- Т7 ТО РЛ.ppt

Содержание
- 2. * Виявлення цілей. Розділення цілей. Оцінка параметрів радіолокаційних сигналів. Вторинна обробка радіолокаційної інформації. Навчальна та виховна
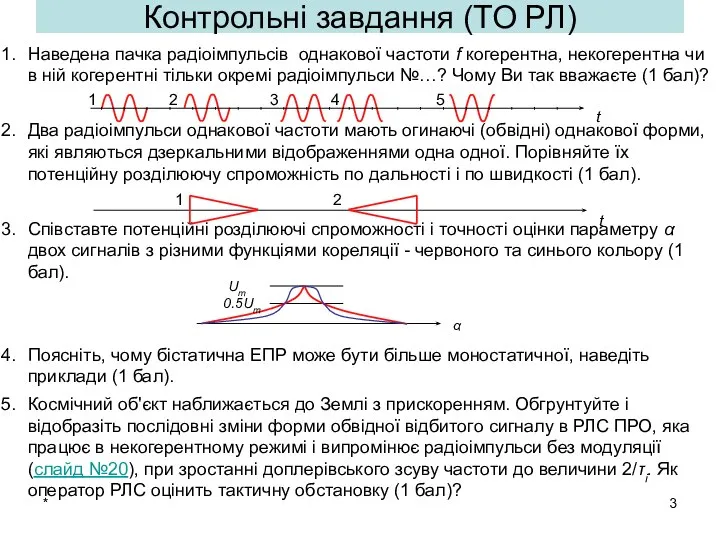
- 3. * Наведена пачка радіоімпульсів однакової частоти f когерентна, некогерентна чи в ній когерентні тільки окремі радіоімпульси
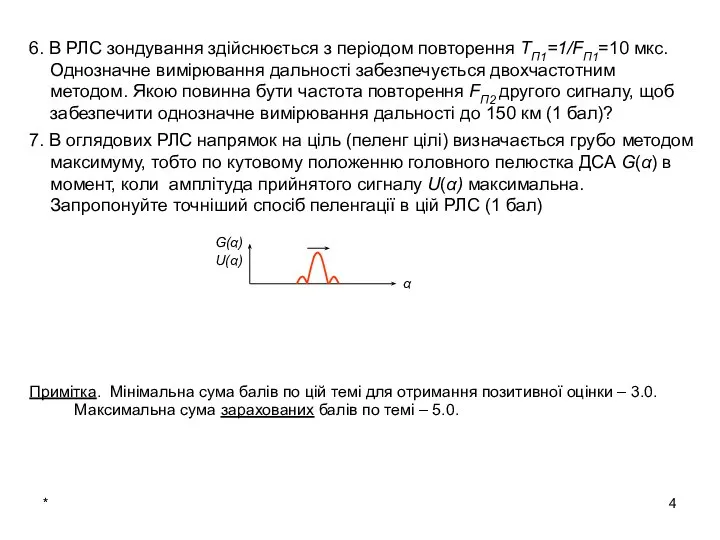
- 4. * 6. В РЛС зондування здійснюється з періодом повторення ТП1=1/FП1=10 мкс. Однозначне вимірювання дальності забезпечується двохчастотним
- 5. 1. Виявлення цілей Радіолокаційні характеристики цілей Основною характеристикою радіолокаційної цілі являється її ефективна площа розсіювання (ЕПР):
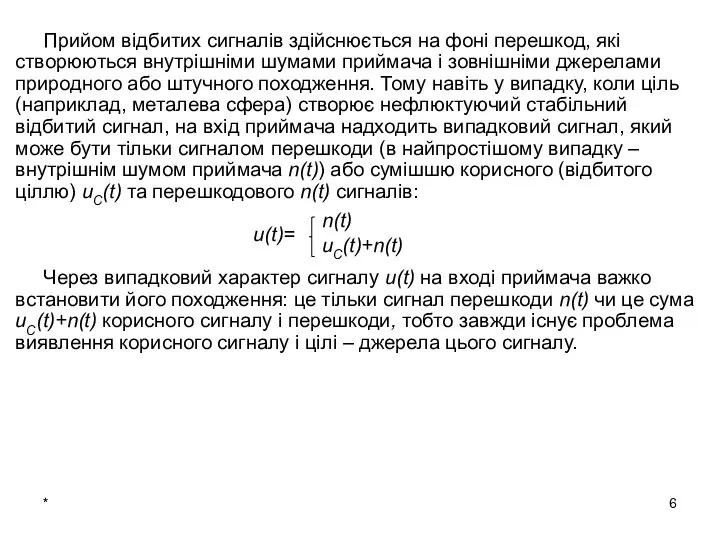
- 6. * Прийом відбитих сигналів здійснюється на фоні перешкод, які створюються внутрішніми шумами приймача і зовнішніми джерелами
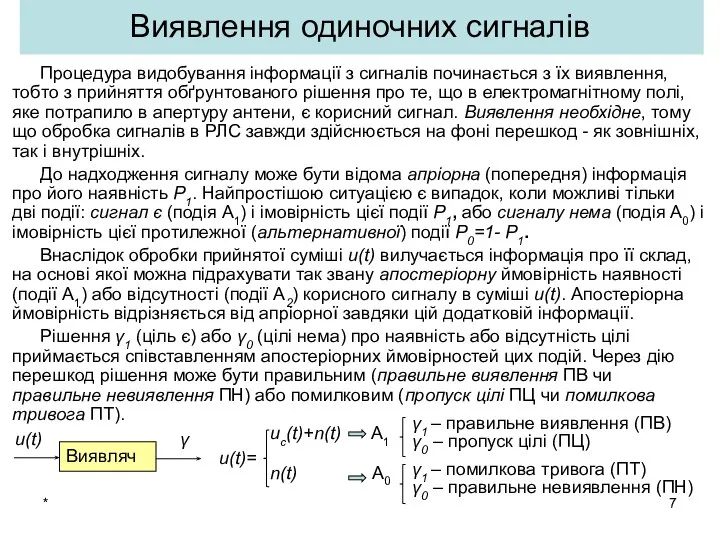
- 7. * 1. Виявлення цілей Процедура видобування інформації з сигналів починається з їх виявлення, тобто з прийняття
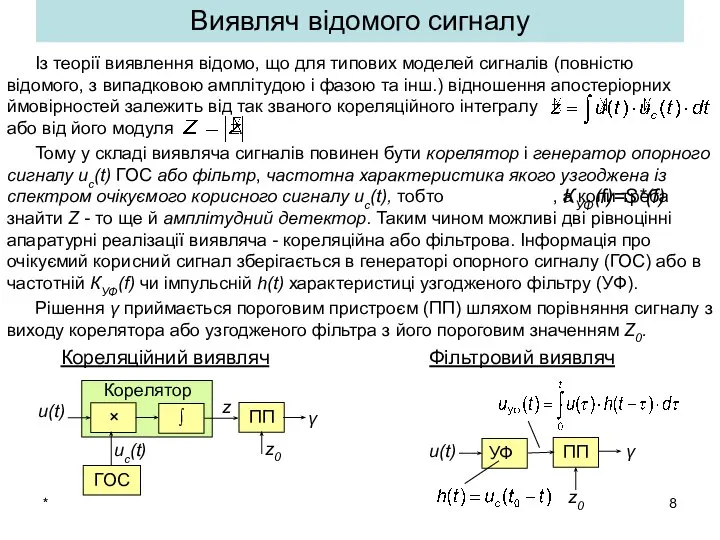
- 8. * Із теорії виявлення відомо, що для типових моделей сигналів (повністю відомого, з випадковою амплітудою і
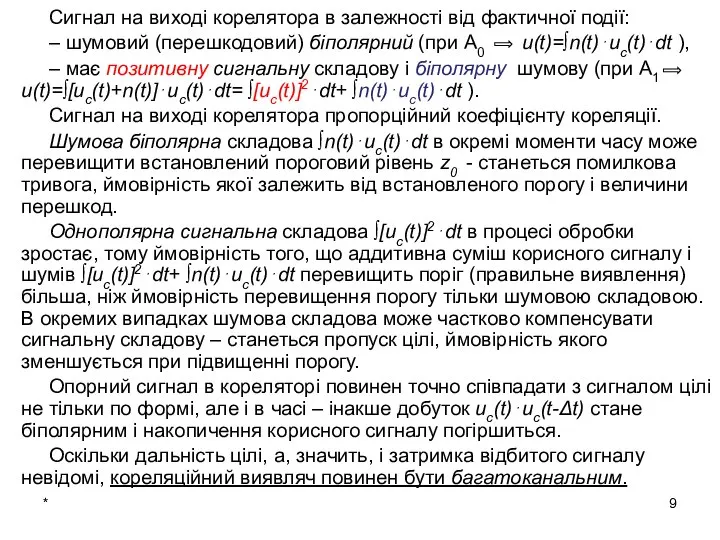
- 9. * Сигнал на виході корелятора в залежності від фактичної події: – шумовий (перешкодовий) біполярний (при А0
- 10. Сигнал на виході узгодженого фільтру з імпульсною характеристикою : при t=t0 співпадає з кореляційним інтегралом, тобто
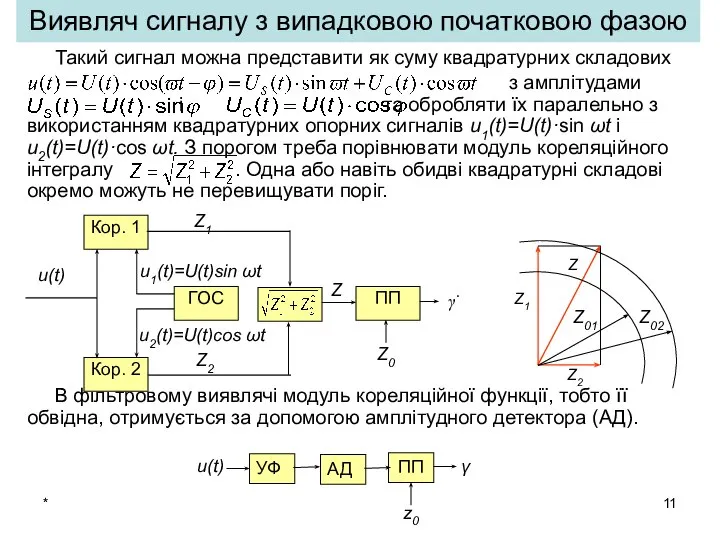
- 11. * Виявляч сигналу з випадковою початковою фазою Такий сигнал можна представити як суму квадратурних складових з
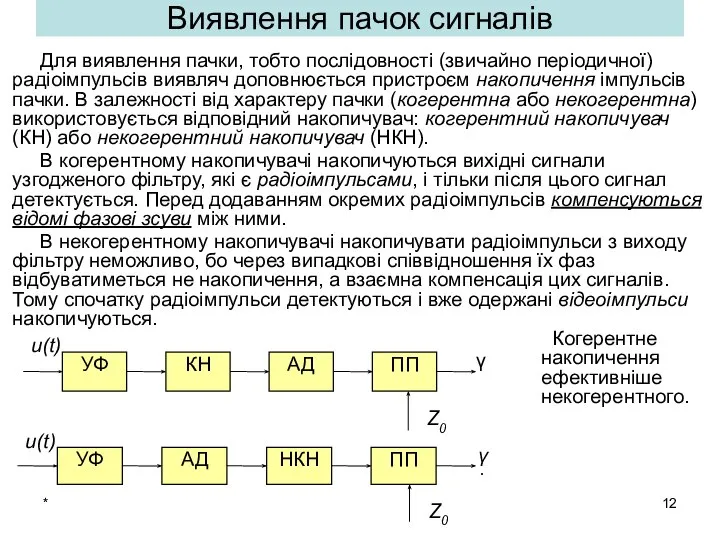
- 12. * Виявлення пачок сигналів Для виявлення пачки, тобто послідовності (звичайно періодичної) радіоімпульсів виявляч доповнюється пристроєм накопичення
- 13. * Висновок Основний недолік кореляційного варіанту виявляча - громіздкість через необхідність мати велику кількість паралельно працюючих
- 14. * Показники якості виявлення Якість виявлення звичайно оцінюється ймовірностями помилкової тривоги РПТ і правильного виявлення РПВ,
- 15. * 2. Розділення цілей Здібність РЛС роздільно спостерігати декілька цілей кількісно характеризується її розділюючою спроможністю, яка
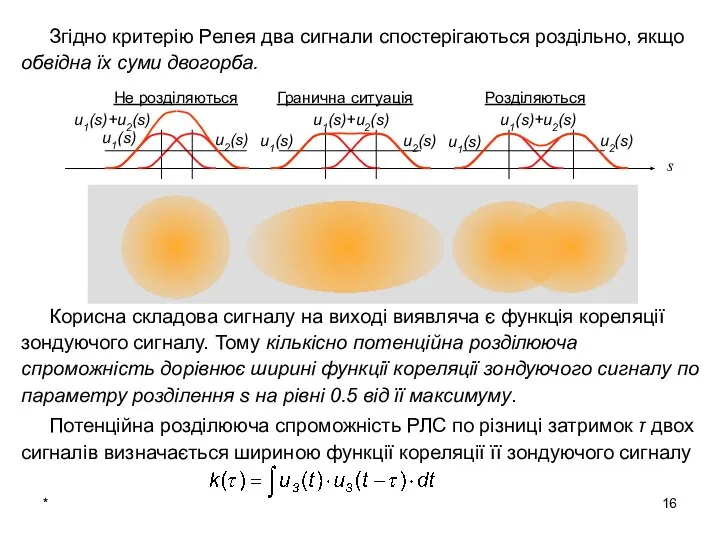
- 16. * Згідно критерію Релея два сигнали спостерігаються роздільно, якщо обвідна їх суми двогорба. Корисна складова сигналу
- 17. * Розділююча спроможність по дальності (по часу) Радіоімпульс з прямокутною обвідною без модуляції тривалістю τі (простий
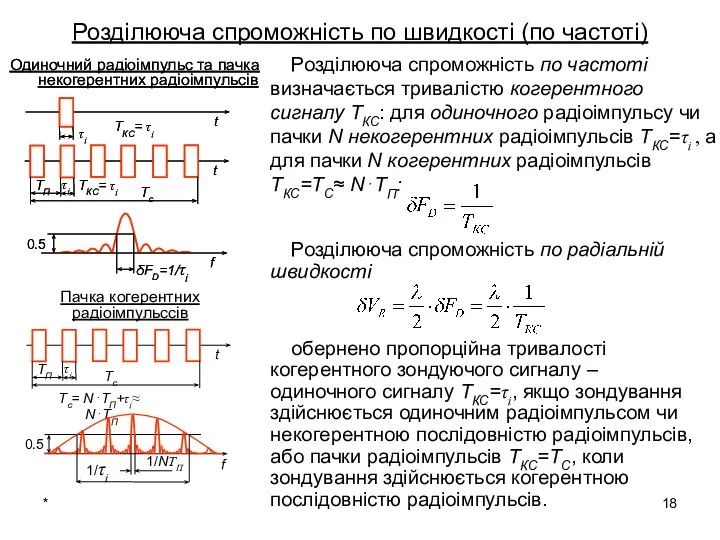
- 18. * Розділююча спроможність по швидкості (по частоті) Розділююча спроможність по радіальній швидкості обернено пропорційна тривалості когерентного
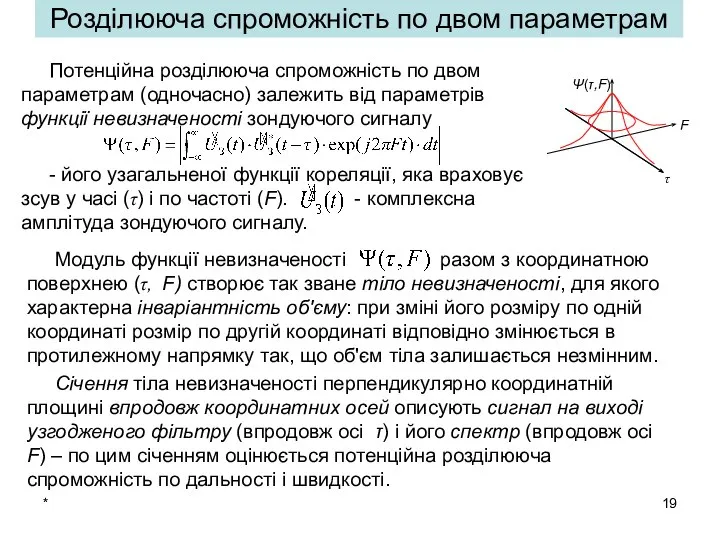
- 19. * Розділююча спроможність по двом параметрам Потенційна розділююча спроможність по двом параметрам (одночасно) залежить від параметрів
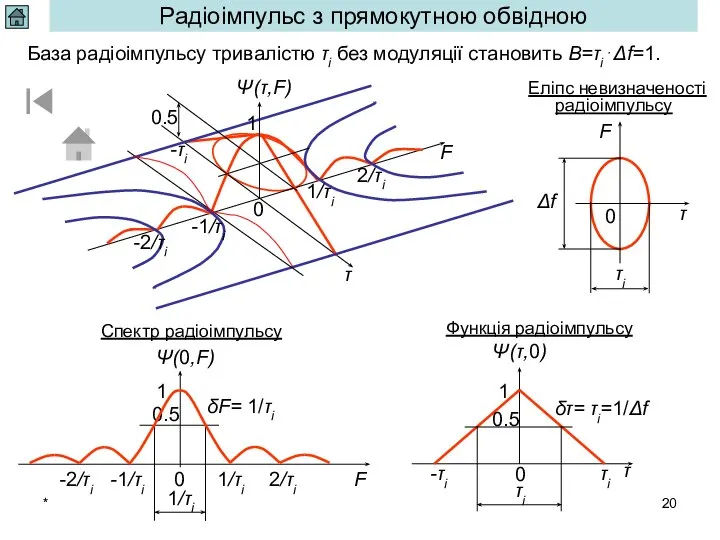
- 20. * Радіоімпульс з прямокутною обвідною База радіоімпульсу тривалістю τі без модуляції становить B=τi⋅Δf=1.
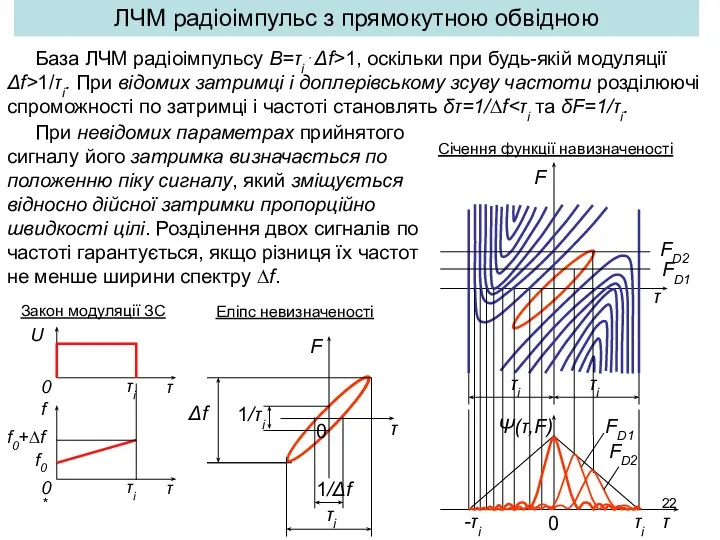
- 21. * Січення функції невизначеності горизонтальною площиною на рівні 0.5 від максимуму зветься еліпсом (діаграмою) невизначеності, розміри
- 22. * ЛЧМ радіоімпульс з прямокутною обвідною База ЛЧМ радіоімпульсу B=τi⋅Δf>1, оскільки при будь-якій модуляції Δf>1/τi. При
- 23. * Пачка періодичних когерентних радіоімпульсів Тс= (N-1)⋅ТП+τi≈ N⋅ТП 4),5) 5)
- 24. * Пачка радіоімпульсів (1) когерентна, її фазова структура відома. Внаслідок оптимальної обробки кожного радіоімпульсу пачки узгодженим
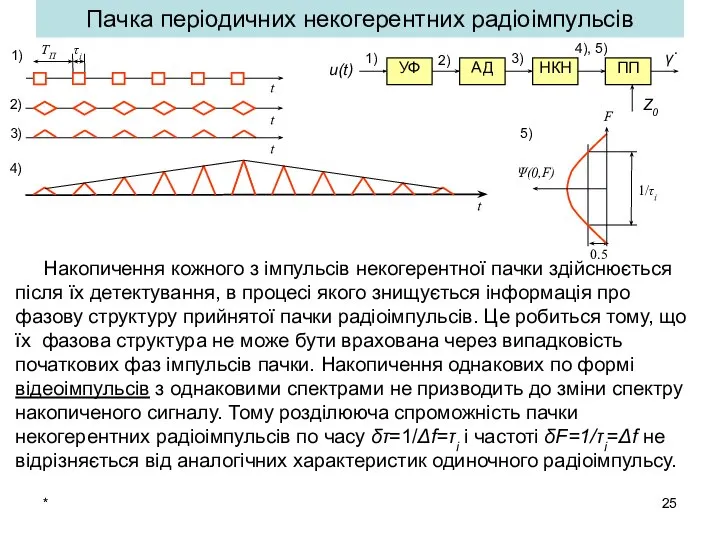
- 25. * Накопичення кожного з імпульсів некогерентної пачки здійснюється після їх детектування, в процесі якого знищується інформація
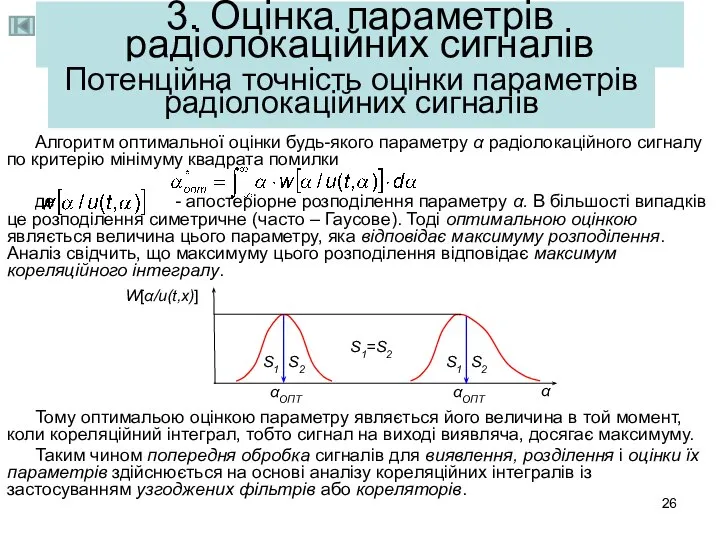
- 26. 3. Оцінка параметрів радіолокаційних сигналів Алгоритм оптимальної оцінки будь-якого параметру α радіолокаційного сигналу по критерію мінімуму
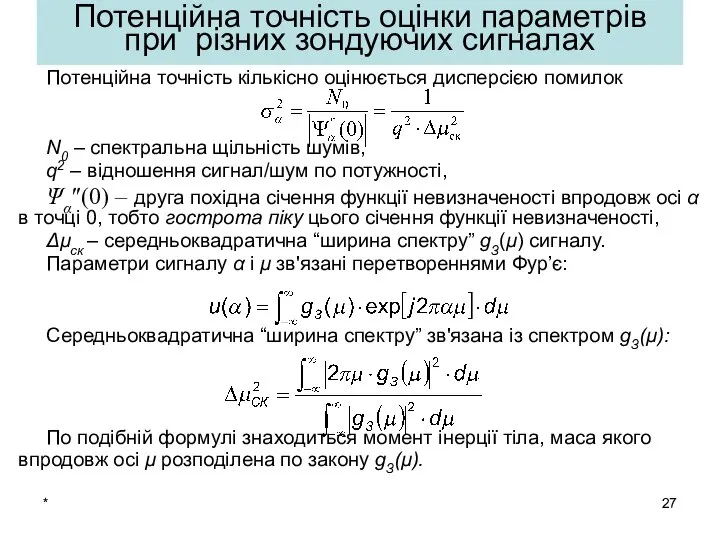
- 27. * Потенційна точність кількісно оцінюється дисперсією помилок N0 – спектральна щільність шумів, q2 – відношення сигнал/шум
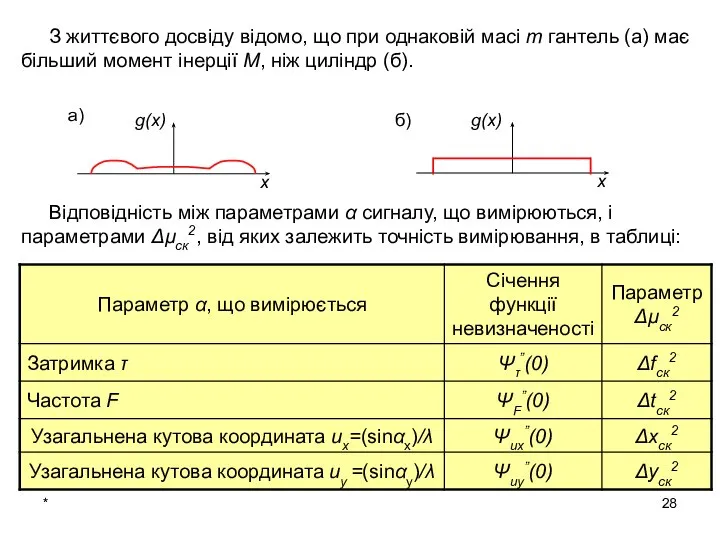
- 28. * З життєвого досвіду відомо, що при однаковій масі т гантель (а) має більший момент інерції
- 29. * Найбільшу точність визначення дальності забезпечує двохчастотний сигнал з максимально рознесеними частотами, радіальної швидкості – двохімпульсний
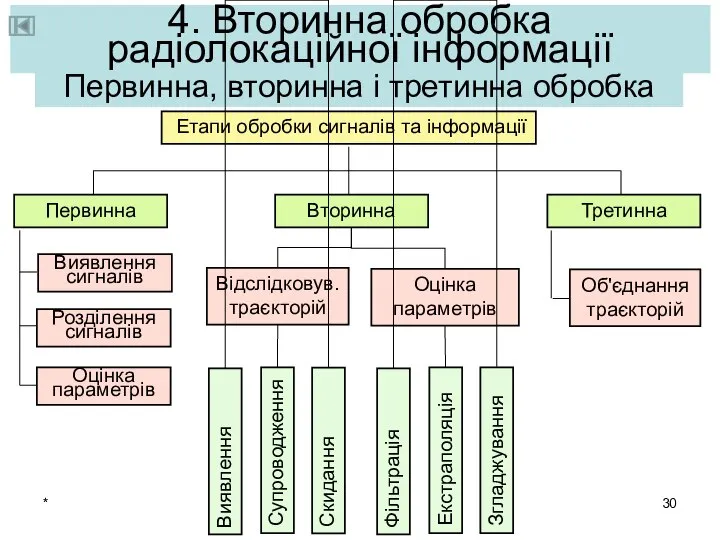
- 30. * 4. Вторинна обробка радіолокаційної інформації Первинна, вторинна і третинна обробка
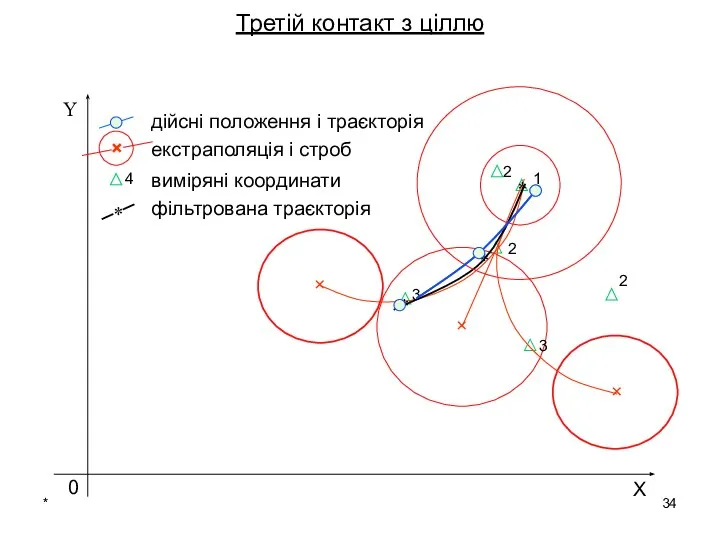
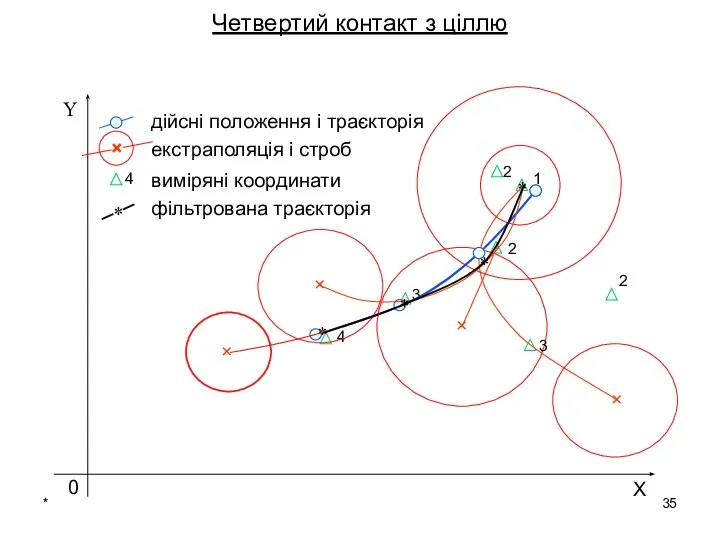
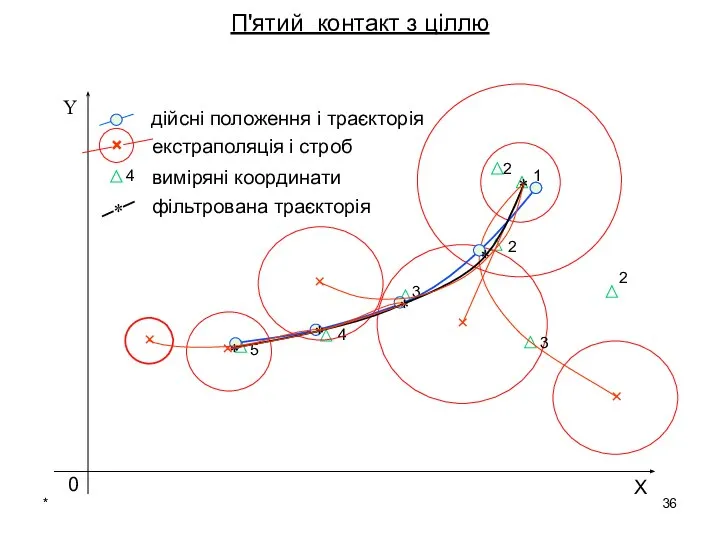
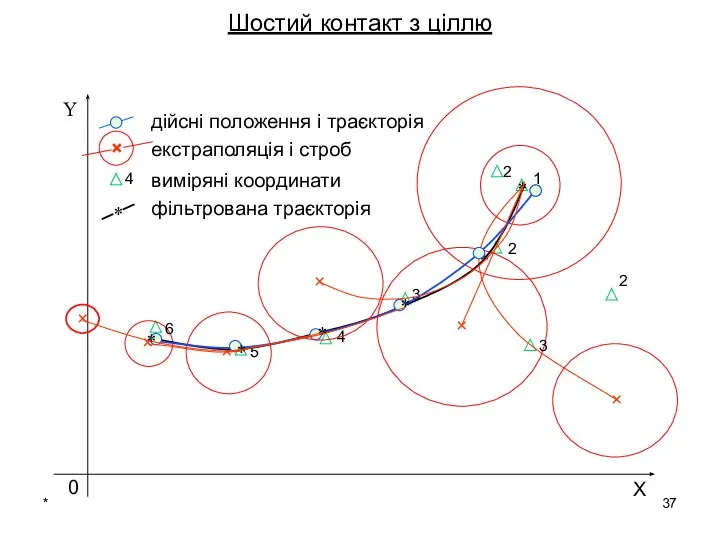
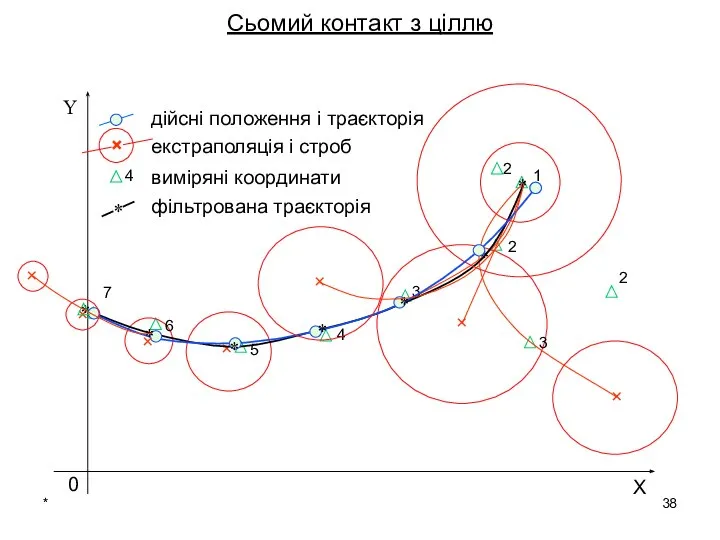
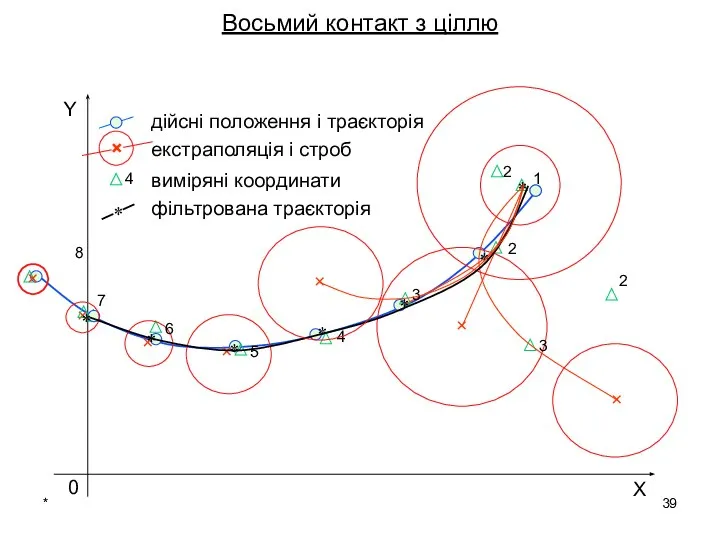
- 31. * Вторинна обробка інформації по сукупності послідовних оцінок координат цілі при первинній обробці послідовності прийнятих сигналів
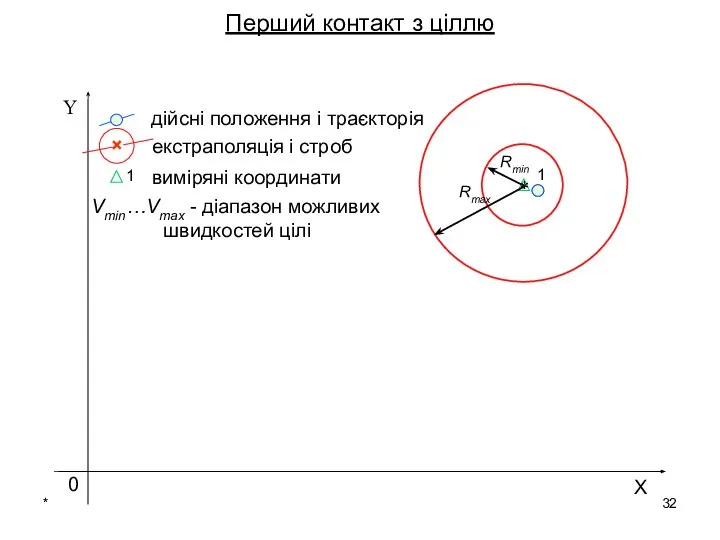
- 32. * Перший контакт з ціллю
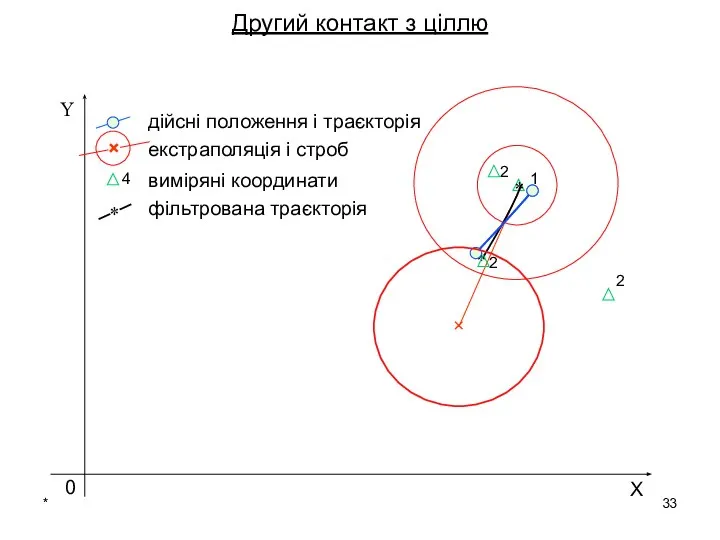
- 33. * Другий контакт з ціллю
- 34. * Третій контакт з ціллю
- 35. * Четвертий контакт з ціллю
- 36. * П'ятий контакт з ціллю
- 37. * Шостий контакт з ціллю
- 38. * Сьомий контакт з ціллю
- 39. * Восьмий контакт з ціллю
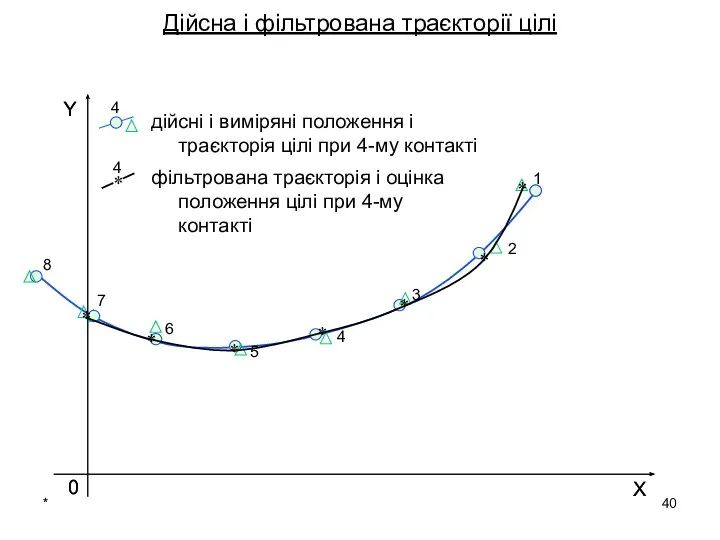
- 40. * Дійсна і фільтрована траєкторії цілі
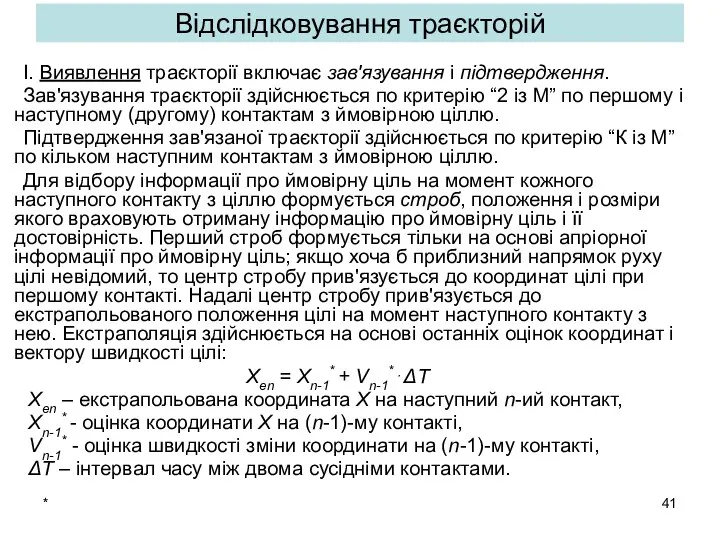
- 41. * Відслідковування траєкторій І. Виявлення траєкторії включає зав'язування і підтвердження. Зав'язування траєкторії здійснюється по критерію “2
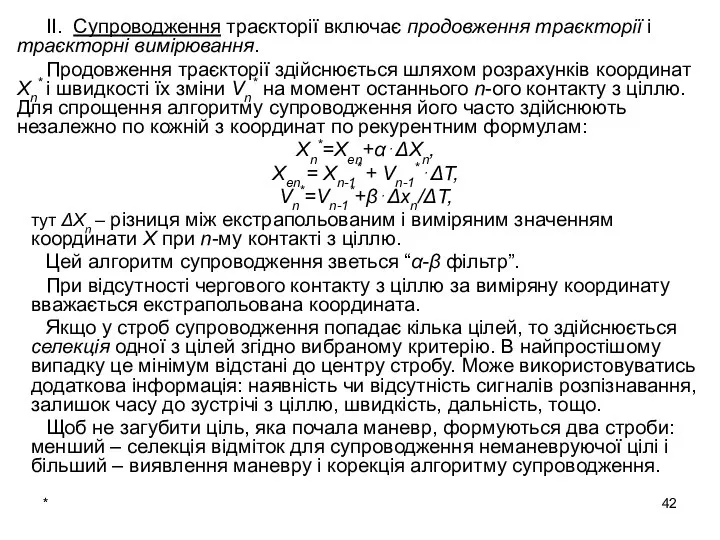
- 42. * ІІ. Супроводження траєкторії включає продовження траєкторії і траєкторні вимірювання. Продовження траєкторії здійснюється шляхом розрахунків координат
- 43. * ІІІ. Скидання траєкторії. Скидання траєкторії з супроводження звичайно здійснюється по правилу “N із N” –
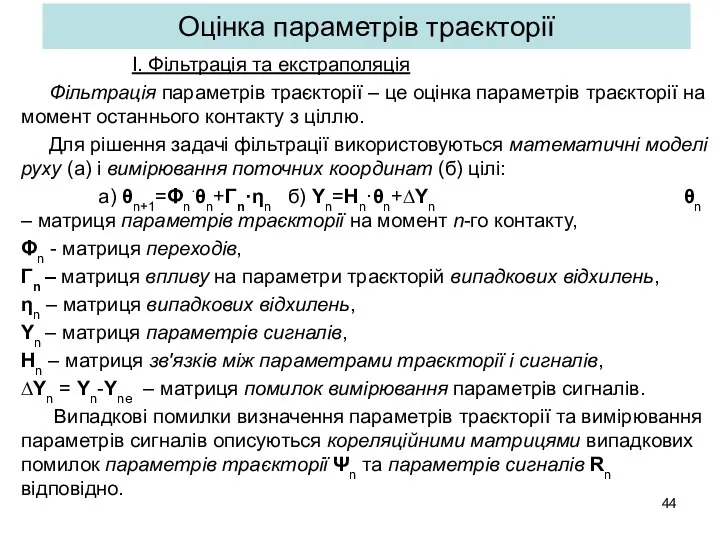
- 44. Оцінка параметрів траєкторії І. Фільтрація та екстраполяція Фільтрація параметрів траєкторії – це оцінка параметрів траєкторії на
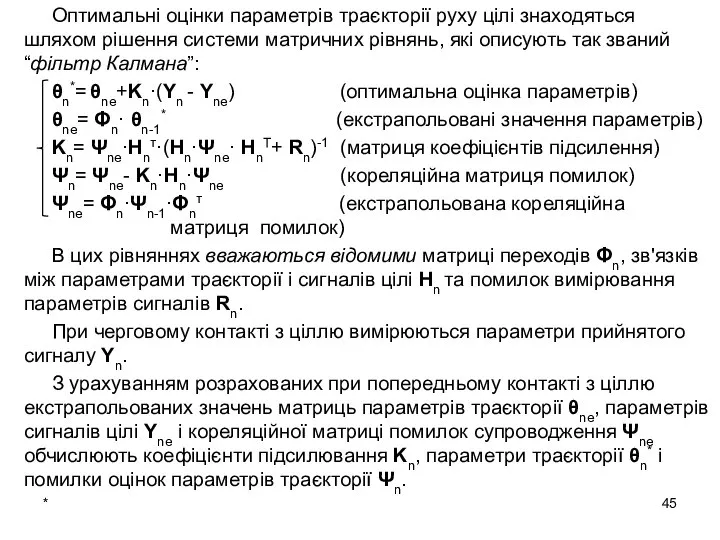
- 45. * Оптимальні оцінки параметрів траєкторії руху цілі знаходяться шляхом рішення системи матричних рівнянь, які описують так
- 46. * Щоб зменшити навантаження на обчислювач ціною зростання помилок спрощують задачу: - впродовж всього часу супроводження
- 47. * ІІ. Згладжування Згладжування – це оцінка параметрів траєкторії на будь-який момент часу всередині інтервалу спостереження
- 48. * Питання для самоконтролю Який фільтр являється узгодженим? Переваги і недоліки фільтрового виявляча. Переваги і недоліки
- 50. Скачать презентацию
*
Виявлення цілей.
Розділення цілей.
Оцінка параметрів радіолокаційних сигналів.
Вторинна обробка радіолокаційної інформації.
Навчальна та виховна
*
Виявлення цілей.
Розділення цілей.
Оцінка параметрів радіолокаційних сигналів.
Вторинна обробка радіолокаційної інформації.
Навчальна та виховна
*
Наведена пачка радіоімпульсів однакової частоти f когерентна, некогерентна чи в ній
*
Наведена пачка радіоімпульсів однакової частоти f когерентна, некогерентна чи в ній
*
6. В РЛС зондування здійснюється з періодом повторення ТП1=1/FП1=10 мкс. Однозначне
*
6. В РЛС зондування здійснюється з періодом повторення ТП1=1/FП1=10 мкс. Однозначне
1. Виявлення цілей
Радіолокаційні характеристики цілей
Основною характеристикою радіолокаційної цілі являється її ефективна
1. Виявлення цілей
Радіолокаційні характеристики цілей
Основною характеристикою радіолокаційної цілі являється її ефективна
*
Прийом відбитих сигналів здійснюється на фоні перешкод, які створюються внутрішніми шумами
*
Прийом відбитих сигналів здійснюється на фоні перешкод, які створюються внутрішніми шумами
*
1. Виявлення цілей
Процедура видобування інформації з сигналів починається з їх виявлення,
*
1. Виявлення цілей
Процедура видобування інформації з сигналів починається з їх виявлення,
*
Із теорії виявлення відомо, що для типових моделей сигналів (повністю відомого,
*
Із теорії виявлення відомо, що для типових моделей сигналів (повністю відомого,
*
Сигнал на виході корелятора в залежності від фактичної події:
– шумовий (перешкодовий)
*
Сигнал на виході корелятора в залежності від фактичної події:
– шумовий (перешкодовий)
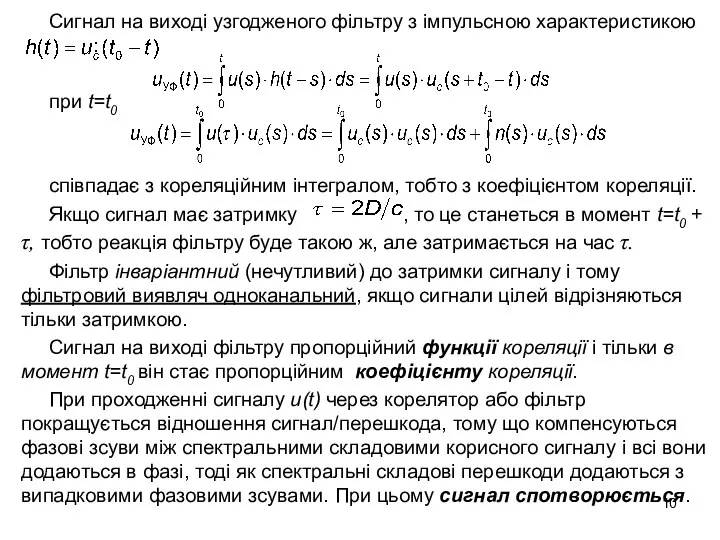
Сигнал на виході узгодженого фільтру з імпульсною характеристикою :
при t=t0
співпадає з
Сигнал на виході узгодженого фільтру з імпульсною характеристикою :
при t=t0
співпадає з
*
Виявляч сигналу з випадковою початковою фазою
Такий сигнал можна представити як суму
*
Виявляч сигналу з випадковою початковою фазою
Такий сигнал можна представити як суму
*
Виявлення пачок сигналів
Для виявлення пачки, тобто послідовності (звичайно періодичної) радіоімпульсів виявляч
*
Виявлення пачок сигналів
Для виявлення пачки, тобто послідовності (звичайно періодичної) радіоімпульсів виявляч
*
Висновок
Основний недолік кореляційного варіанту виявляча - громіздкість через необхідність мати велику
*
Висновок
Основний недолік кореляційного варіанту виявляча - громіздкість через необхідність мати велику
*
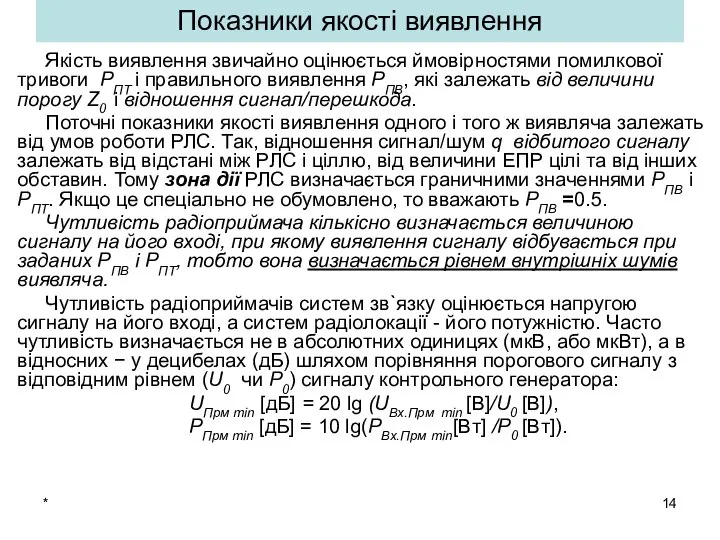
Показники якості виявлення
Якість виявлення звичайно оцінюється ймовірностями помилкової тривоги РПТ і
*
Показники якості виявлення
Якість виявлення звичайно оцінюється ймовірностями помилкової тривоги РПТ і
*
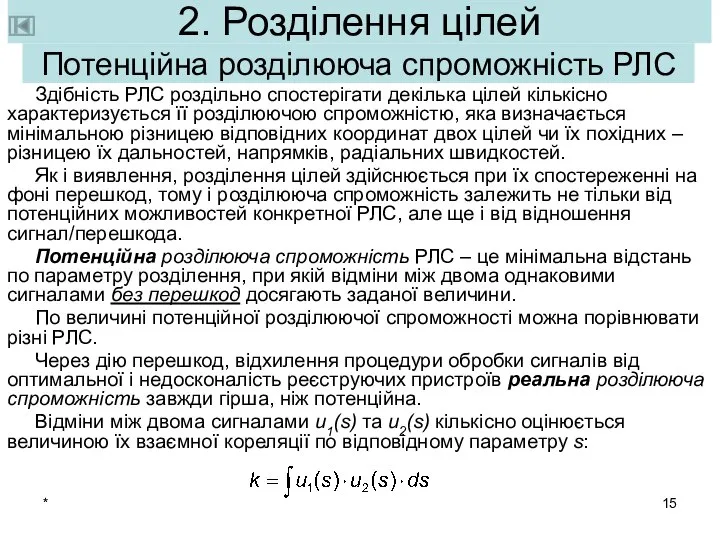
2. Розділення цілей
Здібність РЛС роздільно спостерігати декілька цілей кількісно характеризується її
*
2. Розділення цілей
Здібність РЛС роздільно спостерігати декілька цілей кількісно характеризується її
*
Згідно критерію Релея два сигнали спостерігаються роздільно, якщо обвідна їх суми
*
Згідно критерію Релея два сигнали спостерігаються роздільно, якщо обвідна їх суми
*
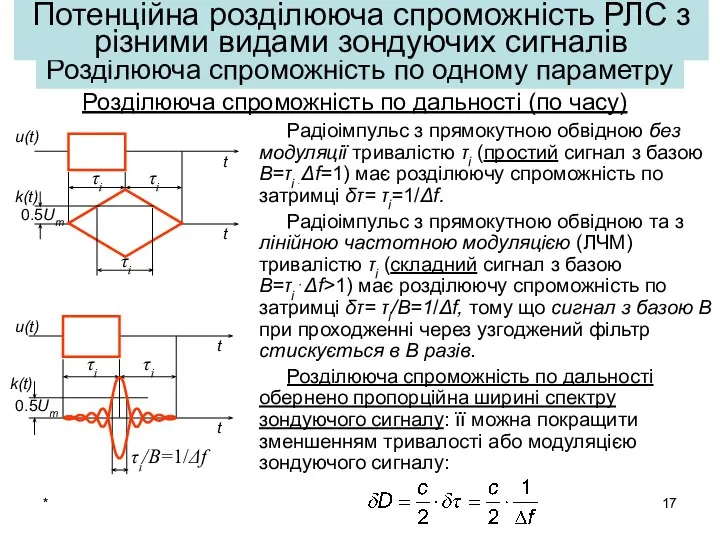
Розділююча спроможність по дальності (по часу)
Радіоімпульс з прямокутною обвідною без модуляції
*
Розділююча спроможність по дальності (по часу)
Радіоімпульс з прямокутною обвідною без модуляції
*
Розділююча спроможність по швидкості (по частоті)
Розділююча спроможність по радіальній швидкості
обернено
*
Розділююча спроможність по швидкості (по частоті)
Розділююча спроможність по радіальній швидкості
обернено
*
Розділююча спроможність по двом параметрам
Потенційна розділююча спроможність по двом параметрам (одночасно)
*
Розділююча спроможність по двом параметрам
Потенційна розділююча спроможність по двом параметрам (одночасно)
*
Радіоімпульс з прямокутною обвідною
База радіоімпульсу тривалістю τі без модуляції становить
*
Радіоімпульс з прямокутною обвідною
База радіоімпульсу тривалістю τі без модуляції становить
*
Січення функції невизначеності горизонтальною площиною на рівні 0.5 від максимуму зветься
*
Січення функції невизначеності горизонтальною площиною на рівні 0.5 від максимуму зветься
*
ЛЧМ радіоімпульс з прямокутною обвідною
База ЛЧМ радіоімпульсу B=τi⋅Δf>1, оскільки при
*
ЛЧМ радіоімпульс з прямокутною обвідною
База ЛЧМ радіоімпульсу B=τi⋅Δf>1, оскільки при
*
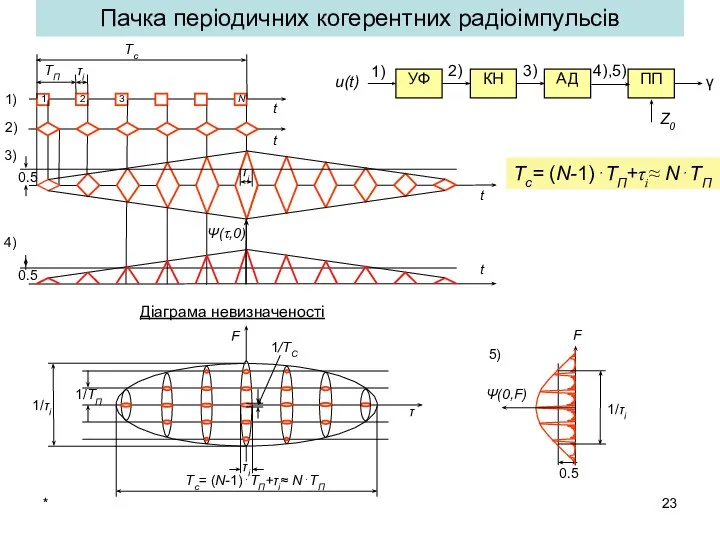
Пачка періодичних когерентних радіоімпульсів
Тс= (N-1)⋅ТП+τi≈ N⋅ТП
4),5)
5)
*
Пачка періодичних когерентних радіоімпульсів
Тс= (N-1)⋅ТП+τi≈ N⋅ТП
4),5)
5)
*
Пачка радіоімпульсів (1) когерентна, її фазова структура відома. Внаслідок оптимальної обробки
*
Пачка радіоімпульсів (1) когерентна, її фазова структура відома. Внаслідок оптимальної обробки
*
Накопичення кожного з імпульсів некогерентної пачки здійснюється після їх детектування, в
*
Накопичення кожного з імпульсів некогерентної пачки здійснюється після їх детектування, в
3. Оцінка параметрів радіолокаційних сигналів
Алгоритм оптимальної оцінки будь-якого параметру α радіолокаційного
3. Оцінка параметрів радіолокаційних сигналів
Алгоритм оптимальної оцінки будь-якого параметру α радіолокаційного
*
Потенційна точність кількісно оцінюється дисперсією помилок
N0 – спектральна щільність шумів,
q2
*
Потенційна точність кількісно оцінюється дисперсією помилок
N0 – спектральна щільність шумів,
q2
*
З життєвого досвіду відомо, що при однаковій масі т гантель (а)
*
З життєвого досвіду відомо, що при однаковій масі т гантель (а)
*
Найбільшу точність визначення дальності забезпечує двохчастотний сигнал з максимально рознесеними частотами,
*
Найбільшу точність визначення дальності забезпечує двохчастотний сигнал з максимально рознесеними частотами,
*
4. Вторинна обробка радіолокаційної інформації
Первинна, вторинна і третинна обробка
*
4. Вторинна обробка радіолокаційної інформації
Первинна, вторинна і третинна обробка
*
Вторинна обробка інформації по сукупності послідовних оцінок координат цілі при первинній
*
Вторинна обробка інформації по сукупності послідовних оцінок координат цілі при первинній
*
Перший контакт з ціллю
*
Перший контакт з ціллю
*
Другий контакт з ціллю
*
Другий контакт з ціллю
*
Третій контакт з ціллю
*
Третій контакт з ціллю
*
Четвертий контакт з ціллю
*
Четвертий контакт з ціллю
*
П'ятий контакт з ціллю
*
П'ятий контакт з ціллю
*
Шостий контакт з ціллю
*
Шостий контакт з ціллю
*
Сьомий контакт з ціллю
*
Сьомий контакт з ціллю
*
Восьмий контакт з ціллю
*
Восьмий контакт з ціллю
*
Дійсна і фільтрована траєкторії цілі
*
Дійсна і фільтрована траєкторії цілі
*
Відслідковування траєкторій
І. Виявлення траєкторії включає зав'язування і підтвердження.
Зав'язування траєкторії здійснюється по
*
Відслідковування траєкторій
І. Виявлення траєкторії включає зав'язування і підтвердження.
Зав'язування траєкторії здійснюється по
*
ІІ. Супроводження траєкторії включає продовження траєкторії і траєкторні вимірювання.
Продовження траєкторії здійснюється
*
ІІ. Супроводження траєкторії включає продовження траєкторії і траєкторні вимірювання.
Продовження траєкторії здійснюється
*
ІІІ. Скидання траєкторії.
Скидання траєкторії з супроводження звичайно здійснюється по правилу “N
*
ІІІ. Скидання траєкторії.
Скидання траєкторії з супроводження звичайно здійснюється по правилу “N
Оцінка параметрів траєкторії
І. Фільтрація та екстраполяція
Фільтрація параметрів траєкторії –
Оцінка параметрів траєкторії
І. Фільтрація та екстраполяція
Фільтрація параметрів траєкторії –
*
Оптимальні оцінки параметрів траєкторії руху цілі знаходяться шляхом рішення системи матричних
*
Оптимальні оцінки параметрів траєкторії руху цілі знаходяться шляхом рішення системи матричних
*
Щоб зменшити навантаження на обчислювач ціною зростання помилок спрощують задачу:
- впродовж
*
Щоб зменшити навантаження на обчислювач ціною зростання помилок спрощують задачу:
- впродовж
*
ІІ. Згладжування
Згладжування – це оцінка параметрів траєкторії на будь-який момент часу
*
ІІ. Згладжування
Згладжування – це оцінка параметрів траєкторії на будь-який момент часу
*
Питання для самоконтролю
Який фільтр являється узгодженим?
Переваги і недоліки фільтрового виявляча.
Переваги
*
Питання для самоконтролю
Який фільтр являється узгодженим?
Переваги і недоліки фільтрового виявляча.
Переваги
 Семейный фитнес-центр «СССР»
Семейный фитнес-центр «СССР» Презентация "Сочинение по картине Федора Александровича Васильева «Мокрый луг»" - скачать презентации по МХК
Презентация "Сочинение по картине Федора Александровича Васильева «Мокрый луг»" - скачать презентации по МХК Конструкторская документация
Конструкторская документация Цифровые технологии печати
Цифровые технологии печати Международный финансовый рынок
Международный финансовый рынок Деньги, кредит, банки
Деньги, кредит, банки  Биология в искусстве. Интеллектуальный марафон "Биологическое соцветие"
Биология в искусстве. Интеллектуальный марафон "Биологическое соцветие" Дефініція мистецтва, як відкритого поняття
Дефініція мистецтва, як відкритого поняття Система отчисления чаевых для сотрудника iPay
Система отчисления чаевых для сотрудника iPay Top Ten Culture Shocks in Korea
Top Ten Culture Shocks in Korea Культура Київської Русі
Культура Київської Русі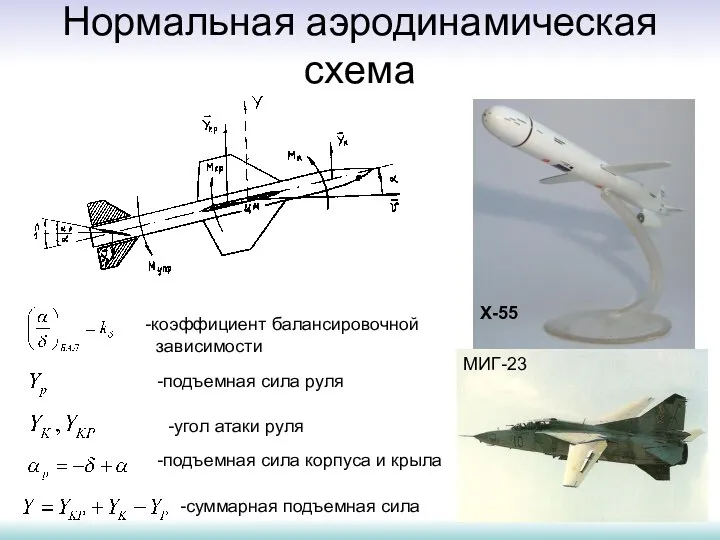 Нормальная аэродинамическая схема
Нормальная аэродинамическая схема ОЗЕРА
ОЗЕРА  kp_student
kp_student Монеты
Монеты Налог на прибыль организации
Налог на прибыль организации У краіне майстроў
У краіне майстроў RAZMINKA_05_chto_eto
RAZMINKA_05_chto_eto международный день птиц - презентация для начальной школы
международный день птиц - презентация для начальной школы Презентация на тему "Ошибки ставшие откытиями" - скачать презентации по Педагогике
Презентация на тему "Ошибки ставшие откытиями" - скачать презентации по Педагогике Марина Цветаева
Марина Цветаева Самоуправление в школе
Самоуправление в школе Презентация Дальневосточный Федеральный округ
Презентация Дальневосточный Федеральный округ Презентация "Проблемы города" - скачать презентации по Экономике
Презентация "Проблемы города" - скачать презентации по Экономике Выявление причин не включения компрессора на одной из секции электропоезда ЭТ2М
Выявление причин не включения компрессора на одной из секции электропоезда ЭТ2М Художественная культура античности. Древний Рим
Художественная культура античности. Древний Рим Иконопись. Изобразительное искусство Средневековой Руси
Иконопись. Изобразительное искусство Средневековой Руси Челси-Лестер
Челси-Лестер