- Рулевое управление

Содержание
- 2. Рулевое управление предназначено для обеспечения движения автомобиля в заданном водителем направлении и наряду с тормозной системой
- 3. рулевое колесо с рулевой колонкой; рулевой механизм; рулевой привод. Рулевое управление современного автомобиля имеет следующее устройство:
- 4. Схема рулевого управления
- 5. Рулевое колесо воспринимает от водителя усилия, необходимые для изменения направления движения, и передает их через рулевую
- 6. Рулевая колонка обеспечивает соединение рулевого колеса с рулевым механизмом. Рулевая колонка представлена рулевым валом, имеющим несколько
- 7. Рулевой механизм предназначен для увеличения, приложенного к рулевому колесу усилия, и передачи его рулевому приводу. В
- 8. Реечный рулевой механизм включает шестерню, установленную на валу рулевого колеса и связанную с зубчатой рейкой. При
- 9. Ряд автопроизводителей (BMW, Honda, Mazda, Mitsubishi, Nissan, Renault, Toyota,) предлагают на некоторых легковых автомобилях рулевые механизмы
- 10. Необходимо отметить, что эффект «подруливания» задних колес при движении автомобиля на высокой скорости достигается и пассивными
- 11. Рулевой привод предназначен для передачи усилия, необходимого для поворота, от рулевого механизма к колесам. Он обеспечивает
- 12. Наибольшее распространение получил механический рулевой привод, состоящий из рулевых тяг и рулевых шарниров. Рулевой шарнир выполняется
- 13. Рулевое управление характеризуется множеством кинематических параметров, основными из которых являются четыре угла (схождения, развала, поперечного и
- 14. Для уменьшения усилий, необходимых для поворота рулевого колеса, в рулевом приводе применяется усилитель рулевого управления. Применение
- 15. Большинство современных автомобилей имеют гидравлический усилитель рулевого управления (другое название – гидроусилитель руля). Разновидностью гидроусилителя является
- 16. Усилитель рулевого управления, в котором поворотное усилие изменяется в зависимости от скорости автомобиля, называется адаптивным усилителем
- 17. Инновационными являются система активного рулевого управленияот BMW, система динамического рулевого управления от Audi, в которых передаточное
- 18. Перспективной является конструкция рулевого управления, в которой отсутствует механическая связь рулевого колеса и ведущих колес, т.н.
- 19. Система активного рулевого управления (Active Front Steering, AFS) предназначена для: изменения передаточного отношения рулевого механизма в
- 20. Система AFS является совместной разработкой фирм Bosch и ZF. В настоящее время система устанавливается на большинство
- 21. Система активного рулевого управления в своей работевзаимодействует с другими системами, в т.ч. с гидроусилителем руля Servotronic,
- 22. планетарный редуктор; система управления. Система AFS имеет следующее общее устройство:
- 23. Схема системы активного рулевого управления
- 24. Планетарный редуктор служит для изменения скорости вращения рулевого вала. Он устанавливается на рулевом валу. Планетарный редуктор
- 25. Эпициклическая шестерня имеет возможность вращения. При неподвижной шестерне передаточное число планетарного редуктора равно единице и рулевой
- 26. Для реализации функций системы активного рулевого управления создана система управления. Электронная система управления включает следующие элементы:
- 27. Входные датчики предназначены для измерения параметров работы системы и преобразования их в электрические сигналы. Система AFS
- 28. Датчик суммарного угла поворота рулевого механизма может не устанавливаться, в этом случае угол рассчитывается виртуально на
- 29. Электронный блок управления принимает сигналы от датчиков, обрабатывает их и в соответствии с заложенным алгоритмом формирует
- 30. Исполнительными механизмами системы AFS являются: электродвигатель; сигнальная лампа на панели приборов.
- 31. Электродвигатель обеспечивает вращение эпициклической шестерни планетарного редуктора. Электродвигатель оборудованаварийным электромагнитным фиксатором, блокирующим червячную передачу. В исходном
- 32. Возникновение неисправностей в системе сопровождается срабатыванием сигнальной лампы на панели приборов. При этом на информационном дисплее
- 33. Система AFS активируется при запуске двигателя. Работа системы заключается в изменении передаточного отношения рулевого механизма в
- 34. При совершении маневров на низкой скорости в соответствии с сигналом датчика угла поворота рулевого колеса включается
- 35. С ростом скорости движения выполнение поворотов сопровождается уменьшением частоты вращения электродвигателя, соответственно увеличивается передаточное отношение рулевого
- 36. С дальнейшим ростом скорости электродвигатель снова включается, при этом вращение производится в противоположную сторону. Передаточное отношение
- 37. Если при прохождении поворота фиксируется избыточная поворачиваемость автомобиля (потеря сцепления задних колес с дорогой) система AFS
- 38. Аналогичным образом система активного рулевого управления стабилизирует движение автомобиля при торможении на скользком покрытии, чем достигается
- 39. Рулевой механизм является основой рулевого управления, где он выполняет следующие функции: увеличение усилия, приложенного к рулевому
- 40. В зависимости от типа механической передачи различают следующие типы рулевых механизмов: реечный; червячный; винтовой.
- 41. Реечный рулевой механизм является самым распространенным типом механизма, устанавливаемым на легковые автомобили. Реечный рулевой механизм имеет
- 42. Схема реечного рулевого механизма
- 43. Работа реечного рулевого механизма осуществляется следующим образом. При вращении рулевого колеса рейка перемещается вправо или влево.
- 44. Червячный рулевой механизм состоит из глобоидного червяка (червяка с переменным диаметром), соединенного с рулевым валом, и
- 45. Винтовой рулевой механизм объединяет следующие конструктивные элементы: винт на валу рулевого колеса; гайку, перемещаемую по винту;
- 46. Схема винтового рулевого механизма
- 47. Особенностью винтового рулевого механизма является соединение винта и гайки с помощью шариков, чем достигается меньшее трение
- 48. Гидроусилителем рулевого управления (обиходное название –гидроусилитель руля) называется конструктивный элемент рулевого управления автомобиля, в котором дополнительное
- 49. Простейший гидроусилитель руля имеет привод гидронасоса отколенчатого вала двигателя. У такого усилителя производительность прямо пропорциональна частоте
- 50. Наиболее совершенным с точки зрения потребительских свойств и конструкции являетсяэлектрогидравлический усилитель руля. Преимуществами электрогидравлического усилителя являются
- 51. Электрогидравлический усилитель рулевого управления имеет следующее устройство: насосный агрегат; гидравлический узел управления; система управления.
- 52. Насосный агрегат представляет собой объединенный блок, включающий гидравлический насос, электродвигатель насоса и бачок для рабочей жидкости.
- 53. Система управления обеспечивает работу гидроусилителя. На современных автомобилях используется электронная система управления, которая обеспечивает регулирование коэффициента
- 54. На автомобилях концерна Volkswagen и BMW электронная система управления гидравлическим усилителем руля имеет торговое название Servotronic.
- 55. В разных модификациях системы Servotronic используются следующие исполнительные устройства: электродвигатель насоса; электромагнитный клапан в гидросистеме. В
- 56. Работа гидроусилителя руля При прямолинейном движении автомобиля гидравлический узел управления обеспечивает циркуляцию жидкости по кругу (от
- 57. При осуществлении поворота на небольшой скорости (при парковке, маневрах в ограниченном пространстве) гидроусилитель руля работает с
- 58. С увеличением скорости движения частота вращения электродвигателя насоса снижается (срабатывает электромагнитный клапан и уменьшает поперечное сечение
- 59. Электроусилителем рулевого управления (обиходное название –элетроусилитель руля) называется конструктивный элементрулевого управления автомобиля, в котором дополнительное усилие
- 60. Основными преимуществами электроусилителя руля в сравнении с гидроусилителем рулевого управления являются: удобство регулирования характеристик рулевого управления;
- 61. Электроусилитель рулевого управления открыл широкие возможности для создания различных систем активной безопасности: система курсовой устойчивости; система
- 62. Различают две основных схемы компоновки электроусилителя рулевого управления: усилие электродвигателя передается на вал рулевого колеса; усилие
- 63. Электромеханический усилитель рулевого управления имеет следующее устройство: электродвигатель усилителя; механическая передача; система управления.
- 64. Электроусилитель руля объединен с рулевым механизмом в одном блоке. В конструкции усилителя используется, как правило, асинхронный
- 65. Схема электромеханического усилителя руля c параллельным приводом
- 66. В электроусилителе с параллельным приводом усилие от электродвигателя передается на рейку рулевого механизма с помощью ременной
- 67. Электронный блок управления обрабатывает сигналы датчиков. В соответствии с заложенной программой вырабатывается соответствующее управляющее воздействие на
- 68. Поворот автомобиляосуществляется поворотом рулевого колеса. Крутящий момент от рулевого колеса передается через торсион на рулевой механизм.
- 69. Поворот автомобиля на небольшой скорости обычно производится при парковке. Он характеризуется большими углами поворота рулевого колеса.
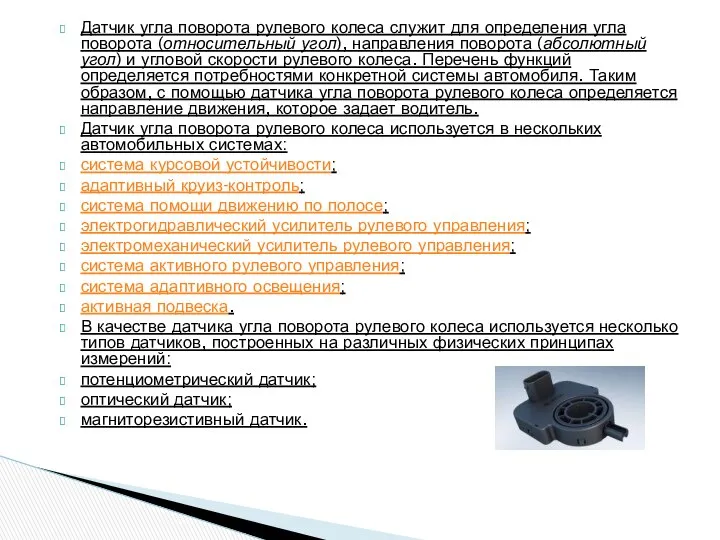
- 70. Датчик угла поворота рулевого колеса является одним из датчиков положения, которые широко используются в электронных системах
- 71. Датчик угла поворота рулевого колеса служит для определения угла поворота (относительный угол), направления поворота (абсолютный угол)
- 72. Потенциометрический датчик угла поворота рулевого колеса относится к контактным датчикам. Он включает два потенциометра, закрепленных на
- 73. Более совершенным сенсорным устройством является бесконтактный оптический датчик угла поворота рулевого колеса. Датчик объединяет кодирующий диск,
- 74. Магниторезистивный датчик угла поворота рулевого колеса является более универсальным устройством, т.к. помимо относительного и абсолютного угла
- 75. В основе датчика лежат гигантские магниторезисторы (GMR) или анизотропные магниторезисторы (AMR). Каждый из магнитов вращаются посредством
- 76. В основу работы электрического усилителя рулевого управленияположена величина крутящего момента на рулевом колесе. Чем больше усилие
- 77. Различают несколько конструкций датчиков крутящего момента на рулевом колесе, построенных на различных физических принципах: оптический, индуктивный,
- 78. Схема датчика крутящего момента
- 79. Датчик крутящего момента встроен в рулевую колонку. На валу рулевой колонки установлен многополюсной магнит, имеющий несколько
- 80. Принцип действия датчика построен на измерении угла закручивания торсиона, который пропорционален крутящему моменту на рулевом колесе.
- 82. Скачать презентацию

Рулевое управление предназначено для обеспечения движения автомобиля в заданном водителем направлении
Рулевое управление предназначено для обеспечения движения автомобиля в заданном водителем направлении
рулевое колесо с рулевой колонкой;
рулевой механизм;
рулевой привод.
Рулевое управление современного автомобиля имеет
рулевое колесо с рулевой колонкой;
рулевой механизм;
рулевой привод.
Рулевое управление современного автомобиля имеет

Схема рулевого управления
Схема рулевого управления

Рулевое колесо воспринимает от водителя усилия, необходимые для изменения направления движения, и
Рулевое колесо воспринимает от водителя усилия, необходимые для изменения направления движения, и

Рулевая колонка обеспечивает соединение рулевого колеса с рулевым механизмом. Рулевая колонка представлена
Рулевая колонка обеспечивает соединение рулевого колеса с рулевым механизмом. Рулевая колонка представлена
Рулевой механизм предназначен для увеличения, приложенного к рулевому колесу усилия, и передачи
Рулевой механизм предназначен для увеличения, приложенного к рулевому колесу усилия, и передачи
Реечный рулевой механизм включает шестерню, установленную на валу рулевого колеса и
Реечный рулевой механизм включает шестерню, установленную на валу рулевого колеса и
Ряд автопроизводителей (BMW, Honda, Mazda, Mitsubishi, Nissan, Renault, Toyota,) предлагают на
Ряд автопроизводителей (BMW, Honda, Mazda, Mitsubishi, Nissan, Renault, Toyota,) предлагают на
Необходимо отметить, что эффект «подруливания» задних колес при движении автомобиля на
Необходимо отметить, что эффект «подруливания» задних колес при движении автомобиля на
Рулевой привод предназначен для передачи усилия, необходимого для поворота, от рулевого механизма
Рулевой привод предназначен для передачи усилия, необходимого для поворота, от рулевого механизма
Наибольшее распространение получил механический рулевой привод, состоящий из рулевых тяг и
Наибольшее распространение получил механический рулевой привод, состоящий из рулевых тяг и

Рулевое управление характеризуется множеством кинематических параметров, основными из которых являются четыре
Рулевое управление характеризуется множеством кинематических параметров, основными из которых являются четыре
Для уменьшения усилий, необходимых для поворота рулевого колеса, в рулевом приводе
Для уменьшения усилий, необходимых для поворота рулевого колеса, в рулевом приводе
Большинство современных автомобилей имеют гидравлический усилитель рулевого управления (другое название – гидроусилитель руля). Разновидностью
Большинство современных автомобилей имеют гидравлический усилитель рулевого управления (другое название – гидроусилитель руля). Разновидностью

Усилитель рулевого управления, в котором поворотное усилие изменяется в зависимости от
Усилитель рулевого управления, в котором поворотное усилие изменяется в зависимости от
Инновационными являются система активного рулевого управленияот BMW, система динамического рулевого управления от
Инновационными являются система активного рулевого управленияот BMW, система динамического рулевого управления от
Перспективной является конструкция рулевого управления, в которой отсутствует механическая связь рулевого
Перспективной является конструкция рулевого управления, в которой отсутствует механическая связь рулевого
Система активного рулевого управления (Active Front Steering, AFS) предназначена для:
изменения передаточного отношения
Система активного рулевого управления (Active Front Steering, AFS) предназначена для:
изменения передаточного отношения

Система AFS является совместной разработкой фирм Bosch и ZF. В настоящее время система устанавливается на
Система AFS является совместной разработкой фирм Bosch и ZF. В настоящее время система устанавливается на

Система активного рулевого управления в своей работевзаимодействует с другими системами, в т.ч.
Система активного рулевого управления в своей работевзаимодействует с другими системами, в т.ч.

планетарный редуктор;
система управления.
Система AFS имеет следующее общее устройство:
планетарный редуктор;
система управления.
Система AFS имеет следующее общее устройство:

Схема системы активного рулевого управления
Схема системы активного рулевого управления
Планетарный редуктор служит для изменения скорости вращения рулевого вала. Он устанавливается на
Планетарный редуктор служит для изменения скорости вращения рулевого вала. Он устанавливается на
Эпициклическая шестерня имеет возможность вращения. При неподвижной шестерне передаточное число планетарного редуктора
Эпициклическая шестерня имеет возможность вращения. При неподвижной шестерне передаточное число планетарного редуктора
Для реализации функций системы активного рулевого управления создана система управления. Электронная система
Для реализации функций системы активного рулевого управления создана система управления. Электронная система
Входные датчики предназначены для измерения параметров работы системы и преобразования их в
Входные датчики предназначены для измерения параметров работы системы и преобразования их в
Датчик суммарного угла поворота рулевого механизма может не устанавливаться, в этом случае
Датчик суммарного угла поворота рулевого механизма может не устанавливаться, в этом случае
Электронный блок управления принимает сигналы от датчиков, обрабатывает их и в соответствии
Электронный блок управления принимает сигналы от датчиков, обрабатывает их и в соответствии
Исполнительными механизмами системы AFS являются:
электродвигатель;
сигнальная лампа на панели приборов.
Исполнительными механизмами системы AFS являются:
электродвигатель;
сигнальная лампа на панели приборов.

Электродвигатель обеспечивает вращение эпициклической шестерни планетарного редуктора. Электродвигатель оборудованаварийным электромагнитным фиксатором, блокирующим
Электродвигатель обеспечивает вращение эпициклической шестерни планетарного редуктора. Электродвигатель оборудованаварийным электромагнитным фиксатором, блокирующим

Возникновение неисправностей в системе сопровождается срабатыванием сигнальной лампы на панели приборов. При этом
Возникновение неисправностей в системе сопровождается срабатыванием сигнальной лампы на панели приборов. При этом
Система AFS активируется при запуске двигателя. Работа системы заключается в изменении
Система AFS активируется при запуске двигателя. Работа системы заключается в изменении
При совершении маневров на низкой скорости в соответствии с сигналом датчика
При совершении маневров на низкой скорости в соответствии с сигналом датчика

С ростом скорости движения выполнение поворотов сопровождается уменьшением частоты вращения электродвигателя,
С ростом скорости движения выполнение поворотов сопровождается уменьшением частоты вращения электродвигателя,

С дальнейшим ростом скорости электродвигатель снова включается, при этом вращение производится
С дальнейшим ростом скорости электродвигатель снова включается, при этом вращение производится
Если при прохождении поворота фиксируется избыточная поворачиваемость автомобиля (потеря сцепления задних колес с
Если при прохождении поворота фиксируется избыточная поворачиваемость автомобиля (потеря сцепления задних колес с

Аналогичным образом система активного рулевого управления стабилизирует движение автомобиля при торможении на
Аналогичным образом система активного рулевого управления стабилизирует движение автомобиля при торможении на

Рулевой механизм является основой рулевого управления, где он выполняет следующие функции:
увеличение
Рулевой механизм является основой рулевого управления, где он выполняет следующие функции:
увеличение
В зависимости от типа механической передачи различают следующие типы рулевых механизмов:
реечный;
червячный;
винтовой.
В зависимости от типа механической передачи различают следующие типы рулевых механизмов:
реечный;
червячный;
винтовой.
Реечный рулевой механизм является самым распространенным типом механизма, устанавливаемым на легковые
Реечный рулевой механизм является самым распространенным типом механизма, устанавливаемым на легковые

Схема реечного рулевого механизма
Схема реечного рулевого механизма
Работа реечного рулевого механизма осуществляется следующим образом. При вращении рулевого колеса рейка
Работа реечного рулевого механизма осуществляется следующим образом. При вращении рулевого колеса рейка

Червячный рулевой механизм состоит из глобоидного червяка (червяка с переменным диаметром),
Червячный рулевой механизм состоит из глобоидного червяка (червяка с переменным диаметром),

Винтовой рулевой механизм объединяет следующие конструктивные элементы:
винт на валу рулевого колеса;
гайку,
Винтовой рулевой механизм объединяет следующие конструктивные элементы:
винт на валу рулевого колеса;
гайку,

Схема винтового рулевого механизма
Схема винтового рулевого механизма
Особенностью винтового рулевого механизма является соединение винта и гайки с помощью
Особенностью винтового рулевого механизма является соединение винта и гайки с помощью
Гидроусилителем рулевого управления (обиходное название –гидроусилитель руля) называется конструктивный элемент рулевого управления
Гидроусилителем рулевого управления (обиходное название –гидроусилитель руля) называется конструктивный элемент рулевого управления

Простейший гидроусилитель руля имеет привод гидронасоса отколенчатого вала двигателя. У такого
Простейший гидроусилитель руля имеет привод гидронасоса отколенчатого вала двигателя. У такого

Наиболее совершенным с точки зрения потребительских свойств и конструкции являетсяэлектрогидравлический усилитель
Наиболее совершенным с точки зрения потребительских свойств и конструкции являетсяэлектрогидравлический усилитель
Электрогидравлический усилитель рулевого управления имеет следующее устройство:
насосный агрегат;
гидравлический узел управления;
система управления.
Электрогидравлический усилитель рулевого управления имеет следующее устройство:
насосный агрегат;
гидравлический узел управления;
система управления.
Насосный агрегат представляет собой объединенный блок, включающий гидравлический насос, электродвигатель насоса и
Насосный агрегат представляет собой объединенный блок, включающий гидравлический насос, электродвигатель насоса и
Система управления обеспечивает работу гидроусилителя. На современных автомобилях используется электронная система управления,
Система управления обеспечивает работу гидроусилителя. На современных автомобилях используется электронная система управления,
На автомобилях концерна Volkswagen и BMW электронная система управления гидравлическим усилителем
На автомобилях концерна Volkswagen и BMW электронная система управления гидравлическим усилителем

В разных модификациях системы Servotronic используются следующие исполнительные устройства:
электродвигатель насоса;
электромагнитный клапан в
В разных модификациях системы Servotronic используются следующие исполнительные устройства:
электродвигатель насоса;
электромагнитный клапан в
Работа гидроусилителя руля
При прямолинейном движении автомобиля гидравлический узел управления обеспечивает циркуляцию жидкости
Работа гидроусилителя руля
При прямолинейном движении автомобиля гидравлический узел управления обеспечивает циркуляцию жидкости
При осуществлении поворота на небольшой скорости (при парковке, маневрах в ограниченном пространстве)
При осуществлении поворота на небольшой скорости (при парковке, маневрах в ограниченном пространстве)
С увеличением скорости движения частота вращения электродвигателя насоса снижается (срабатывает электромагнитный клапан
С увеличением скорости движения частота вращения электродвигателя насоса снижается (срабатывает электромагнитный клапан
Электроусилителем рулевого управления (обиходное название –элетроусилитель руля) называется конструктивный элементрулевого управления
Электроусилителем рулевого управления (обиходное название –элетроусилитель руля) называется конструктивный элементрулевого управления
Основными преимуществами электроусилителя руля в сравнении с гидроусилителем рулевого управления являются:
удобство
Основными преимуществами электроусилителя руля в сравнении с гидроусилителем рулевого управления являются:
удобство
Электроусилитель рулевого управления открыл широкие возможности для создания различных систем активной
Электроусилитель рулевого управления открыл широкие возможности для создания различных систем активной
Различают две основных схемы компоновки электроусилителя рулевого управления:
усилие электродвигателя передается на
Различают две основных схемы компоновки электроусилителя рулевого управления:
усилие электродвигателя передается на

Электромеханический усилитель рулевого управления имеет следующее устройство:
электродвигатель усилителя;
механическая передача;
система управления.
Электромеханический усилитель рулевого управления имеет следующее устройство:
электродвигатель усилителя;
механическая передача;
система управления.

Электроусилитель руля объединен с рулевым механизмом в одном блоке. В конструкции
Электроусилитель руля объединен с рулевым механизмом в одном блоке. В конструкции

Схема электромеханического усилителя руля c параллельным приводом
Схема электромеханического усилителя руля c параллельным приводом
В электроусилителе с параллельным приводом усилие от электродвигателя передается на рейку
В электроусилителе с параллельным приводом усилие от электродвигателя передается на рейку
Электронный блок управления обрабатывает сигналы датчиков. В соответствии с заложенной программой вырабатывается
Электронный блок управления обрабатывает сигналы датчиков. В соответствии с заложенной программой вырабатывается

Поворот автомобиляосуществляется поворотом рулевого колеса. Крутящий момент от рулевого колеса передается
Поворот автомобиляосуществляется поворотом рулевого колеса. Крутящий момент от рулевого колеса передается

Поворот автомобиля на небольшой скорости обычно производится при парковке. Он характеризуется большими
Поворот автомобиля на небольшой скорости обычно производится при парковке. Он характеризуется большими

Датчик угла поворота рулевого колеса является одним из датчиков положения, которые
Датчик угла поворота рулевого колеса является одним из датчиков положения, которые
Датчик угла поворота рулевого колеса служит для определения угла поворота (относительный
Датчик угла поворота рулевого колеса служит для определения угла поворота (относительный
Потенциометрический датчик угла поворота рулевого колеса относится к контактным датчикам. Он
Потенциометрический датчик угла поворота рулевого колеса относится к контактным датчикам. Он
Более совершенным сенсорным устройством является бесконтактный оптический датчик угла поворота рулевого
Более совершенным сенсорным устройством является бесконтактный оптический датчик угла поворота рулевого

Магниторезистивный датчик угла поворота рулевого колеса является более универсальным устройством, т.к.
Магниторезистивный датчик угла поворота рулевого колеса является более универсальным устройством, т.к.
В основе датчика лежат гигантские магниторезисторы (GMR) или анизотропные магниторезисторы (AMR).
В основе датчика лежат гигантские магниторезисторы (GMR) или анизотропные магниторезисторы (AMR).

В основу работы электрического усилителя рулевого управленияположена величина крутящего момента на рулевом
В основу работы электрического усилителя рулевого управленияположена величина крутящего момента на рулевом

Различают несколько конструкций датчиков крутящего момента на рулевом колесе, построенных на
Различают несколько конструкций датчиков крутящего момента на рулевом колесе, построенных на

Схема датчика крутящего момента
Схема датчика крутящего момента

Датчик крутящего момента встроен в рулевую колонку. На валу рулевой колонки
Датчик крутящего момента встроен в рулевую колонку. На валу рулевой колонки
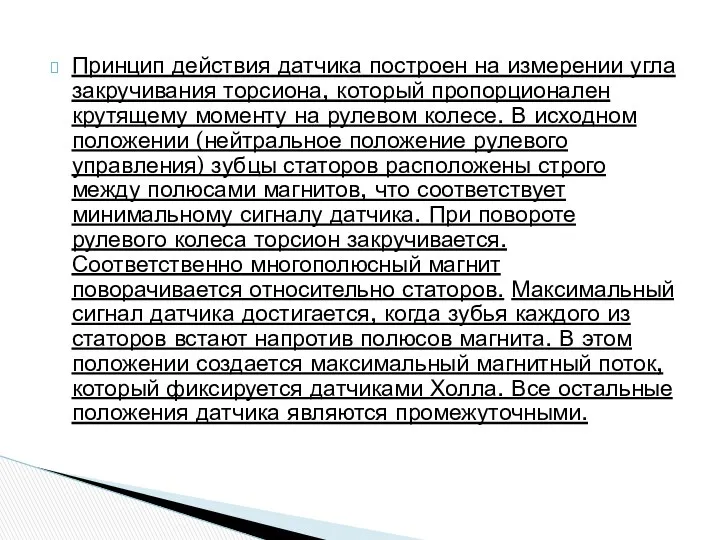
Принцип действия датчика построен на измерении угла закручивания торсиона, который пропорционален
Принцип действия датчика построен на измерении угла закручивания торсиона, который пропорционален
 Петербург театральный, музыкальный и мир кино Вторая половина XIX века
Петербург театральный, музыкальный и мир кино Вторая половина XIX века  Vorbereitung für die Kontrollarbeit
Vorbereitung für die Kontrollarbeit Презентация на тему "Соотношение ключевых компетенций с общеучебными умениями и навыками" - скачать презентации по Педагогик
Презентация на тему "Соотношение ключевых компетенций с общеучебными умениями и навыками" - скачать презентации по Педагогик Особенности обмена АК
Особенности обмена АК  С активной и трансформаторомt
С активной и трансформаторомt  Р.Р. Васнецов Богатыри
Р.Р. Васнецов Богатыри Цикл статей Зигмунда Фрейда «Мойсей і монотеїзм»
Цикл статей Зигмунда Фрейда «Мойсей і монотеїзм» Научный стиль
Научный стиль Заболеваемость населения
Заболеваемость населения Сечения
Сечения Правила оформления чертежей
Правила оформления чертежей Презентация на тему "Модель современного учителя: проблемы, поиски, решения" - скачать презентации по Педагогике
Презентация на тему "Модель современного учителя: проблемы, поиски, решения" - скачать презентации по Педагогике Общие сведения о системах автоматики, телемеханики, связи, вычислительной и космической технике
Общие сведения о системах автоматики, телемеханики, связи, вычислительной и космической технике Новости в Молдове
Новости в Молдове Ходовая часть автомобилей
Ходовая часть автомобилей Нуклеиновые кислоты: виды, принципы строения, биологическая роль
Нуклеиновые кислоты: виды, принципы строения, биологическая роль Увеличение производительности погружения железобетонных свай дизельными молотами
Увеличение производительности погружения железобетонных свай дизельными молотами Халықаралық сауда тәжірибесіндегі халықаралық есепайырысулар және сақтандыру
Халықаралық сауда тәжірибесіндегі халықаралық есепайырысулар және сақтандыру Алгоритмы планирования
Алгоритмы планирования Презентация Правовые основы государственной службы в РФ
Презентация Правовые основы государственной службы в РФ Lucid Disassembly SSD SOP 1202
Lucid Disassembly SSD SOP 1202 Понятие об имени прилагательном - презентация для начальной школы
Понятие об имени прилагательном - презентация для начальной школы Проездные документы и посадка пассажиров
Проездные документы и посадка пассажиров Механика грунтов. Свойства и характеристики грунтов. (Лекция 2)
Механика грунтов. Свойства и характеристики грунтов. (Лекция 2) Базалыќ жартылай ґткізгішті ќўралдар. Шала ґткізгіш диодтар (ШҐД)
Базалыќ жартылай ґткізгішті ќўралдар. Шала ґткізгіш диодтар (ШҐД) Создание 3D модели гайки накидной
Создание 3D модели гайки накидной Наурыз мейрамы
Наурыз мейрамы «Гармония». Адаптивная физическая культура
«Гармония». Адаптивная физическая культура