- Введение в робототехнику

Содержание
- 2. Немного из истории В основу слова «робототехника» легло слово «робот», придуманное в 1920 г. чешским писателем
- 3. Виды робототехники Строительная Промышленная Бытовая Авиационная Экстремальная Военная Космическая Подводная
- 4. Законы робототехники Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён
- 5. В 1986 году в романе Роботы и Империя (англ. Robots and Empire) Азимов предложил Нулевой Закон:
- 6. Законы объединения
- 7. В грязной обуви, друзья, В кабинет входить нельзя.
- 8. В одежде мокрой не входить, Руки тоже не мочить.
- 9. Начинать работу строго, С разрешения педагога, И учтите: Вы в ответе, За порядок в кабинете.
- 10. Шнуры, розетки, провода Не надо трогать никогда.
- 11. Бережливым быть умей, И по клавишам не бей, Там учтите этот факт, Электрический контакт.
- 12. Любит мышка, чтобы были Руки чистыми, сухими. Лучше здесь не пить, не кушать, Чтоб порядок не
- 13. Если вводишь ты ответ, А компьютер скажет нет, По дисплею не стучи, Лучше правила учи!
- 14. Если сбой дает машина, Терпение вам необходимо, Не бывает без проблем Даже с умной ЭВМ.
- 15. Остальное всем известно: Чтоб не вскакивали с места, Не кричали, не толкались, За компьютеры не дрались.
- 16. Если где-то заискрит, Или что-нибудь дымит. Время попусту не трать – Нужно учителя позвать.
- 17. По экрану не стучи, Мышку в руку ты возьми И что надо покажи.
- 18. Спину ровно ты держи, На расстоянии 60 см От экрана ты сиди.
- 19. За компьютером сидишь, За дисплеем ты следишь. Никаких предметов лишних На столе не может быть.
- 20. При работе с ЭВМ Нельзя ходить по классу всем.
- 21. Как здорово! Как классно! Работать на компьютере. Чтоб не было опасно, Не лезь к нему вовнутрь.
- 23. Знакомство Что вы ждете от занятий?
- 24. Введение в Lego Mindstorms ev3
- 25. Блок Lego Mindstorms EV3 К нему подключаются двигатели (порты A, B, C, D) и датчики (1,
- 26. Большой сервомотор Соединяется с блоком NXT в порты A, B, C, D Можно регулировать: мощность вращения
- 27. Средний мотор
- 28. Датчик нажатия (Touch sensor) Осязание робота Позволяет “нащупывать” путь (определять, есть ли перед ним препятствие) Может
- 29. Ультразвуковой датчик (Ultrasonic sensor) Работает по принципу локатора летучей мыши. Определяет расстояние до препятствия (от 0
- 30. Датчик света (Color Sensor) Позволяет роботу различать цвета и отличать свет от темноты Определяет уровень освещенности
- 31. Гироскоп Гироскоп— это цифровой датчик, который обнаруживает вращательное движение по одной оси, может определить скорость вращения
- 32. Кабели Используются для соединения двигателей и датчиков с блоком EV3 20 см, 35 см и 50
- 33. Детали робота Балки Штифты Оси Шестеренки Колеса Прочие
- 34. Балки Основные компоненты корпуса робота Делятся на прямые и изогнутые (1 или 2 раза) Меряются по
- 35. Штифты Используются для соединения балок между собой и с другими деталями Бывают: двухмодульные трехмодульные крестообразные
- 36. Оси Используются в основном для соединения вращающихся деталей: двигателей, шестеренок, колес Длина оси меряется в модулях:
- 37. Шестеренки Используются для передачи вращения с двигателя на колеса робота, а также для изменения мощности и
- 38. Колеса Позволяют роботу ехать по сравнительно плоской поверхности Для лучшего сцепления с поверхностью на колеса можно
- 39. Расскажите об интересном роботе!
- 41. Скачать презентацию
Немного из истории
В основу слова «робототехника» легло слово «робот», придуманное в
Немного из истории
В основу слова «робототехника» легло слово «робот», придуманное в

Виды робототехники
Строительная
Промышленная
Бытовая
Авиационная
Экстремальная
Военная
Космическая
Подводная
Виды робототехники
Строительная
Промышленная
Бытовая
Авиационная
Экстремальная
Военная
Космическая
Подводная
Законы робототехники
Робот не может причинить вред человеку или своим бездействием допустить,
Законы робототехники
Робот не может причинить вред человеку или своим бездействием допустить,
В 1986 году в романе Роботы и Империя (англ. Robots and
В 1986 году в романе Роботы и Империя (англ. Robots and
Законы объединения
Законы объединения
В грязной обуви, друзья,
В кабинет входить нельзя.
В грязной обуви, друзья,
В кабинет входить нельзя.
В одежде мокрой не входить,
Руки тоже не мочить.
В одежде мокрой не входить,
Руки тоже не мочить.
Начинать работу строго,
С разрешения педагога,
И учтите: Вы в ответе,
За порядок в
Начинать работу строго,
С разрешения педагога,
И учтите: Вы в ответе,
За порядок в
Шнуры, розетки, провода
Не надо трогать никогда.
Шнуры, розетки, провода
Не надо трогать никогда.
Бережливым быть умей,
И по клавишам не бей,
Там учтите этот факт,
Электрический контакт.
Бережливым быть умей,
И по клавишам не бей,
Там учтите этот факт,
Электрический контакт.
Любит мышка, чтобы были
Руки чистыми, сухими.
Лучше здесь не пить, не кушать,
Чтоб
Любит мышка, чтобы были
Руки чистыми, сухими.
Лучше здесь не пить, не кушать,
Чтоб
Если вводишь ты ответ,
А компьютер скажет нет,
По дисплею не стучи,
Лучше правила
Если вводишь ты ответ,
А компьютер скажет нет,
По дисплею не стучи,
Лучше правила
Если сбой дает машина,
Терпение вам необходимо,
Не бывает без проблем
Даже с умной
Если сбой дает машина,
Терпение вам необходимо,
Не бывает без проблем
Даже с умной
Остальное всем известно:
Чтоб не вскакивали с места,
Не кричали, не толкались,
За компьютеры
Остальное всем известно:
Чтоб не вскакивали с места,
Не кричали, не толкались,
За компьютеры

Если где-то заискрит,
Или что-нибудь дымит.
Время попусту не трать –
Нужно учителя позвать.
Если где-то заискрит,
Или что-нибудь дымит.
Время попусту не трать –
Нужно учителя позвать.
По экрану не стучи,
Мышку в руку ты возьми
И что надо покажи.
По экрану не стучи,
Мышку в руку ты возьми
И что надо покажи.
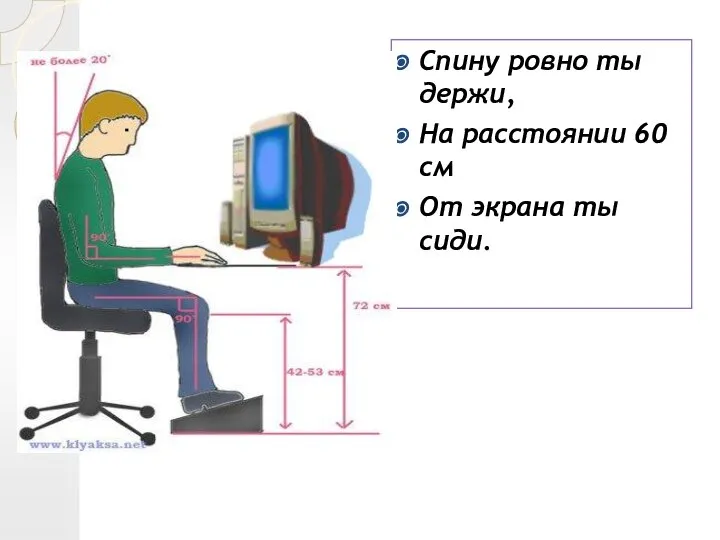
Спину ровно ты держи,
На расстоянии 60 см
От экрана ты сиди.
Спину ровно ты держи,
На расстоянии 60 см
От экрана ты сиди.
За компьютером сидишь,
За дисплеем ты следишь.
Никаких предметов лишних
На столе
За компьютером сидишь,
За дисплеем ты следишь.
Никаких предметов лишних
На столе
При работе с ЭВМ
Нельзя ходить по классу всем.
При работе с ЭВМ
Нельзя ходить по классу всем.
Как здорово! Как классно!
Работать на компьютере.
Чтоб не было опасно,
Не лезь к
Как здорово! Как классно!
Работать на компьютере.
Чтоб не было опасно,
Не лезь к
Знакомство
Что вы ждете от занятий?
Знакомство
Что вы ждете от занятий?

Введение в Lego Mindstorms ev3
Введение в Lego Mindstorms ev3

Блок Lego Mindstorms EV3
К нему подключаются двигатели (порты A, B, C,
Блок Lego Mindstorms EV3
К нему подключаются двигатели (порты A, B, C,
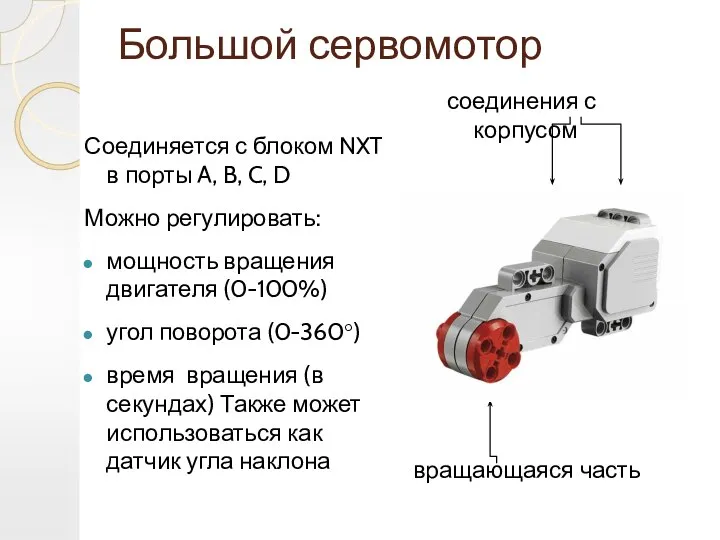
Большой сервомотор
Соединяется с блоком NXT в порты A, B, C, D
Можно
Большой сервомотор
Соединяется с блоком NXT в порты A, B, C, D
Можно

Средний мотор
Средний мотор

Датчик нажатия (Touch sensor)
Осязание робота
Позволяет “нащупывать” путь (определять, есть ли перед
Датчик нажатия (Touch sensor)
Осязание робота
Позволяет “нащупывать” путь (определять, есть ли перед

Ультразвуковой датчик
(Ultrasonic sensor)
Работает по принципу локатора летучей мыши. Определяет расстояние
Ультразвуковой датчик
(Ultrasonic sensor)
Работает по принципу локатора летучей мыши. Определяет расстояние

Датчик света (Color Sensor)
Позволяет роботу различать цвета и отличать свет от
Датчик света (Color Sensor)
Позволяет роботу различать цвета и отличать свет от
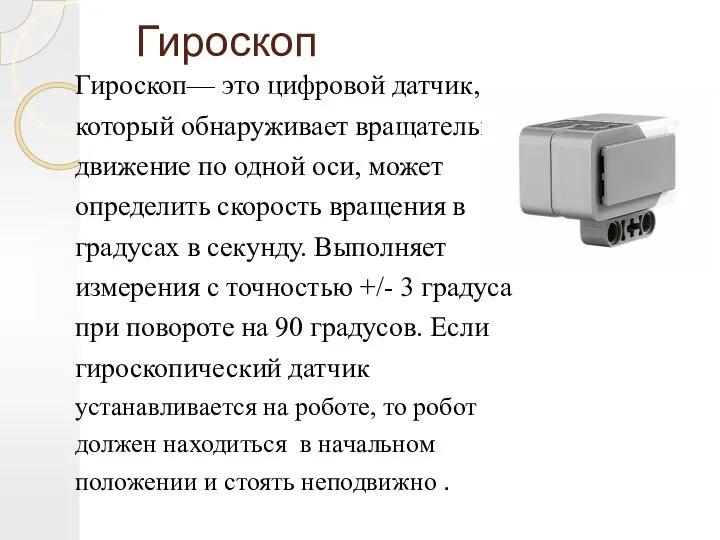
Гироскоп
Гироскоп— это цифровой датчик, который обнаруживает вращательное движение по одной оси,
Гироскоп
Гироскоп— это цифровой датчик, который обнаруживает вращательное движение по одной оси,

Кабели
Используются для соединения двигателей и датчиков с блоком EV3
20 см,
Кабели
Используются для соединения двигателей и датчиков с блоком EV3
20 см,

Детали робота
Балки
Штифты
Оси
Шестеренки
Колеса
Прочие
Детали робота
Балки
Штифты
Оси
Шестеренки
Колеса
Прочие
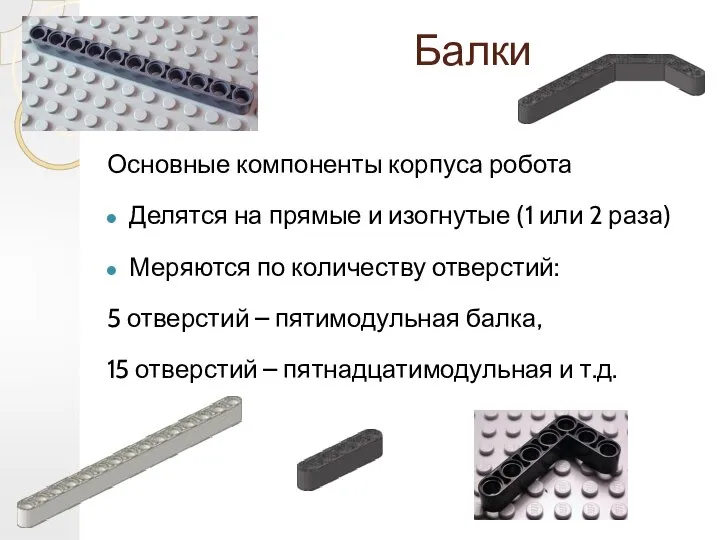
Балки
Основные компоненты корпуса робота
Делятся на прямые и изогнутые (1 или 2
Балки
Основные компоненты корпуса робота
Делятся на прямые и изогнутые (1 или 2

Штифты
Используются для соединения балок между собой и с другими деталями
Бывают:
двухмодульные
трехмодульные
крестообразные
Штифты
Используются для соединения балок между собой и с другими деталями
Бывают:
двухмодульные
трехмодульные
крестообразные
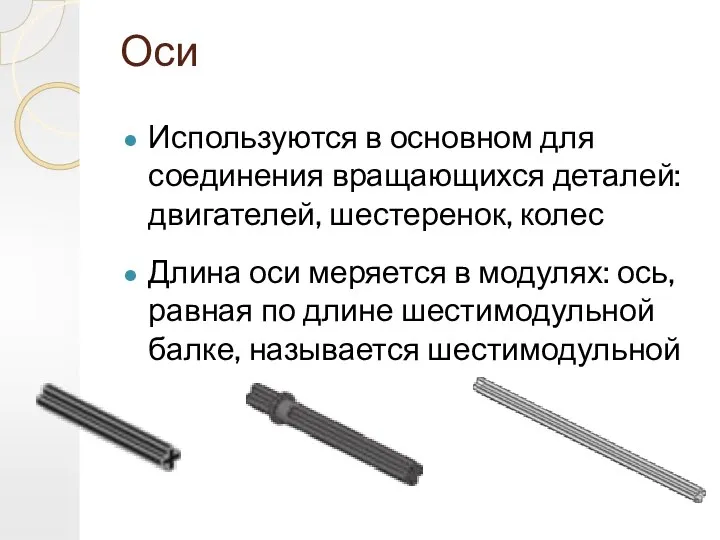
Оси
Используются в основном для соединения вращающихся деталей: двигателей, шестеренок, колес
Длина оси
Оси
Используются в основном для соединения вращающихся деталей: двигателей, шестеренок, колес
Длина оси

Шестеренки
Используются для передачи вращения с двигателя на колеса робота, а также
Шестеренки
Используются для передачи вращения с двигателя на колеса робота, а также

Колеса
Позволяют роботу ехать по сравнительно плоской поверхности
Для лучшего сцепления с поверхностью
Колеса
Позволяют роботу ехать по сравнительно плоской поверхности
Для лучшего сцепления с поверхностью

Расскажите об интересном роботе!
Расскажите об интересном роботе!
 Построение разреза по зданию
Построение разреза по зданию Рисование цветными нитями. Мастер – класс
Рисование цветными нитями. Мастер – класс Земельные участки «Туапсинского цементного завода». Г. Сочи, Адлерский район, с. Веселое. Имеретинская низменность
Земельные участки «Туапсинского цементного завода». Г. Сочи, Адлерский район, с. Веселое. Имеретинская низменность Тема: Девиантное поведение школьников как фактор социальной опасности и его профилактика Выполнил
Тема: Девиантное поведение школьников как фактор социальной опасности и его профилактика Выполнил Политическая власть
Политическая власть Лондонский клуб. Парижский клуб. Региональные валютно-финансовые и кредитные организации европейских, азиатских, африканских
Лондонский клуб. Парижский клуб. Региональные валютно-финансовые и кредитные организации европейских, азиатских, африканских Как подхватить вирус
Как подхватить вирус Трехмерная печать
Трехмерная печать Курсовая работа по теоретической механике «Динамика кулисного механизма»
Курсовая работа по теоретической механике «Динамика кулисного механизма» Анализ данных с применением библиотек Python
Анализ данных с применением библиотек Python Мезенская роспись
Мезенская роспись ОРГАНЫ КРОВЕТВОРЕНИЯ И ИММУННОГЕНЕЗА
ОРГАНЫ КРОВЕТВОРЕНИЯ И ИММУННОГЕНЕЗА Социальные сети как основная модель общения в XXI веке
Социальные сети как основная модель общения в XXI веке Кодирование текстовой информации
Кодирование текстовой информации Неоклассицизм и поздний романтизм
Неоклассицизм и поздний романтизм  Физизческие качества человека
Физизческие качества человека Начертательная геометрия и инженерная графика. Изображения на чертеже - виды, разрезы, сечения
Начертательная геометрия и инженерная графика. Изображения на чертеже - виды, разрезы, сечения Синхронное плавание
Синхронное плавание Презентация Обзор сайта организации ОПЭК (OPEC)
Презентация Обзор сайта организации ОПЭК (OPEC)  Знаменитые иконописцы
Знаменитые иконописцы Лучшие игроки мира за всю историю футбола
Лучшие игроки мира за всю историю футбола Виды ИЗО
Виды ИЗО Разработка бизнесплана ООО «Рем.Тех»
Разработка бизнесплана ООО «Рем.Тех» Кельтская (западноевропейская) мифология: космогония
Кельтская (западноевропейская) мифология: космогония Материнская плата
Материнская плата Олимпийское движение как социальный феномен
Олимпийское движение как социальный феномен БИОХИМИЯ НЕРВНОЙ ТКАНИ-1
БИОХИМИЯ НЕРВНОЙ ТКАНИ-1 Дети глазами родителей Родители глазами детей
Дети глазами родителей Родители глазами детей