- Т9 ІД РЛС.ppt

Содержание
- 2. * Імпульсно-доплерівський метод радіолокації. Вимірювання швидкості в ІД РЛС. Вимірювання дальності в ІД РЛС. Принципи роботи
- 3. Контрольні завдання (ІД РЛС) Помилки цілевказання у горизонтальній площині ±14 км, по висоті ±6 км. Розрахуйте
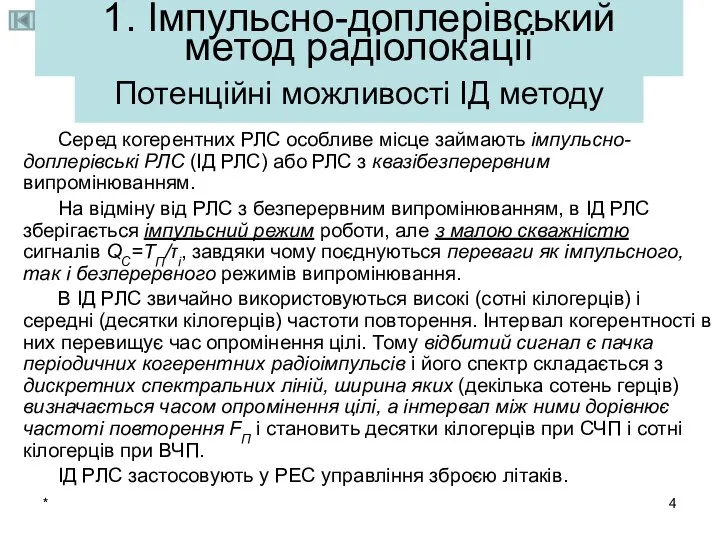
- 4. * Серед когерентних РЛС особливе місце займають імпульсно-доплерівські РЛС (ІД РЛС) або РЛС з квазібезперервним випромінюванням.
- 5. * Порівняльна характеристика РЛС
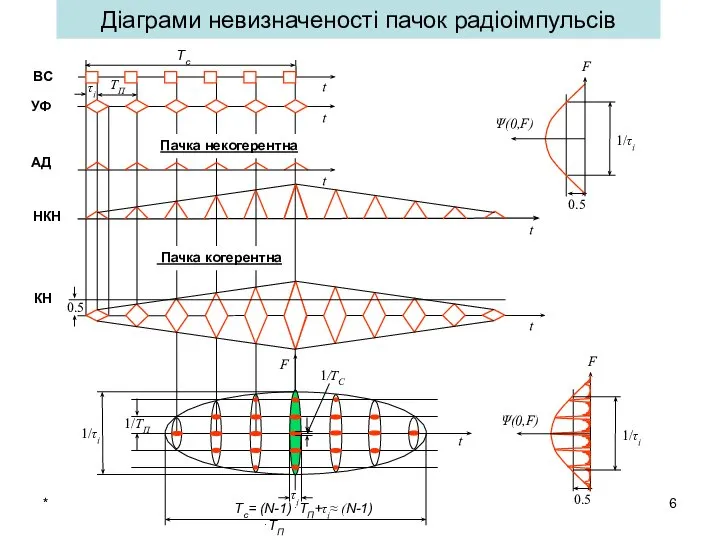
- 6. * Діаграми невизначеності пачок радіоімпульсів
- 7. * Спектр пачки когерентних радіоімпульсів Одиночний радіоімпульс
- 8. * Потенційні можливості Переваги імпульсно-доплерівського методу Імпульсний режим роботи дозволяє: - застосовувати одну прийомопередаючу антену, -
- 9. * Проблеми імпульсно-доплерівського методу Наявність мертвої зони. Наявність і велика кількість сліпих дальностей і швидкостей. Складність
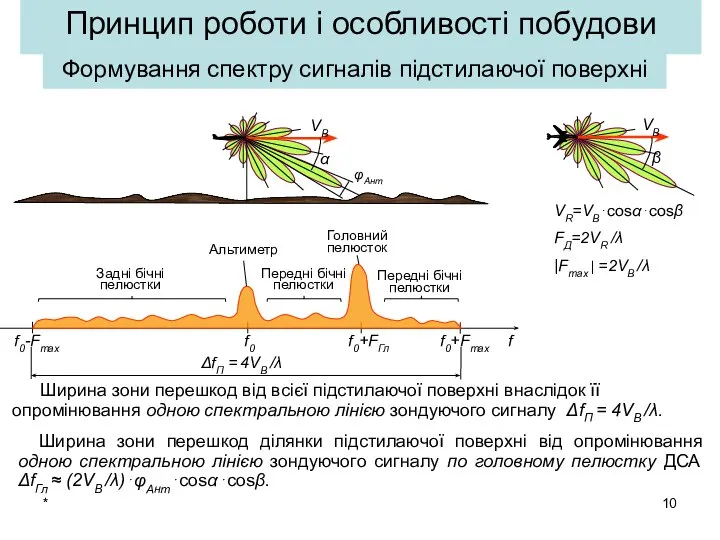
- 10. * Формування спектру сигналів підстилаючої поверхні Ширина зони перешкод від всієї підстилаючої поверхні внаслідок її опромінювання
- 11. Трансформація спектру сигналів від підстилаючої поверхні Вплив сканування ДСА по горизонталі Вплив зміни висоти польоту Вплив
- 12. Кільця дальності та ізодопи Наявність декількох кілець дальності та ізодоп призводить до збільшення рівня перешкод від
- 13. * Вплив взаємного положення і руху винищувача та цілі При атаці цілі в її ПНС VЗбл>VВ
- 14. * Зондування при ВЧП
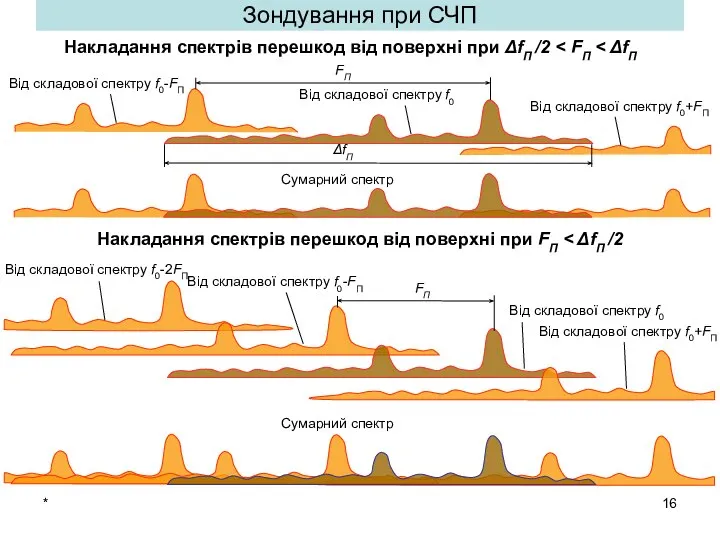
- 15. * При ВЧП FП>4VB /λ і між зонами перешкод від підстилаючої поверхні шириною 4VB /λ з'являються
- 16. * Зондування при СЧП
- 17. * В режимі СЧП частота повторення зондуючих сигналів FП Сумарний рівень перешкод залежить від кількості спектральних
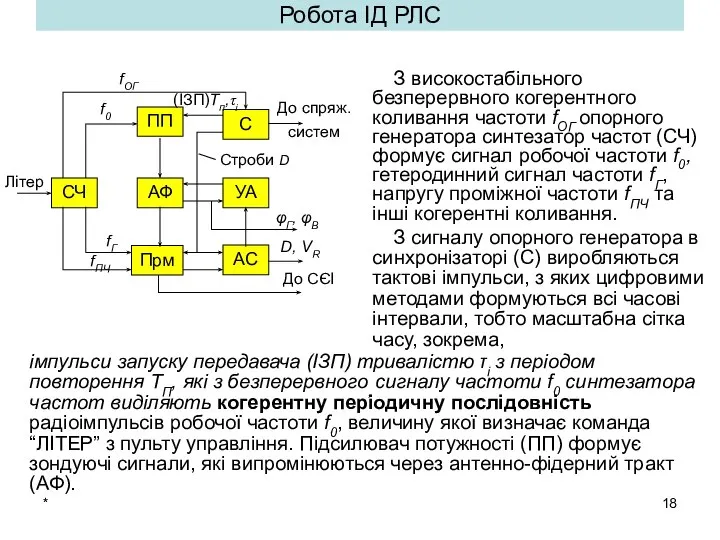
- 18. * Робота ІД РЛС З високостабільного безперервного когерентного коливання частоти fОГ опорного генератора синтезатор частот (СЧ)
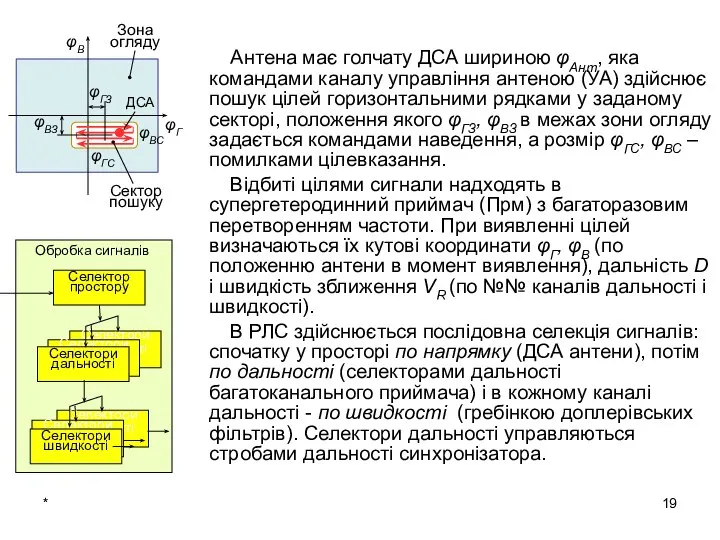
- 19. Антена має голчату ДСА шириною φАнт, яка командами каналу управління антеною (УА) здійснює пошук цілей горизонтальними
- 20. Інформація про кожну виявлену ціль (φГ, φВ, D і VR видається в базу даних ЕОМ, яка
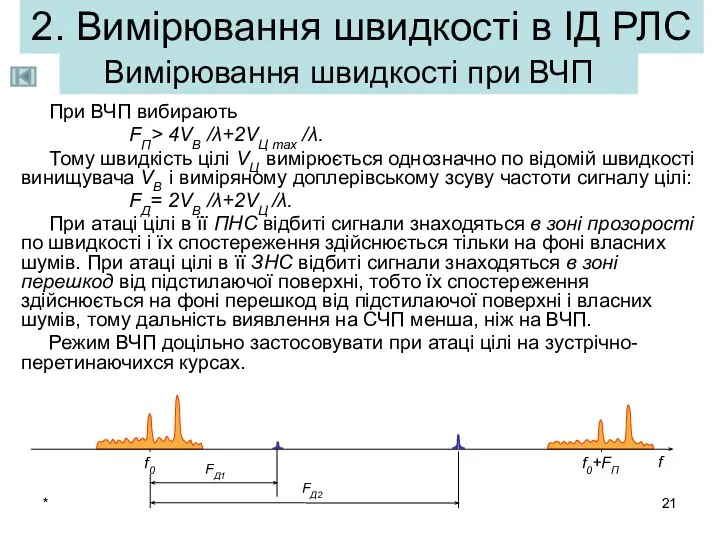
- 21. * 2. Вимірювання швидкості в ІД РЛС При ВЧП вибирають FП> 4VB /λ+2VЦ max /λ. Тому
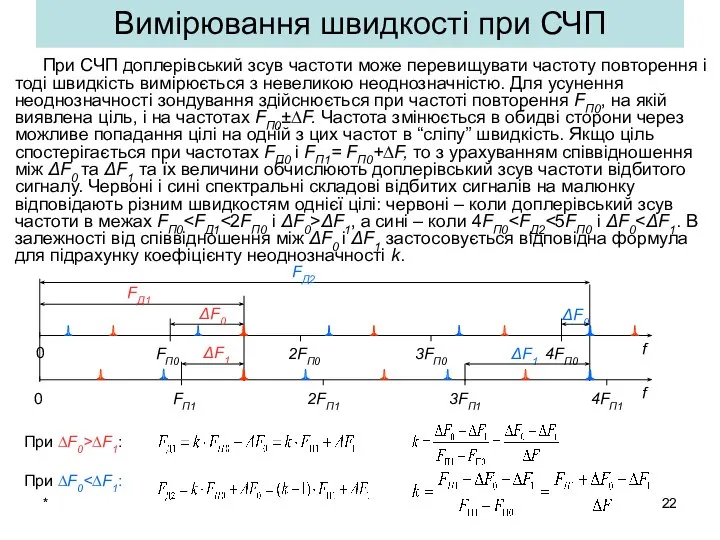
- 22. * Вимірювання швидкості при СЧП При СЧП доплерівський зсув частоти може перевищувати частоту повторення і тоді
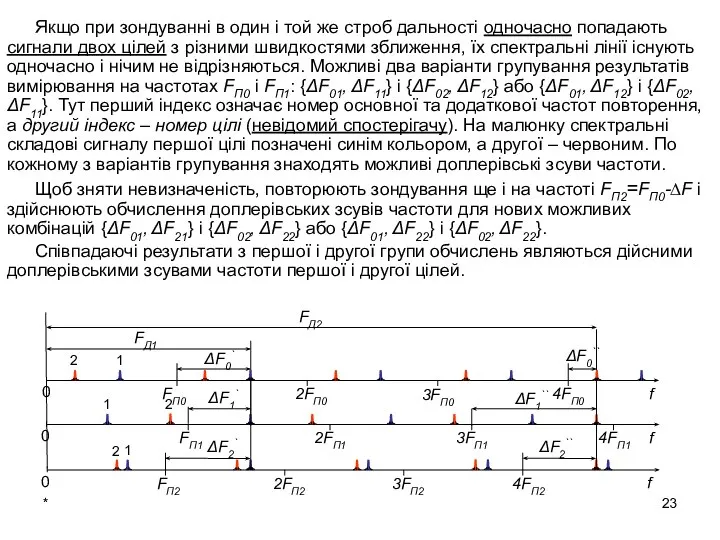
- 23. * Якщо при зондуванні в один і той же строб дальності одночасно попадають сигнали двох цілей
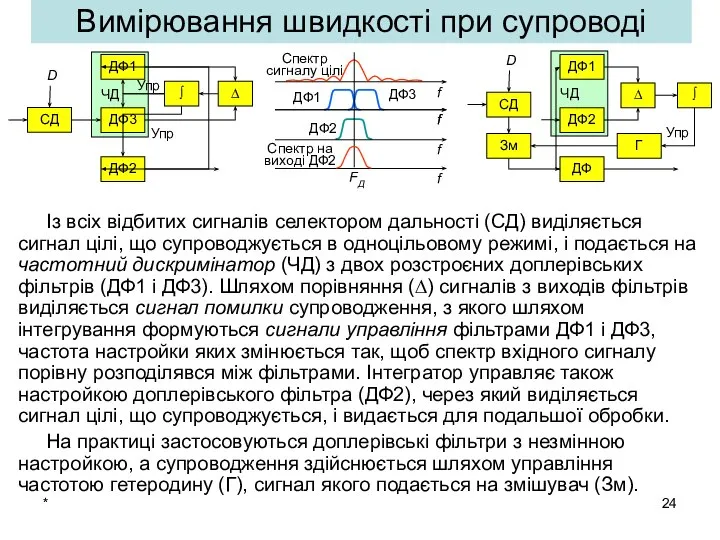
- 24. * Із всіх відбитих сигналів селектором дальності (СД) виділяється сигнал цілі, що супроводжується в одноцільовому режимі,
- 25. * 3. Вимірювання дальності в ІД РЛС Скважність QС=TП/τі зондуючих (і відбитих точковою ціллю) сигналів при
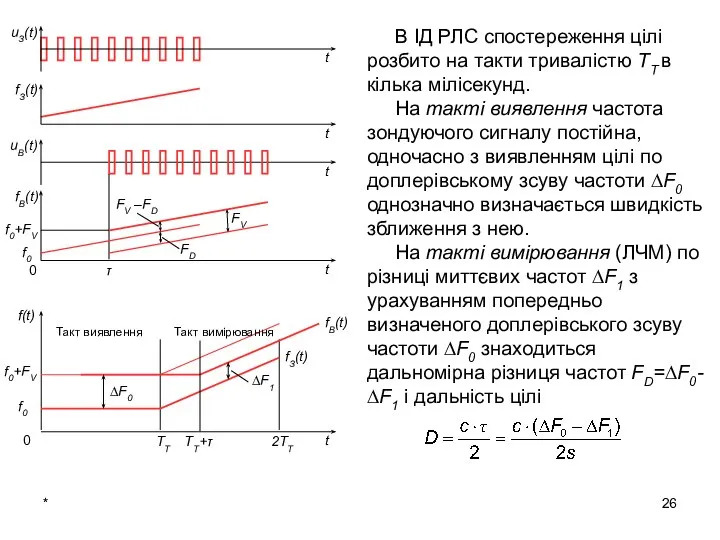
- 26. * В ІД РЛС спостереження цілі розбито на такти тривалістю ТТ в кілька мілісекунд. На такті
- 27. * Можлива ситуація, коли в одному напрямку знаходяться дві цілі з близькими швидкостями, але на різних
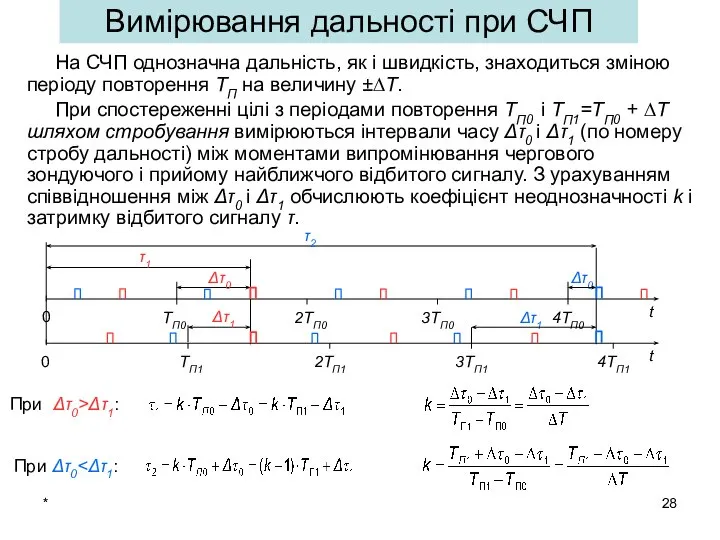
- 28. * На СЧП однозначна дальність, як і швидкість, знаходиться зміною періоду повторення ТП на величину ±∆Т.
- 29. * Як і при вимірюванні швидкості, степінь неоднозначності визначення дальності невелика і достатньо тільки двох періодів
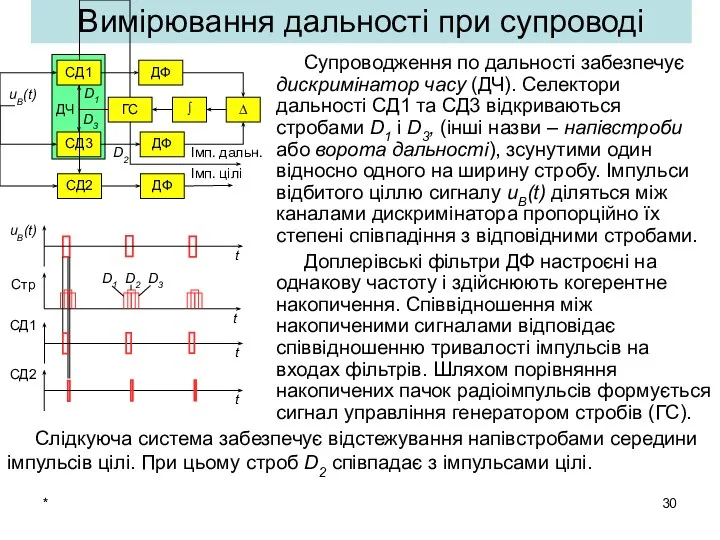
- 30. * Супроводження по дальності забезпечує дискримінатор часу (ДЧ). Селектори дальності СД1 та СД3 відкриваються стробами D1
- 31. * 4. Принципи роботи ІД РЛС і особливості їх побудови Особливості роботи при ВЧП та СЧП
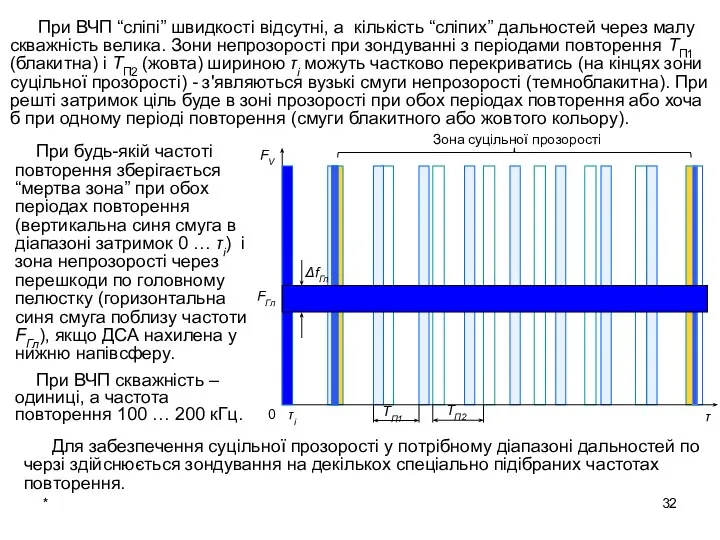
- 32. * При ВЧП “сліпі” швидкості відсутні, а кількість “сліпих” дальностей через малу скважність велика. Зони непрозорості
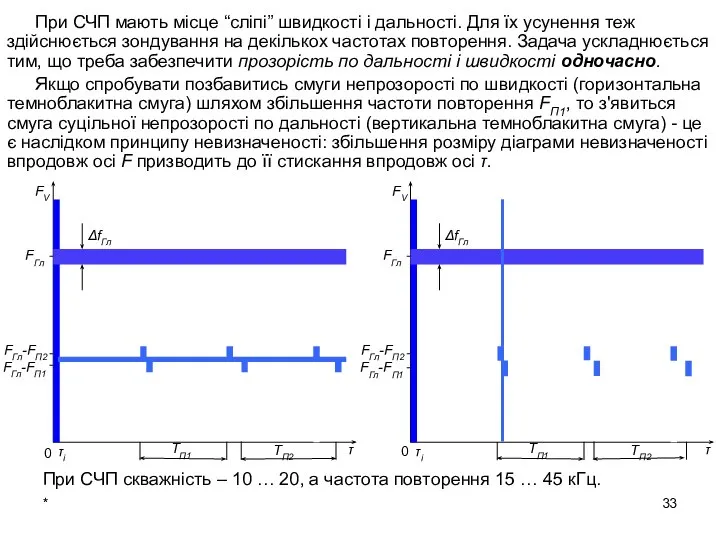
- 33. * При СЧП мають місце “сліпі” швидкості і дальності. Для їх усунення теж здійснюється зондування на
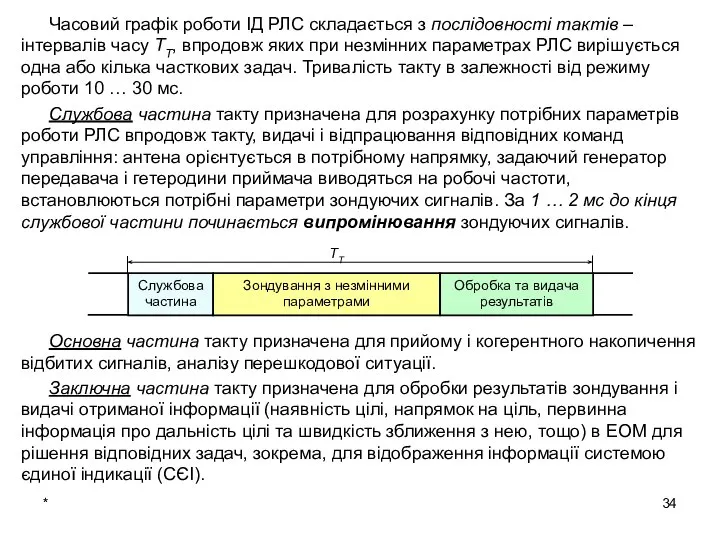
- 34. * Часовий графік роботи ІД РЛС складається з послідовності тактів – інтервалів часу ТТ, впродовж яких
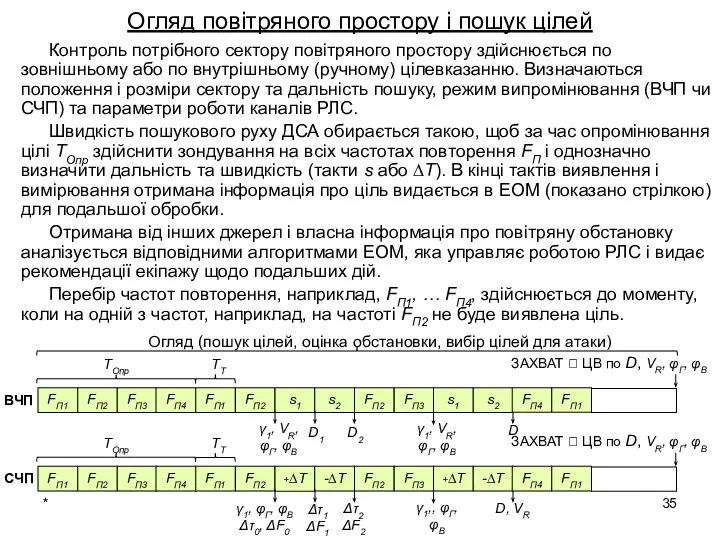
- 35. * Огляд повітряного простору і пошук цілей Контроль потрібного сектору повітряного простору здійснюється по зовнішньому або
- 36. * Інформація про виявлення цілі (γ1), поточне положення антени, тобто кутові координати цілі (φГ, φВ) видаються
- 37. * ДСА припиняє пошук і вона найкоротшим шляхом з максимальною швидкістю переміщується до вказаного напрямку (φГ,
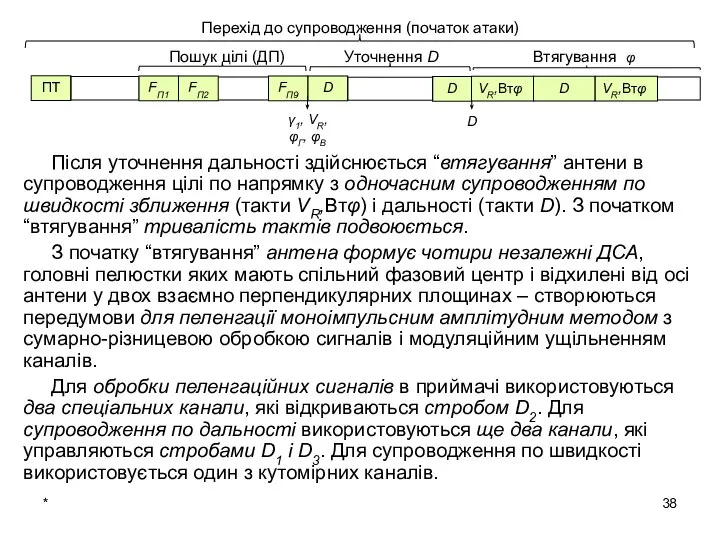
- 38. * Після уточнення дальності здійснюється “втягування” антени в супроводження цілі по напрямку з одночасним супроводженням по
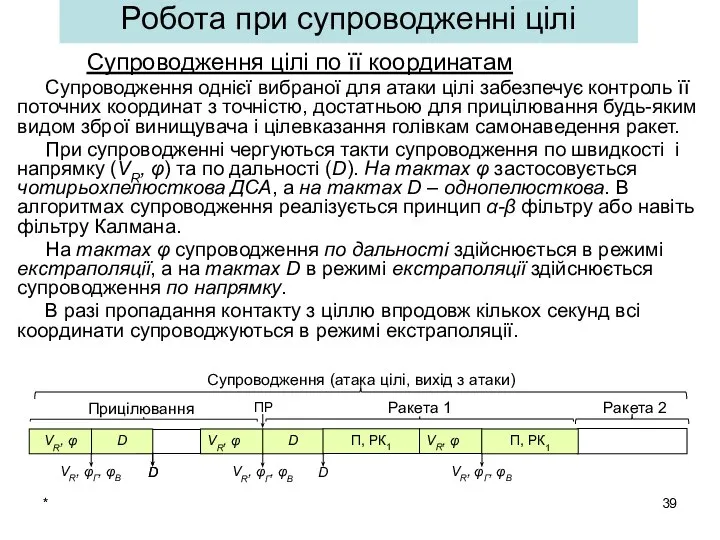
- 39. * Супроводження цілі по її координатам Супроводження однієї вибраної для атаки цілі забезпечує контроль її поточних
- 40. Підсвітлювання і радіокорекція Інформація про поточні координати і параметри руху цілі при застосуванні будь-якого виду зброї
- 41. * Питання для самоконтролю Особливості ІД РЛС з ВЧП. Особливості РЛС з СЧЛ. Принципи побудови ІД
- 43. Скачать презентацию
*
Імпульсно-доплерівський метод радіолокації.
Вимірювання швидкості в ІД РЛС.
Вимірювання дальності в ІД
*
Імпульсно-доплерівський метод радіолокації.
Вимірювання швидкості в ІД РЛС.
Вимірювання дальності в ІД
Контрольні завдання (ІД РЛС)
Помилки цілевказання у горизонтальній площині ±14 км, по
Контрольні завдання (ІД РЛС)
Помилки цілевказання у горизонтальній площині ±14 км, по
*
Серед когерентних РЛС особливе місце займають імпульсно-доплерівські РЛС (ІД РЛС) або
*
Серед когерентних РЛС особливе місце займають імпульсно-доплерівські РЛС (ІД РЛС) або

*
Порівняльна характеристика РЛС
*
Порівняльна характеристика РЛС
*
Діаграми невизначеності пачок радіоімпульсів
*
Діаграми невизначеності пачок радіоімпульсів
*
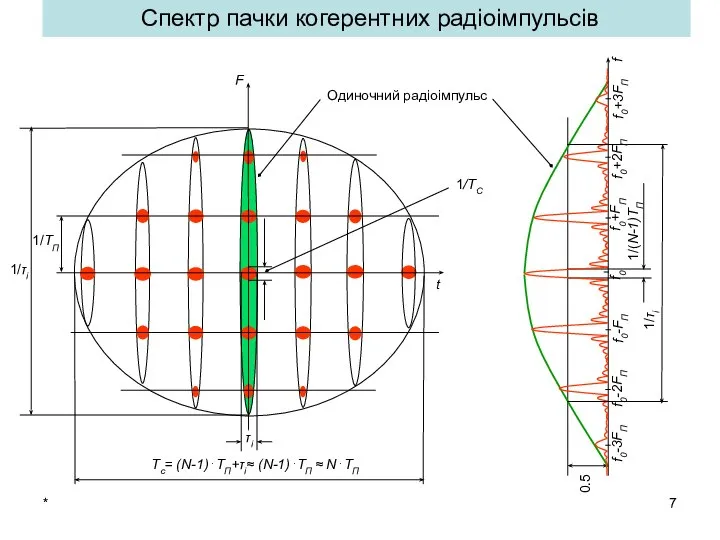
Спектр пачки когерентних радіоімпульсів
Одиночний радіоімпульс
*
Спектр пачки когерентних радіоімпульсів
Одиночний радіоімпульс
*
Потенційні можливості
Переваги імпульсно-доплерівського методу
Імпульсний режим роботи дозволяє:
- застосовувати одну прийомопередаючу
*
Потенційні можливості
Переваги імпульсно-доплерівського методу
Імпульсний режим роботи дозволяє:
- застосовувати одну прийомопередаючу
*
Проблеми імпульсно-доплерівського методу
Наявність мертвої зони.
Наявність і велика кількість сліпих дальностей
*
Проблеми імпульсно-доплерівського методу
Наявність мертвої зони.
Наявність і велика кількість сліпих дальностей
*
Формування спектру сигналів підстилаючої поверхні
Ширина зони перешкод від всієї підстилаючої поверхні
*
Формування спектру сигналів підстилаючої поверхні
Ширина зони перешкод від всієї підстилаючої поверхні
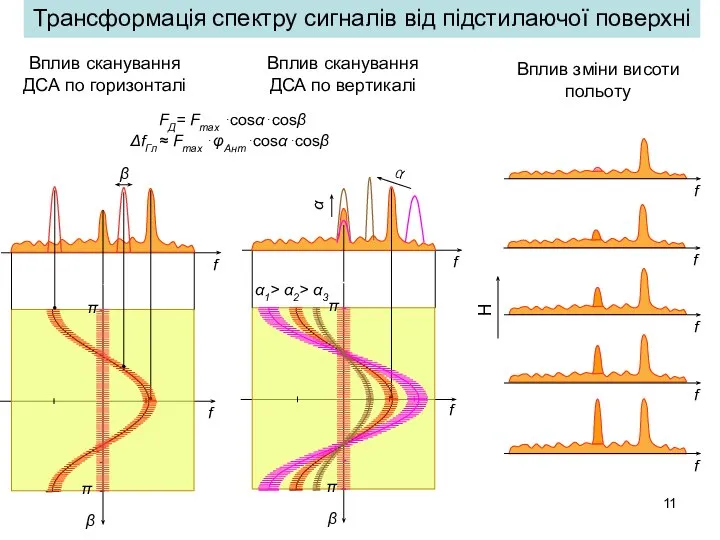
Трансформація спектру сигналів від підстилаючої поверхні
Вплив сканування ДСА по горизонталі
Вплив зміни
Трансформація спектру сигналів від підстилаючої поверхні
Вплив сканування ДСА по горизонталі
Вплив зміни
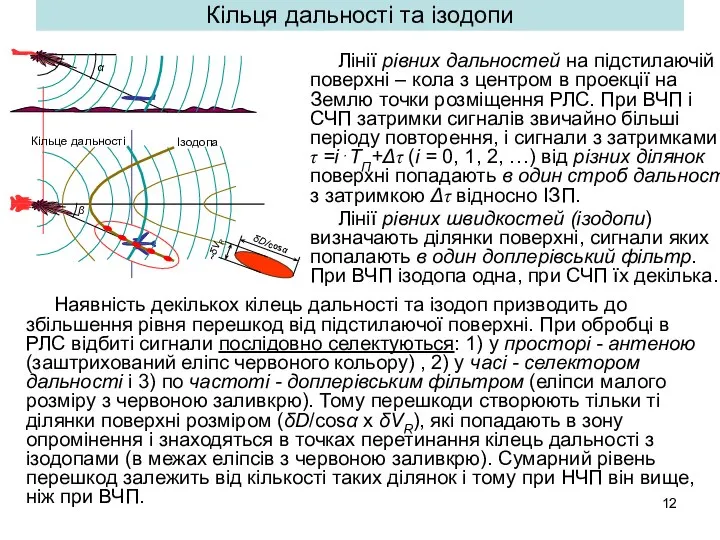
Кільця дальності та ізодопи
Наявність декількох кілець дальності та ізодоп призводить до
Кільця дальності та ізодопи
Наявність декількох кілець дальності та ізодоп призводить до
*
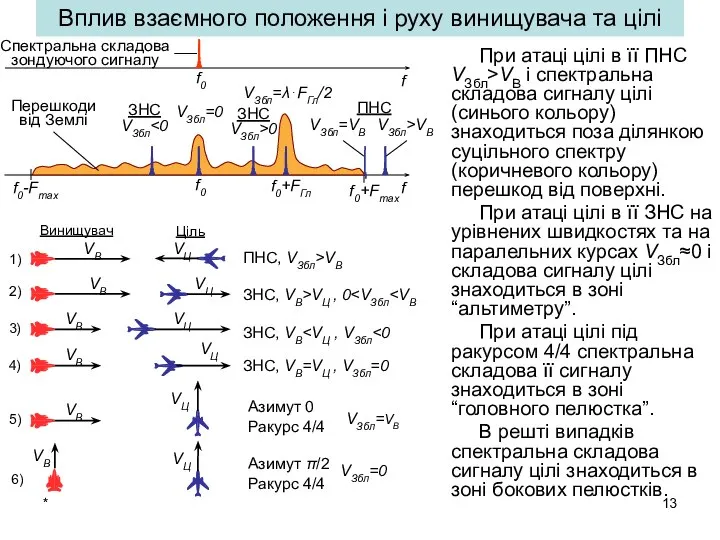
Вплив взаємного положення і руху винищувача та цілі
При атаці цілі в
*
Вплив взаємного положення і руху винищувача та цілі
При атаці цілі в
*
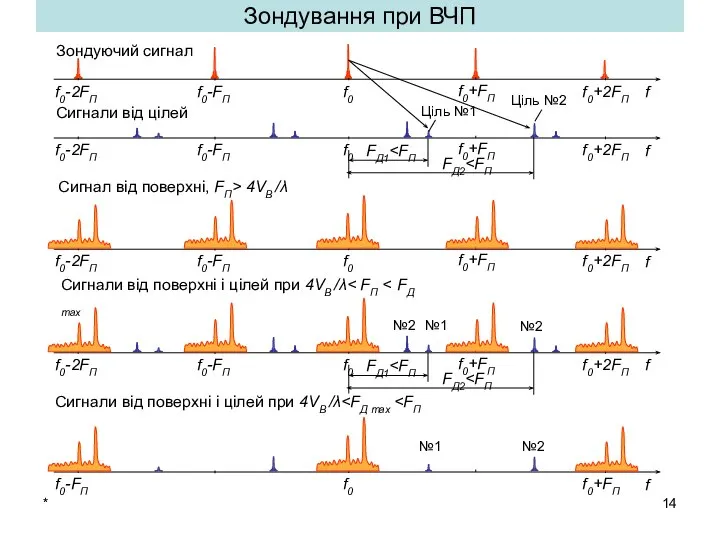
Зондування при ВЧП
*
Зондування при ВЧП
*
При ВЧП FП>4VB /λ і між зонами перешкод від підстилаючої поверхні
*
При ВЧП FП>4VB /λ і між зонами перешкод від підстилаючої поверхні
*
Зондування при СЧП
*
Зондування при СЧП
*
В режимі СЧП частота повторення зондуючих сигналів FП<ΔfП=4VB /λ. При цьому
*
В режимі СЧП частота повторення зондуючих сигналів FП<ΔfП=4VB /λ. При цьому
*
Робота ІД РЛС
З високостабільного безперервного когерентного коливання частоти fОГ опорного генератора
*
Робота ІД РЛС
З високостабільного безперервного когерентного коливання частоти fОГ опорного генератора
Антена має голчату ДСА шириною φАнт, яка командами каналу управління антеною
Антена має голчату ДСА шириною φАнт, яка командами каналу управління антеною
Інформація про кожну виявлену ціль (φГ, φВ, D і VR видається
Інформація про кожну виявлену ціль (φГ, φВ, D і VR видається
*
2. Вимірювання швидкості в ІД РЛС
При ВЧП вибирають
FП> 4VB /λ+2VЦ max
*
2. Вимірювання швидкості в ІД РЛС
При ВЧП вибирають
FП> 4VB /λ+2VЦ max
*
Вимірювання швидкості при СЧП
При СЧП доплерівський зсув частоти може перевищувати частоту
*
Вимірювання швидкості при СЧП
При СЧП доплерівський зсув частоти може перевищувати частоту
*
Якщо при зондуванні в один і той же строб дальності одночасно
*
Якщо при зондуванні в один і той же строб дальності одночасно
*
Із всіх відбитих сигналів селектором дальності (СД) виділяється сигнал цілі, що
*
Із всіх відбитих сигналів селектором дальності (СД) виділяється сигнал цілі, що
*
3. Вимірювання дальності в ІД РЛС
Скважність QС=TП/τі зондуючих (і відбитих точковою
*
3. Вимірювання дальності в ІД РЛС
Скважність QС=TП/τі зондуючих (і відбитих точковою
*
В ІД РЛС спостереження цілі розбито на такти тривалістю ТТ в
*
В ІД РЛС спостереження цілі розбито на такти тривалістю ТТ в
*
Можлива ситуація, коли в одному напрямку знаходяться дві цілі з близькими
*
Можлива ситуація, коли в одному напрямку знаходяться дві цілі з близькими
*
На СЧП однозначна дальність, як і швидкість, знаходиться зміною періоду повторення
*
На СЧП однозначна дальність, як і швидкість, знаходиться зміною періоду повторення
*
Як і при вимірюванні швидкості, степінь неоднозначності визначення дальності невелика і
*
Як і при вимірюванні швидкості, степінь неоднозначності визначення дальності невелика і
*
Супроводження по дальності забезпечує дискримінатор часу (ДЧ). Селектори дальності СД1 та
*
Супроводження по дальності забезпечує дискримінатор часу (ДЧ). Селектори дальності СД1 та
*
4. Принципи роботи ІД РЛС і особливості їх побудови
Особливості роботи при
*
4. Принципи роботи ІД РЛС і особливості їх побудови
Особливості роботи при
*
При ВЧП “сліпі” швидкості відсутні, а кількість “сліпих” дальностей через малу
*
При ВЧП “сліпі” швидкості відсутні, а кількість “сліпих” дальностей через малу
*
При СЧП мають місце “сліпі” швидкості і дальності. Для їх усунення
*
При СЧП мають місце “сліпі” швидкості і дальності. Для їх усунення
*
Часовий графік роботи ІД РЛС складається з послідовності тактів – інтервалів
*
Часовий графік роботи ІД РЛС складається з послідовності тактів – інтервалів
*
Огляд повітряного простору і пошук цілей
Контроль потрібного сектору повітряного простору здійснюється
*
Огляд повітряного простору і пошук цілей
Контроль потрібного сектору повітряного простору здійснюється
*
Інформація про виявлення цілі (γ1), поточне положення антени, тобто кутові координати
*
Інформація про виявлення цілі (γ1), поточне положення антени, тобто кутові координати
*
ДСА припиняє пошук і вона найкоротшим шляхом з максимальною швидкістю переміщується
*
ДСА припиняє пошук і вона найкоротшим шляхом з максимальною швидкістю переміщується
*
Після уточнення дальності здійснюється “втягування” антени в супроводження цілі по напрямку
*
Після уточнення дальності здійснюється “втягування” антени в супроводження цілі по напрямку
*
Супроводження цілі по її координатам
Супроводження однієї вибраної для атаки цілі
*
Супроводження цілі по її координатам
Супроводження однієї вибраної для атаки цілі
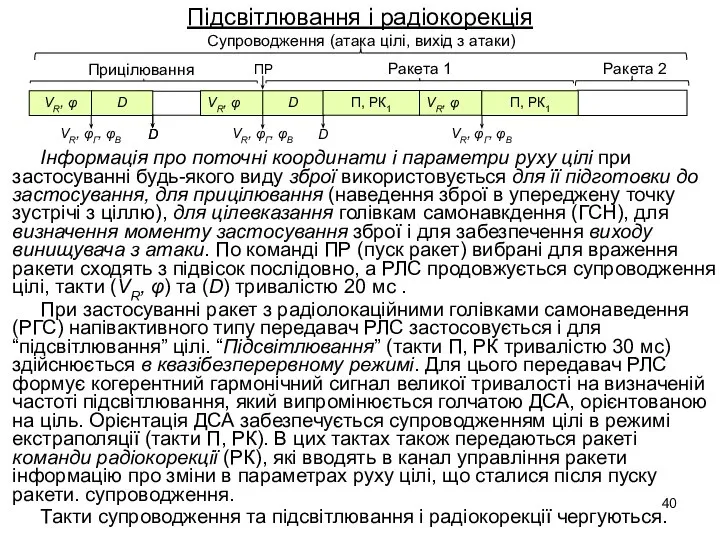
Підсвітлювання і радіокорекція
Інформація про поточні координати і параметри руху цілі при
Підсвітлювання і радіокорекція
Інформація про поточні координати і параметри руху цілі при
*
Питання для самоконтролю
Особливості ІД РЛС з ВЧП.
Особливості РЛС з СЧЛ.
Принципи
*
Питання для самоконтролю
Особливості ІД РЛС з ВЧП.
Особливості РЛС з СЧЛ.
Принципи
 Бумажная пластика - презентация для начальной школы
Бумажная пластика - презентация для начальной школы Издержки фирмы
Издержки фирмы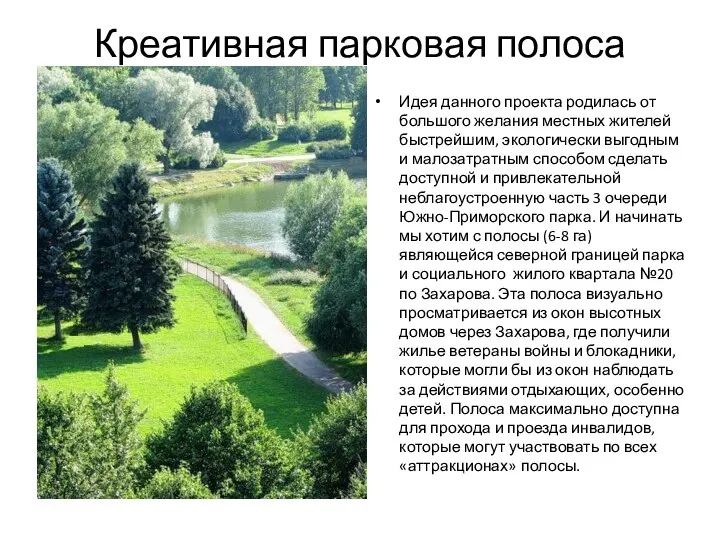 Креативная парковая полоса
Креативная парковая полоса Культура Китая Выполнила Биер Анастасия ученица МОУ СОШ №13 10 класса
Культура Китая Выполнила Биер Анастасия ученица МОУ СОШ №13 10 класса Игры и развлечения на воде, применяемые на различных этапах обучения
Игры и развлечения на воде, применяемые на различных этапах обучения Презентация "Готический стиль" - скачать презентации по МХК
Презентация "Готический стиль" - скачать презентации по МХК Нормирование точности деталей вал и стакан цилиндрического двухступенчатого редуктора
Нормирование точности деталей вал и стакан цилиндрического двухступенчатого редуктора Загрязнения Каспийского моря нефтью и нефтепродуктами
Загрязнения Каспийского моря нефтью и нефтепродуктами Презентация на тему "Диагностика инновационного потенциала личности" - скачать презентации по Педагогике
Презентация на тему "Диагностика инновационного потенциала личности" - скачать презентации по Педагогике Разрезы (вырезы) на аксонометрических изображениях деталей. 8 класс
Разрезы (вырезы) на аксонометрических изображениях деталей. 8 класс Распространенные заболевания человека
Распространенные заболевания человека Тәулсіз қазақстанның сыртқы саясатының доктринасы
Тәулсіз қазақстанның сыртқы саясатының доктринасы Кривошипно-шатунный механизм
Кривошипно-шатунный механизм Сучасне теплове обладнання (Експрес-кавоварки)
Сучасне теплове обладнання (Експрес-кавоварки) Лекція 8. Українська культура другої половини XX століття
Лекція 8. Українська культура другої половини XX століття Історія української культури
Історія української культури Христианство. Распространение христианства в мире
Христианство. Распространение христианства в мире Существующие системы контроля технического состояния автосцепного устройства
Существующие системы контроля технического состояния автосцепного устройства Улан-Удэ, 2009. - презентация
Улан-Удэ, 2009. - презентация Резьба. Крепёжные изделия
Резьба. Крепёжные изделия КОВАЛЕВСКАЯ Софья Васильевна (1850-1891)
КОВАЛЕВСКАЯ Софья Васильевна (1850-1891) Турбо Паскаль
Турбо Паскаль Введение в религиоведение
Введение в религиоведение Разработка главных страниц и пользовательских элементов управления
Разработка главных страниц и пользовательских элементов управления Königsberger
Königsberger Проф. д-р Иван Козовски Управител на Медицински център за асистирана репродукция “Варна” ООД
Проф. д-р Иван Козовски Управител на Медицински център за асистирана репродукция “Варна” ООД Графические возможности яп VB
Графические возможности яп VB Композиционные и оксидные проводящие материалы
Композиционные и оксидные проводящие материалы