- Задача силового анализа действующих на механизм

Содержание
- 2. Определение уравновешивающей силы методом построения планов сил Всякий механизм, обладающий одной степенью подвижности и находящийся под
- 3. Задачей силового анализа механизма является определение сил, действующих на звенья механизма, реакций в кинематических парах и
- 4. Находить неизвестные реакции в кинематических парах, можно пользуясь уравнениями статики, поэтому такой силовой анализ называется кинетостатическим.
- 5. Определим реакции в кинематический парах R12;R23;R01;R03 и уравновешивающий момент для механизма двигателя Му. Известными величинами являются:
- 6. Произведем силовой анализ кривошипно-ползунного механизма двигателя внутреннего сгорания для заданного положения. Определение сил тяжести звеньев Силы
- 7. Площадь поперечного сечения цилиндра Сила давления газов на поршень В Определение результирующих сил инерции Сила инерции
- 8. Определение силы давления газов на поршень Теоретическая (пунктир) и действительная (сплошные линии) индикаторные диаграммы 4—тактного двигателя:
- 9. Силовой анализ группы Ассура 2-3 принцип Даламбера: систему можно рассматривать без нарушения движения или покоя, если
- 10. Выбирается масштабный коэффициент для построения: где Fmax – величина наибольшей силы; f - длина отрезка, который
- 11. Силовой анализ ведущего звена (кривошипа)
- 13. Скачать презентацию
Определение уравновешивающей силы методом построения планов сил
Всякий механизм, обладающий одной степенью
Определение уравновешивающей силы методом построения планов сил
Всякий механизм, обладающий одной степенью
Задачей силового анализа механизма является определение сил, действующих на звенья механизма,
Задачей силового анализа механизма является определение сил, действующих на звенья механизма,
Находить неизвестные реакции в кинематических парах, можно пользуясь уравнениями статики, поэтому
Находить неизвестные реакции в кинематических парах, можно пользуясь уравнениями статики, поэтому
Определим реакции в кинематический парах R12;R23;R01;R03 и уравновешивающий момент для механизма
Определим реакции в кинематический парах R12;R23;R01;R03 и уравновешивающий момент для механизма
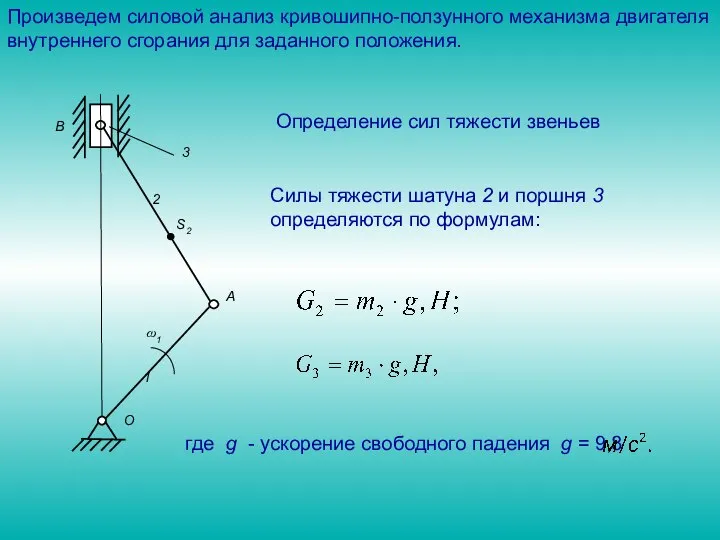
Произведем силовой анализ кривошипно-ползунного механизма двигателя внутреннего сгорания для заданного положения.
Произведем силовой анализ кривошипно-ползунного механизма двигателя внутреннего сгорания для заданного положения.
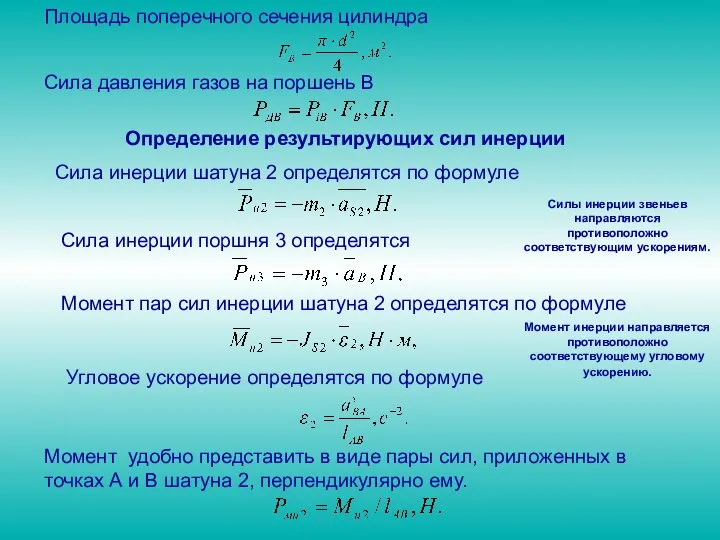
Площадь поперечного сечения цилиндра
Сила давления газов на поршень В
Определение результирующих сил
Площадь поперечного сечения цилиндра
Сила давления газов на поршень В
Определение результирующих сил
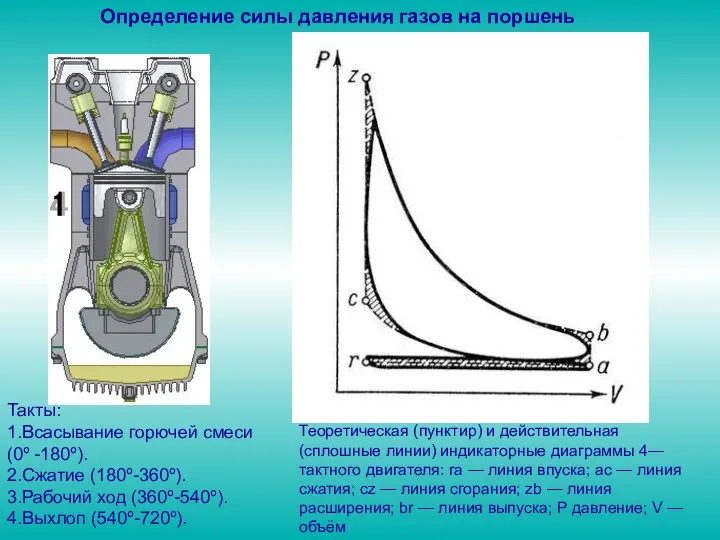
Определение силы давления газов на поршень
Теоретическая (пунктир) и действительная (сплошные линии)
Определение силы давления газов на поршень
Теоретическая (пунктир) и действительная (сплошные линии)
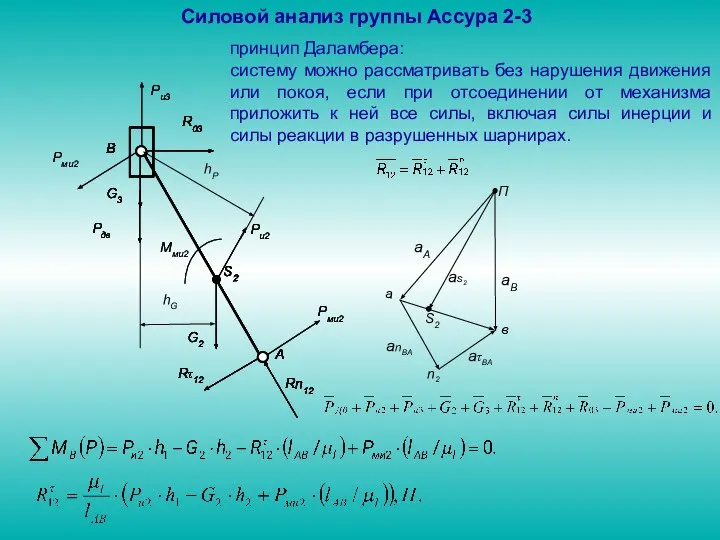
Силовой анализ группы Ассура 2-3
принцип Даламбера:
систему можно рассматривать без нарушения движения
Силовой анализ группы Ассура 2-3
принцип Даламбера:
систему можно рассматривать без нарушения движения
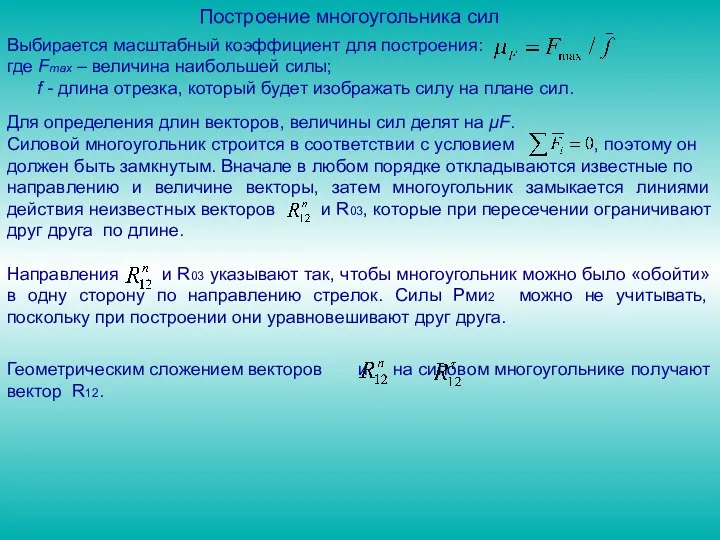
Выбирается масштабный коэффициент для построения:
где Fmax – величина наибольшей силы;
f
Выбирается масштабный коэффициент для построения:
где Fmax – величина наибольшей силы;
f
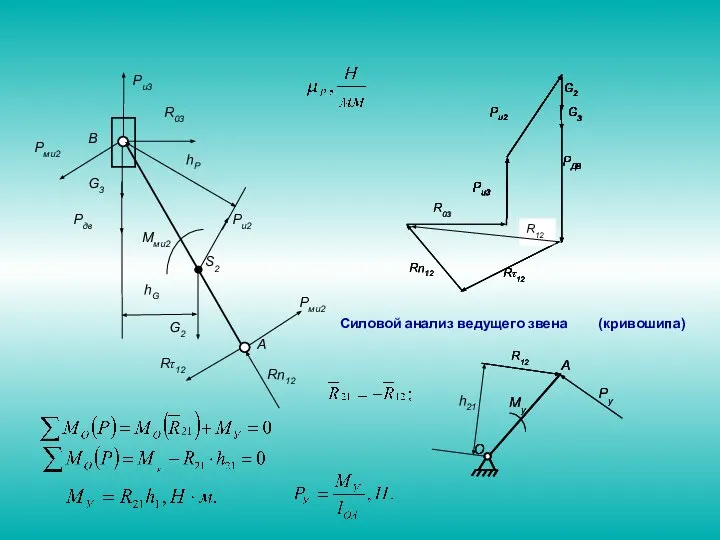
Силовой анализ ведущего звена (кривошипа)
Силовой анализ ведущего звена (кривошипа)
 Природные зоны России.
Природные зоны России. Сравнение старого УК и нового УК КР
Сравнение старого УК и нового УК КР Информационная модель ЛДП
Информационная модель ЛДП Презентация "Виды рынков. Конкуренция и монополия" - скачать презентации по Экономике
Презентация "Виды рынков. Конкуренция и монополия" - скачать презентации по Экономике Русская православная церковь в XV-начале XVI в
Русская православная церковь в XV-начале XVI в Великие Физиологи
Великие Физиологи Непрезентация InSales. Мы продаём тележки! Переползание долины смерти. - презентация
Непрезентация InSales. Мы продаём тележки! Переползание долины смерти. - презентация Физическая реабилитация в клинике внутренних болезней
Физическая реабилитация в клинике внутренних болезней Создание сети платежных терминалов для Банка Предложение компании «Предпроцессинг» (Predprocessing)
Создание сети платежных терминалов для Банка Предложение компании «Предпроцессинг» (Predprocessing)  Женщины-спортсменки 20 века
Женщины-спортсменки 20 века Өндірістік және құрылыс салаларында қолдануға арналған қылқан жапырақ тұқымды дөңгелекағаш материалдары
Өндірістік және құрылыс салаларында қолдануға арналған қылқан жапырақ тұқымды дөңгелекағаш материалдары Гжель
Гжель Диоды Ганна
Диоды Ганна Миссионерство среди «захожан»
Миссионерство среди «захожан» Методы исследования электрической активности сердца
Методы исследования электрической активности сердца Методическая разработка занятия по искусству Автор:кульдышева А.,1 курс,группа 105а,мпгу Преподаватель: гудилина С.и. 2015
Методическая разработка занятия по искусству Автор:кульдышева А.,1 курс,группа 105а,мпгу Преподаватель: гудилина С.и. 2015  Пакет расширений SymMесhanics
Пакет расширений SymMесhanics Презентация "Центр-инвест" - скачать презентации по Экономике
Презентация "Центр-инвест" - скачать презентации по Экономике Психостимуляторы Аналептики
Психостимуляторы Аналептики ГОТИЧЕСКОЕ ИСКУССТВО
ГОТИЧЕСКОЕ ИСКУССТВО  СЕМИОТИКА И ДИАГНОСТИКА УРОЛОГИЧЕСКИХ ЗАБОЛЕВАНИЙ КАФЕДРА УРОЛОГИИ И АНДРОЛОГИИ ХГМУ
СЕМИОТИКА И ДИАГНОСТИКА УРОЛОГИЧЕСКИХ ЗАБОЛЕВАНИЙ КАФЕДРА УРОЛОГИИ И АНДРОЛОГИИ ХГМУ Химия и эволюция
Химия и эволюция  Братство Разума
Братство Разума Економіко-правові аспекти банкрутства та ліквідації підприємства
Економіко-правові аспекти банкрутства та ліквідації підприємства Методы и средства регистрации ионизирующих излучений. Электретные детекторы
Методы и средства регистрации ионизирующих излучений. Электретные детекторы БИОЛОГИЧЕСКОЕ ОКИСЛЕНИЕ
БИОЛОГИЧЕСКОЕ ОКИСЛЕНИЕ Pele “The Greatest Athlete of All Time”
Pele “The Greatest Athlete of All Time” Культура Древнего Рима
Культура Древнего Рима