- Синтез цифрового регулятора асинхронного електропривода в MATLAB

Содержание
- 2. Актуальність проблеми Сьогодні особлива увага приділяється побудові систем керування електроприводів, структура яких містить пристрої цифрової техніки.
- 3. Мета роботи. Об’єкт і предмет дослідження Метою роботи є синтез цифрового регулятора асинхронного електроприводу в MATLAB.
- 4. Завдання дослідження Проаналізувати способи керування асинхронних електроприводів і визначити особливості математичного опису динамічної моделі системи векторного
- 5. Математичний опис асинхронного двигуна ① Еквівалентні напруги статора в системі x-y через фазні напруги ② Вирази
- 6. Структурна схема асинхронного двигуна в ортогональній системі координат (x-у) ⑥
- 7. Методи синтезу цифрових регуляторів Для синтезу цифрового регулятора зазвичай використовують кілька методів : безперервна передавальна функція
- 8. Загальна характеристика об’єкта керування Загальний вигляд токарного верстата 16Б16Т1 Кінематична схема верстата 16Б16Т1 ⑧
- 9. Функціональна схема векторної системи керування ⑨
- 10. Структурна схема векторної системи керування ⑩
- 11. Схема моделювання системи векторного керування асинхронного електропривода з цифровим регулятором швидкості ⑪
- 12. Внутрішня структура підсистеми Discrete PI Controller ⑫
- 13. Графіки перехідних процесів струму та кутової швидкості ⑬
- 14. Аналіз показників якості ⑭
- 15. Схема моделювання системи векторного керування асинхронного електропривода з безперервним та цифровим регуляторами швидкості ⑮
- 16. Графіки перехідних процесів Як видно з рисунків при однакових параметрах налаштування регуляторів швидкості, якість керування в
- 17. Розробка алгоритму керування для програмованих логічних контролерів ⑰
- 18. ВИСНОВКИ У магістерській роботі представлені результати, які узагальнюють теоретичні дослідження синтезу цифрового регулятора асинхронного електропривода в
- 20. Скачать презентацию
Актуальність проблеми
Сьогодні особлива увага приділяється побудові систем керування електроприводів, структура яких
Актуальність проблеми
Сьогодні особлива увага приділяється побудові систем керування електроприводів, структура яких
Мета роботи. Об’єкт і предмет дослідження
Метою роботи є синтез цифрового регулятора
Мета роботи. Об’єкт і предмет дослідження
Метою роботи є синтез цифрового регулятора
Завдання дослідження
Проаналізувати способи керування асинхронних електроприводів і визначити особливості математичного опису
Завдання дослідження
Проаналізувати способи керування асинхронних електроприводів і визначити особливості математичного опису
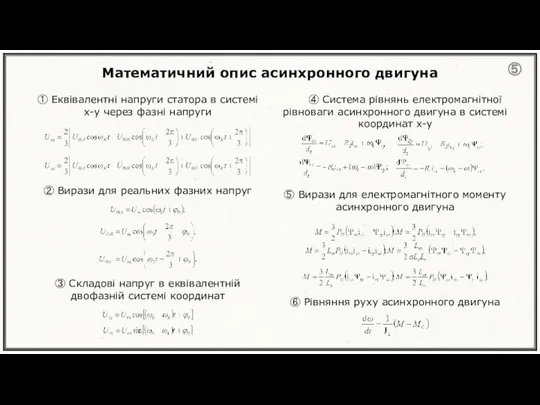
Математичний опис асинхронного двигуна
① Еквівалентні напруги статора в системі x-y через
Математичний опис асинхронного двигуна
① Еквівалентні напруги статора в системі x-y через

Структурна схема асинхронного двигуна
в ортогональній системі координат (x-у)
⑥
Структурна схема асинхронного двигуна
в ортогональній системі координат (x-у)
⑥
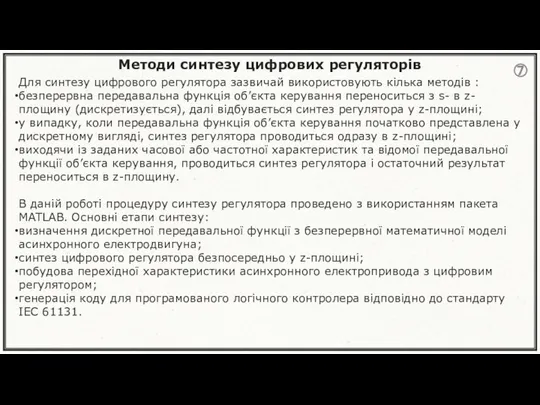
Методи синтезу цифрових регуляторів
Для синтезу цифрового регулятора зазвичай використовують кілька методів
Методи синтезу цифрових регуляторів
Для синтезу цифрового регулятора зазвичай використовують кілька методів

Загальна характеристика об’єкта керування
Загальний вигляд токарного верстата 16Б16Т1
Кінематична схема верстата 16Б16Т1
⑧
Загальна характеристика об’єкта керування
Загальний вигляд токарного верстата 16Б16Т1
Кінематична схема верстата 16Б16Т1
⑧

Функціональна схема векторної системи керування
⑨
Функціональна схема векторної системи керування
⑨

Структурна схема векторної системи керування
⑩
Структурна схема векторної системи керування
⑩
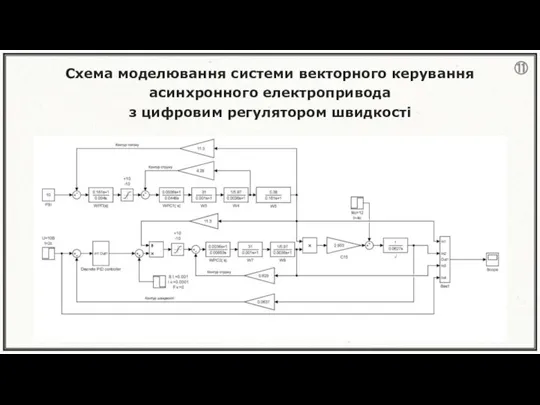
Схема моделювання системи векторного керування асинхронного електропривода
з цифровим регулятором швидкості
⑪
Схема моделювання системи векторного керування асинхронного електропривода
з цифровим регулятором швидкості
⑪
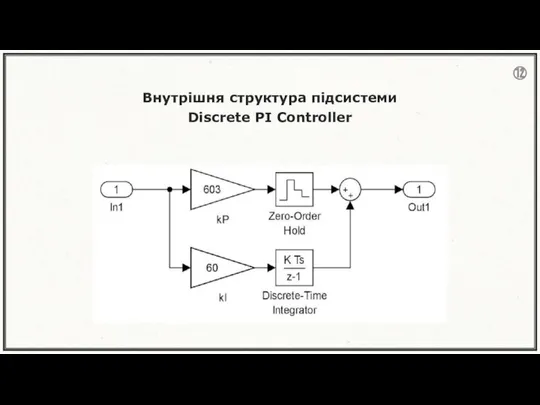
Внутрішня структура підсистеми
Discrete PI Controller
⑫
Внутрішня структура підсистеми
Discrete PI Controller
⑫
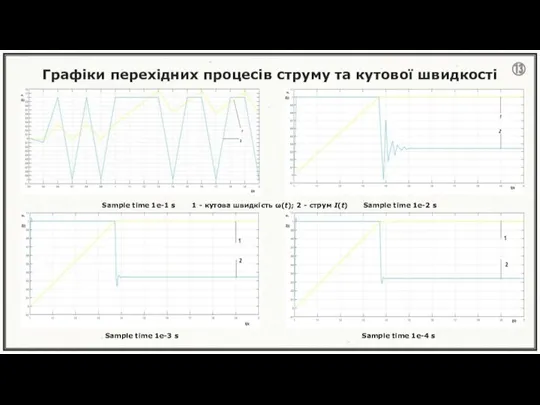
Графіки перехідних процесів струму та кутової швидкості
⑬
Графіки перехідних процесів струму та кутової швидкості
⑬
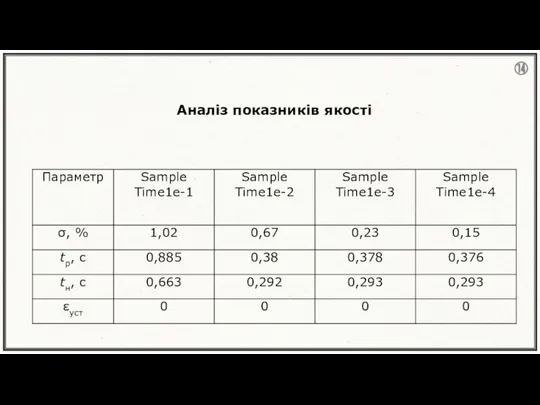
Аналіз показників якості
⑭
Аналіз показників якості
⑭

Схема моделювання системи векторного керування асинхронного електропривода
з безперервним та цифровим регуляторами
Схема моделювання системи векторного керування асинхронного електропривода з безперервним та цифровим регуляторами
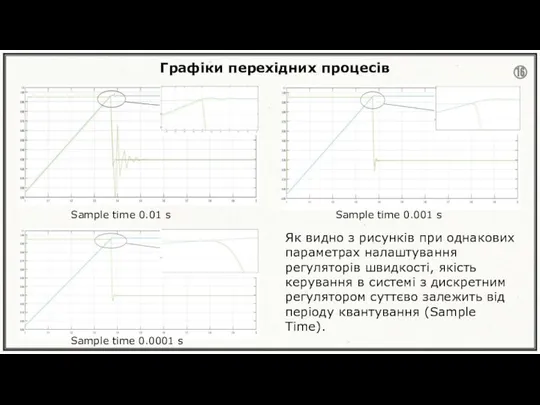
Графіки перехідних процесів
Як видно з рисунків при однакових параметрах налаштування регуляторів
Графіки перехідних процесів
Як видно з рисунків при однакових параметрах налаштування регуляторів
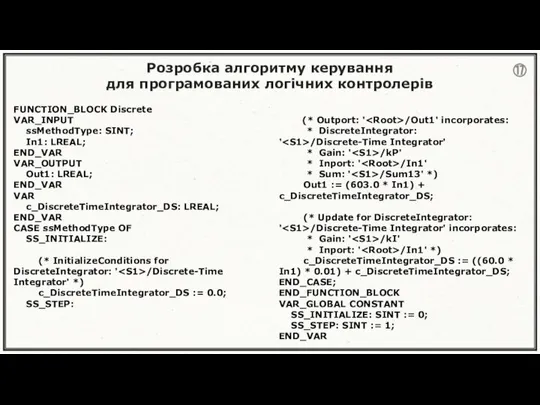
Розробка алгоритму керування
для програмованих логічних контролерів
⑰
Розробка алгоритму керування
для програмованих логічних контролерів
⑰
ВИСНОВКИ
У магістерській роботі представлені результати, які узагальнюють теоретичні дослідження синтезу цифрового
ВИСНОВКИ
У магістерській роботі представлені результати, які узагальнюють теоретичні дослідження синтезу цифрового
 Презентация на тему "Спид удетей" - скачать презентации по Медицине
Презентация на тему "Спид удетей" - скачать презентации по Медицине Алюминий
Алюминий Файлы и пространство имен System.IO
Файлы и пространство имен System.IO Управление рисками. Рейтинг стран по уровню риска
Управление рисками. Рейтинг стран по уровню риска Развитие велопешеходной инфраструктры Петрозаводского городского округа
Развитие велопешеходной инфраструктры Петрозаводского городского округа Принципы гражданского процессуального права
Принципы гражданского процессуального права Поверхность и контактные явления. Диод Шоттки
Поверхность и контактные явления. Диод Шоттки Стратегический анализ среды
Стратегический анализ среды  Мультипрограммирование на основе прерываний
Мультипрограммирование на основе прерываний Силовой вид спорта пауэрлифтинг
Силовой вид спорта пауэрлифтинг Simulated annealing algorithm в MathCAD
Simulated annealing algorithm в MathCAD Құбыр көлігі
Құбыр көлігі Спортивный травматизм
Спортивный травматизм Load testing with Visual Studio Enterprise 2015
Load testing with Visual Studio Enterprise 2015 My menu
My menu Презентация "Обзор нефтегазовой отрасли Казахстана" - скачать презентации по Экономике
Презентация "Обзор нефтегазовой отрасли Казахстана" - скачать презентации по Экономике 03.7.2012 г.1 КУРСОВА РАБОТА НА ГАЛИНА СТЕФАНОВА САВОВА ФАК. 20151019 СПЕЦИАЛНОСТ ПСИХОЛОГИЯ ПЪРВА ГРУПА ПРИЕЛ АС. М. ДЕШКОВА. - презентация
03.7.2012 г.1 КУРСОВА РАБОТА НА ГАЛИНА СТЕФАНОВА САВОВА ФАК. 20151019 СПЕЦИАЛНОСТ ПСИХОЛОГИЯ ПЪРВА ГРУПА ПРИЕЛ АС. М. ДЕШКОВА. - презентация Презентация Практика применения вывозных таможенных пошлин на нефть сырую и продукты, выработанные из нефти
Презентация Практика применения вывозных таможенных пошлин на нефть сырую и продукты, выработанные из нефти  Противомикробные, противовирусные и противопаразитарные лекарственные средства
Противомикробные, противовирусные и противопаразитарные лекарственные средства Дальние страны и древние времена как один из источников вдохновения эпохи модерна
Дальние страны и древние времена как один из источников вдохновения эпохи модерна Программирование на языке Паскаль
Программирование на языке Паскаль Детская площадка в Миллениум-Парк, Чикаго
Детская площадка в Миллениум-Парк, Чикаго Презентация "Продвижение сайта утками. Практические примеры" - скачать презентации по Экономике
Презентация "Продвижение сайта утками. Практические примеры" - скачать презентации по Экономике Металлический каркас одноэтажного промышленного здания
Металлический каркас одноэтажного промышленного здания Слайдовый сканер
Слайдовый сканер Модель теории очередей, или модель оптимального обслуживания
Модель теории очередей, или модель оптимального обслуживания Реконструкция части территории ботанического сада им. Б.М. Козо-Поянского. ВГУ (северная часть)
Реконструкция части территории ботанического сада им. Б.М. Козо-Поянского. ВГУ (северная часть) Семейство enterobact
Семейство enterobact