- Курсовая работа по теоретической механике «Динамика кулисного механизма»

Содержание
- 2. Расчетная схема и исходные данные Определить: Угловую скорость маховика при его повороте на угол Угловое ускорение
- 3. Этап I. Кинематический анализ механизма. Механизм состоит из трех звеньев. Ведущим является маховик 1, к которому
- 4. Так как То скорость кулисы определится следующей формулой: Скорость центра катка равна скорости кулисы
- 5. Угловую скорость катка находим как отношение скорости его центра к расстоянию до мгновенного цента скоростей Ускорение
- 6. Запись уравнений геометрических связей Интегрируя равенства Получим ,
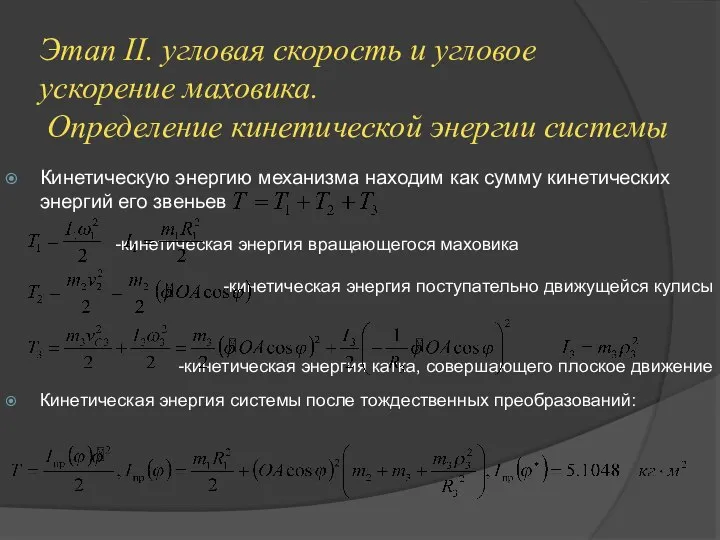
- 7. Этап II. угловая скорость и угловое ускорение маховика. Определение кинетической энергии системы Кинетическую энергию механизма находим
- 8. Определение производной кинетической энергии по времени Определение элементарной работы, мощности внешних сил. Определение работы внешних сил
- 9. Определение угловой скорости маховика при его повороте на угол φ* Для определения угловой скорости маховика применяем
- 10. Определение углового ускорения маховика при его повороте на угол φ*. Воспользуемся теоремой об изменении кинетической энергией
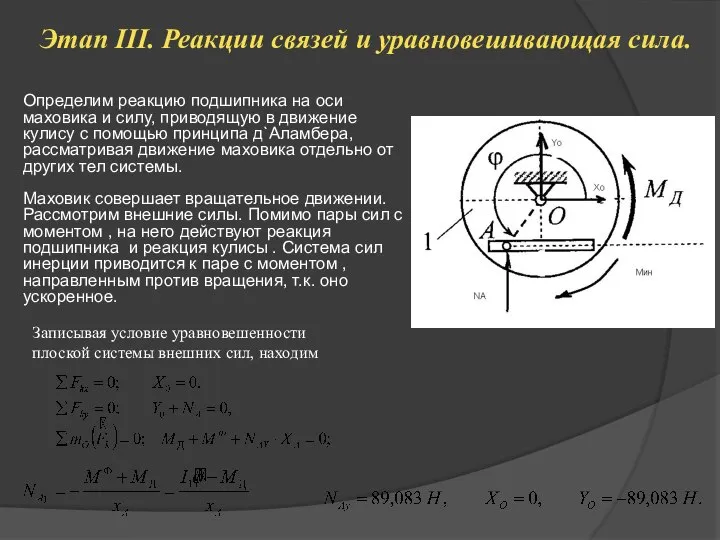
- 11. Этап III. Реакции связей и уравновешивающая сила. Определим реакцию подшипника на оси маховика и силу, приводящую
- 12. Определение силы уравновешивающей кулисный механизм Принцип виртуальных перемещений: Для равновесия механической системы с идеальными и стационарными
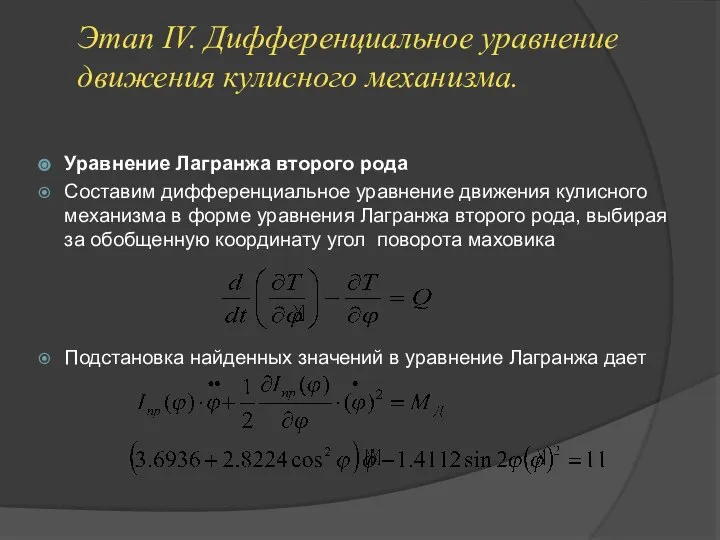
- 13. Этап IV. Дифференциальное уравнение движения кулисного механизма. Уравнение Лагранжа второго рода Составим дифференциальное уравнение движения кулисного
- 14. Уравнение движения машины Машиной называется совокупность твердых тел (звеньев), соединенных между собой так, что положение и
- 16. Скачать презентацию
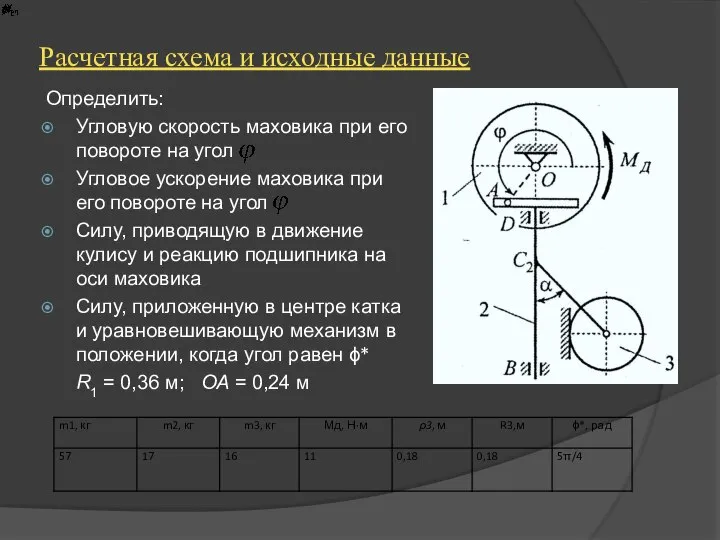
Расчетная схема и исходные данные
Определить:
Угловую скорость маховика при его повороте на
Расчетная схема и исходные данные
Определить:
Угловую скорость маховика при его повороте на
Этап I. Кинематический анализ механизма.
Механизм состоит из трех звеньев. Ведущим
Этап I. Кинематический анализ механизма.
Механизм состоит из трех звеньев. Ведущим
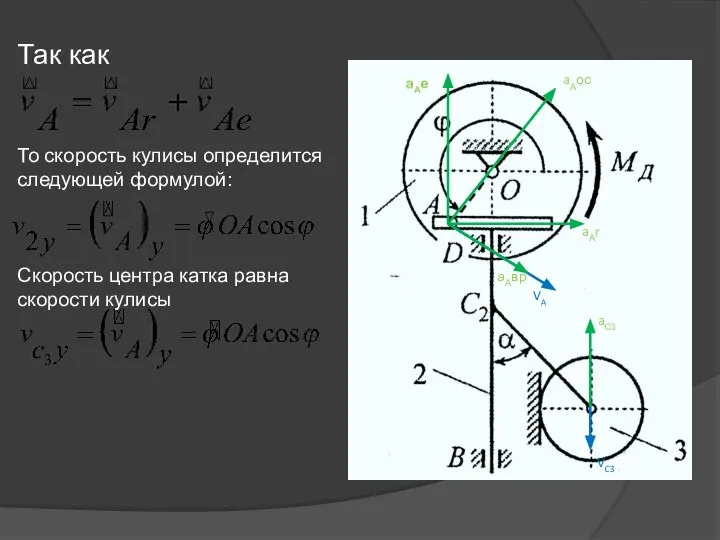
Так как
То скорость кулисы определится следующей формулой:
Скорость центра катка равна
Так как
То скорость кулисы определится следующей формулой:
Скорость центра катка равна
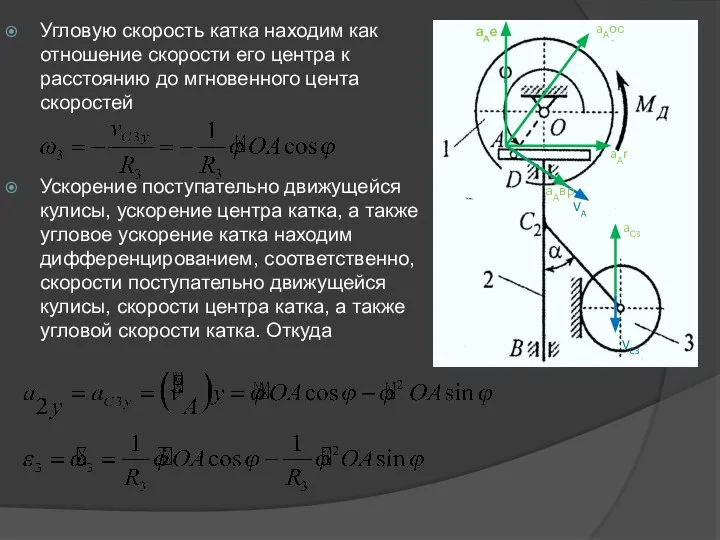
Угловую скорость катка находим как отношение скорости его центра к расстоянию
Угловую скорость катка находим как отношение скорости его центра к расстоянию
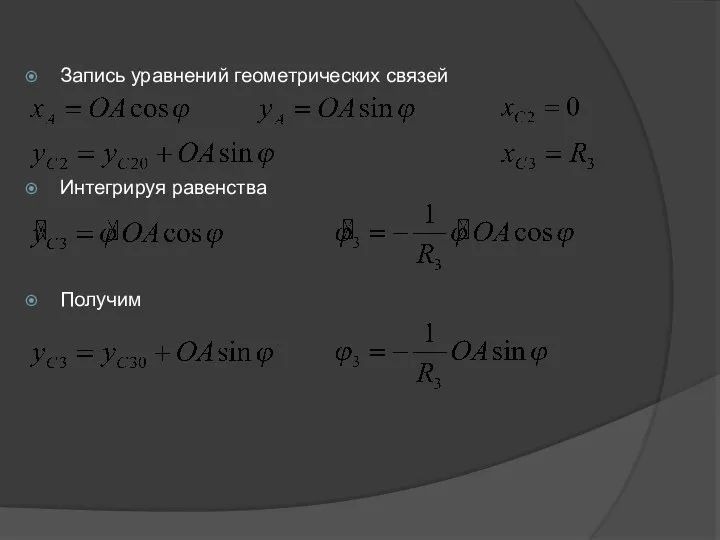
Запись уравнений геометрических связей
Интегрируя равенства
Получим
,
Запись уравнений геометрических связей
Интегрируя равенства
Получим
,
Этап II. угловая скорость и угловое ускорение маховика.
Определение кинетической
Этап II. угловая скорость и угловое ускорение маховика. Определение кинетической
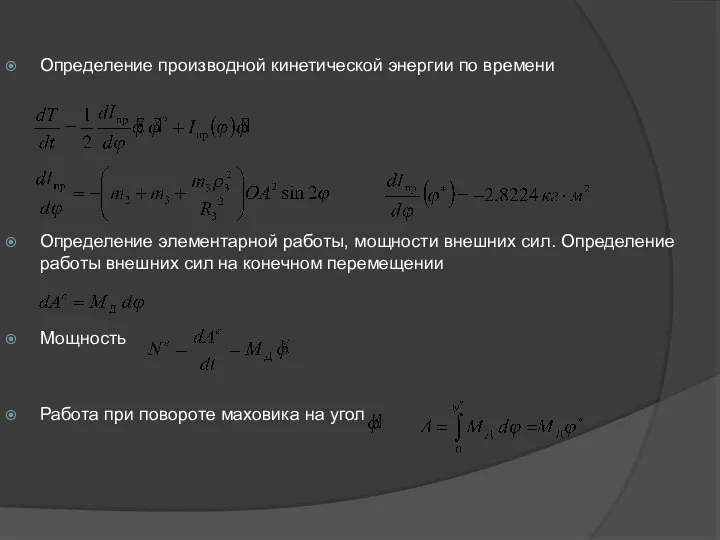
Определение производной кинетической энергии по времени
Определение элементарной работы, мощности внешних сил.
Определение элементарной работы, мощности внешних сил.
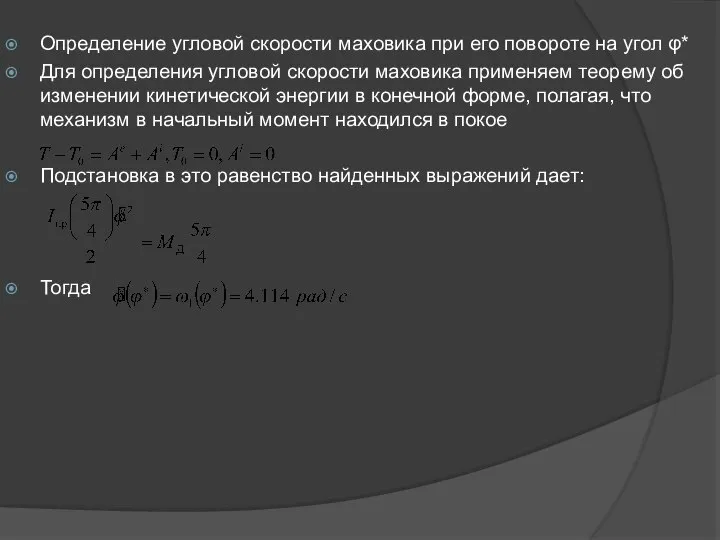
Определение угловой скорости маховика при его повороте на угол φ*
Для определения
Для определения
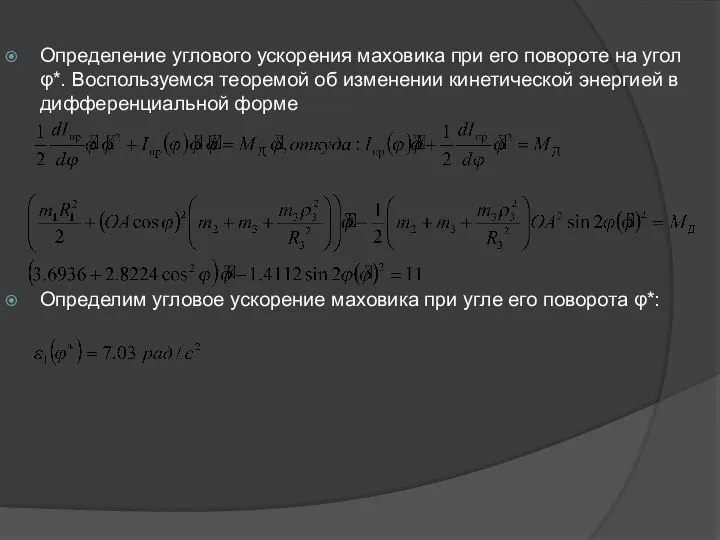
Определение углового ускорения маховика при его повороте на угол φ*. Воспользуемся
Этап III. Реакции связей и уравновешивающая сила.
Определим реакцию подшипника на
Этап III. Реакции связей и уравновешивающая сила.
Определим реакцию подшипника на
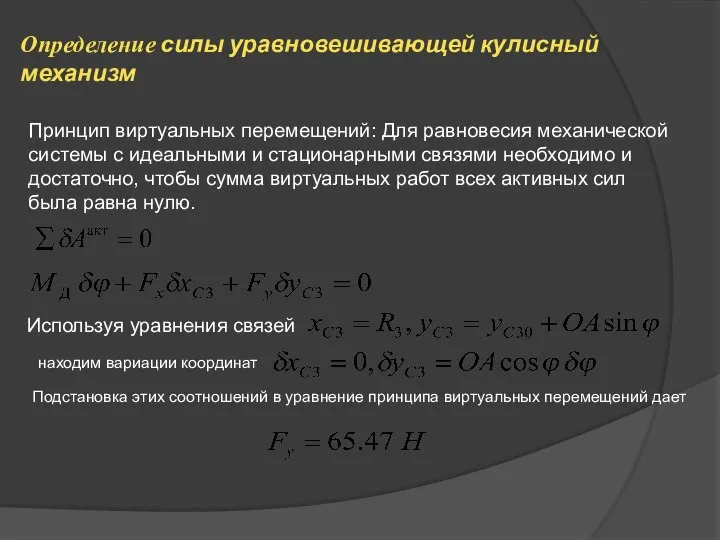
Определение силы уравновешивающей кулисный механизм
Принцип виртуальных перемещений: Для равновесия механической системы
Определение силы уравновешивающей кулисный механизм
Принцип виртуальных перемещений: Для равновесия механической системы
Этап IV. Дифференциальное уравнение движения кулисного механизма.
Уравнение Лагранжа второго рода
Составим дифференциальное
Этап IV. Дифференциальное уравнение движения кулисного механизма.
Уравнение Лагранжа второго рода
Составим дифференциальное
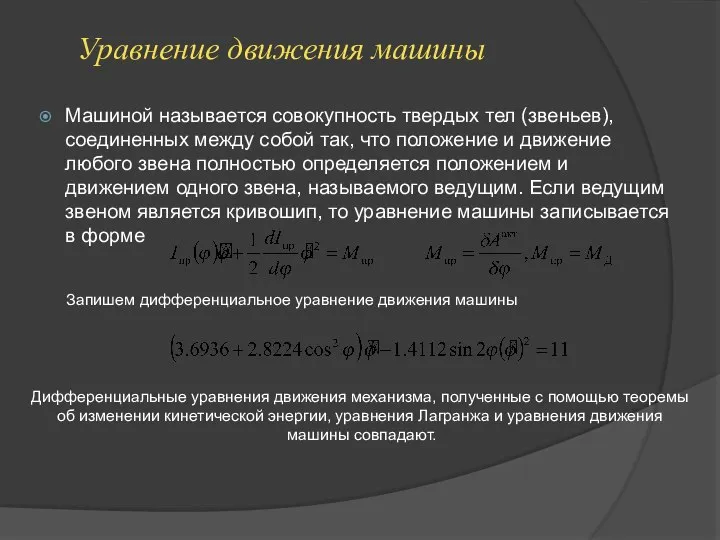
Уравнение движения машины
Машиной называется совокупность твердых тел (звеньев), соединенных между собой
Уравнение движения машины
Машиной называется совокупность твердых тел (звеньев), соединенных между собой
 Презентация Тема: «Цирроз печени»
Презентация Тема: «Цирроз печени»  Пікірсайыс: Американдық парламенттік формат
Пікірсайыс: Американдық парламенттік формат Регуляция дыхания
Регуляция дыхания КАКОЙ БЫВАЕТ РАДУГА
КАКОЙ БЫВАЕТ РАДУГА  История Древнего Китая. Тренажер
История Древнего Китая. Тренажер Презентация "МИРОВОЙ ЭКОНОМИЧЕСКИЙ КРИЗИС" - скачать презентации по Экономике
Презентация "МИРОВОЙ ЭКОНОМИЧЕСКИЙ КРИЗИС" - скачать презентации по Экономике Экономика в XXI веке и обучение специалистов мирового уровня в УдГУ
Экономика в XXI веке и обучение специалистов мирового уровня в УдГУ Саяси ой-пікірдің даму тарихы
Саяси ой-пікірдің даму тарихы День рождения Деда Мороза
День рождения Деда Мороза Ремонт колёсных пар и буксовых узлов
Ремонт колёсных пар и буксовых узлов Антимонопольное регулирование и антимонопольная политика Подготовили: Студенты 2 курса ФТД Группы Т-094 Желтова Виктория, Колес
Антимонопольное регулирование и антимонопольная политика Подготовили: Студенты 2 курса ФТД Группы Т-094 Желтова Виктория, Колес линейные множители
линейные множители Физиология ВНД
Физиология ВНД Маркетинговое исследование тур агентство «Одуванчик» Направления: европейские и азиатские страны Сегмент потребителей: средни
Маркетинговое исследование тур агентство «Одуванчик» Направления: европейские и азиатские страны Сегмент потребителей: средни Клинопись
Клинопись Первые художники земли. (10 класс)
Первые художники земли. (10 класс) Архитектура процессоров. «Структура компьютерных средств» Тема №7. Занятие №2/2
Архитектура процессоров. «Структура компьютерных средств» Тема №7. Занятие №2/2 Футбол. Возникновение и развитие великой игры
Футбол. Возникновение и развитие великой игры Rezultaty_fokus-grupp_po_Ot_i_PB_SRS
Rezultaty_fokus-grupp_po_Ot_i_PB_SRS Новые педагогические технологии и изменение целей и задач образования
Новые педагогические технологии и изменение целей и задач образования Оценка эффективности обучения: как показать ценность руководству и сотрудникам компании «Амплуа-Брокер», ©, 2009
Оценка эффективности обучения: как показать ценность руководству и сотрудникам компании «Амплуа-Брокер», ©, 2009 Родительское собрание «Компьютер – враг, друг, помощник?»
Родительское собрание «Компьютер – враг, друг, помощник?» Сущность предварительно напряженного железобетона
Сущность предварительно напряженного железобетона Системы менеджмента
Системы менеджмента  Дифференцируемая функция. Производная. Дифференциал.
Дифференцируемая функция. Производная. Дифференциал. Глобализация и её последствия
Глобализация и её последствия Проект Редизайн
Проект Редизайн Крыши гражданских зданий
Крыши гражданских зданий