- Робототехнические системы легкого класса

Содержание
- 2. История создания РТС Первый опыт создания в нашей стране мобильных роботизированных противопожарных комплексов относится к 1987
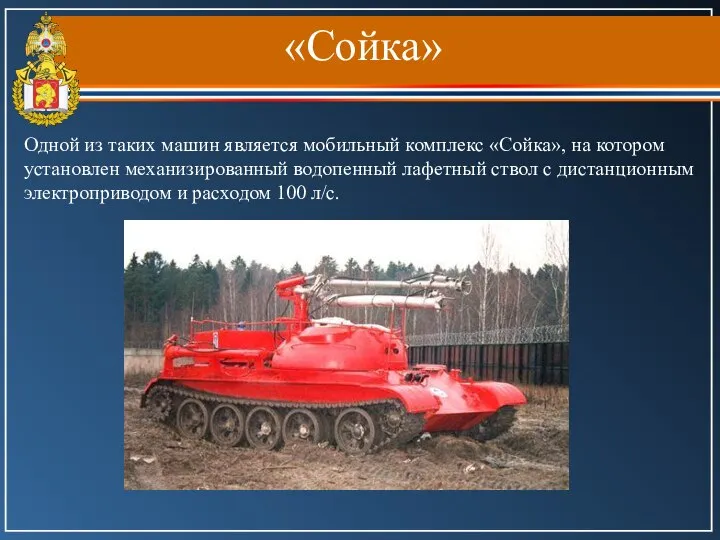
- 3. «Сойка» Одной из таких машин является мобильный комплекс «Сойка», на котором установлен механизированный водопенный лафетный ствол
- 4. История создания РТС С целью развития и внедрения робототехнических технологий в МЧС России была разработана и
- 5. История создания РТС В соответствии с решением многофункциональных задач при проведении пожарно-спасательных операций была разработана система
- 6. Способы передачи сигналов телеуправления: радиоканал (Р); проводная (П); оптический канал (О); комбинированная (К).
- 7. Транспортные базы: гусеничные (Г); колесные (К); комбинированные (Км); шагающие (Ш).
- 8. Типы привода: механическим по схеме двигатель внутреннего сгорания (ДВС) – механическая трансмиссия (М); гидромеханическим по схеме
- 9. По степени функциональности МРТК-П классифицируются: многофункциональные (универсальные); монофункциональные (специализированные), которые должны решать одну или несколько задач.
- 10. Классификация робототехнических средств
- 11. Робототехнический комплекс легкого класса для ведения радиационной разведки и проведения технологических операций в условиях радиационного воздействия
- 12. РТК-08 Назначение: Ликвидация последствий чрезвычайных ситуаций техногенного характера; Производство работ в зонах с повышенным уровнем радиации;
- 13. Робототехническое средство радиационной разведки (РТС-РР)
- 14. Робототехническое средство проведения технологических операций (РТС-ТО)
- 15. Средство доставки и управления на базе автомобиля Mercedes–Benz VARIO 815D
- 16. Тактико-технические характеристики РТС-08
- 17. Робототехнический комплекс «МРК-РП»
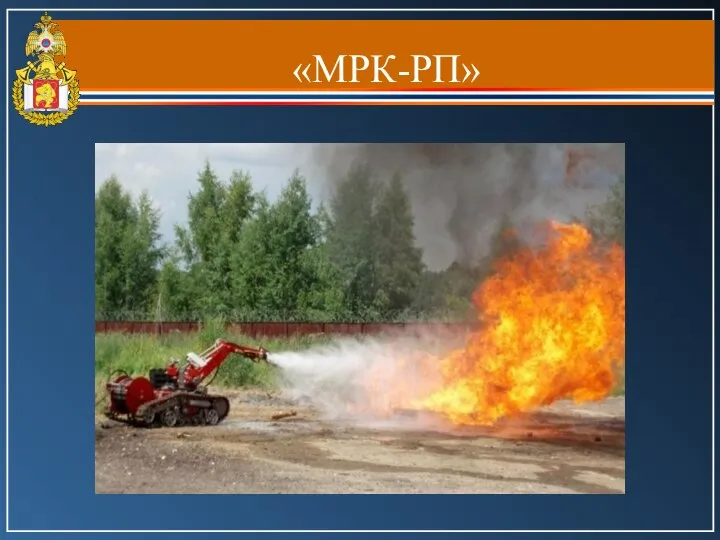
- 18. «МРК-РП» Назначение: предназначен для проведения визуальной и приборной разведки при спасательных и аварийно-восстановительных работах, выполнения работ
- 19. «МРК-РП»
- 20. «МРК-РП» Состав: комплект аварийно-спасательного инструмента; комплект средств пожаротушения; комплект средств тепловой защиты и охлаждения; тепловизор. Зона
- 22. Скачать презентацию
История создания РТС
Первый опыт создания в нашей стране мобильных роботизированных противопожарных
История создания РТС
Первый опыт создания в нашей стране мобильных роботизированных противопожарных
«Сойка»
Одной из таких машин является мобильный комплекс «Сойка», на котором установлен
«Сойка»
Одной из таких машин является мобильный комплекс «Сойка», на котором установлен
История создания РТС
С целью развития и внедрения робототехнических технологий в МЧС
История создания РТС
С целью развития и внедрения робототехнических технологий в МЧС
История создания РТС
В соответствии с решением многофункциональных задач при проведении пожарно-спасательных
История создания РТС
В соответствии с решением многофункциональных задач при проведении пожарно-спасательных
Способы передачи сигналов телеуправления:
радиоканал (Р);
проводная (П);
оптический канал (О);
комбинированная (К).
Способы передачи сигналов телеуправления:
радиоканал (Р);
проводная (П);
оптический канал (О);
комбинированная (К).
Транспортные базы:
гусеничные (Г);
колесные (К);
комбинированные (Км);
шагающие (Ш).
Транспортные базы:
гусеничные (Г);
колесные (К);
комбинированные (Км);
шагающие (Ш).
Типы привода:
механическим по схеме двигатель внутреннего сгорания (ДВС) – механическая трансмиссия
Типы привода:
механическим по схеме двигатель внутреннего сгорания (ДВС) – механическая трансмиссия
По степени функциональности МРТК-П классифицируются:
многофункциональные (универсальные);
монофункциональные (специализированные), которые должны решать одну
По степени функциональности МРТК-П классифицируются:
многофункциональные (универсальные);
монофункциональные (специализированные), которые должны решать одну
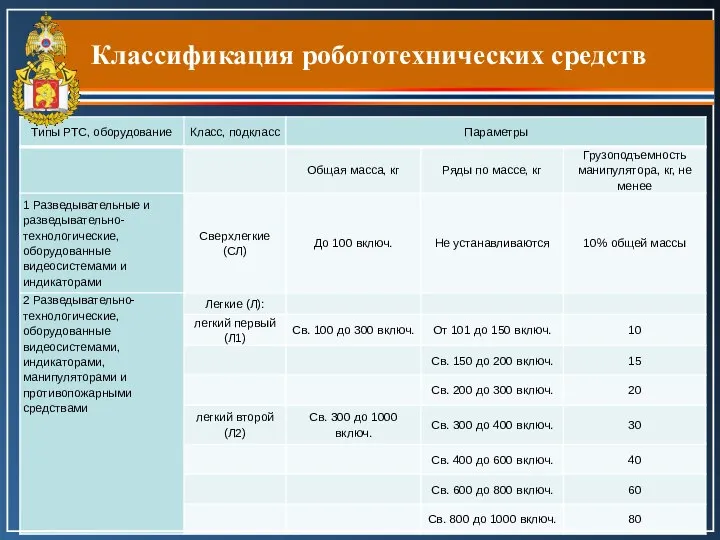
Классификация робототехнических средств
Классификация робототехнических средств

Робототехнический комплекс легкого класса для ведения радиационной разведки и проведения технологических
Робототехнический комплекс легкого класса для ведения радиационной разведки и проведения технологических
РТК-08
Назначение:
Ликвидация последствий чрезвычайных ситуаций техногенного характера;
Производство работ в зонах с повышенным
РТК-08
Назначение:
Ликвидация последствий чрезвычайных ситуаций техногенного характера;
Производство работ в зонах с повышенным

Робототехническое средство радиационной разведки (РТС-РР)
Робототехническое средство радиационной разведки (РТС-РР)

Робототехническое средство проведения технологических операций (РТС-ТО)
Робототехническое средство проведения технологических операций (РТС-ТО)
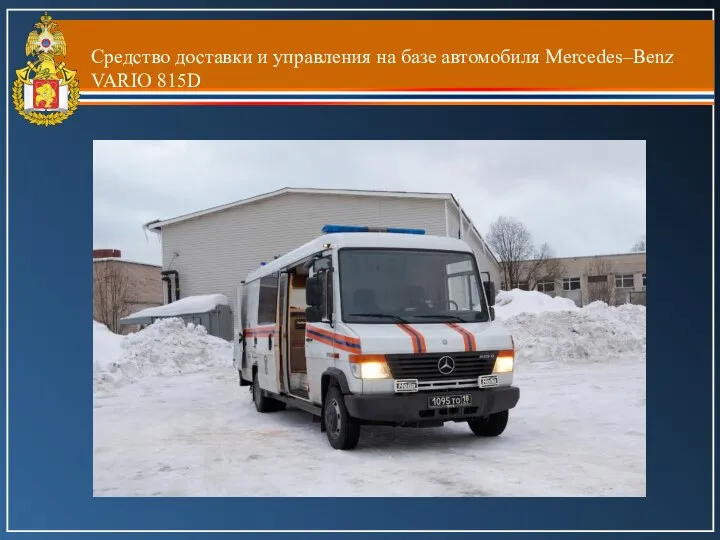
Средство доставки и управления на базе автомобиля Mercedes–Benz VARIO 815D
Средство доставки и управления на базе автомобиля Mercedes–Benz VARIO 815D
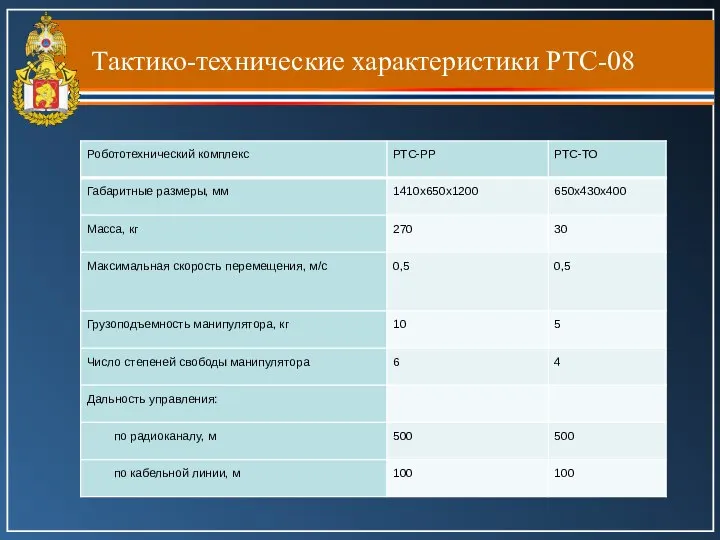
Тактико-технические характеристики РТС-08
Тактико-технические характеристики РТС-08

Робототехнический комплекс «МРК-РП»
Робототехнический комплекс «МРК-РП»
«МРК-РП»
Назначение:
предназначен для проведения визуальной и приборной разведки при спасательных и аварийно-восстановительных
«МРК-РП»
Назначение:
предназначен для проведения визуальной и приборной разведки при спасательных и аварийно-восстановительных
«МРК-РП»
«МРК-РП»
«МРК-РП»
Состав:
комплект аварийно-спасательного инструмента;
комплект средств пожаротушения;
комплект средств тепловой защиты и охлаждения;
тепловизор.
Зона действия
«МРК-РП»
Состав:
комплект аварийно-спасательного инструмента;
комплект средств пожаротушения;
комплект средств тепловой защиты и охлаждения;
тепловизор.
Зона действия
 Религия в современном мире. Урок 20
Религия в современном мире. Урок 20 Религиозные ритуалы. Обычаи и обряды
Религиозные ритуалы. Обычаи и обряды Художественная культура Византии
Художественная культура Византии Первое знакомство с правилами игры в шахматы
Первое знакомство с правилами игры в шахматы Баскетбол – техника игры. Краткая история баскетбола
Баскетбол – техника игры. Краткая история баскетбола Култьурные ценности. Правовая основа
Култьурные ценности. Правовая основа Expansion
Expansion  Глобальные и региональные экологические проблемы
Глобальные и региональные экологические проблемы  Национальная казахская одежда
Национальная казахская одежда Програмування мікроконтролерів. Робота зі scatter-файлом і мапування пам'яті. Лекція 8
Програмування мікроконтролерів. Робота зі scatter-файлом і мапування пам'яті. Лекція 8 Россия в мировом сообществе
Россия в мировом сообществе Спортивно-оздоровительный центр
Спортивно-оздоровительный центр Как сэкономить 2 миллиарда кубометров газа в год
Как сэкономить 2 миллиарда кубометров газа в год Углы
Углы Патофизиология сердечной недостаточности
Патофизиология сердечной недостаточности  Исповедь
Исповедь Блиц-опрос Менеджмент
Блиц-опрос Менеджмент Факториал
Факториал  Федеральный государственный образовательный стандарт начального общего образования: особенности, структура, содержание, нормати
Федеральный государственный образовательный стандарт начального общего образования: особенности, структура, содержание, нормати Повторяем даты. Правители Руси и России
Повторяем даты. Правители Руси и России  ПРАВО ХОЗЯЙСТВЕННОГО ВЕДЕНИЯ И ОПЕРАТИВНОГО УПРАВЛЕНИЯ ИМУЩЕСТВОМ
ПРАВО ХОЗЯЙСТВЕННОГО ВЕДЕНИЯ И ОПЕРАТИВНОГО УПРАВЛЕНИЯ ИМУЩЕСТВОМ  Отличительные черты выборов в демократическом обществе
Отличительные черты выборов в демократическом обществе Презентация Социальная мобильность
Презентация Социальная мобильность Второе начало термодинамики и понятие энтропии
Второе начало термодинамики и понятие энтропии  Методика ДНВ
Методика ДНВ Проблемы классификации правовых систем
Проблемы классификации правовых систем "Фоамирановый рай" – мой первый стартап
"Фоамирановый рай" – мой первый стартап Роды 1 часть
Роды 1 часть