- Характеристика сил, действующих на звенья механизмов

Содержание
- 2. Тема 5 3. Силы тяжести, действующие на все звенья и совершающие как положительную, так и отрицательную
- 3. Тема 5 Способы задания сил, действующих в механизме, могут быть различными в зависимости от назначения и
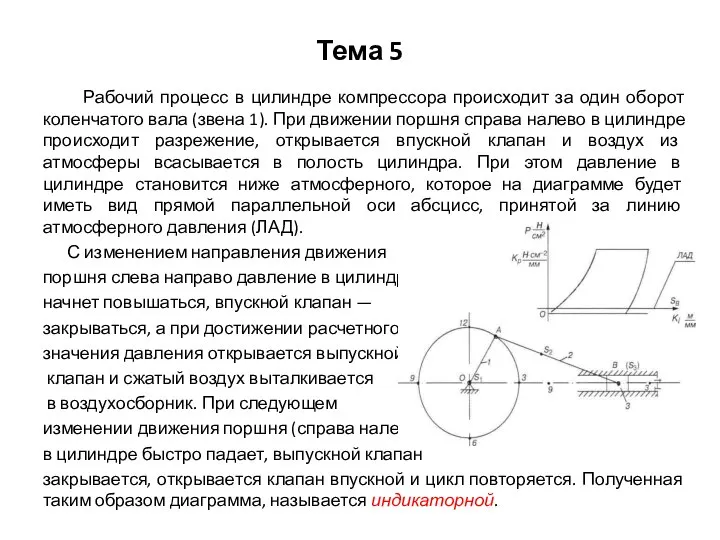
- 4. Тема 5 Рабочий процесс в цилиндре компрессора происходит за один оборот коленчатого вала (звена 1). При
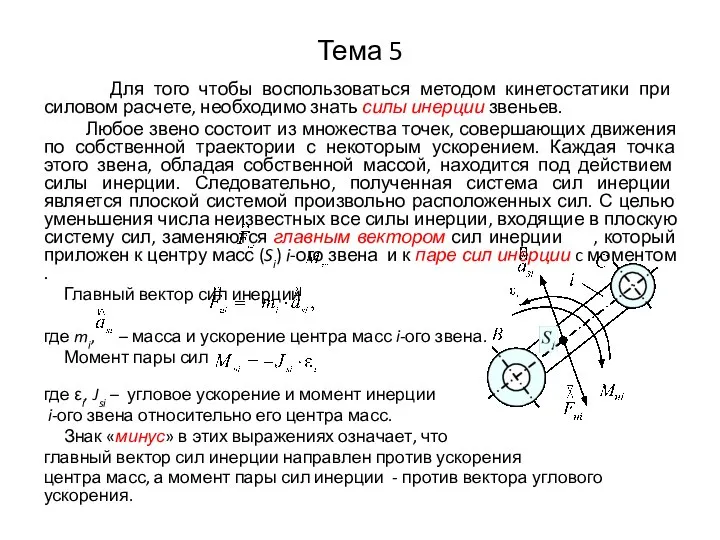
- 5. Тема 5 Для того чтобы воспользоваться методом кинетостатики при силовом расчете, необходимо знать силы инерции звеньев.
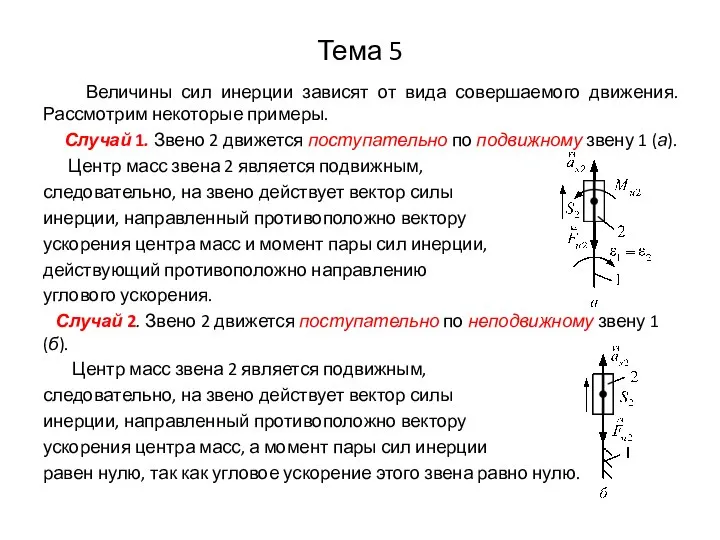
- 6. Тема 5 Величины сил инерции зависят от вида совершаемого движения. Рассмотрим некоторые примеры. Случай 1. Звено
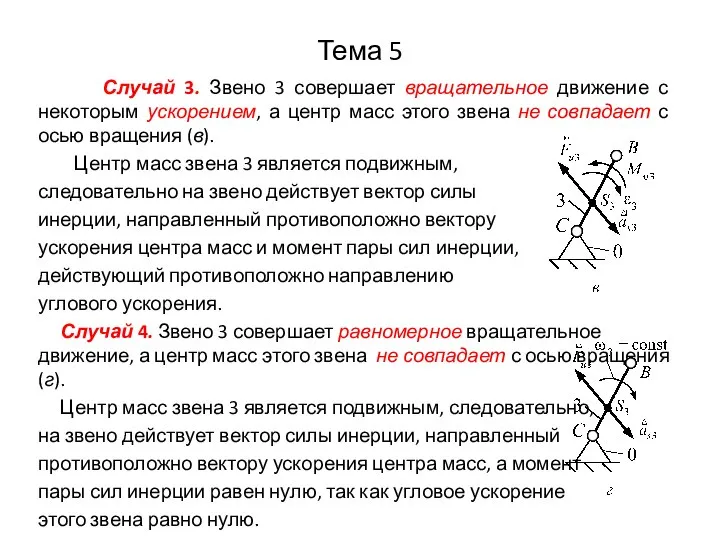
- 7. Тема 5 Случай 3. Звено 3 совершает вращательное движение с некоторым ускорением, а центр масс этого
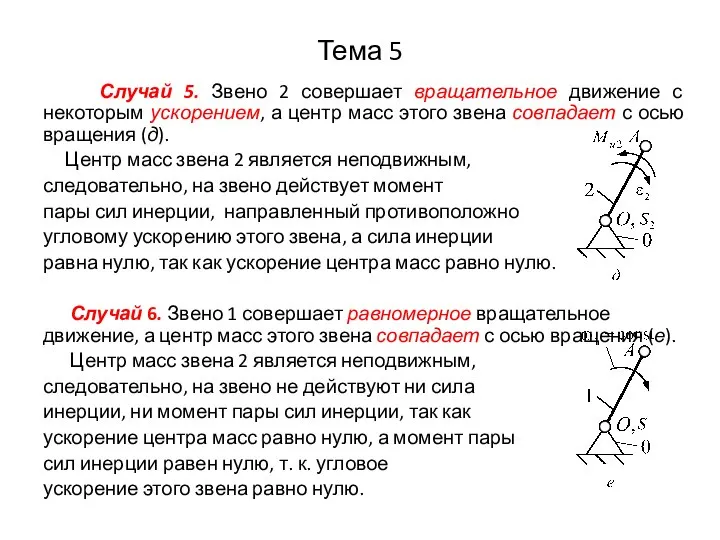
- 8. Тема 5 Случай 5. Звено 2 совершает вращательное движение с некоторым ускорением, а центр масс этого
- 9. Тема 5 5.3. Условия статической определимости кинематической цепи. Выбор метода силового анализа механизмов осуществляется в зависимости
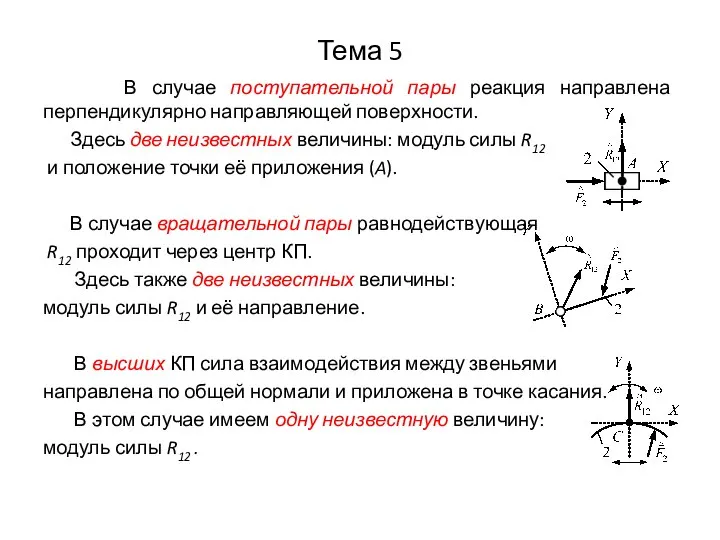
- 10. Тема 5 В случае поступательной пары реакция направлена перпендикулярно направляющей поверхности. Здесь две неизвестных величины: модуль
- 11. Тема 5 Таким образом, в плоских механизмах низшие кинематические пары 5-го класса вносят в уравнения равновесия
- 12. Тема 5 5.4. Порядок кинетостатического анализа механизмов Перед проведением силового анализа проводится структурный анализ, определяется количество
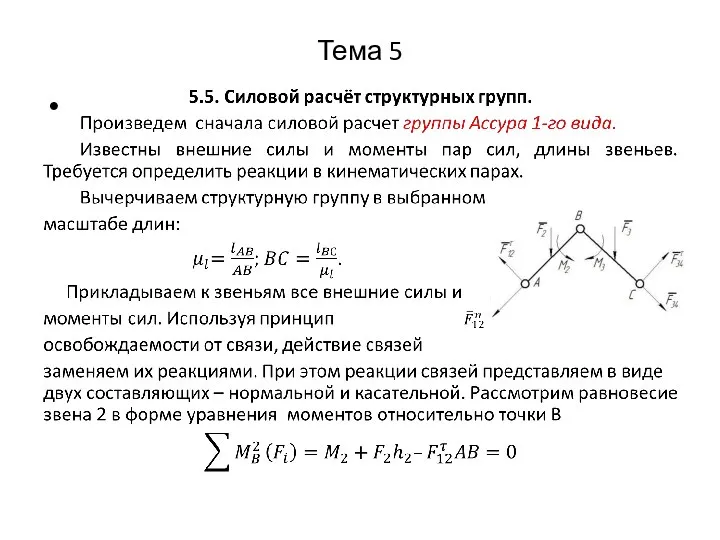
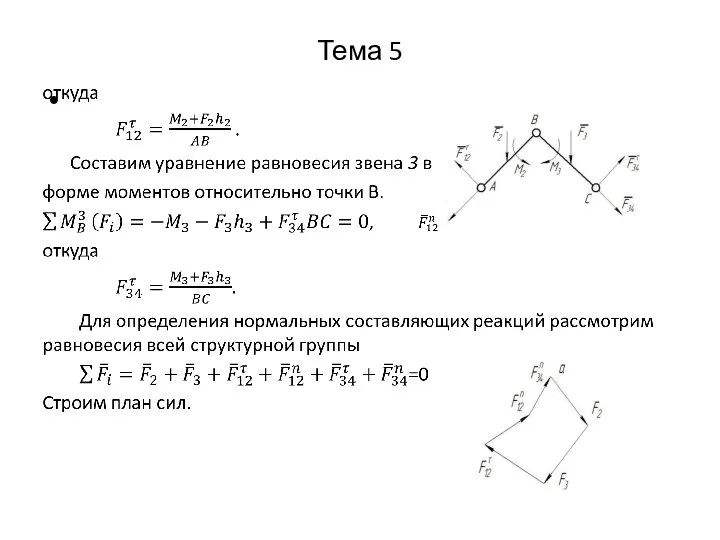
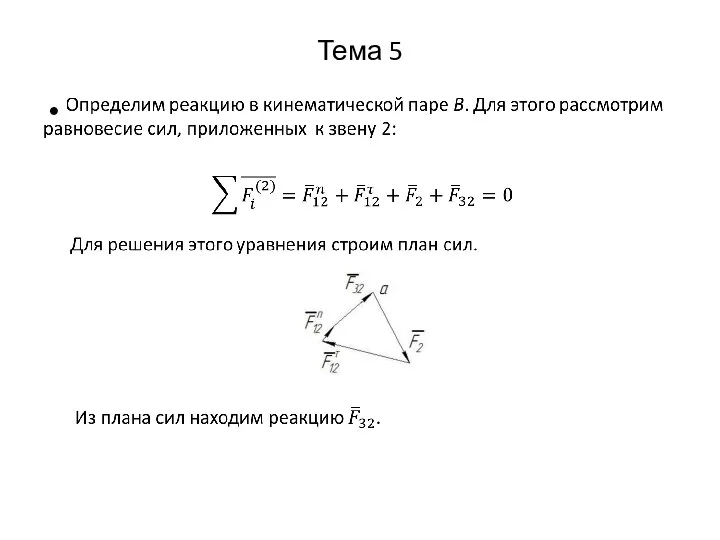
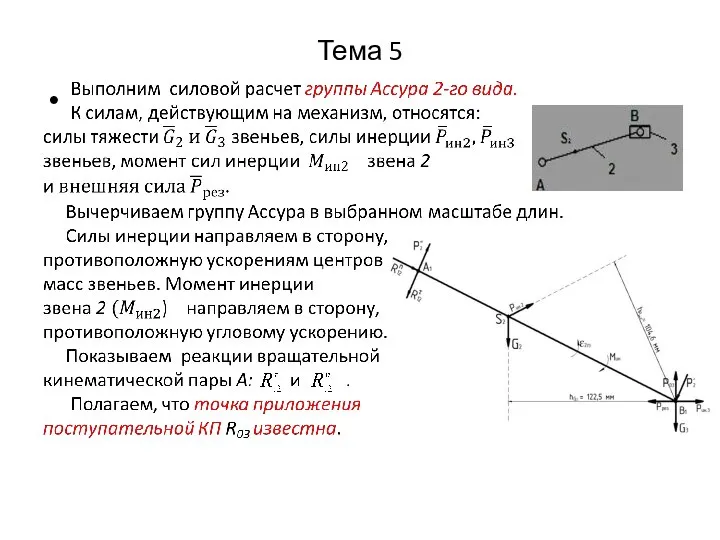
- 13. Тема 5
- 14. Тема 5
- 15. Тема 5
- 16. Тема 5
- 17. Тема 5
- 18. Тема 5
- 19. Тема 5 5.6. Силовой расчет начального звена Силовой расчет начального звена заключается в определении уравновешивающей силы
- 20. Тема 5
- 21. Тема 5
- 22. Тема 5 Порядок силового расчета начального звена 1. Вычертить в выбранном масштабе длин начальный механизм в
- 23. Тема 5
- 24. Тема 5
- 25. Тема 5
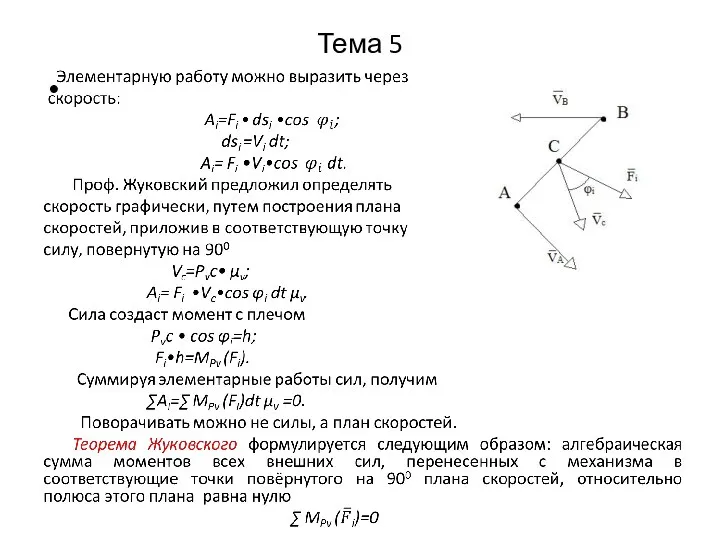
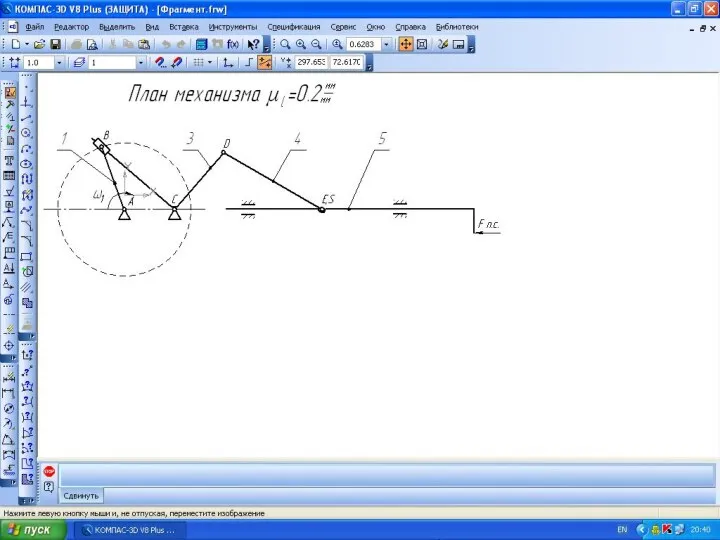
- 26. Тема 5 Приведем пример построения рычага Жуковского для кривошипно-шатунного механизма. Для данного положения механизма в масштабе
- 27. Поскольку механизм имеет кулисную пару, то после построения плана скоростей желательно схематично указать направление поворотного (Кориолисово)
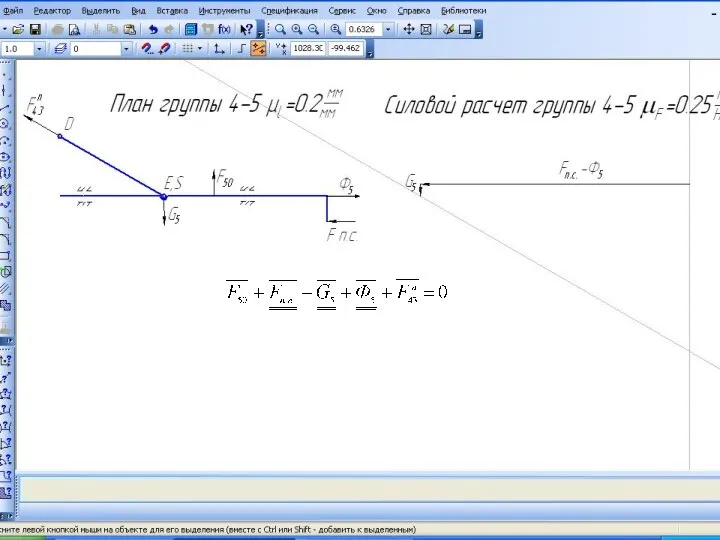
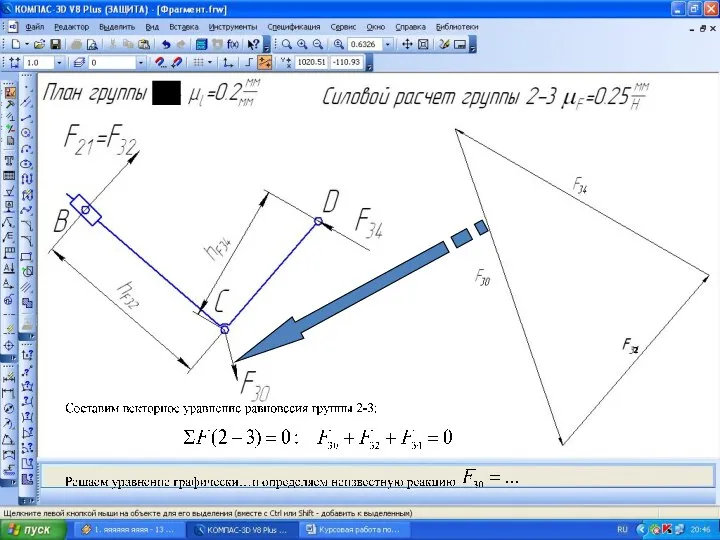
- 29. Определение равнодействующих сил инерции
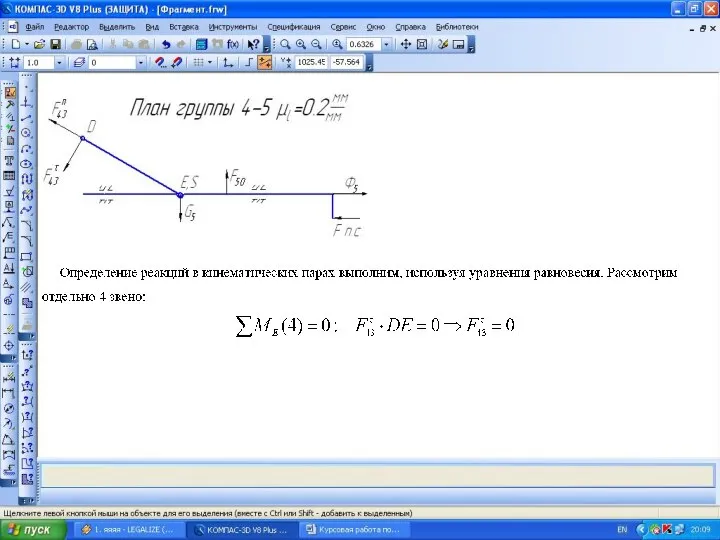
- 34. Обратите внимание на направление этого вектора полученное на плане сил и принятое ранее
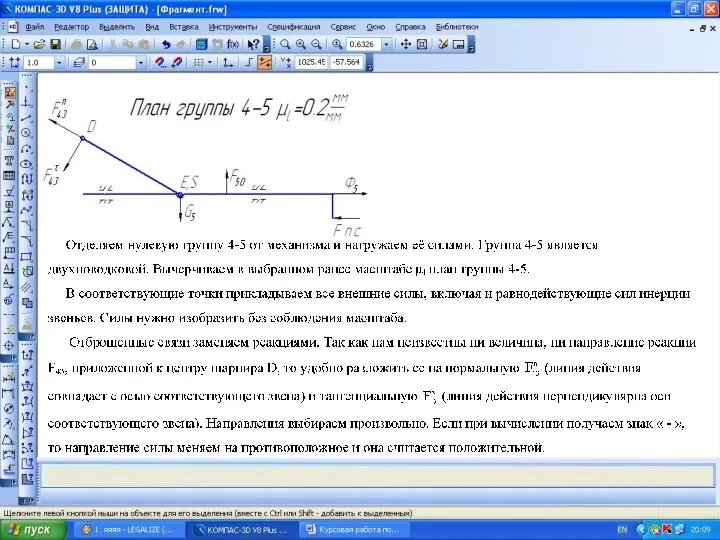
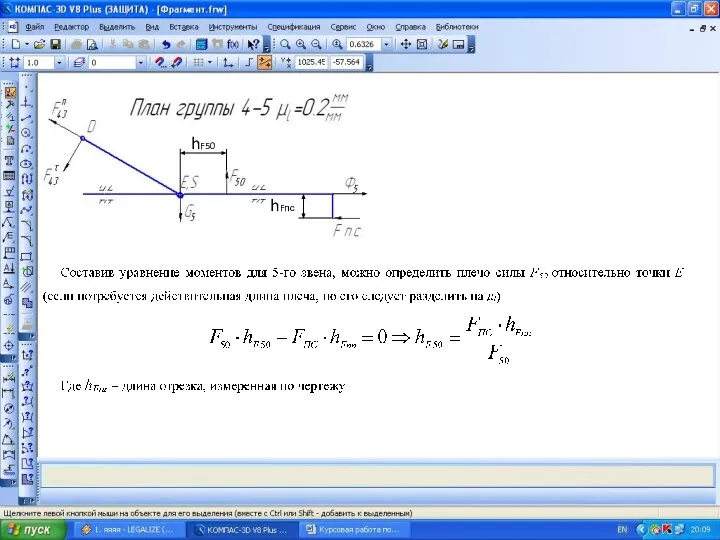
- 35. hFпс hF50
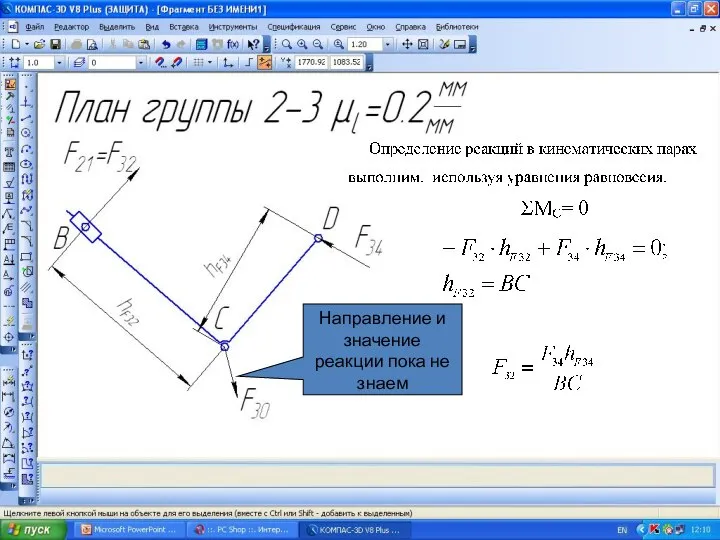
- 36. Направление и значение реакции пока не знаем
- 37. Направление и значение реакции пока не знаем
- 38. 2
- 39. 2
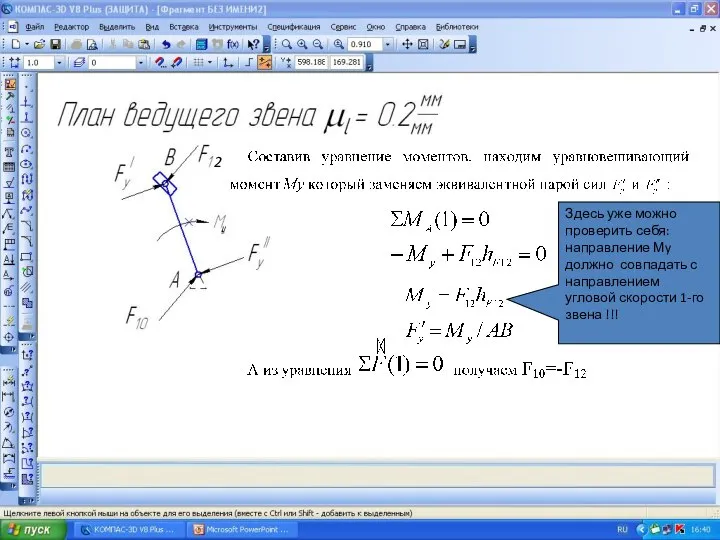
- 40. 2 Здесь уже можно проверить себя: направление Мy должно совпадать с направлением угловой скорости 1-го звена
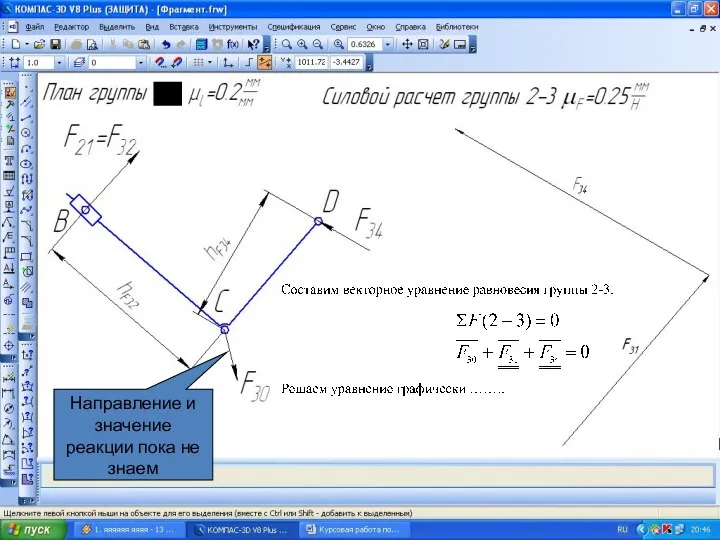
- 41. G5
- 43. Скачать презентацию
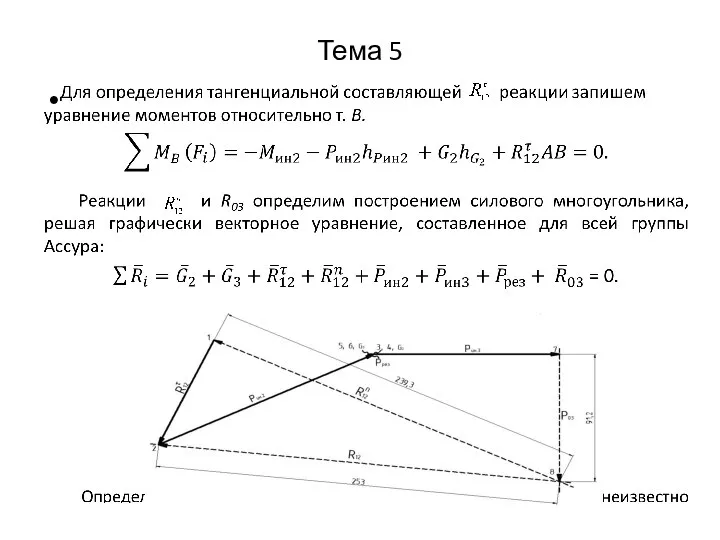
Тема 5
3. Силы тяжести, действующие на все звенья и совершающие
Тема 5
3. Силы тяжести, действующие на все звенья и совершающие
Тема 5
Способы задания сил, действующих в механизме, могут быть различными
Тема 5
Способы задания сил, действующих в механизме, могут быть различными
Тема 5
Рабочий процесс в цилиндре компрессора происходит за один оборот
Тема 5
Рабочий процесс в цилиндре компрессора происходит за один оборот
Тема 5
Для того чтобы воспользоваться методом кинетостатики при силовом расчете,
Тема 5
Для того чтобы воспользоваться методом кинетостатики при силовом расчете,
Тема 5
Величины сил инерции зависят от вида совершаемого движения. Рассмотрим
Тема 5
Величины сил инерции зависят от вида совершаемого движения. Рассмотрим
Тема 5
Случай 3. Звено 3 совершает вращательное движение с некоторым
Тема 5
Случай 3. Звено 3 совершает вращательное движение с некоторым
Тема 5
Случай 5. Звено 2 совершает вращательное движение с некоторым
Тема 5
Случай 5. Звено 2 совершает вращательное движение с некоторым
Тема 5
5.3. Условия статической определимости кинематической цепи.
Выбор метода силового анализа
Тема 5
5.3. Условия статической определимости кинематической цепи.
Выбор метода силового анализа
Тема 5
В случае поступательной пары реакция направлена перпендикулярно направляющей поверхности.
Тема 5
В случае поступательной пары реакция направлена перпендикулярно направляющей поверхности.
Тема 5
Таким образом, в плоских механизмах низшие кинематические пары 5-го
Тема 5
Таким образом, в плоских механизмах низшие кинематические пары 5-го
Тема 5
5.4. Порядок кинетостатического анализа механизмов
Перед проведением силового анализа проводится
Тема 5
5.4. Порядок кинетостатического анализа механизмов
Перед проведением силового анализа проводится
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
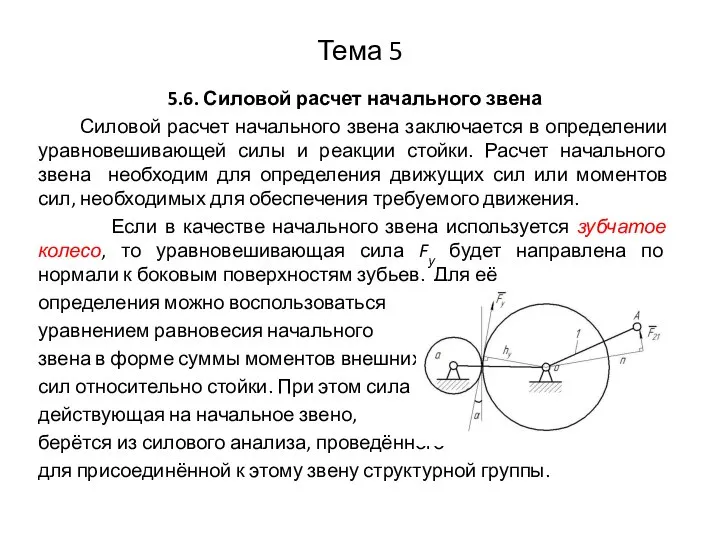
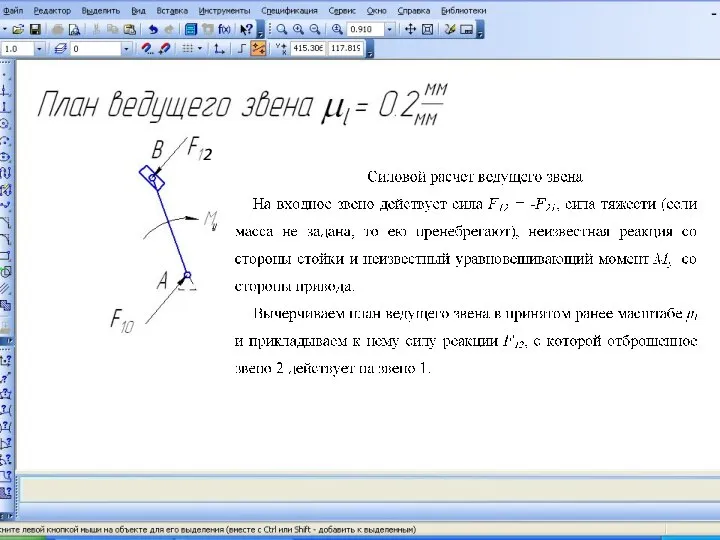
5.6. Силовой расчет начального звена
Силовой расчет начального звена заключается
Тема 5
5.6. Силовой расчет начального звена
Силовой расчет начального звена заключается
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
Порядок силового расчета начального звена
1. Вычертить в выбранном масштабе
Тема 5
Порядок силового расчета начального звена
1. Вычертить в выбранном масштабе
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
Тема 5
Приведем пример построения рычага Жуковского для кривошипно-шатунного механизма. Для
Тема 5
Приведем пример построения рычага Жуковского для кривошипно-шатунного механизма. Для
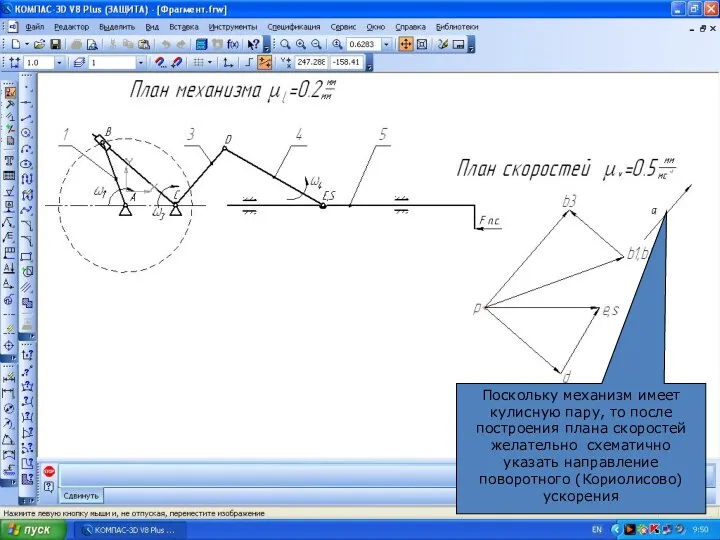
Поскольку механизм имеет кулисную пару, то после построения плана скоростей желательно
Поскольку механизм имеет кулисную пару, то после построения плана скоростей желательно

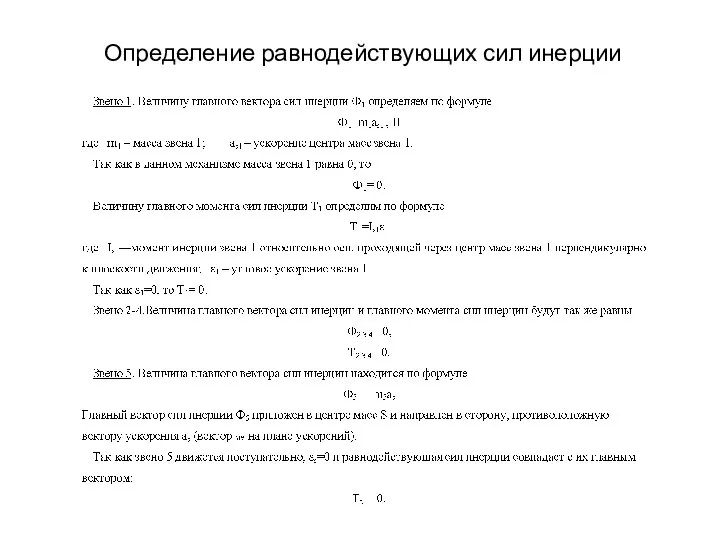
Определение равнодействующих сил инерции
Определение равнодействующих сил инерции

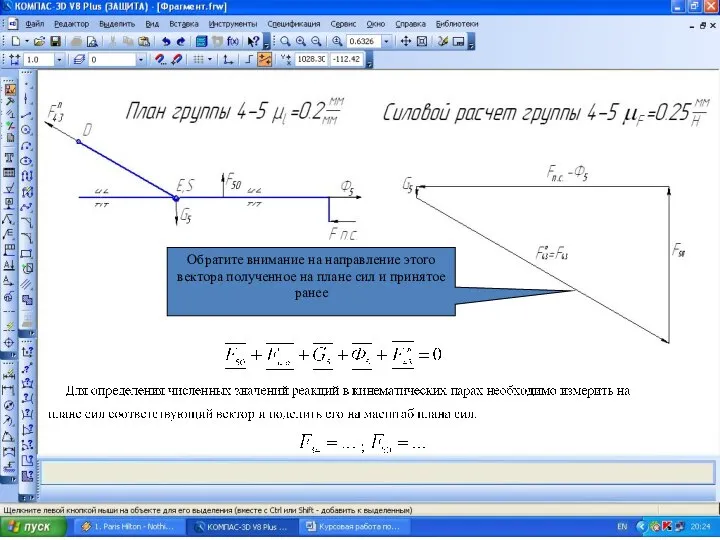
Обратите внимание на направление этого вектора полученное на плане сил и
Обратите внимание на направление этого вектора полученное на плане сил и
hFпс
hF50
hFпс
hF50
Направление и значение реакции пока не знаем
Направление и значение реакции пока не знаем
Направление и значение реакции пока не знаем
Направление и значение реакции пока не знаем
2
2
2
2
2
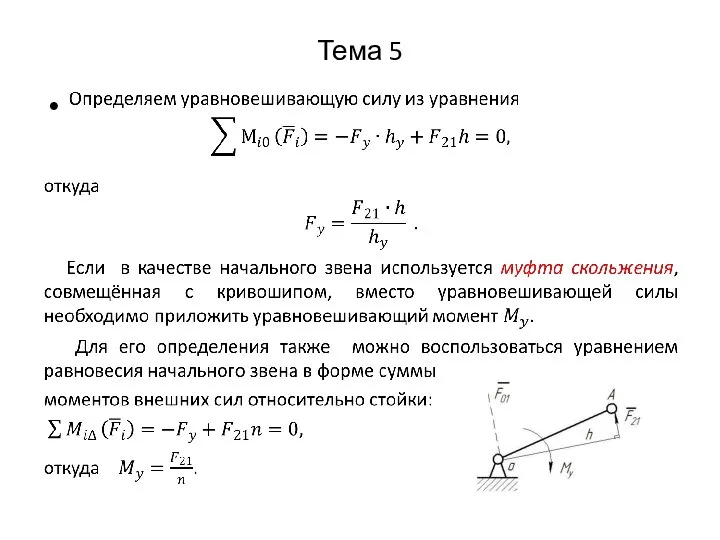
Здесь уже можно проверить себя: направление Мy должно совпадать с направлением
2
Здесь уже можно проверить себя: направление Мy должно совпадать с направлением
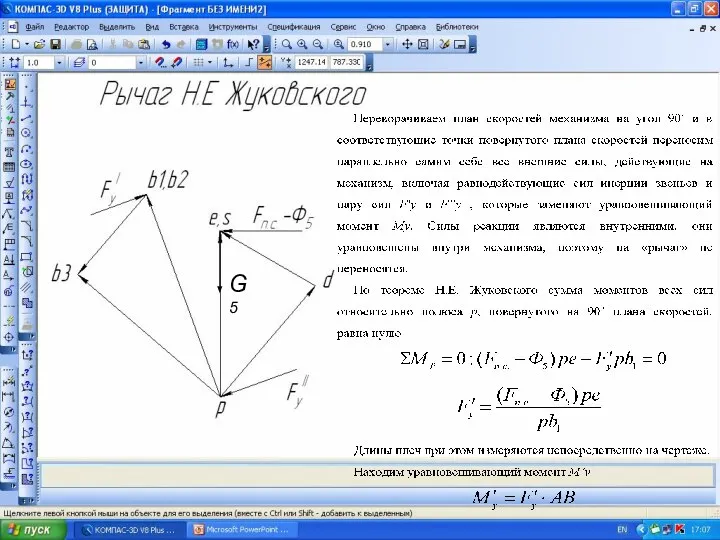
G5
G5
 Дифракция света
Дифракция света  Социальные группы
Социальные группы Стиль модерн
Стиль модерн Скульптура ацтеков
Скульптура ацтеков Зачем нам нужен телефон и телевизор. Школа АБВ
Зачем нам нужен телефон и телевизор. Школа АБВ Усилители электрических сигналов. Классификация усилителей. Основные технические характеристики. (Лекция 2)
Усилители электрических сигналов. Классификация усилителей. Основные технические характеристики. (Лекция 2) Adjective-1
Adjective-1 Преступность и ее основные характеристики
Преступность и ее основные характеристики Периметрия
Периметрия 01.03 Игра Рыбка Одноходовка
01.03 Игра Рыбка Одноходовка Технологии устройства кровель. (Тема 4)
Технологии устройства кровель. (Тема 4) Налоги
Налоги  Процессоры от зарождения до наших дней
Процессоры от зарождения до наших дней Характеристика последствий антропогенного воздействия на окружающую природную среду
Характеристика последствий антропогенного воздействия на окружающую природную среду  Дифференциальная диагностика детей с ОНР и другими нарушениями
Дифференциальная диагностика детей с ОНР и другими нарушениями Выполнила работу: Козлова Полина ученица 3 «А» кл.МОУ СОШ №1 Руководитель:
Выполнила работу: Козлова Полина ученица 3 «А» кл.МОУ СОШ №1 Руководитель: Воинские и военные преступления
Воинские и военные преступления  Лазерная очистка поверхности
Лазерная очистка поверхности  Разработка проекта IP - видеонаблюдения
Разработка проекта IP - видеонаблюдения Spring teplates. Thymeleaf & spring framework
Spring teplates. Thymeleaf & spring framework Масленица
Масленица Урок – обобщения: Различные действия с дробями.
Урок – обобщения: Различные действия с дробями. Управленческие решения в системе управления. Лекция 4
Управленческие решения в системе управления. Лекция 4 Презентация на тему: Фольклор
Презентация на тему: Фольклор Сеть фургонов и бистро Good moming. Бизнес-план
Сеть фургонов и бистро Good moming. Бизнес-план Детская школа искусств
Детская школа искусств Апелляция. Апелляционное производство
Апелляция. Апелляционное производство Энзимопатии Энзимодиагностика Энзимотерапия
Энзимопатии Энзимодиагностика Энзимотерапия