в отношении
Механические характеристики двигателя для рассмотренных схем переключения числа полюсов представлены на
Механические характеристики двигателя для рассмотренных схем переключения числа полюсов представлены на
Достоинством этого способа регулирования является сохранение высоких экономических показателей при переходе
Достоинством этого способа регулирования является сохранение высоких экономических показателей при переходе
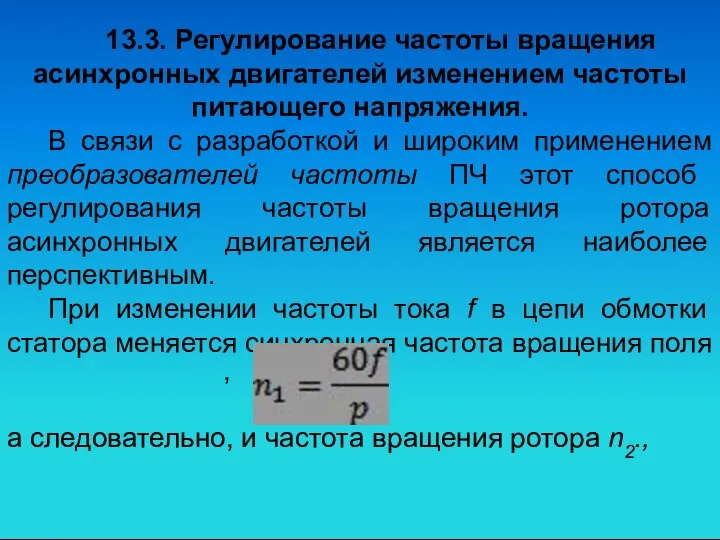
13.3. Регулирование частоты вращения асинхронных двигателей изменением частоты питающего напряжения.
В связи
13.3. Регулирование частоты вращения асинхронных двигателей изменением частоты питающего напряжения.
В связи
Анализируя выражение максимального момента асинхронного двигателя и принимая во внимание, что
Анализируя выражение максимального момента асинхронного двигателя и принимая во внимание, что
Из этого выражения следует, что с изменением частоты питающего напряжения f
Из этого выражения следует, что с изменением частоты питающего напряжения f
Если статический момент Мс неизменен, и частота вращения в электроприводе регулируется
Если статический момент Мс неизменен, и частота вращения в электроприводе регулируется
Из выражения (4.44) следует, что .
Форма механических характеристик асинхронного двигателя
Из выражения (4.44) следует, что .
Форма механических характеристик асинхронного двигателя
В этих условиях возрастание частоты тока не сопровождается ростом напряжения, так
В этих условиях возрастание частоты тока не сопровождается ростом напряжения, так
Этому режиму на рис. 4.17, а соответствует механическая характеристика при частоте
Этому режиму на рис. 4.17, а соответствует механическая характеристика при частоте
Если же график статического момента нагрузки Мс имеет вид, показанный на
Если же график статического момента нагрузки Мс имеет вид, показанный на
Механические характеристики асинхронного двигателя для условия постоянства мощности представлены на рис.
Механические характеристики асинхронного двигателя для условия постоянства мощности представлены на рис.
Механические характеристики для частотного регулирования представлены на рис. 4.17, в. В
Механические характеристики для частотного регулирования представлены на рис. 4.17, в. В
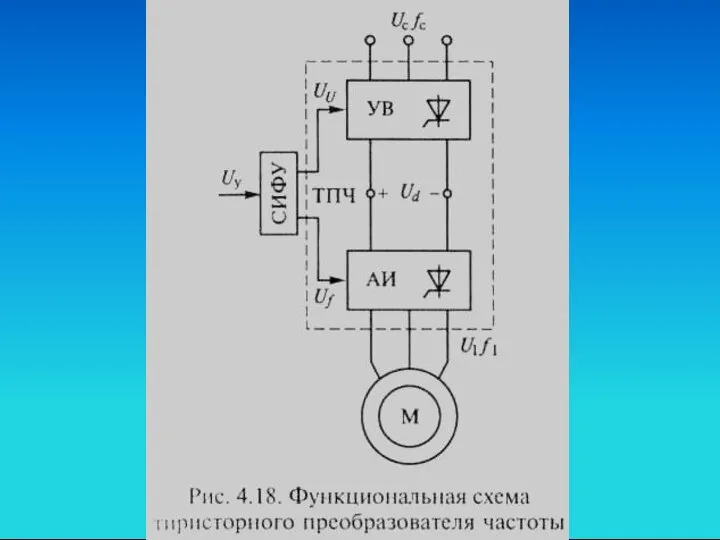
Управляющий сигнал Uy поступает на вход СИФУ из системы автоматического регулирования
Управляющий сигнал Uy поступает на вход СИФУ из системы автоматического регулирования
Сигнал Uf поступает на инвертор АИ и определяет необходимое значение частоты
Сигнал Uf поступает на инвертор АИ и определяет необходимое значение частоты
В результате помимо основной гармоники с частотой f1 выходное напряжение ПЧ
В результате помимо основной гармоники с частотой f1 выходное напряжение ПЧ
Но несмотря на этот недостаток, применение ПЧ для частотного регулирования асинхронных
Но несмотря на этот недостаток, применение ПЧ для частотного регулирования асинхронных
Работа асинхронного двигателя при минимальной частоте вращения ограничивается ухудшением условий охлаждения
Работа асинхронного двигателя при минимальной частоте вращения ограничивается ухудшением условий охлаждения
13.4. Регулирование частоты вращения асинхронных двигателей изменением подводимого напряжения
При изменении подводимого
13.4. Регулирование частоты вращения асинхронных двигателей изменением подводимого напряжения
При изменении подводимого
Несколько лучше этот метод реализуется в асинхронных двигателях с повышенным скольжением
Несколько лучше этот метод реализуется в асинхронных двигателях с повышенным скольжением
Но при этом возрастают электрические потери в обмотке ротора, величина которых
Но при этом возрастают электрические потери в обмотке ротора, величина которых
Неблагоприятный режим работы асинхронных двигателей при регулировании частоты вращения изменением напряжения
Неблагоприятный режим работы асинхронных двигателей при регулировании частоты вращения изменением напряжения
В итоге для получения небольшой частоты вращения требуется значительная величина тока
В итоге для получения небольшой частоты вращения требуется значительная величина тока
Следовательно, пусковой момент и момент при небольшой частоте вращения двигателя создается
Следовательно, пусковой момент и момент при небольшой частоте вращения двигателя создается
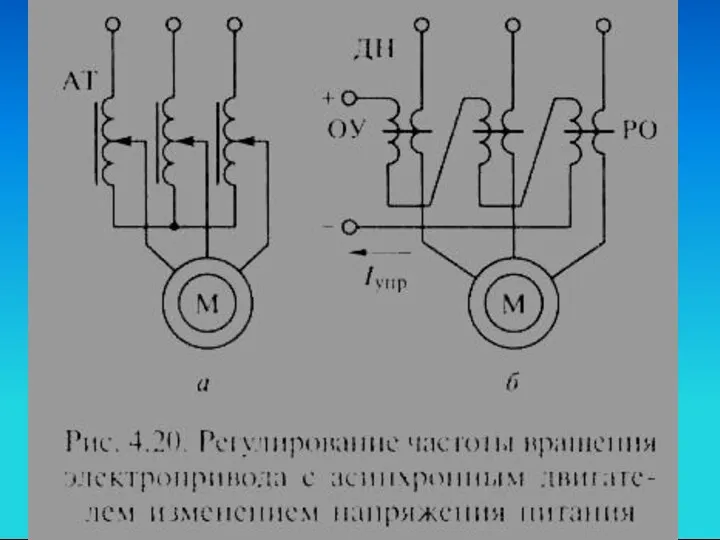
Рабочие обмотки дросселя РО создают в линейных проводах питания двигателя индуктивное
Рабочие обмотки дросселя РО создают в линейных проводах питания двигателя индуктивное
С увеличением тока управления усиливается магнитное насыщение сердечников дросселя и сопротивление
С увеличением тока управления усиливается магнитное насыщение сердечников дросселя и сопротивление
Более рациональным является использование тиристорных регуляторов напряжения (ТРН). Силовая часть такого
Более рациональным является использование тиристорных регуляторов напряжения (ТРН). Силовая часть такого
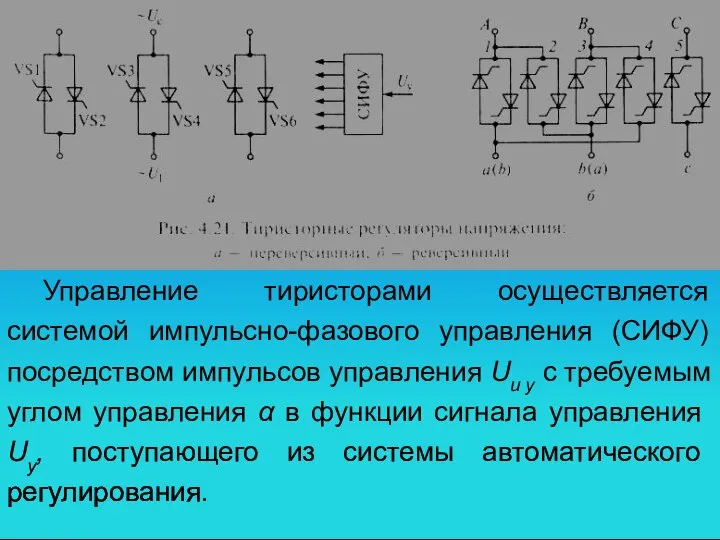
Управление тиристорами осуществляется системой импульсно-фазового управления (СИФУ) посредством импульсов управления Uи
Управление тиристорами осуществляется системой импульсно-фазового управления (СИФУ) посредством импульсов управления Uи
Если угол управления α=0°, то напряжение на выходе ТРН равно напряжению
Если угол управления α=0°, то напряжение на выходе ТРН равно напряжению
По сравнению с управляемыми тиристорными выпрямителями тиристорные регуляторы напряжения переменного тока
По сравнению с управляемыми тиристорными выпрямителями тиристорные регуляторы напряжения переменного тока
Управление таким ТРН осуществляется импульсами СИФУ, схема которого усложняется возросшим количеством
Управление таким ТРН осуществляется импульсами СИФУ, схема которого усложняется возросшим количеством
 Резюме (цель предпринимательского проекта) Настоящая предпринимательская идея заключается в изготовлении шумоизоляционных
Резюме (цель предпринимательского проекта) Настоящая предпринимательская идея заключается в изготовлении шумоизоляционных  ОСОБЕННОСТИ ДЕЛОВОЙ КОРРУПЦИИ
ОСОБЕННОСТИ ДЕЛОВОЙ КОРРУПЦИИ Положение о наставничестве АО «ОДК-СТАР»
Положение о наставничестве АО «ОДК-СТАР» PHONETICS and other sciences
PHONETICS and other sciences  Многоуровневая система планирования в банке. Стратегическое планирование Курс «Банковский менеджмент» к.э.н., доц. Соколов
Многоуровневая система планирования в банке. Стратегическое планирование Курс «Банковский менеджмент» к.э.н., доц. Соколов Михаил Васильевич Ломоносов (1711-1765гг.)
Михаил Васильевич Ломоносов (1711-1765гг.)  Задумался как-то раз Билл Гейтс об увеличении посещаемости своего сайта нужной целевой аудиторией Задумался как-то раз Билл Г
Задумался как-то раз Билл Гейтс об увеличении посещаемости своего сайта нужной целевой аудиторией Задумался как-то раз Билл Г Основы программирования. Представление графов
Основы программирования. Представление графов Сайт купонов на скидки
Сайт купонов на скидки Стандарты сервировки
Стандарты сервировки Технология построения диаграмм UML Диаграммы вариантов использования (Use Case)
Технология построения диаграмм UML Диаграммы вариантов использования (Use Case) Внедрение и поддержка компьютерных систем
Внедрение и поддержка компьютерных систем Линии учебников, УМК по православной культуре (ОПК) издательства «Русское слово» для 4 – 6 классов
Линии учебников, УМК по православной культуре (ОПК) издательства «Русское слово» для 4 – 6 классов Общие правила выполнения чертежей
Общие правила выполнения чертежей Искусство и духовная жизнь 10 класс. Обществознание.
Искусство и духовная жизнь 10 класс. Обществознание. Таможенная экспертиза меда
Таможенная экспертиза меда Знакомство с Windows Communication Foundation
Знакомство с Windows Communication Foundation Свойства древесины
Свойства древесины Шпоночные и шлицевые соединения
Шпоночные и шлицевые соединения Демократия, её основные признаки и ценности
Демократия, её основные признаки и ценности Критерии оценивания перевода
Критерии оценивания перевода Опыт эксплуатации ВЛ в мерзлых грунтах и пути решения по предотвращению технологических нарушений, связанных с пучением грунтов
Опыт эксплуатации ВЛ в мерзлых грунтах и пути решения по предотвращению технологических нарушений, связанных с пучением грунтов Художественная литература и история 1 урок литературы в 8 классе (по программе Г.С.Меркина) Подг
Художественная литература и история 1 урок литературы в 8 классе (по программе Г.С.Меркина) Подг Организационно-правовая документация
Организационно-правовая документация Информационная безопасность
Информационная безопасность  Проект. Определитель заряда батареи ОЗБ 0.1
Проект. Определитель заряда батареи ОЗБ 0.1 К. О Шактаржык - создатель географической карты Тувинской АССР, автор учебника «География Тувы»
К. О Шактаржык - создатель географической карты Тувинской АССР, автор учебника «География Тувы» Автомат продаж Тема 6 Организация продающего пространства. Послепродажное обслуживание.
Автомат продаж Тема 6 Организация продающего пространства. Послепродажное обслуживание.