- Робот вычислитель

Содержание
- 2. ВВЕДЕНИЕ Робототехника – увлекательное занятие в любом возрасте. Конструирование самодельного робота не только увлекательное занятие, но
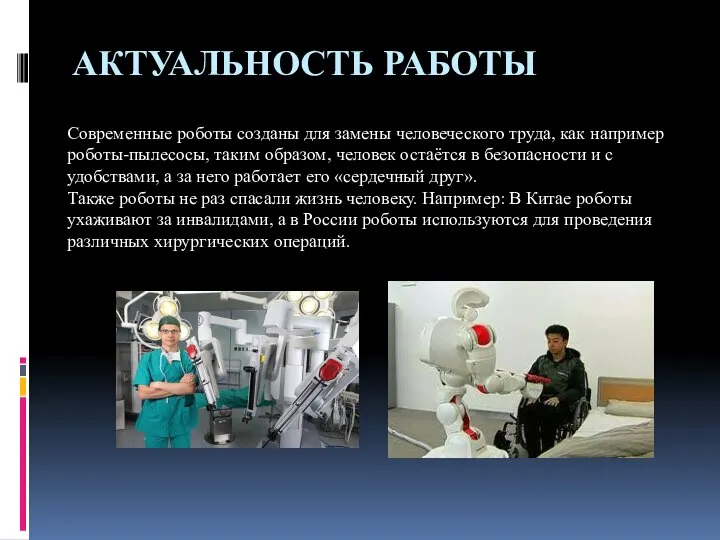
- 3. АКТУАЛЬНОСТЬ РАБОТЫ Современные роботы созданы для замены человеческого труда, как например роботы-пылесосы, таким образом, человек остаётся
- 4. ЦЕЛЬ РАБОТЫ 1)Создать работа который будет вычислять объём и площадь прямоугольных объектов. 2)Написать программу для нашего
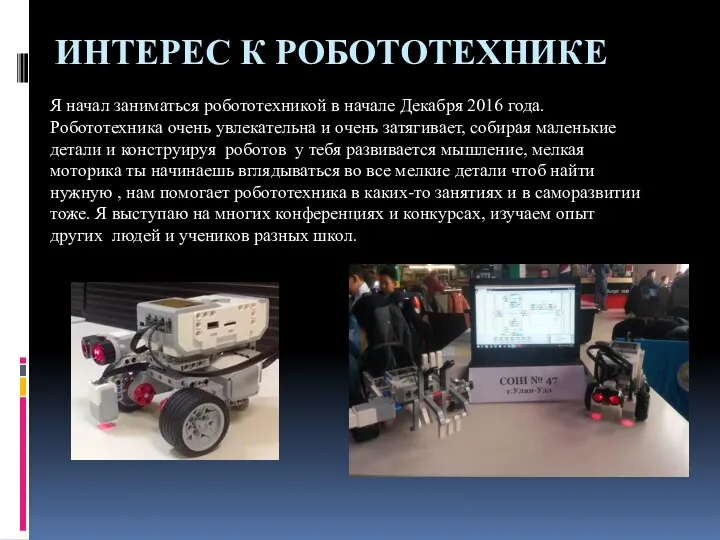
- 5. ИНТЕРЕС К РОБОТОТЕХНИКЕ Я начал заниматься робототехникой в начале Декабря 2016 года. Робототехника очень увлекательна и
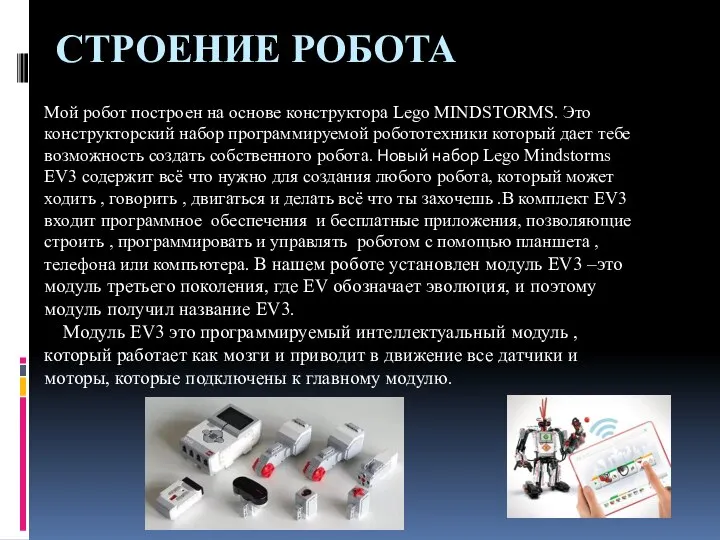
- 6. СТРОЕНИЕ РОБОТА Мой робот построен на основе конструктора Lego MINDSTORMS. Это конструкторский набор программируемой робототехники который
- 7. ГЛАВНЫЕ ДАТЧИКИ В моём роботе используются два основных датчика. Это датчик касания и ультразвуковой датчик.
- 8. ДАТЧИК КАСАНИЯ Датчик касания представляет собой специальную кнопку, которая может находиться в двух состояниях -Нажатия или
- 9. УЛЬТРАЗВУКОВОЙ ДАТЧИК Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или в дюймах. Кроме режимов измерения
- 10. ВЫЧИСЛИТЕЛЬНЫЕ СПОСОБНОСТИ РОБОТА. ИЗМЕРЕНИЕ ПЛОЩАДИ Что бы вычислить площадь комнаты, мне потребовались следующие формулы: Длина окружности-
- 11. ИЗМЕРЕНИЕ ОБЪЁМА. Для измерения объёма, мне нужны были те же самые формулы, что и измерение площади.
- 12. ДОПОЛНЕНИЯ Наш робот, желательно, должен вычислять длинные дистанции, ведь существует не большая погрешность в несколько сантиметров
- 13. ТРИ ЗАКОНА РОБОТА Существует три закона для робота! Законы для них придумал великий писатель Айзек Азимов.
- 15. Скачать презентацию

ВВЕДЕНИЕ
Робототехника – увлекательное занятие в любом возрасте. Конструирование
самодельного робота не только
ВВЕДЕНИЕ
Робототехника – увлекательное занятие в любом возрасте. Конструирование
самодельного робота не только
АКТУАЛЬНОСТЬ РАБОТЫ
Современные роботы созданы для замены человеческого труда, как например роботы-пылесосы,
АКТУАЛЬНОСТЬ РАБОТЫ
Современные роботы созданы для замены человеческого труда, как например роботы-пылесосы,
ЦЕЛЬ РАБОТЫ
1)Создать работа который будет вычислять объём и площадь прямоугольных объектов.
2)Написать
ЦЕЛЬ РАБОТЫ
1)Создать работа который будет вычислять объём и площадь прямоугольных объектов. 2)Написать
ИНТЕРЕС К РОБОТОТЕХНИКЕ
Я начал заниматься робототехникой в начале Декабря 2016 года.
ИНТЕРЕС К РОБОТОТЕХНИКЕ
Я начал заниматься робототехникой в начале Декабря 2016 года.
СТРОЕНИЕ РОБОТА
Мой робот построен на основе конструктора Lego MINDSTORMS. Это конструкторский
СТРОЕНИЕ РОБОТА
Мой робот построен на основе конструктора Lego MINDSTORMS. Это конструкторский

ГЛАВНЫЕ ДАТЧИКИ
В моём роботе используются два основных датчика. Это датчик касания
ГЛАВНЫЕ ДАТЧИКИ
В моём роботе используются два основных датчика. Это датчик касания

ДАТЧИК КАСАНИЯ
Датчик касания представляет собой специальную кнопку, которая может находиться в
ДАТЧИК КАСАНИЯ
Датчик касания представляет собой специальную кнопку, которая может находиться в

УЛЬТРАЗВУКОВОЙ ДАТЧИК
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или
УЛЬТРАЗВУКОВОЙ ДАТЧИК
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или
ВЫЧИСЛИТЕЛЬНЫЕ СПОСОБНОСТИ РОБОТА.
ИЗМЕРЕНИЕ ПЛОЩАДИ
Что бы вычислить площадь комнаты, мне потребовались следующие
ВЫЧИСЛИТЕЛЬНЫЕ СПОСОБНОСТИ РОБОТА.
ИЗМЕРЕНИЕ ПЛОЩАДИ
Что бы вычислить площадь комнаты, мне потребовались следующие
ИЗМЕРЕНИЕ ОБЪЁМА.
Для измерения объёма, мне нужны были те же самые формулы,
ИЗМЕРЕНИЕ ОБЪЁМА.
Для измерения объёма, мне нужны были те же самые формулы,

ДОПОЛНЕНИЯ
Наш робот, желательно, должен вычислять длинные дистанции, ведь существует не большая
ДОПОЛНЕНИЯ
Наш робот, желательно, должен вычислять длинные дистанции, ведь существует не большая
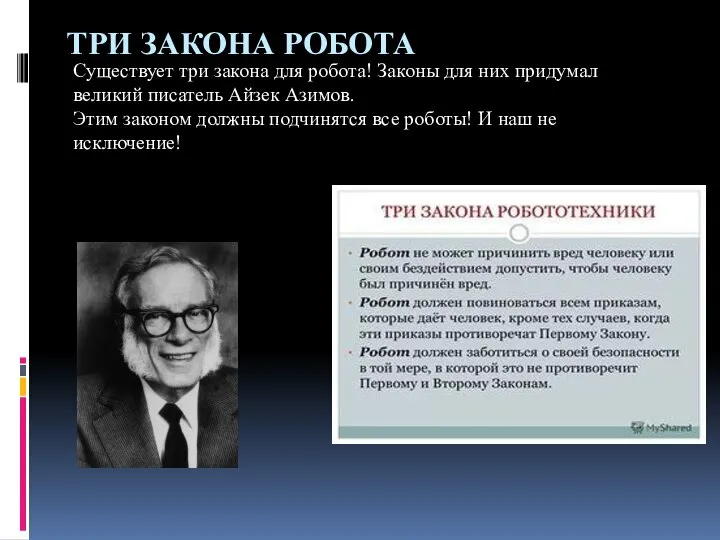
ТРИ ЗАКОНА РОБОТА
Существует три закона для робота! Законы для них придумал
ТРИ ЗАКОНА РОБОТА
Существует три закона для робота! Законы для них придумал
 Презентация Федерация, понятие, признаки и виды
Презентация Федерация, понятие, признаки и виды  Вимоги до оцінювання навчальних досягнень учнів з української мови
Вимоги до оцінювання навчальних досягнень учнів з української мови Тайм-менеджмент
Тайм-менеджмент Идентификация и аутентификация
Идентификация и аутентификация Пробне ЗНО 2015
Пробне ЗНО 2015 Презентация "Бизнес-план инновационного проекта" - скачать презентации по Экономике
Презентация "Бизнес-план инновационного проекта" - скачать презентации по Экономике Беседы об искусстве. Конспект открытого учебного занятия
Беседы об искусстве. Конспект открытого учебного занятия Эффективное управление информацией
Эффективное управление информацией Презентация на тему "Образование и самообразование" - скачать презентации по Педагогике
Презентация на тему "Образование и самообразование" - скачать презентации по Педагогике Тест по культурологии
Тест по культурологии Презентация ПРИНЦИПЫ, ОСОБЕННОСТИ И ФУНКЦИИ ОРГАНИЗАЦИИ ИСПОЛНИТЕЛЬНОЙ ВЛАСТИ
Презентация ПРИНЦИПЫ, ОСОБЕННОСТИ И ФУНКЦИИ ОРГАНИЗАЦИИ ИСПОЛНИТЕЛЬНОЙ ВЛАСТИ  ЦИКЛИЧЕСКИЕ НУКЛЕОТИДЫ В РОЛИ ВТОРИЧНЫХ ПОСРЕДНИКОВ
ЦИКЛИЧЕСКИЕ НУКЛЕОТИДЫ В РОЛИ ВТОРИЧНЫХ ПОСРЕДНИКОВ Административно-юрисдикционная деятельность на примере Мурманской таможни Подготовили: студентки V курса группы ДС 02.2 Зайцева
Административно-юрисдикционная деятельность на примере Мурманской таможни Подготовили: студентки V курса группы ДС 02.2 Зайцева Пушка Гаусса в открытом космосе
Пушка Гаусса в открытом космосе Водный кодекс Российской Федерации Выполнила: студентка II курса группы Ю 123-б Простакова Вероника
Водный кодекс Российской Федерации Выполнила: студентка II курса группы Ю 123-б Простакова Вероника рисуем натюрморт - презентация для начальной школы
рисуем натюрморт - презентация для начальной школы Виды памяти ПК
Виды памяти ПК Управление виртуальной памятью в Win32. Общие принципы.
Управление виртуальной памятью в Win32. Общие принципы. Создание алмазной вышивки
Создание алмазной вышивки Конструкция головы человека (ИЗО)
Конструкция головы человека (ИЗО) АВТОНОМНАЯ (ВЕГЕТАТИВНАЯ) нервная система
АВТОНОМНАЯ (ВЕГЕТАТИВНАЯ) нервная система Таджикистан: Неформальные родительские выплаты в образовании. Тбилиси 21-23 марта 2007 г
Таджикистан: Неформальные родительские выплаты в образовании. Тбилиси 21-23 марта 2007 г Организация ведения оборонительного боя мотострелковым подразделением
Организация ведения оборонительного боя мотострелковым подразделением  Способы преобразования чертежа
Способы преобразования чертежа «Искусство балета» Презентация урока. Подготовлен учителем музыки МОУ Тверского лицея Шаталовой Н.М. г.Тверь
«Искусство балета» Презентация урока. Подготовлен учителем музыки МОУ Тверского лицея Шаталовой Н.М. г.Тверь Vorbereiten für Kontrollarbeit
Vorbereiten für Kontrollarbeit Презентация Факторы производства
Презентация Факторы производства Предмет и объекты экологии История взаимоотношений человека и природы
Предмет и объекты экологии История взаимоотношений человека и природы