- Строительная механика. Методы определения силовых факторов в деформируемых системах

Содержание
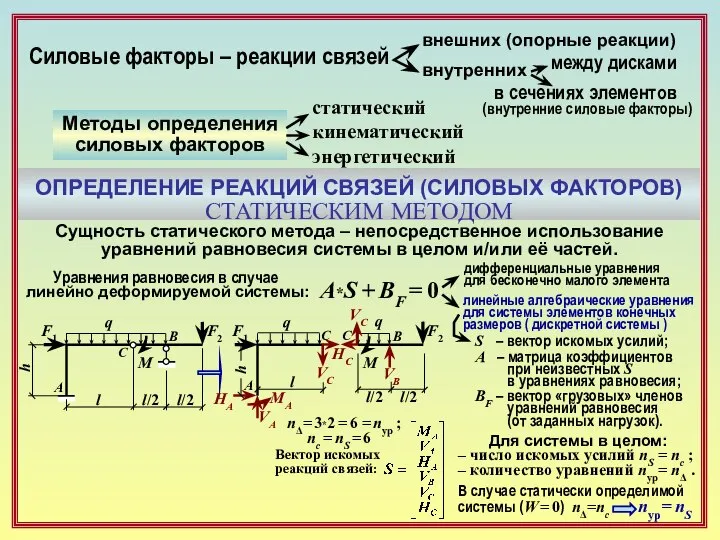
- 2. Силовые факторы – реакции связей внешних (опорные реакции) внутренних между дисками в сечениях элементов (внутренние силовые
- 3. Силовые факторы – реакции связей внешних (опорные реакции) внутренних между дисками в сечениях элементов (внутренние силовые
- 4. Силовые факторы – реакции связей внешних (опорные реакции) внутренних между дисками в сечениях элементов (внутренние силовые
- 5. Силовые факторы – реакции связей внешних (опорные реакции) внутренних между дисками в сечениях элементов (внутренние силовые
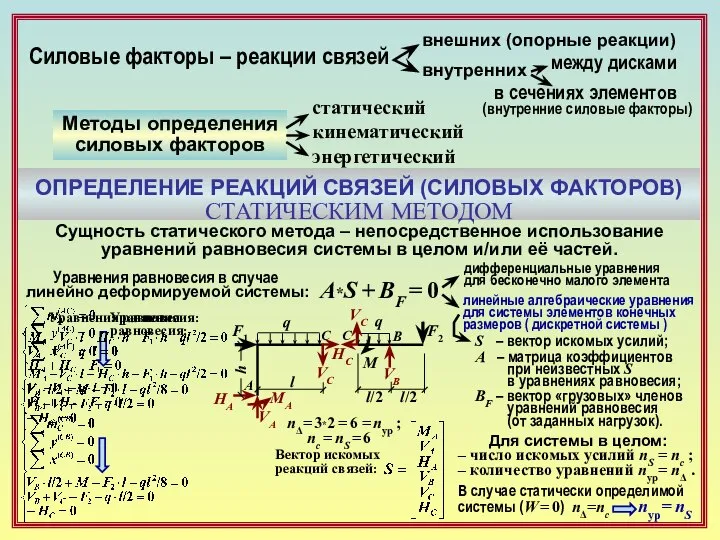
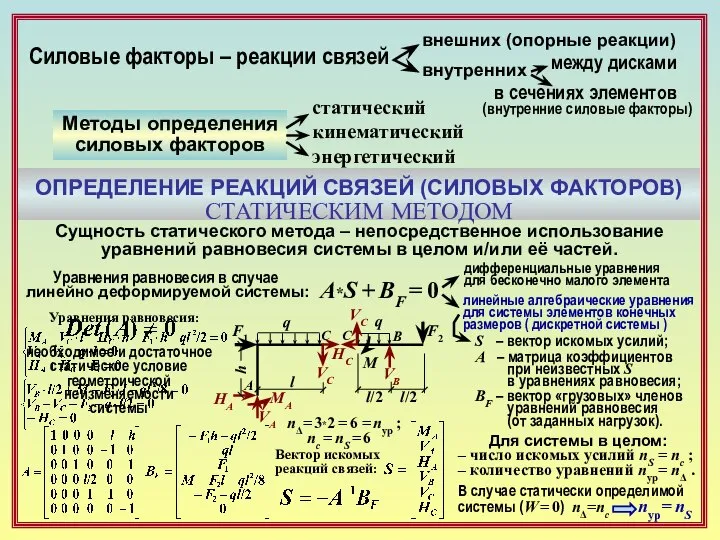
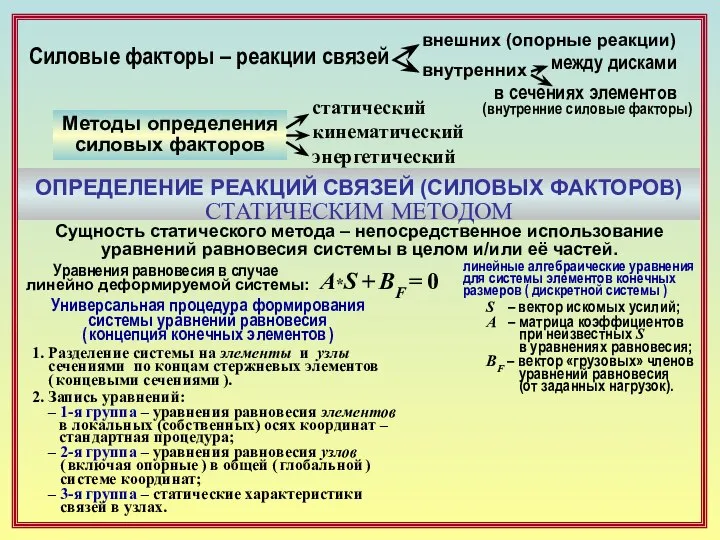
- 6. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ) СТАТИЧЕСКИМ МЕТОДОМ A*S + BF = 0 Универсальная процедура формирования системы
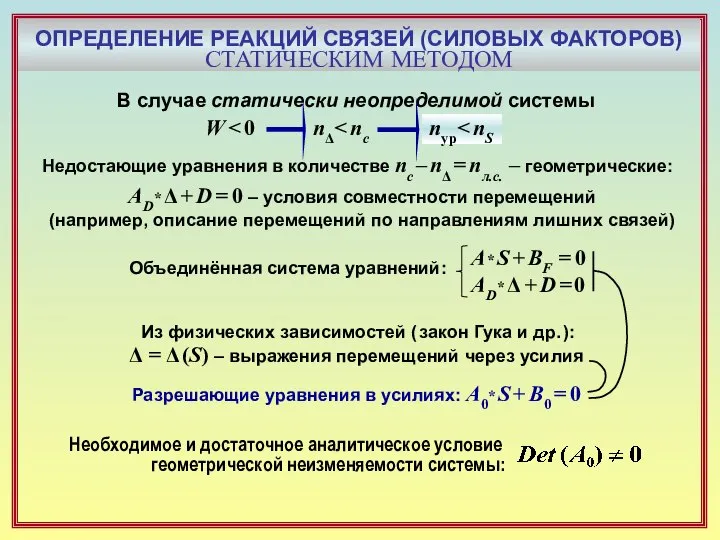
- 7. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ) СТАТИЧЕСКИМ МЕТОДОМ В случае статически неопределимой системы W nΔ nyp Недостающие
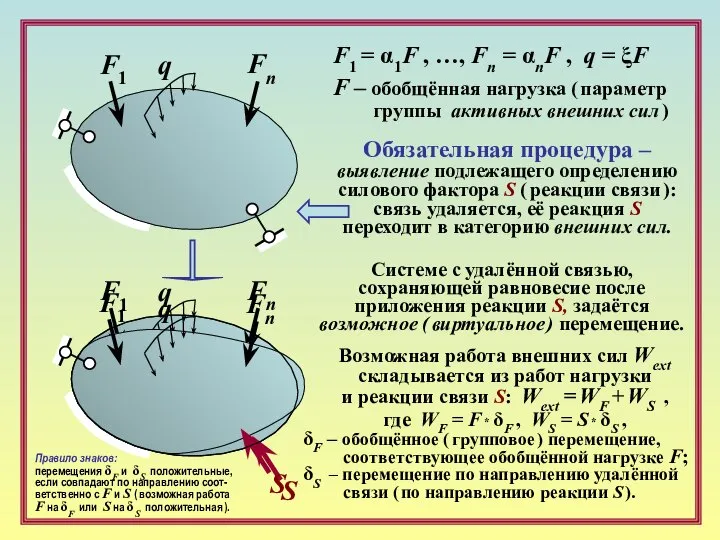
- 8. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ) КИНЕМАТИЧЕСКИМ МЕТОДОМ В основе метода – принцип возможных перемещений ( принцип
- 9. Возможные (виртуальные) перемещения – а) бесконечно малые ( для линейно деформируемых систем – конечные, но малые
- 10. q F1 Fn F1 = α1F , …, Fn = αnF , q = ξF F
- 11. Алгоритм определения реакции связи кинематическим методом 1. В системе, находящейся в равновесном деформированном состоянии при заданной
- 12. Алгоритм определения реакции связи кинематическим методом 1. В системе, находящейся в равновесном деформированном состоянии при заданной
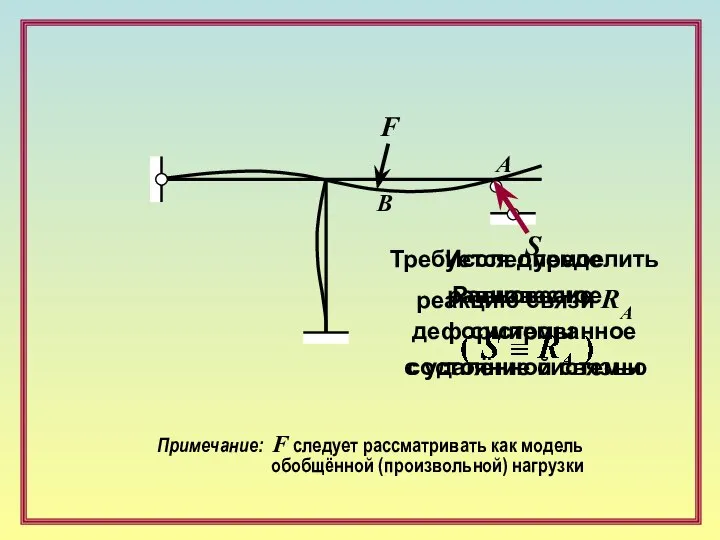
- 13. А Требуется определить реакцию связи RA B F Исследуемое равновесное деформированное состояние системы S Равновесие системы
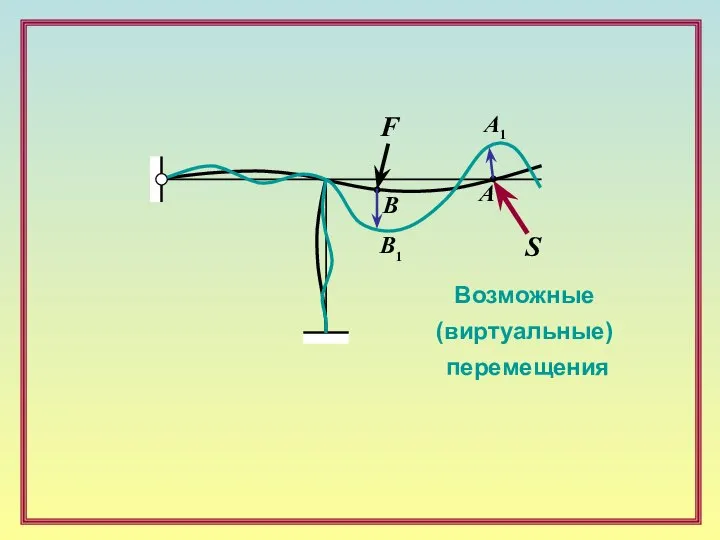
- 14. B F А S Возможные (виртуальные) перемещения B1 A1
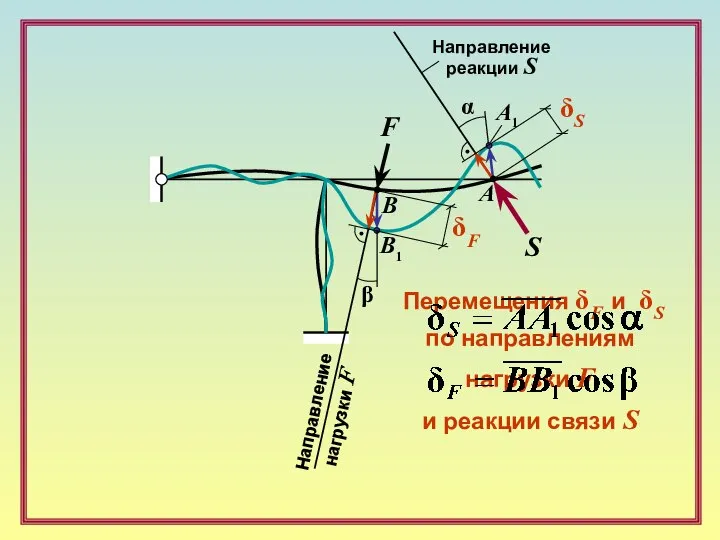
- 15. B F А S Перемещения δF и δS по направлениям нагрузки F и реакции связи S
- 16. Удаление внутренних связей . Смысл перемещения δS 1. Удаление внутренней угловой связи для определения изгибающего момента
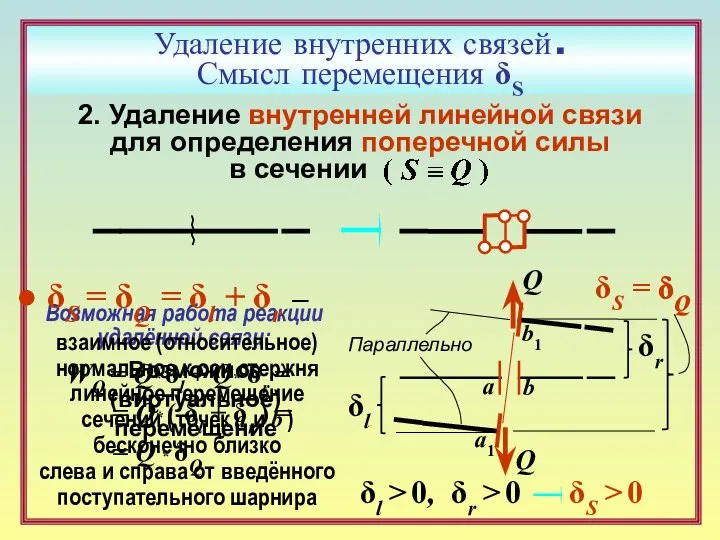
- 17. Удаление внутренних связей . Смысл перемещения δS 2. Удаление внутренней линейной связи для определения поперечной силы
- 18. Удаление внутренних связей . Смысл перемещения δS 2. Удаление внутренней линейной связи для определения поперечной силы
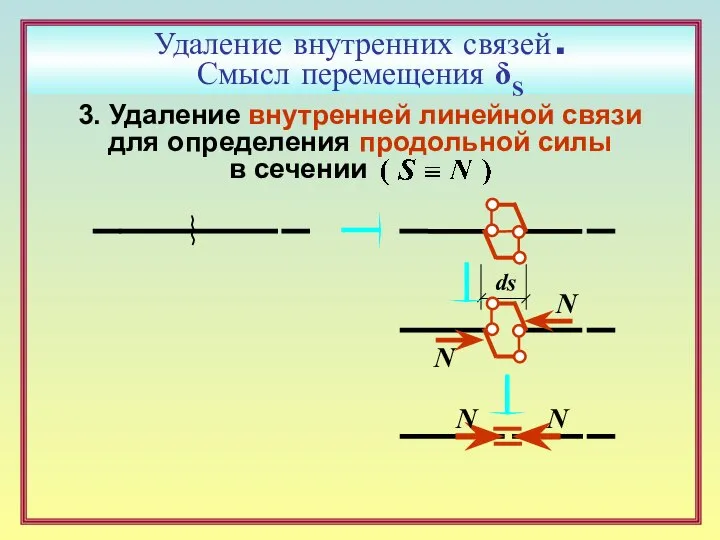
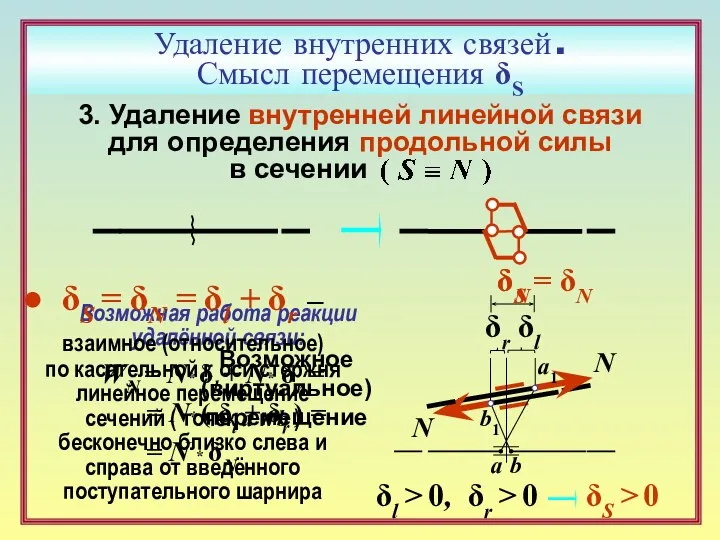
- 19. Удаление внутренних связей . Смысл перемещения δS 3. Удаление внутренней линейной связи для определения продольной силы
- 20. Удаление внутренних связей . Смысл перемещения δS 3. Удаление внутренней линейной связи для определения продольной силы
- 21. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ) ЭНЕРГЕТИЧЕСКИМ МЕТОДОМ Силовой фактор S в линейно деформируемой системе определяется как
- 22. К о н т р о л ь н ы е в о п р о
- 24. Скачать презентацию
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
Силовые факторы – реакции связей
внешних (опорные реакции)
внутренних
между дисками
в сечениях
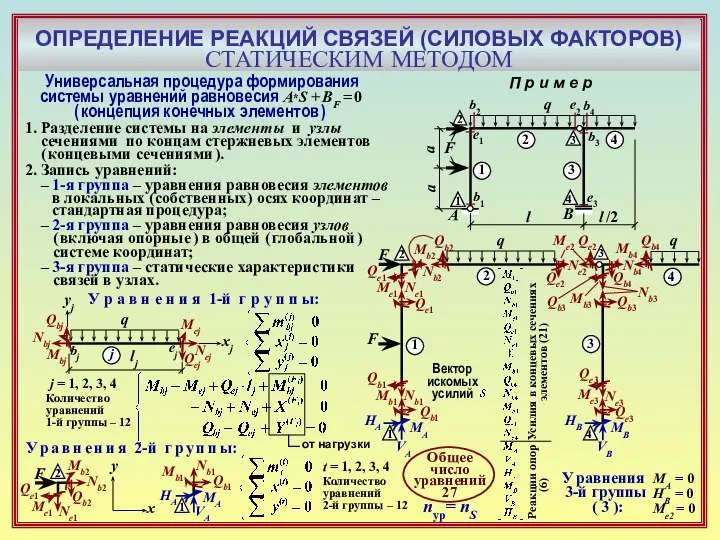
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
СТАТИЧЕСКИМ МЕТОДОМ
A*S + BF = 0
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
СТАТИЧЕСКИМ МЕТОДОМ
A*S + BF = 0
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
СТАТИЧЕСКИМ МЕТОДОМ
В случае статически неопределимой системы
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
СТАТИЧЕСКИМ МЕТОДОМ
В случае статически неопределимой системы
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ
(СИЛОВЫХ ФАКТОРОВ)
КИНЕМАТИЧЕСКИМ МЕТОДОМ
В основе метода – принцип
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ
(СИЛОВЫХ ФАКТОРОВ)
КИНЕМАТИЧЕСКИМ МЕТОДОМ
В основе метода – принцип
Возможные (виртуальные)
перемещения –
а) бесконечно малые ( для линейно
деформируемых
Возможные (виртуальные)
перемещения –
а) бесконечно малые ( для линейно
деформируемых
q
F1
Fn
F1 = α1F , …, Fn = αnF , q =
q
F1
Fn
F1 = α1F , …, Fn = αnF , q =
Алгоритм
определения реакции связи
кинематическим методом
1. В системе, находящейся в равновесном деформированном
состоянии
Алгоритм
определения реакции связи
кинематическим методом
1. В системе, находящейся в равновесном деформированном
состоянии
Алгоритм
определения реакции связи
кинематическим методом
1. В системе, находящейся в равновесном деформированном
состоянии
Алгоритм
определения реакции связи
кинематическим методом
1. В системе, находящейся в равновесном деформированном
состоянии
А
Требуется определить
реакцию связи RA
B
F
Исследуемое
равновесное
деформированное
состояние системы
S
Равновесие
системы
с удалённой связью
Примечание: F следует рассматривать
А
Требуется определить
реакцию связи RA
B
F
Исследуемое
равновесное
деформированное
состояние системы
S
Равновесие
системы
с удалённой связью
Примечание: F следует рассматривать
B
F
А
S
Возможные
(виртуальные)
перемещения
B1
A1
B
F
А
S
Возможные
(виртуальные)
перемещения
B1
A1
B
F
А
S
Перемещения δF и δS
по направлениям
нагрузки F
и реакции связи S
B1
A1
Направление
нагрузки
B
F
А
S
Перемещения δF и δS
по направлениям
нагрузки F
и реакции связи S
B1
A1
Направление
нагрузки
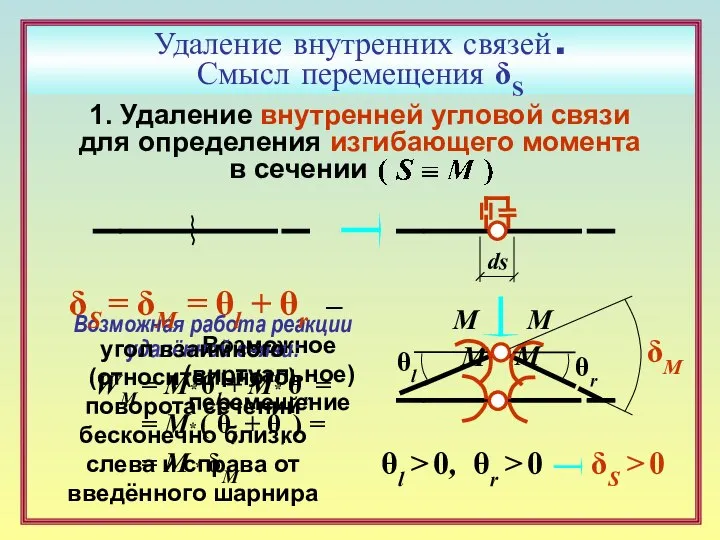
Удаление внутренних связей .
Смысл перемещения δS
1. Удаление внутренней угловой связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
1. Удаление внутренней угловой связи
для определения
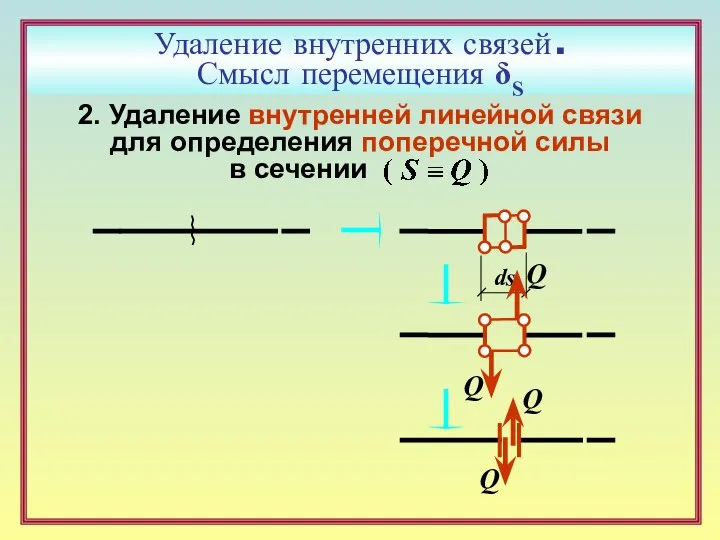
Удаление внутренних связей .
Смысл перемещения δS
2. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
2. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
2. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
2. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
3. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
3. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
3. Удаление внутренней линейной связи
для определения
Удаление внутренних связей .
Смысл перемещения δS
3. Удаление внутренней линейной связи
для определения
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
ЭНЕРГЕТИЧЕСКИМ МЕТОДОМ
Силовой фактор S в линейно
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ (СИЛОВЫХ ФАКТОРОВ)
ЭНЕРГЕТИЧЕСКИМ МЕТОДОМ
Силовой фактор S в линейно
К о н т р о л ь н ы е
К о н т р о л ь н ы е
 ANTIChNOST_I_ANTIChNAYa_LITERATURA
ANTIChNOST_I_ANTIChNAYa_LITERATURA Анализ методов воздействия на призабойную зону пласта в условиях объекта АВ1 Самотлорского месторождения
Анализ методов воздействия на призабойную зону пласта в условиях объекта АВ1 Самотлорского месторождения .Ильяшенко
.Ильяшенко Компьютерная томография. Современные виды томографии
Компьютерная томография. Современные виды томографии Электрическая дуга. Вольтова дуга, дуговой разряд
Электрическая дуга. Вольтова дуга, дуговой разряд Город Шахты - город олимпийских чемпионов
Город Шахты - город олимпийских чемпионов Business environment: evaluation tools and impact assessment. (Lecture 1)
Business environment: evaluation tools and impact assessment. (Lecture 1) Презентация на тему: «1736: Клаудиус Айманд провёл первую успешную аппендэктомию.»
Презентация на тему: «1736: Клаудиус Айманд провёл первую успешную аппендэктомию.» Общая характеристика процессов сбора, хранения, передачи информации
Общая характеристика процессов сбора, хранения, передачи информации Лямбда-зонд. Кисневий сенсор
Лямбда-зонд. Кисневий сенсор Моя любимая страна. Китай как держава
Моя любимая страна. Китай как держава Эгейская культура. Крит
Эгейская культура. Крит Цели и задачи финансового менеджмента
Цели и задачи финансового менеджмента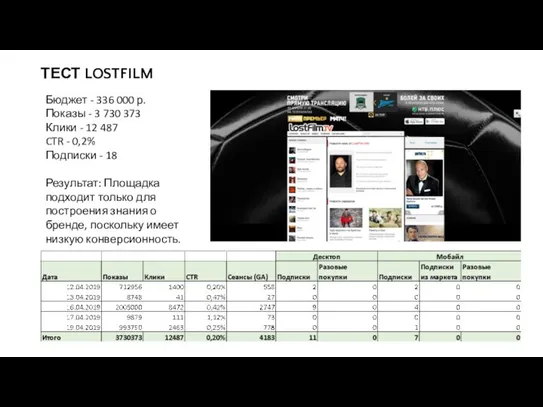 Тест Lostfilm
Тест Lostfilm Использование передовой осветительной техники. Понятие о светорегуляторах (диммеры)
Использование передовой осветительной техники. Понятие о светорегуляторах (диммеры) CLIL-метод. Почему я его использую на своих уроках?
CLIL-метод. Почему я его использую на своих уроках? Отслеживание событий: Назначение и использование, код отслеживания событий
Отслеживание событий: Назначение и использование, код отслеживания событий Парогазовые установки на твердом топливе (ПГУ-Т). Лекция 15
Парогазовые установки на твердом топливе (ПГУ-Т). Лекция 15 Презентация на тему "Информационные технологии в деятельности учителя-предметника" - скачать презентации по Педагогике
Презентация на тему "Информационные технологии в деятельности учителя-предметника" - скачать презентации по Педагогике Территориальное планирование
Территориальное планирование Детская площадка в melis stoke park
Детская площадка в melis stoke park Конфликтность
Конфликтность ИТ инициатива Java 8
ИТ инициатива Java 8 Трансформатори струму. Вимірювальні трансформатори
Трансформатори струму. Вимірювальні трансформатори Презентация по алгебре Уравнения с параметрами
Презентация по алгебре Уравнения с параметрами  Обработка двумерных массивов. (Лекция 9)
Обработка двумерных массивов. (Лекция 9) ЗАДАЧА ОБ ОПТИМАЛЬНОМ РАСПРЕДЕЛЕНИИ РЕСУРСОВ
ЗАДАЧА ОБ ОПТИМАЛЬНОМ РАСПРЕДЕЛЕНИИ РЕСУРСОВ  Эффективное позиционирование в социальных сетях
Эффективное позиционирование в социальных сетях