- Система автоматического управления торпедой

Содержание
- 2. Структурная схема САУ торпедой где Д1 – датчик давления; Р – редуктор; МП – микропроцессор Гт
- 3. Расчет датчика перемещения обратной связи Преобразование линейного перемещения в угол поворота источника света описывается зависимостью вида:
- 4. Проверка устойчивости САУ по критерию Шур-Кона Передаточная функция замкнутой САР: Переход от операторной формы к z
- 5. Логарифмические характеристики САУ ЛАЧХ КУ ЛАЧХ ЖЛАЧХ -20дБ/дек -60дБ/дек -40дБ/дек Передаточная функция разомкнутой системы: Передаточная функция
- 6. Выбор последовательного корректирующего устройства Передаточная функция корректирующего устройства: где T1=R2∙C2= 15,152; T2= Задаемся значением: С1=10 мкФ.
- 7. Алгоритм работы программы коррекции Разностное уравнение: начало yk-1=0; xk-1=0; xk-2=0; Чтение входного сигнала и помещение его
- 9. Скачать презентацию
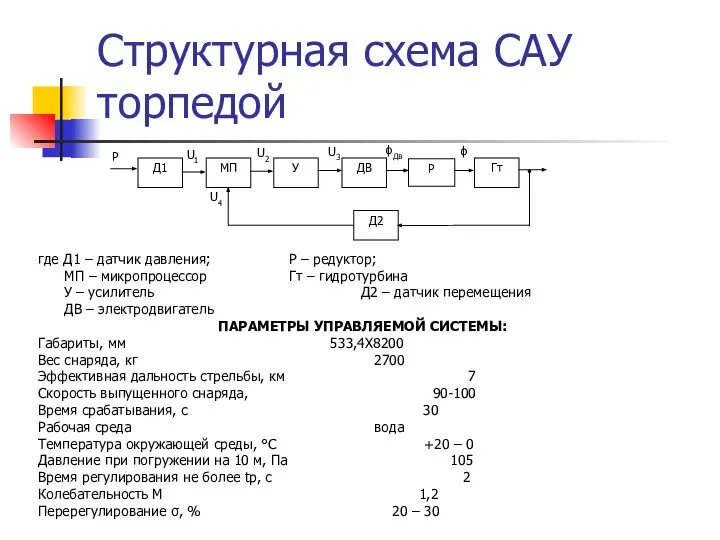
Структурная схема САУ торпедой
где Д1 – датчик давления; Р – редуктор;
Структурная схема САУ торпедой
где Д1 – датчик давления; Р – редуктор;

Расчет датчика перемещения обратной связи
Преобразование линейного перемещения в угол поворота источника
Расчет датчика перемещения обратной связи
Преобразование линейного перемещения в угол поворота источника
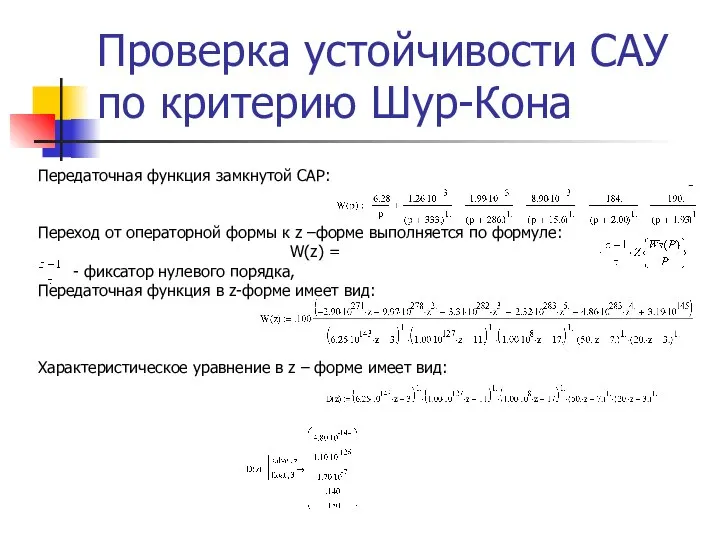
Проверка устойчивости САУ по критерию Шур-Кона
Передаточная функция замкнутой САР:
Переход от операторной
Проверка устойчивости САУ по критерию Шур-Кона
Передаточная функция замкнутой САР:
Переход от операторной
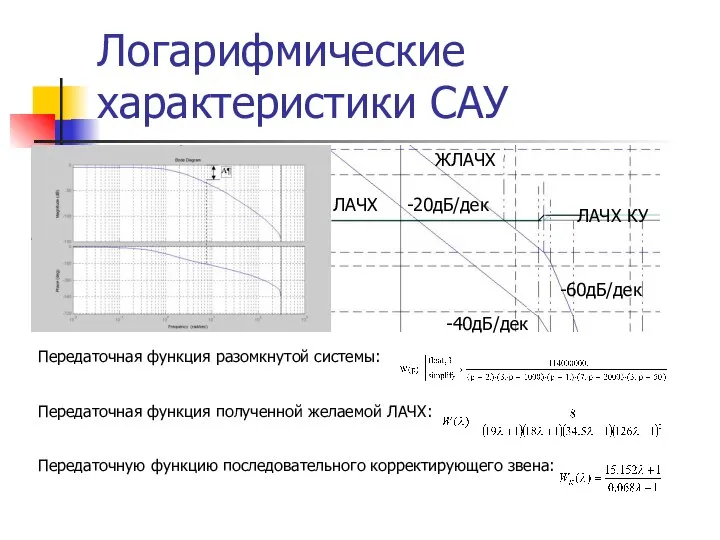
Логарифмические характеристики САУ
ЛАЧХ КУ
ЛАЧХ
ЖЛАЧХ
-20дБ/дек
-60дБ/дек
-40дБ/дек
Передаточная функция разомкнутой системы:
Передаточная функция полученной желаемой ЛАЧХ:
Передаточную
Логарифмические характеристики САУ
ЛАЧХ КУ
ЛАЧХ
ЖЛАЧХ
-20дБ/дек
-60дБ/дек
-40дБ/дек
Передаточная функция разомкнутой системы:
Передаточная функция полученной желаемой ЛАЧХ:
Передаточную
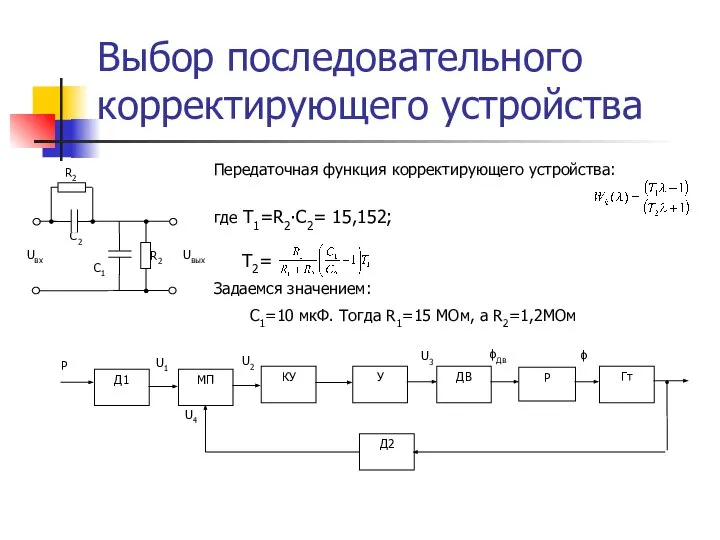
Выбор последовательного корректирующего устройства
Передаточная функция корректирующего устройства:
где T1=R2∙C2= 15,152;
T2=
Выбор последовательного корректирующего устройства
Передаточная функция корректирующего устройства:
где T1=R2∙C2= 15,152;
T2=
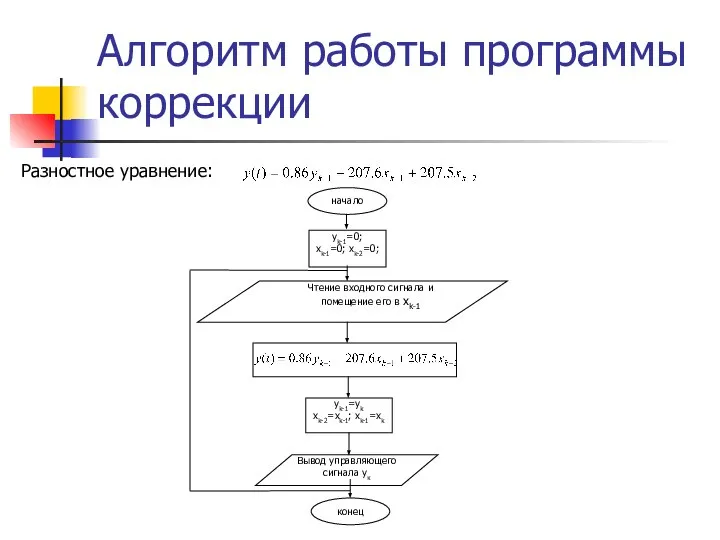
Алгоритм работы программы коррекции
Разностное уравнение:
начало
yk-1=0;
xk-1=0; xk-2=0;
Чтение входного сигнала и помещение
Алгоритм работы программы коррекции
Разностное уравнение:
начало
yk-1=0;
xk-1=0; xk-2=0;
Чтение входного сигнала и помещение
 Мы вместе, мы в финале. МБОУ «Школа №75»
Мы вместе, мы в финале. МБОУ «Школа №75» Дифференциальный диагноз очаговых образований в легких
Дифференциальный диагноз очаговых образований в легких Рационализация размещения товара на складе на примере предприятия ООО «Гекса – нетканые материалы»
Рационализация размещения товара на складе на примере предприятия ООО «Гекса – нетканые материалы» СИСТЕМЫ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
СИСТЕМЫ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ  Функциональная анатомия конечного мозга
Функциональная анатомия конечного мозга  Теория железобетона
Теория железобетона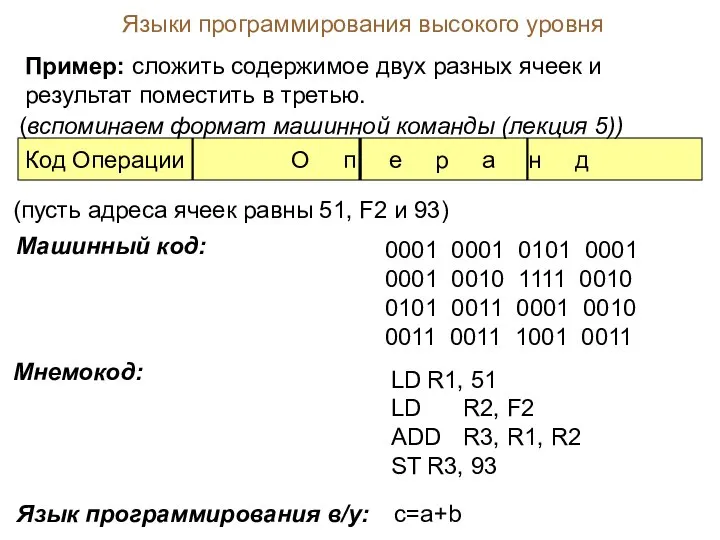 Языки программирования высокого уровня
Языки программирования высокого уровня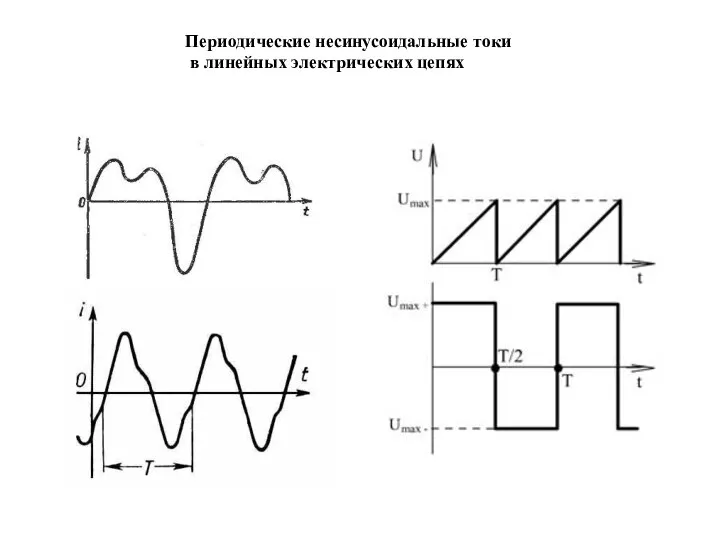 Периодические несинусоидальные токи в линейных электрических цепях
Периодические несинусоидальные токи в линейных электрических цепях СЕГМЕНТИРОВАНИЕ РЫНКА 1. Сущность, значение и признаки сегментирования рынка 2. Маркетинговые стратегии охвата рынка и процесс по
СЕГМЕНТИРОВАНИЕ РЫНКА 1. Сущность, значение и признаки сегментирования рынка 2. Маркетинговые стратегии охвата рынка и процесс по Java4 (Наследование и массивы)
Java4 (Наследование и массивы) Вводные предложения - презентация для начальной школы
Вводные предложения - презентация для начальной школы Презентация на тему «Инфаркт миокарда»
Презентация на тему «Инфаркт миокарда» Машинный язык
Машинный язык  Кротко
Кротко Национальная экономика презентация. Республика Беларусь
Национальная экономика презентация. Республика Беларусь Презентация культура первобытного общества
Презентация культура первобытного общества Наемник или собственник
Наемник или собственник  4. Java OOP. 4. Inheritance and Polymorphism
4. Java OOP. 4. Inheritance and Polymorphism Политическая экономия современного капитализма: неомарксистский синтез и его задачи
Политическая экономия современного капитализма: неомарксистский синтез и его задачи Ребусы по математике
Ребусы по математике  Израильское и Иудейское царства
Израильское и Иудейское царства Diagnosis and troubleshooting of automotive electrical
Diagnosis and troubleshooting of automotive electrical Софіївський парк
Софіївський парк Факторы производства
Факторы производства  Набережные Челны – центр двух религий
Набережные Челны – центр двух религий Нелінійне програмування
Нелінійне програмування Республиканский центр детско-юношеского туризма
Республиканский центр детско-юношеского туризма Cудебный контроль за законностью осуществления исполнительной власти Созинов А.А. Э091
Cудебный контроль за законностью осуществления исполнительной власти Созинов А.А. Э091