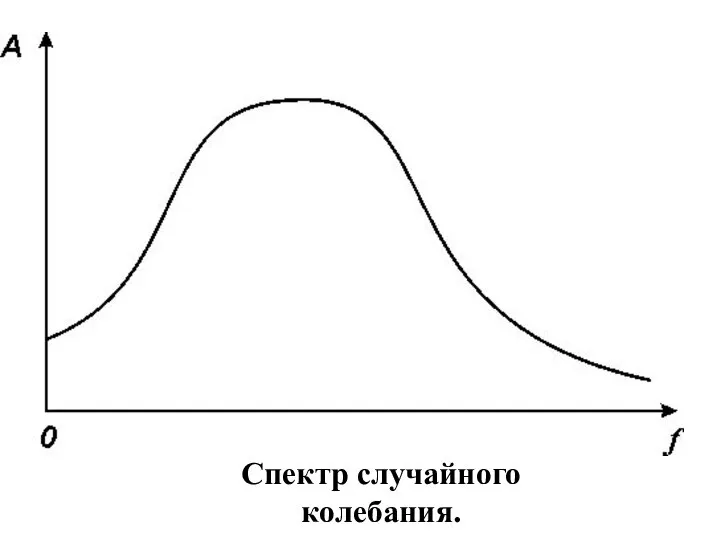
- Виброакустические измерения

Содержание
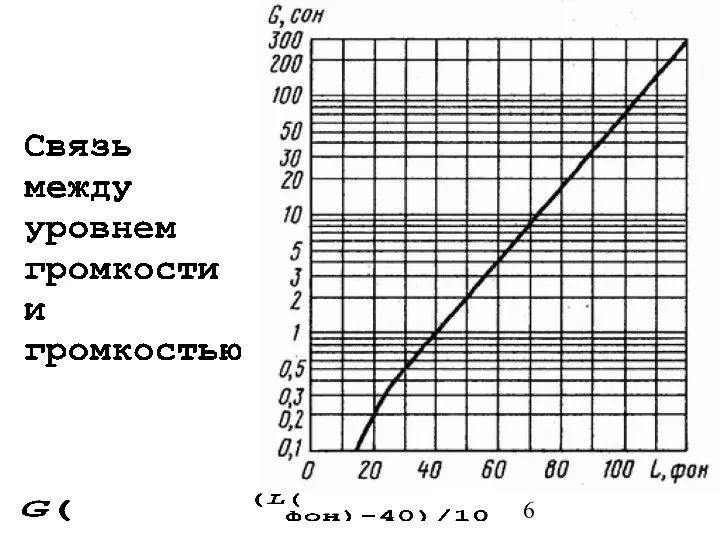
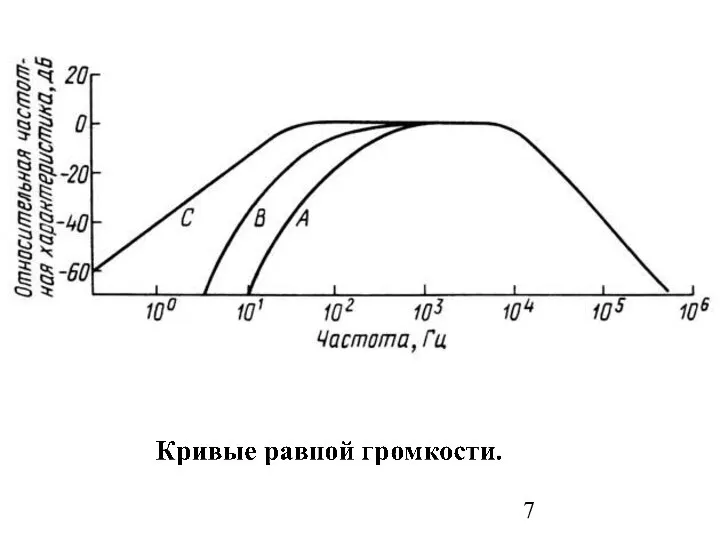
- 5. КРИВЫЕ РАВНОЙ ГРОМКОСТИ
- 10. В системах измерения шума и вибраций принято использовать так называемые октавные и третьоктавные фильтры Полоса пропускания
- 12. МЕТОДЫ ОБРАБОТКИ (АКУСТИЧЕСКИХ) СИГНАЛОВ Визуальный анализ временного наполнения и динамики сигналов Выделение медленных трендов и быстроизменяющихся
- 13. Датчики вибрации: пьезоэлектрические преобразователи вибрации (акселерометры), индукционные преобразователи вибрации (датчики скорости), индуктивные датчики вибрации (измерители скорости),
- 14. F = - m a F = m a
- 15. Для повышения чувствительности преобразователей увеличивают инерционную массу, применяют пьезокерамику, обладающую высоким пьезомодулем (титанат бария и родственные
- 16. F = - m a F = m a
- 17. Рис. 4. 9. Конструкция высокочувствительного акселерометра. Основные достоинства пьезоакселерометров: Высокая чувствительность датчика, широкий диапазон рабочих частот,
- 19. Методы измерения для пьезоакселерометров Использование прямого пьезоэффекта. Измеряется электрический заряд или напряжение при действии ускорения. Недостаток:
- 22. ОСНОВНЫЕ ПРЕИМУЩЕСТВА индукционных преобразователей виброскорости: простота конструкции, надежность, высокая чувствительность НЕДОСТАТКИ: ограниченный частотный диапазон ( от
- 23. Индуктивный преобразователь является параметрическим - перемещение одного из его элементов при вибрации вызывает изменение индуктивности системы
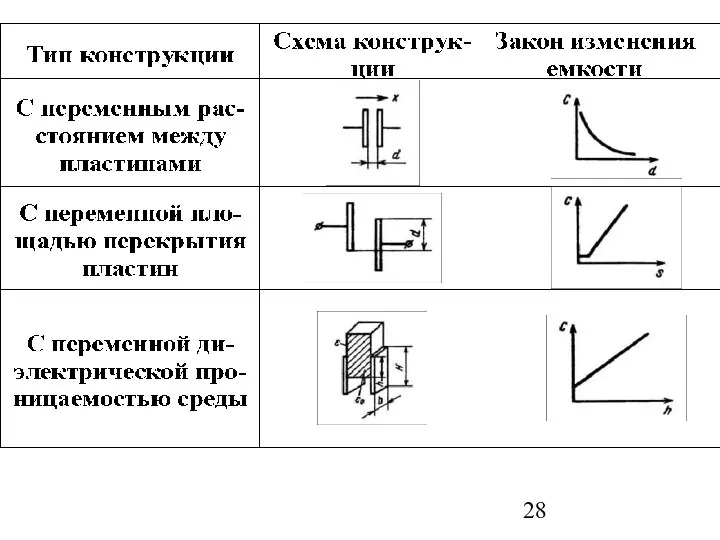
- 25. Схемы индуктивных преобразователей виброперемещений: а – с переменой площадью зазора; б – с переменной длиной зазора;
- 26. Индуктивные преобразователи имеют гораздо меньшую массу, чем индукционные, тем не менее, область их применения ограничена измерением
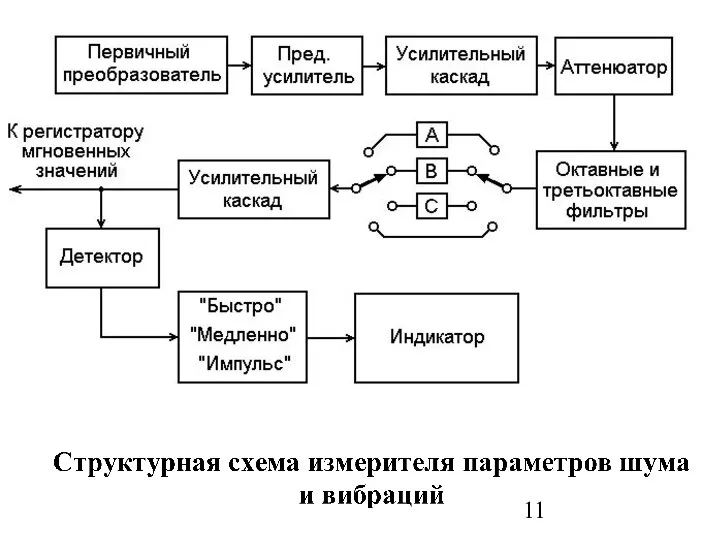
- 32. 4. Практические вопросы реализации электрических измерений Блок – схема измерительного канала с АЦП и РС. Свойства
- 34. Скачать презентацию
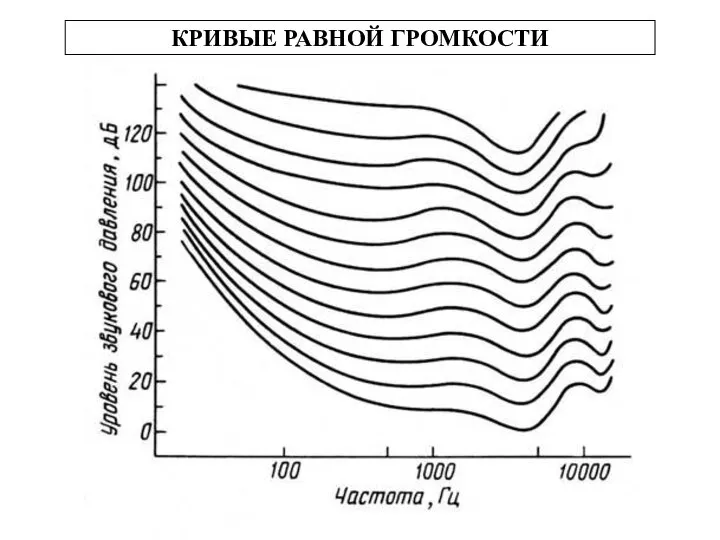
КРИВЫЕ РАВНОЙ ГРОМКОСТИ
КРИВЫЕ РАВНОЙ ГРОМКОСТИ


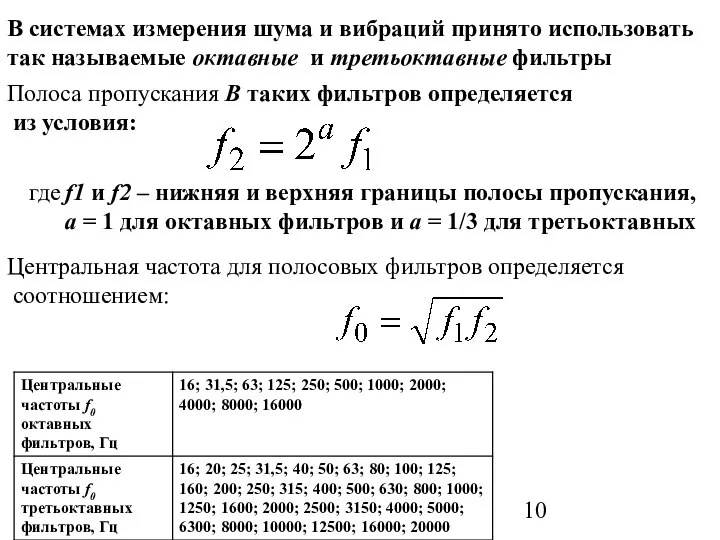
В системах измерения шума и вибраций принято использовать так называемые октавные
В системах измерения шума и вибраций принято использовать так называемые октавные
МЕТОДЫ ОБРАБОТКИ (АКУСТИЧЕСКИХ) СИГНАЛОВ
Визуальный анализ временного наполнения и динамики сигналов
Выделение
МЕТОДЫ ОБРАБОТКИ (АКУСТИЧЕСКИХ) СИГНАЛОВ
Визуальный анализ временного наполнения и динамики сигналов
Выделение
Датчики вибрации:
пьезоэлектрические преобразователи вибрации (акселерометры),
индукционные преобразователи вибрации (датчики скорости),
индуктивные
Датчики вибрации:
пьезоэлектрические преобразователи вибрации (акселерометры),
индукционные преобразователи вибрации (датчики скорости),
индуктивные
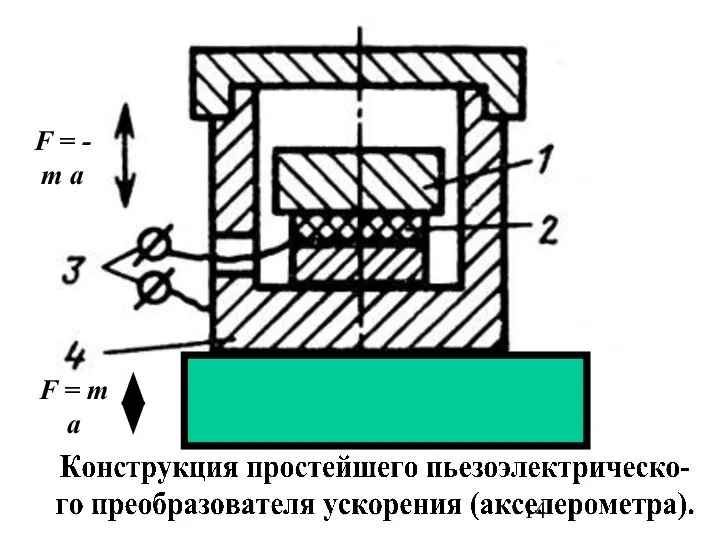
F = - m a
F = m a
F = - m a
F = m a
Для повышения чувствительности преобразователей
увеличивают инерционную массу,
применяют пьезокерамику, обладающую высоким пьезомодулем
Для повышения чувствительности преобразователей
увеличивают инерционную массу,
применяют пьезокерамику, обладающую высоким пьезомодулем
F = - m a
F = m a
F = - m a
F = m a
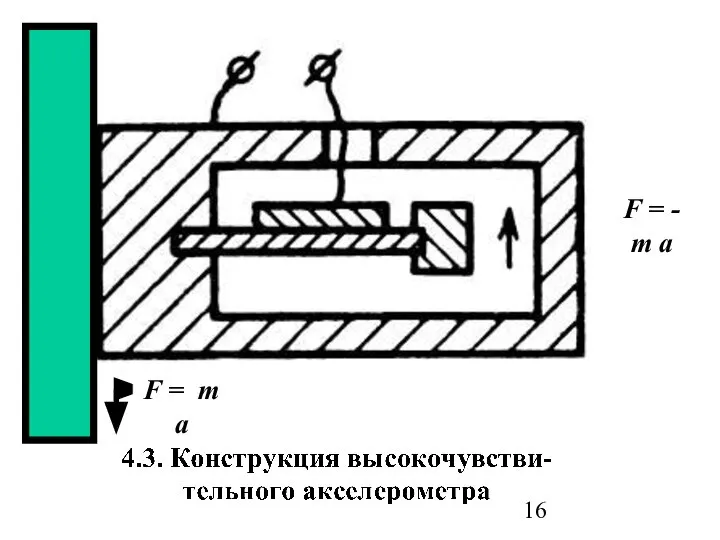
Рис. 4. 9. Конструкция высокочувствительного акселерометра.
Основные достоинства пьезоакселерометров:
Высокая чувствительность датчика,
широкий
Рис. 4. 9. Конструкция высокочувствительного акселерометра.
Основные достоинства пьезоакселерометров:
Высокая чувствительность датчика,
широкий

Методы измерения для пьезоакселерометров
Использование прямого пьезоэффекта.
Измеряется электрический заряд или напряжение при
Методы измерения для пьезоакселерометров
Использование прямого пьезоэффекта.
Измеряется электрический заряд или напряжение при
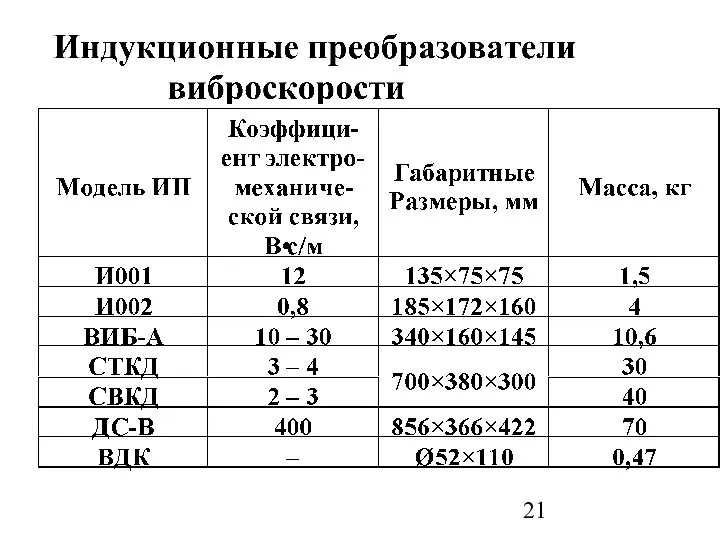
ОСНОВНЫЕ ПРЕИМУЩЕСТВА
индукционных
преобразователей виброскорости:
простота конструкции,
надежность,
высокая чувствительность
НЕДОСТАТКИ:
ограниченный частотный диапазон
ОСНОВНЫЕ ПРЕИМУЩЕСТВА
индукционных
преобразователей виброскорости:
простота конструкции,
надежность,
высокая чувствительность
НЕДОСТАТКИ:
ограниченный частотный диапазон
Индуктивный преобразователь является параметрическим - перемещение одного из его элементов при
Индуктивный преобразователь является параметрическим - перемещение одного из его элементов при

Схемы индуктивных преобразователей
виброперемещений:
а – с переменой площадью зазора;
б – с
Схемы индуктивных преобразователей
виброперемещений:
а – с переменой площадью зазора;
б – с
Индуктивные преобразователи имеют гораздо меньшую массу, чем индукционные, тем не
Индуктивные преобразователи имеют гораздо меньшую массу, чем индукционные, тем не


4. Практические вопросы реализации
электрических измерений
Блок – схема измерительного канала с
4. Практические вопросы реализации
электрических измерений
Блок – схема измерительного канала с
 Несуча система вертольота
Несуча система вертольота Лекция 6 Тема: Выдача нотариусом Свидетельства о праве на наследство
Лекция 6 Тема: Выдача нотариусом Свидетельства о праве на наследство Гостюхина Светлана Николаевна учитель географии МКОУ СОШ с УИОП г. Кирс высшая категория
Гостюхина Светлана Николаевна учитель географии МКОУ СОШ с УИОП г. Кирс высшая категория Аттестационная работа. Туризм и здоровье. Виды туризма
Аттестационная работа. Туризм и здоровье. Виды туризма Необычные дома мира
Необычные дома мира Захист інформації в інформаційно-комунікаційних системах. Ч.1. Безпека CDMA
Захист інформації в інформаційно-комунікаційних системах. Ч.1. Безпека CDMA Современные технологии ремонта и усиления железобетона
Современные технологии ремонта и усиления железобетона Политическая география и геополитика
Политическая география и геополитика Свойства воды окружающий мир 2 класс
Свойства воды окружающий мир 2 класс Локальные войны. Война в Афганистане
Локальные войны. Война в Афганистане Процессор. Упрощенная логическая схема одноядерного процессора
Процессор. Упрощенная логическая схема одноядерного процессора Политическая партия "Жас қанат"
Политическая партия "Жас қанат" Методика определения цены
Методика определения цены Регистры. Лекция 8 (2)
Регистры. Лекция 8 (2) Характеристика интеграционных тенденций в новых индустриальных странах
Характеристика интеграционных тенденций в новых индустриальных странах Государство, как политический институт
Государство, как политический институт Олимпийские игры 2018
Олимпийские игры 2018 ИФСТ Интерактивное программирование веб-приложении
ИФСТ Интерактивное программирование веб-приложении  Явление экстремизма в молодежной среде: фанат, спортивный болельщик, экстремист
Явление экстремизма в молодежной среде: фанат, спортивный болельщик, экстремист Барокко
Барокко Git python core
Git python core Деньги
Деньги  Сказка о рыбаке и рыбке - презентация для начальной школы
Сказка о рыбаке и рыбке - презентация для начальной школы JOBS: SKILLS AND ABILITIES
JOBS: SKILLS AND ABILITIES Праздник масленица
Праздник масленица Курсовая работа «Формирование навыков аудирования на старшем этапе обучения в контексте подготовки к ЕГЭ»
Курсовая работа «Формирование навыков аудирования на старшем этапе обучения в контексте подготовки к ЕГЭ» Компьютерная сеть
Компьютерная сеть Мясо Мангал. Игра, Миссия или Бизнес?
Мясо Мангал. Игра, Миссия или Бизнес?