- Т8 РЛС Б І В.ppt

Содержание
- 2. * РЛС безперервного випромінювання. Некогерентні імпульсні РЛС. Когерентні імпульсні РЛС. Застосування РЛС безперервного та імпульсного випромінювання.
- 3. * Контрольні завдання (РЛС Б І В) Поясніть, як застосувати функцію та діаграму невизначеності зондуючого сигналу
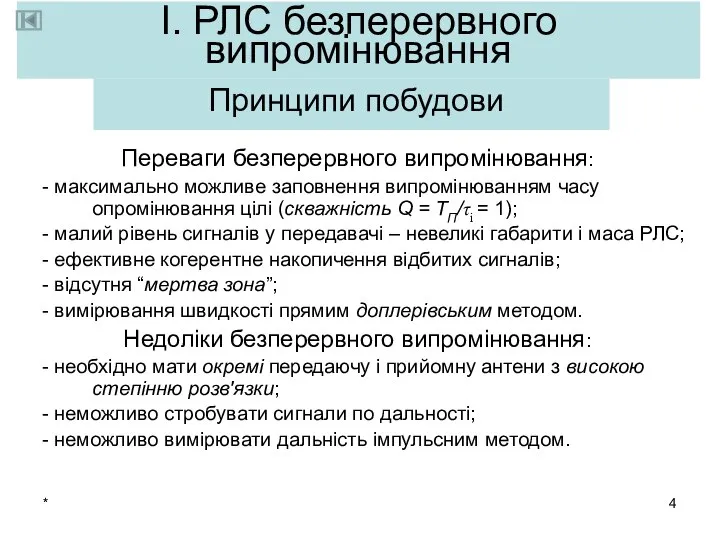
- 4. * І. РЛС безперервного випромінювання Переваги безперервного випромінювання: - максимально можливе заповнення випромінюванням часу опромінювання цілі
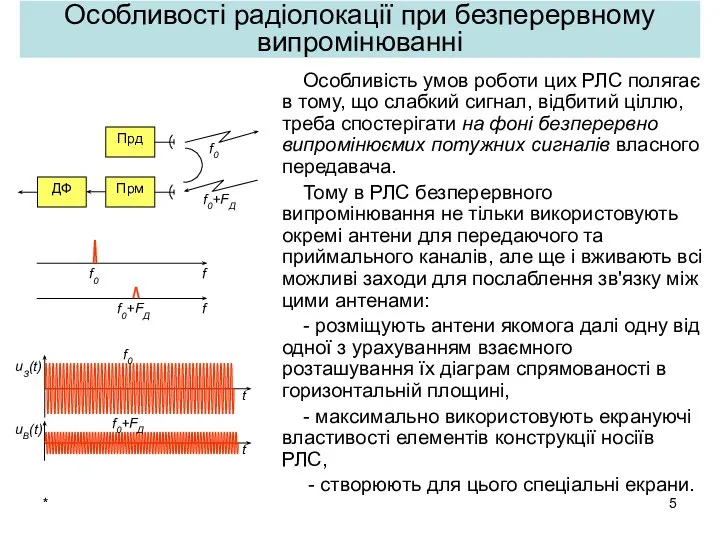
- 5. * Особливості радіолокації при безперервному випромінюванні Особливість умов роботи цих РЛС полягає в тому, що слабкий
- 6. Навіть при безперервній роботі передавача опромінення цілі обмежено у часі внаслідок пошукового переміщення антени РЛС при
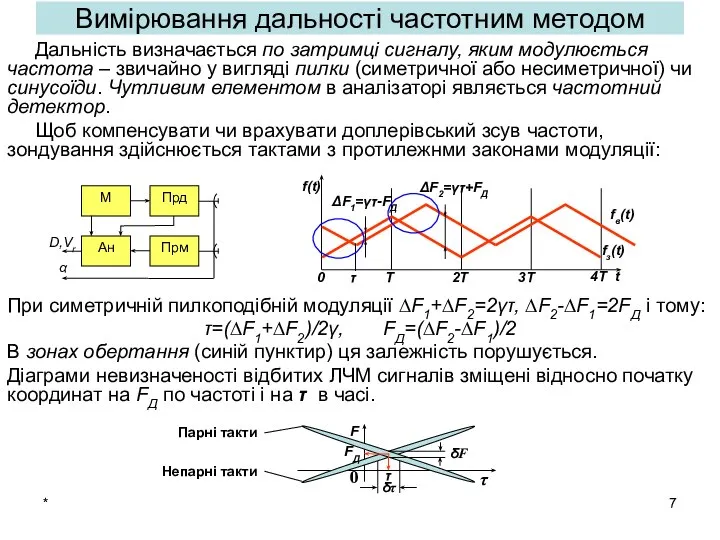
- 7. * Вимірювання дальності частотним методом Дальність визначається по затримці сигналу, яким модулюється частота – звичайно у
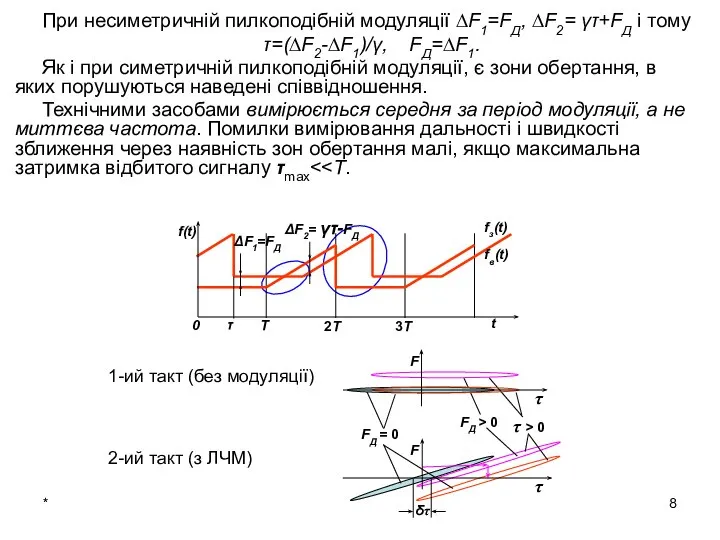
- 8. * При несиметричній пилкоподібній модуляції ∆F1=FД, ∆F2= γτ+FД і тому τ=(∆F2-∆F1)/γ, FД=∆F1. Як і при симетричній
- 9. Вимірювання дальності фазовим методом Чутливим елементом в аналізаторі являється фазовий детектор, який може однозначно визначати різницю
- 10. * Особливості та області застосування РЛС БВ Особливості. Імпульсна потужність дорівнює середній, малі габарити і маса,
- 11. * Доплерівські вимірювачі швидкості і кута зносу Вектор шляхової швидкості (1) W є сума векторів повітряної
- 12. * В чотирьохпроменевому вимірювачі швидкість зближення з ділянками підстилаючої поверхні 1 ... 4 залежить від повітряної
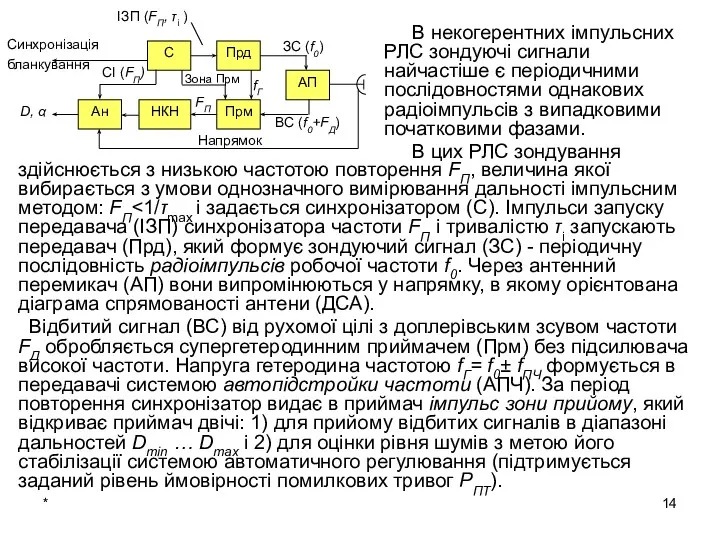
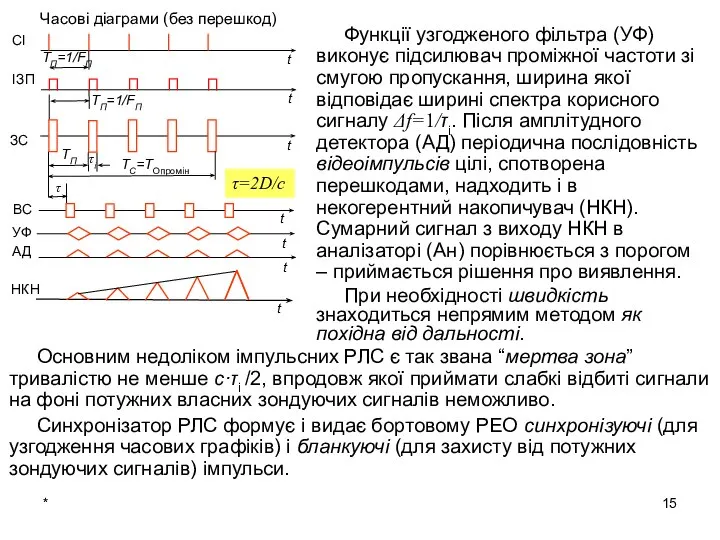
- 13. * 2. Некогерентні імпульсні РЛС Функція невизначеності некогерентної пачки однакових періодичних радіоімпульсів з прямокутною обвідною така
- 14. * здійснюється з низькою частотою повторення FП, величина якої вибирається з умови однозначного вимірювання дальності імпульсним
- 15. * Основним недоліком імпульсних РЛС є так звана “мертва зона” тривалістю не менше с·τі /2, впродовж
- 16. * Некогерентні імпульсні РЛС прості: вимірюють дві або три координати, мають мертву зону, одну антену, систему
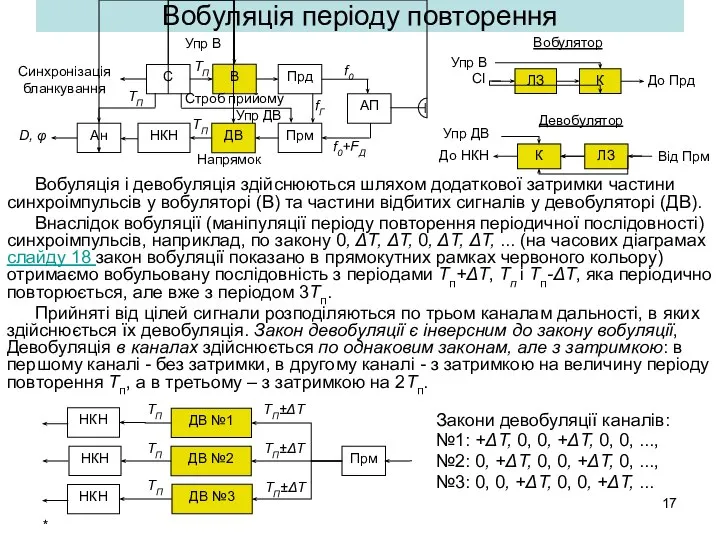
- 17. * Вобуляція періоду повторення Вобуляція і девобуляція здійснюються шляхом додаткової затримки частини синхроімпульсів у вобуляторі (В)
- 18. Закон девобуляції для сигналів, затримка яких Тп В послідовності відбитих сигналів з затримкою 0
- 19. * Насьогодні ще експлуатується велика кількість РЛС, які по принципам побудови відносяться до некогерентних імпульсних. Особливості
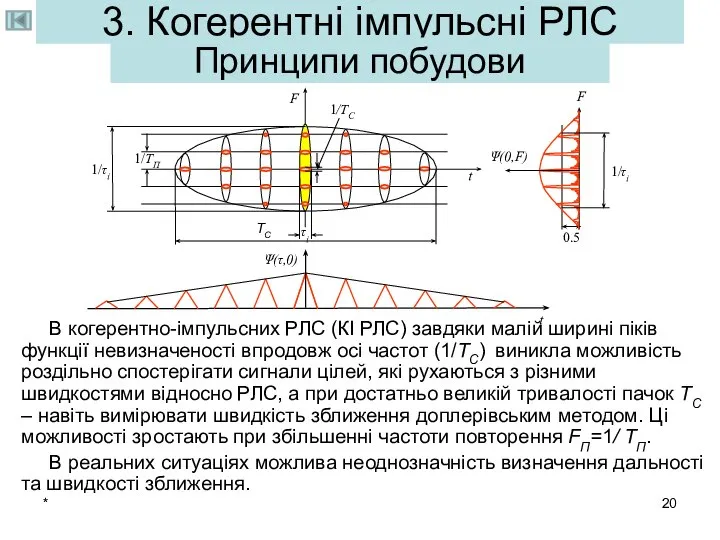
- 20. * 3. Когерентні імпульсні РЛС В когерентно-імпульсних РЛС (КІ РЛС) завдяки малій ширині піків функції невизначеності
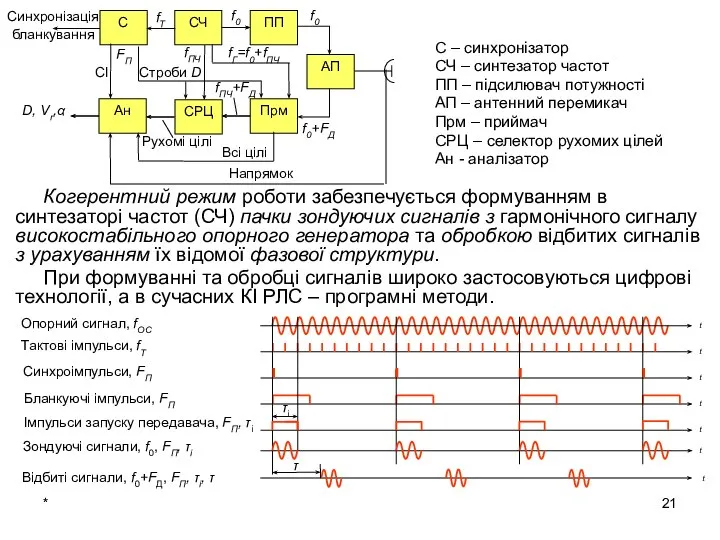
- 21. * Когерентний режим роботи забезпечується формуванням в синтезаторі частот (СЧ) пачки зондуючих сигналів з гармонічного сигналу
- 22. * Когерентні імпульсні РЛС (КІ РЛС) мають кращі характеристики, ніж некогерентні, тому що в них під
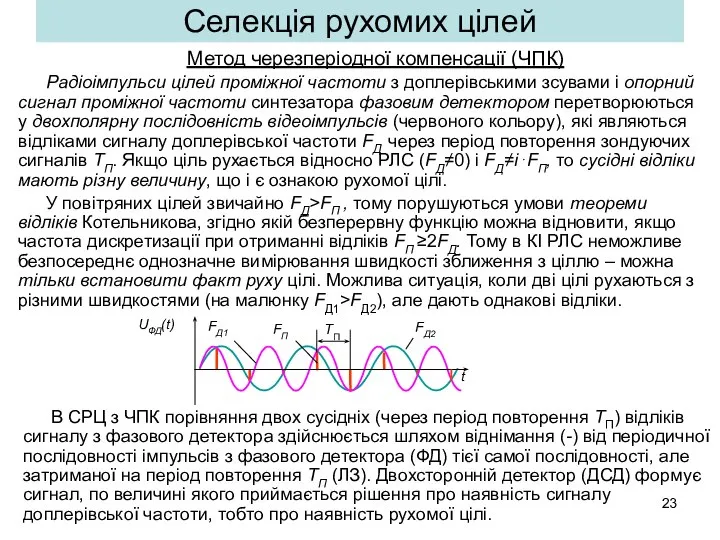
- 23. Селекція рухомих цілей Метод черезперіодної компенсації (ЧПК) Радіоімпульси цілей проміжної частоти з доплерівськими зсувами і опорний
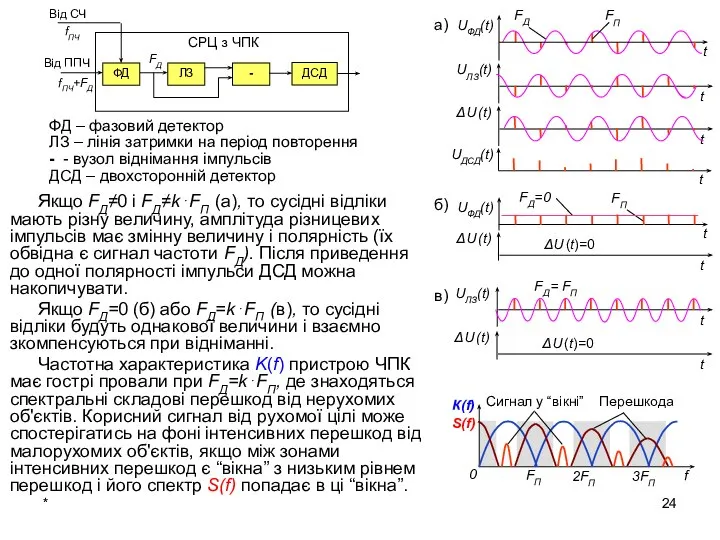
- 24. * Якщо FД≠0 і FД≠k⋅FП (а), то сусідні відліки мають різну величину, амплітуда різницевих імпульсів має
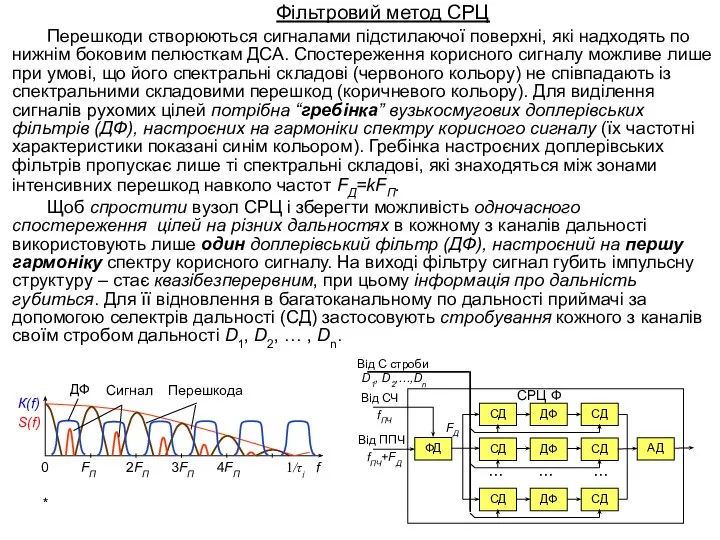
- 25. * Фільтровий метод СРЦ Перешкоди створюються сигналами підстилаючої поверхні, які надходять по нижнім боковим пелюсткам ДСА.
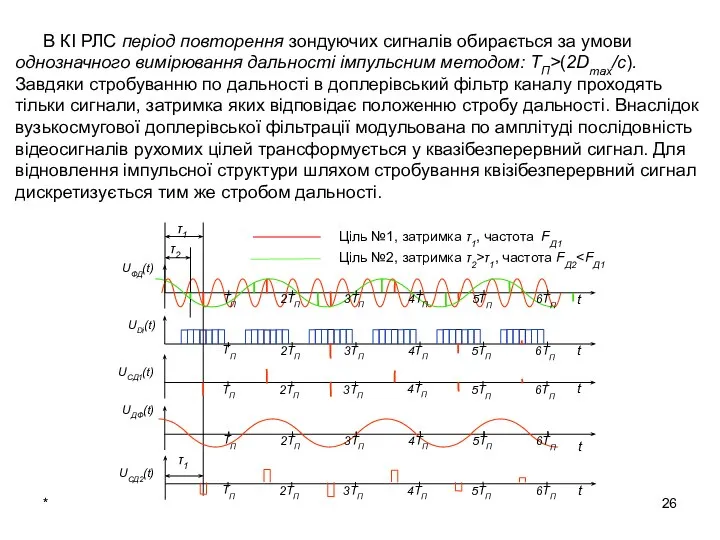
- 26. * В КІ РЛС період повторення зондуючих сигналів обирається за умови однозначного вимірювання дальності імпульсним методом:
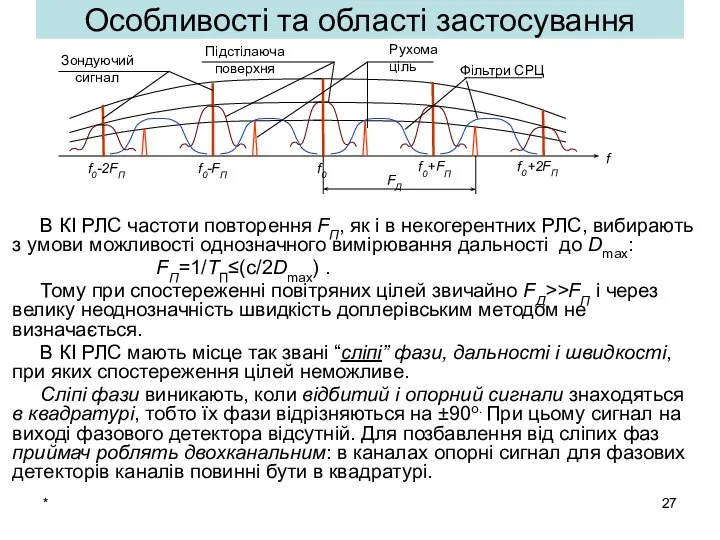
- 27. * Особливості та області застосування В КІ РЛС частоти повторення FП, як і в некогерентних РЛС,
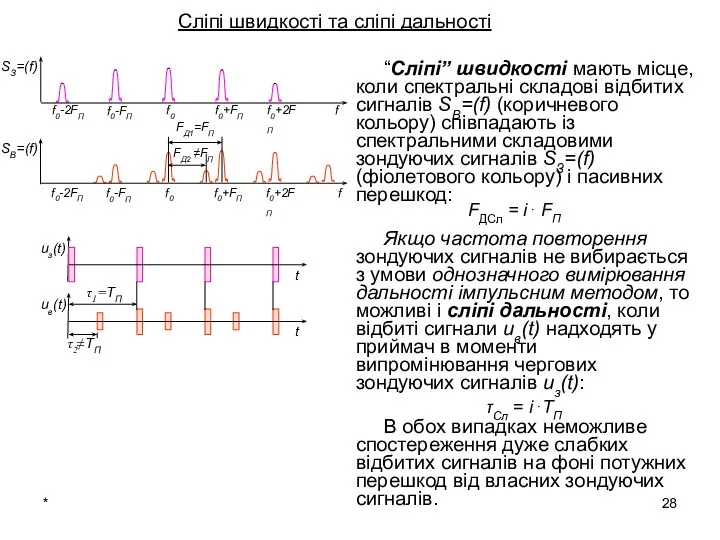
- 28. * “Сліпі” швидкості мають місце, коли спектральні складові відбитих сигналів SВ=(f) (коричневого кольору) співпадають із спектральними
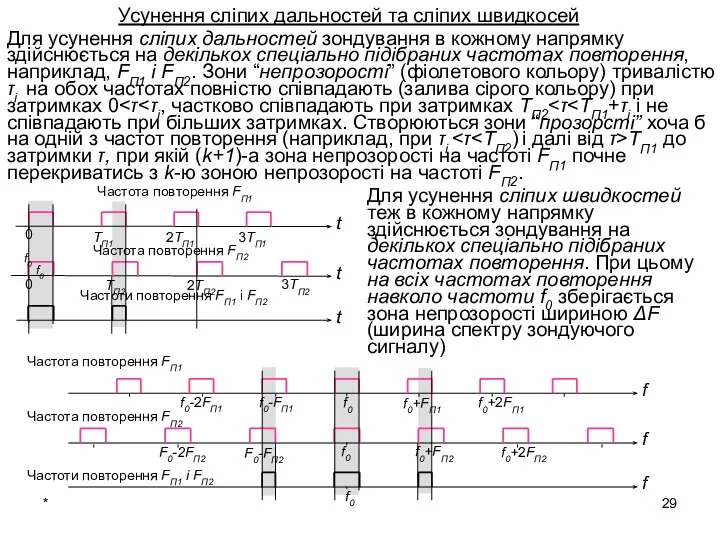
- 29. * Для усунення сліпих швидкостей теж в кожному напрямку здійснюється зондування на декількох спеціально підібраних частотах
- 30. Вікна прозорості При будь-якому наборі частот (періодів) повторення залишається непрозорою по часу зона в межах 0
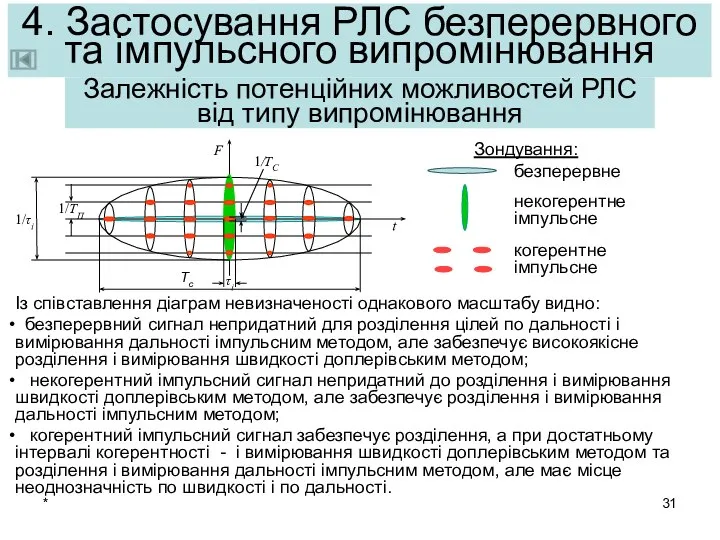
- 31. * 4. Застосування РЛС безперервного та імпульсного випромінювання Із співставлення діаграм невизначеності однакового масштабу видно: безперервний
- 32. * Області застосування. Висотоміри малих та середніх висот. Голівки самонаведення ракет. Радіопідірвачі. Доплерівські вимірювачі швидкості і
- 33. * Області застосування НКІ РЛС. Огляд земної та водної поверхні. Огляд повітряного простору. Радіовисотоміри. Метеорологічні РЛС.
- 34. * Області застосування КІ РЛС. Огляд земної та водної поверхні. Огляд повітряного простору. Радіовисотоміри. Метеорологічні РЛС.
- 35. * Питання для самоконтролю Особливості РЛС з різними режимами випромінювання. Особливості РЛС з низькими частотами повторення
- 37. Скачать презентацию
*
РЛС безперервного випромінювання.
Некогерентні імпульсні РЛС.
Когерентні імпульсні РЛС.
Застосування РЛС безперервного та імпульсного
*
РЛС безперервного випромінювання.
Некогерентні імпульсні РЛС.
Когерентні імпульсні РЛС.
Застосування РЛС безперервного та імпульсного
*
Контрольні завдання (РЛС Б І В)
Поясніть, як застосувати функцію та діаграму
*
Контрольні завдання (РЛС Б І В)
Поясніть, як застосувати функцію та діаграму
*
І. РЛС безперервного випромінювання
Переваги безперервного випромінювання:
- максимально можливе заповнення випромінюванням часу
*
І. РЛС безперервного випромінювання
Переваги безперервного випромінювання:
- максимально можливе заповнення випромінюванням часу
*
Особливості радіолокації при безперервному випромінюванні
Особливість умов роботи цих РЛС полягає в
*
Особливості радіолокації при безперервному випромінюванні
Особливість умов роботи цих РЛС полягає в
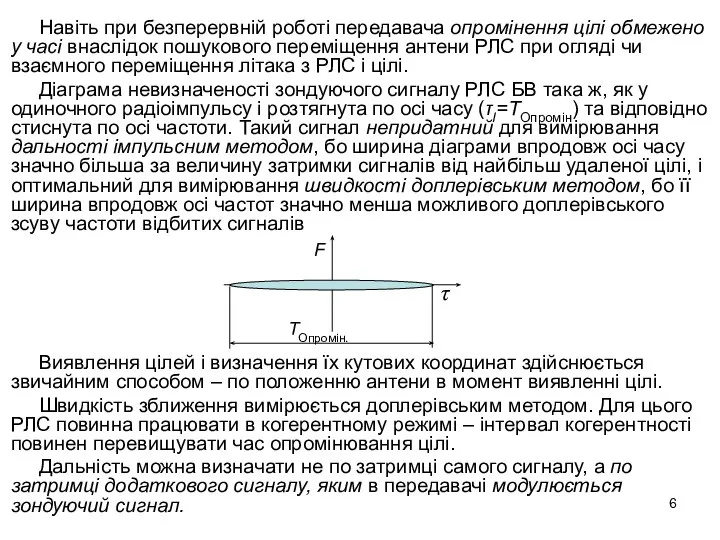
Навіть при безперервній роботі передавача опромінення цілі обмежено у часі внаслідок
Навіть при безперервній роботі передавача опромінення цілі обмежено у часі внаслідок
*
Вимірювання дальності частотним методом
Дальність визначається по затримці сигналу, яким модулюється частота
*
Вимірювання дальності частотним методом
Дальність визначається по затримці сигналу, яким модулюється частота
*
При несиметричній пилкоподібній модуляції ∆F1=FД, ∆F2= γτ+FД і тому
τ=(∆F2-∆F1)/γ, FД=∆F1.
Як і
*
При несиметричній пилкоподібній модуляції ∆F1=FД, ∆F2= γτ+FД і тому
τ=(∆F2-∆F1)/γ, FД=∆F1.
Як і
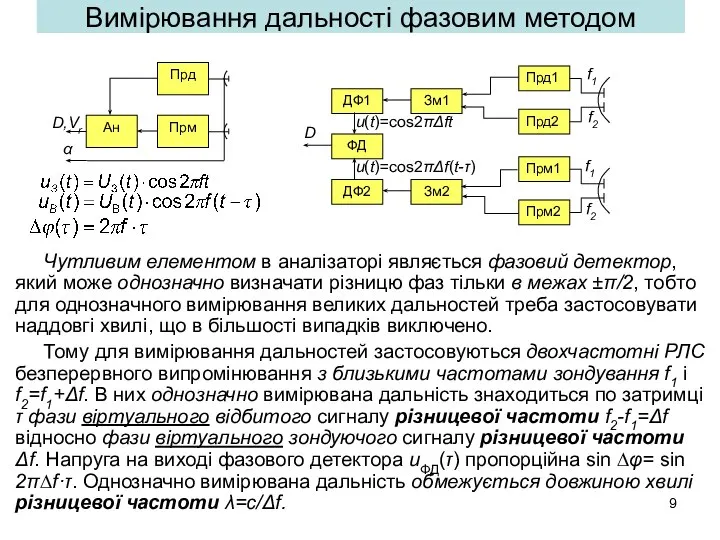
Вимірювання дальності фазовим методом
Чутливим елементом в аналізаторі являється фазовий детектор, який
Вимірювання дальності фазовим методом
Чутливим елементом в аналізаторі являється фазовий детектор, який
*
Особливості та області застосування РЛС БВ
Особливості.
Імпульсна потужність дорівнює середній, малі габарити
*
Особливості та області застосування РЛС БВ
Особливості.
Імпульсна потужність дорівнює середній, малі габарити
*
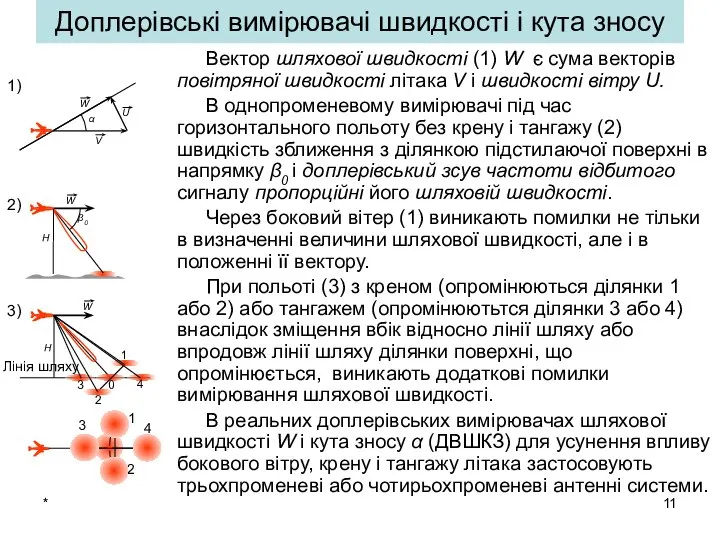
Доплерівські вимірювачі швидкості і кута зносу
Вектор шляхової швидкості (1) W є
*
Доплерівські вимірювачі швидкості і кута зносу
Вектор шляхової швидкості (1) W є
*
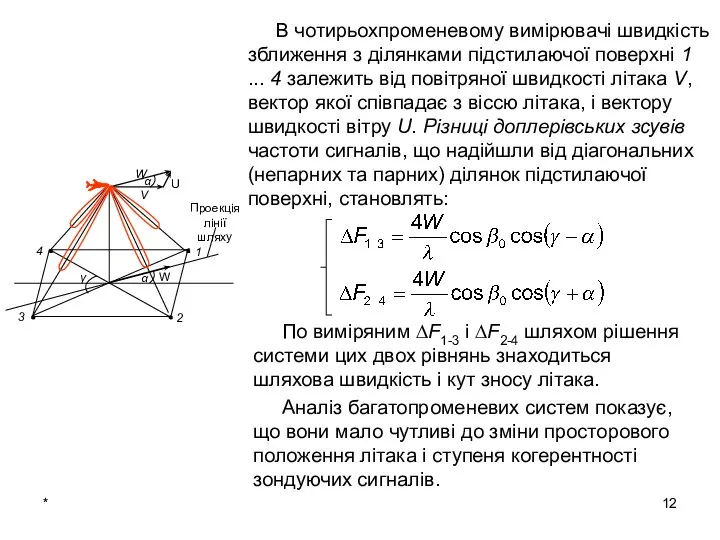
В чотирьохпроменевому вимірювачі швидкість зближення з ділянками підстилаючої поверхні 1 ...
*
В чотирьохпроменевому вимірювачі швидкість зближення з ділянками підстилаючої поверхні 1 ...
*
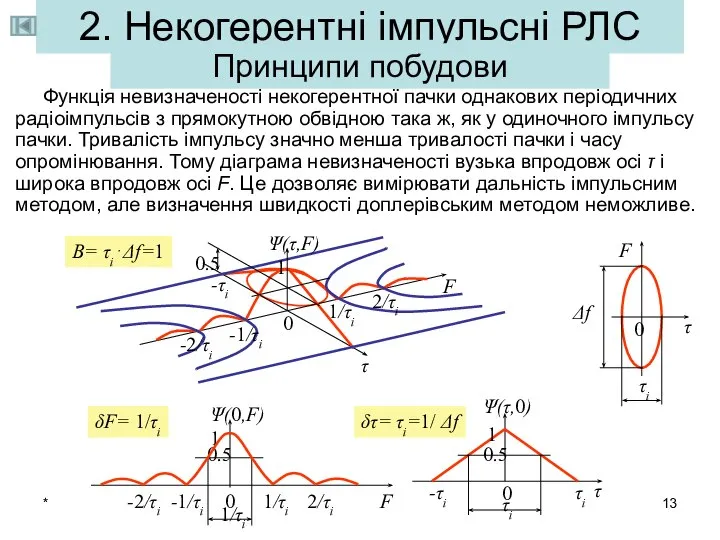
2. Некогерентні імпульсні РЛС
Функція невизначеності некогерентної пачки однакових періодичних радіоімпульсів з
*
2. Некогерентні імпульсні РЛС
Функція невизначеності некогерентної пачки однакових періодичних радіоімпульсів з
*
здійснюється з низькою частотою повторення FП, величина якої вибирається з умови
*
здійснюється з низькою частотою повторення FП, величина якої вибирається з умови
*
Основним недоліком імпульсних РЛС є так звана “мертва зона” тривалістю не
*
Основним недоліком імпульсних РЛС є так звана “мертва зона” тривалістю не
*
Некогерентні імпульсні РЛС прості: вимірюють дві або три координати, мають мертву
*
Некогерентні імпульсні РЛС прості: вимірюють дві або три координати, мають мертву
*
Вобуляція періоду повторення
Вобуляція і девобуляція здійснюються шляхом додаткової затримки частини синхроімпульсів
*
Вобуляція періоду повторення
Вобуляція і девобуляція здійснюються шляхом додаткової затримки частини синхроімпульсів
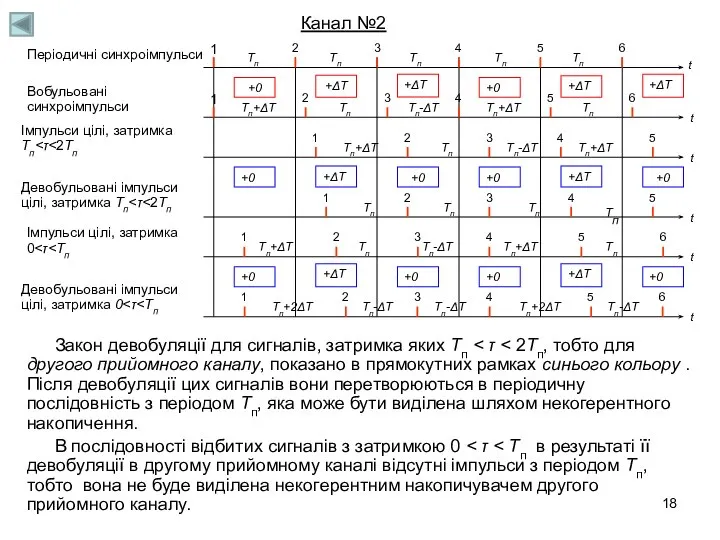
Закон девобуляції для сигналів, затримка яких Тп < τ < 2Тп,
Закон девобуляції для сигналів, затримка яких Тп < τ < 2Тп,
*
Насьогодні ще експлуатується велика кількість РЛС, які по принципам побудови відносяться
*
Насьогодні ще експлуатується велика кількість РЛС, які по принципам побудови відносяться
*
3. Когерентні імпульсні РЛС
В когерентно-імпульсних РЛС (КІ РЛС) завдяки малій ширині
*
3. Когерентні імпульсні РЛС
В когерентно-імпульсних РЛС (КІ РЛС) завдяки малій ширині
*
Когерентний режим роботи забезпечується формуванням в синтезаторі частот (СЧ) пачки зондуючих
*
Когерентний режим роботи забезпечується формуванням в синтезаторі частот (СЧ) пачки зондуючих
*
Когерентні імпульсні РЛС (КІ РЛС) мають кращі характеристики, ніж некогерентні, тому
*
Когерентні імпульсні РЛС (КІ РЛС) мають кращі характеристики, ніж некогерентні, тому
Селекція рухомих цілей
Метод черезперіодної компенсації (ЧПК)
Радіоімпульси цілей проміжної частоти з доплерівськими
Селекція рухомих цілей
Метод черезперіодної компенсації (ЧПК)
Радіоімпульси цілей проміжної частоти з доплерівськими
*
Якщо FД≠0 і FД≠k⋅FП (а), то сусідні відліки мають різну величину,
*
Якщо FД≠0 і FД≠k⋅FП (а), то сусідні відліки мають різну величину,
*
Фільтровий метод СРЦ
Перешкоди створюються сигналами підстилаючої поверхні, які надходять по нижнім
*
Фільтровий метод СРЦ
Перешкоди створюються сигналами підстилаючої поверхні, які надходять по нижнім
*
В КІ РЛС період повторення зондуючих сигналів обирається за умови однозначного
*
В КІ РЛС період повторення зондуючих сигналів обирається за умови однозначного
*
Особливості та області застосування
В КІ РЛС частоти повторення FП, як і
*
Особливості та області застосування
В КІ РЛС частоти повторення FП, як і
*
“Сліпі” швидкості мають місце, коли спектральні складові відбитих сигналів SВ=(f) (коричневого
*
“Сліпі” швидкості мають місце, коли спектральні складові відбитих сигналів SВ=(f) (коричневого
*
Для усунення сліпих швидкостей теж в кожному напрямку здійснюється зондування на
*
Для усунення сліпих швидкостей теж в кожному напрямку здійснюється зондування на
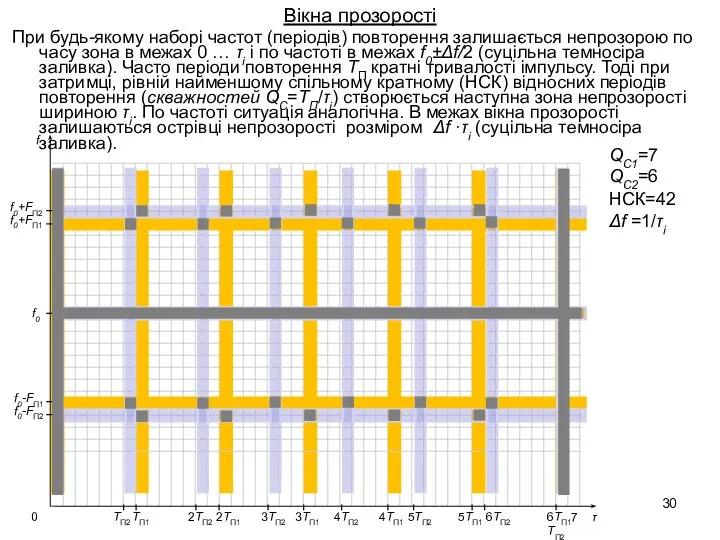
Вікна прозорості
При будь-якому наборі частот (періодів) повторення залишається непрозорою по часу
Вікна прозорості
При будь-якому наборі частот (періодів) повторення залишається непрозорою по часу
*
4. Застосування РЛС безперервного та імпульсного випромінювання
Із співставлення діаграм невизначеності однакового
*
4. Застосування РЛС безперервного та імпульсного випромінювання
Із співставлення діаграм невизначеності однакового
*
Області застосування.
Висотоміри малих та середніх висот.
Голівки самонаведення ракет.
Радіопідірвачі.
Доплерівські вимірювачі швидкості і
*
Області застосування.
Висотоміри малих та середніх висот.
Голівки самонаведення ракет.
Радіопідірвачі.
Доплерівські вимірювачі швидкості і
*
Області застосування НКІ РЛС.
Огляд земної та водної поверхні.
Огляд повітряного простору.
Радіовисотоміри.
Метеорологічні РЛС.
Системи
*
Області застосування НКІ РЛС.
Огляд земної та водної поверхні.
Огляд повітряного простору.
Радіовисотоміри.
Метеорологічні РЛС.
Системи
*
Області застосування КІ РЛС.
Огляд земної та водної поверхні.
Огляд повітряного простору.
Радіовисотоміри.
Метеорологічні РЛС.
Доплерівські
*
Області застосування КІ РЛС.
Огляд земної та водної поверхні.
Огляд повітряного простору.
Радіовисотоміри.
Метеорологічні РЛС.
Доплерівські
*
Питання для самоконтролю
Особливості РЛС з різними режимами випромінювання.
Особливості РЛС з
*
Питання для самоконтролю
Особливості РЛС з різними режимами випромінювання.
Особливості РЛС з
 Тормозной путь
Тормозной путь Товарное производство теор стоимости
Товарное производство теор стоимости Основные гипотезы линейной теории упругости
Основные гипотезы линейной теории упругости Инфляция
Инфляция  Разработка компьютерного календаря сбора лекарственных растений и игровой программы
Разработка компьютерного календаря сбора лекарственных растений и игровой программы Индуизм, синтоизм
Индуизм, синтоизм Проектирование промышленных зданий. Лекция 1
Проектирование промышленных зданий. Лекция 1 Электроснабжение и электрооборудование модульной котельной
Электроснабжение и электрооборудование модульной котельной Функции государства
Функции государства Типы, переменные, управляющие инструкции. Массивы. (Тема 2.5)
Типы, переменные, управляющие инструкции. Массивы. (Тема 2.5)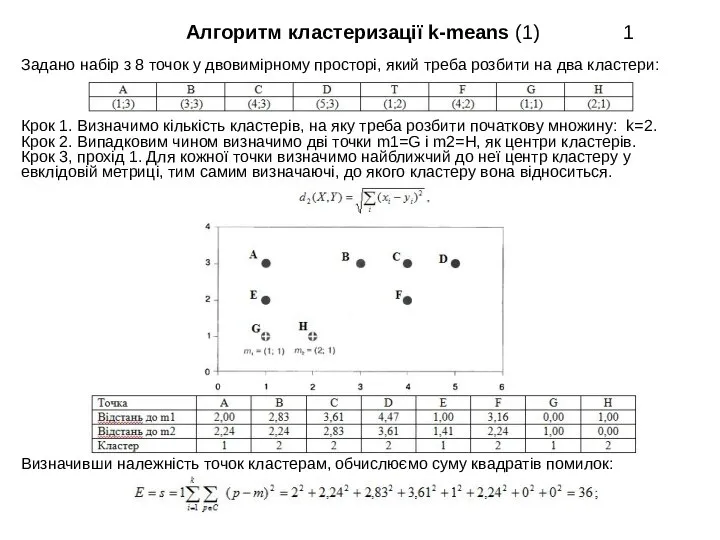 Алгоритм кластеризації k-means (1)
Алгоритм кластеризації k-means (1) Стив Маккарри — американский фотожурналист
Стив Маккарри — американский фотожурналист дескрипторы переключение задач
дескрипторы переключение задач Разминка!!! Подготовили: Журавлева Н. С., Савенкова А. А. Группа 1307
Разминка!!! Подготовили: Журавлева Н. С., Савенкова А. А. Группа 1307 Оператор условного перехода в Паскаль АВС
Оператор условного перехода в Паскаль АВС Канал DANIX
Канал DANIX Проект : «Сохраним красоту природы!» Проект : «Сохраним красоту природы!» ученицы 3 А класса ш
Проект : «Сохраним красоту природы!» Проект : «Сохраним красоту природы!» ученицы 3 А класса ш АМИКСИН® IC (ТИЛОРОН)
АМИКСИН® IC (ТИЛОРОН) Отчет по учебной практике. Радарный уровнемер Saab TankRadar RTG 3920
Отчет по учебной практике. Радарный уровнемер Saab TankRadar RTG 3920 Россия - родина моя (1 класс) - презентация_
Россия - родина моя (1 класс) - презентация_ IТ Образование для специалистов всех уровней!
IТ Образование для специалистов всех уровней! STL Числовые пределы
STL Числовые пределы Презентация "Целевые рынки" - скачать презентации по Экономике
Презентация "Целевые рынки" - скачать презентации по Экономике Технико-экономическая эффективность автоматизации технологических процессов
Технико-экономическая эффективность автоматизации технологических процессов Рождество – это великий христианский праздник, установленный в память Иисуса Христа
Рождество – это великий христианский праздник, установленный в память Иисуса Христа Среда централизованного управления данными
Среда централизованного управления данными КЗ «Маріупольська загальноосвітня школа І – ІІІ ступенів № 24 Маріупольської міської ради Донецької області» Місюри Те
КЗ «Маріупольська загальноосвітня школа І – ІІІ ступенів № 24 Маріупольської міської ради Донецької області» Місюри Те Глава 4. Экономика государства 26. Деньги
Глава 4. Экономика государства 26. Деньги