- Авиационные управляемые средства поражения

Содержание
- 2. Авиационные управляемые ракеты
- 3. Общая характеристика авиационных управляемых средств поражения (АУСП) 1. Назначение, состав АУСП 2. Классификация АУСП 3. Основные
- 4. ПрНС СУВ Авиационное вооружение АСП АНСП Установки АВ СНО АУСП ПАТРОНЫ
- 5. Функциональная схема типовой АУР Двигательная установка Система энергоснабжения Электросистема Система создания управляющей силы Боевая часть Взрывательное
- 6. Предназначение составных частей АУР Боевая часть - предназначена для нанесения ущерба цели при воздействии на цель
- 7. БЧ для поражения наземных целей осколочно - фугасная фугасная кумулятивная фугасно - кумулятивная кумулятивно - осколочно
- 8. Взрывательное устройство - обеспечивает подрыв боевой части. Состав взрывательного устройства контактный взрыватель неконтактный взрыватель предохранительно-исполнительный механизм
- 9. Система управления (СУ) и система создания управляющей силы (ССУС) предназначены для вывода ракеты в точку встречи
- 10. Двигательная установка ракеты предназначена для создания силы тяги, в результате действия которой обеспечивается необходимая скорость полета
- 11. Система энергоснабжения обеспечивает энергией все системы ракеты после пуска. Системы энергоснабжения бортовые источники электроэнергии пневмосистема гидросистема
- 12. Электросистема предназначена для объединения всех систем и агрегатов ракеты в единый функционирующий механизм связь систем АУР
- 13. 2. Классификация авиационных управляемых ракет АУР классифицируются по: месту расположения цели; назначению; дальности стрельбы; типу системы
- 14. По месту расположения целей АУР класса "воздух- воздух" АУР класса “воздух-поверхность”
- 15. По назначению: тактические; оперативно-тактические; стратегические. АУР «В-В» АУР «В-П» тактические стратегические оперативно-тактические
- 16. По дальности стрельбы: АУР класса « воздух-воздух» Малой дальности ( Средней дальности ( Большой дальности (
- 17. По дальности стрельбы: АУР класса «воздух - поверхность» Малой дальности ( Средней дальности ( Большой дальности
- 18. По типу системы управления: автономного управления телеуправления самонаведения комбинированная
- 19. По способу создания управляющей силы: аэродинамическая газодинамическая аэрогазодинамическая
- 20. Аэродинамические схемы ракет Нормальная Элевонная (безхвостка) Обратная (утка) С поворотным крылом
- 21. 3. Основные характеристики авиационных управляемых ракет Тактико-технические характеристики АУР: назначение; типы ЛА, с которых применяются АУР;
- 22. Эксплуатационные характеристики АУР: состояние поставки от предприятий промышленности; допустимые условия эксплуатации; гарантийный ресурс; межрегламентный ресурс; тип
- 23. 4. Методы наведения АУР Методы наведения самонаводящихся АУР: прямого наведения; погони (флюгерный); наведение с заданным углом
- 24. Схема основных векторных величин, определяющих положение центра масс АУР
- 25. - скорость ракеты; - вектор дальности до цели; - строительная ось ракеты; - угол, определяющий положение
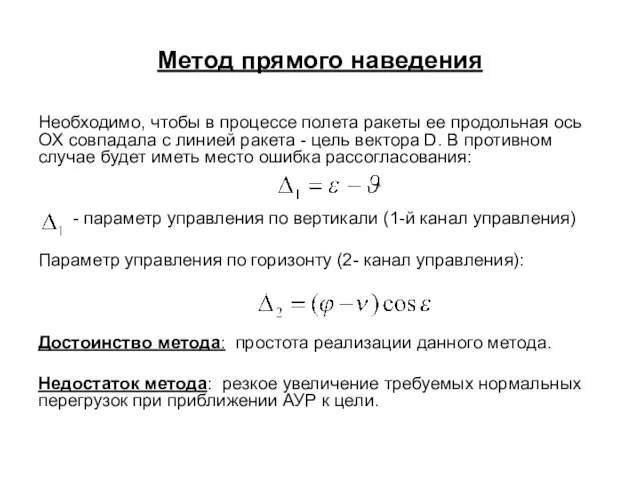
- 26. Метод прямого наведения Необходимо, чтобы в процессе полета ракеты ее продольная ось OX совпадала с линией
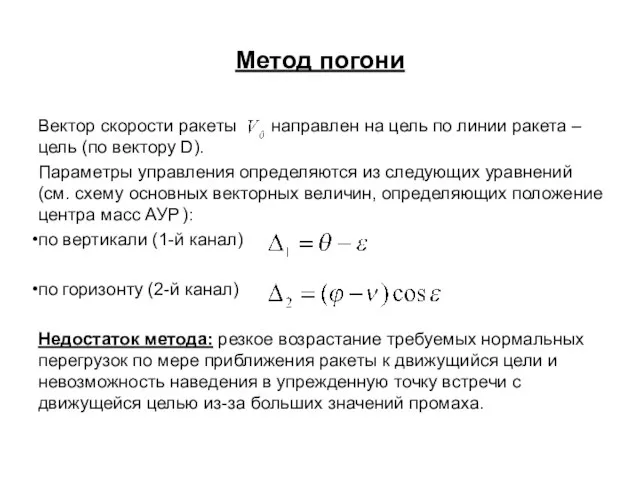
- 27. Метод погони Вектор скорости ракеты направлен на цель по линии ракета – цель (по вектору D).
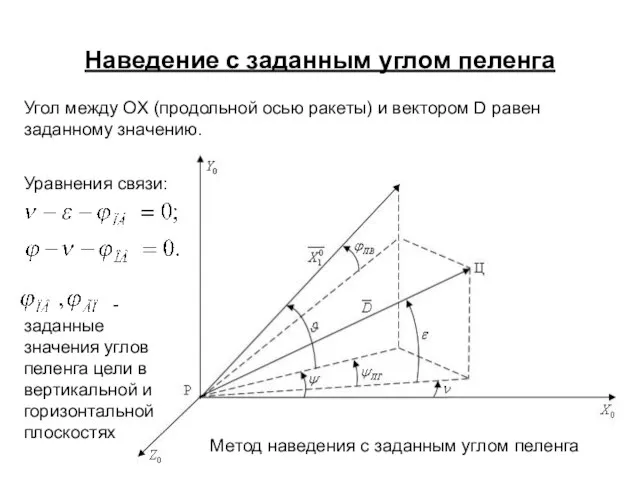
- 28. Наведение с заданным углом пеленга Угол между OX (продольной осью ракеты) и вектором D равен заданному
- 29. Метод пропорционального наведения Скалярные уравнения связи: Вектор D в процессе наведения ракеты не должен вращаться. Схема
- 31. Скачать презентацию
Авиационные управляемые ракеты
Авиационные управляемые ракеты
Общая характеристика авиационных управляемых средств поражения (АУСП)
1. Назначение, состав АУСП
2. Классификация
Общая характеристика авиационных управляемых средств поражения (АУСП)
1. Назначение, состав АУСП
2. Классификация
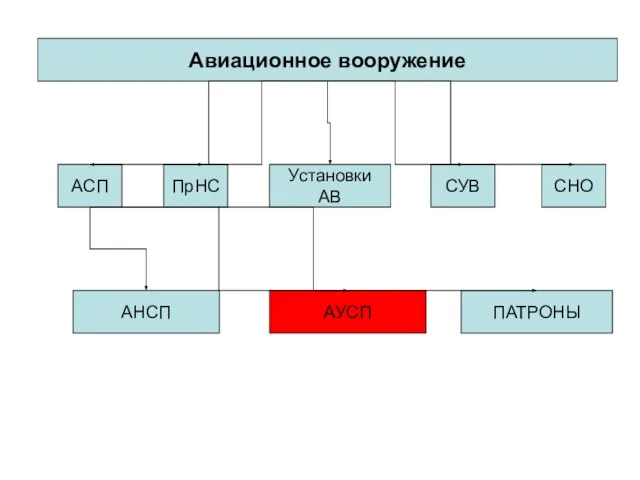
ПрНС
СУВ
Авиационное вооружение
АСП
АНСП
Установки АВ
СНО
АУСП
ПАТРОНЫ
ПрНС
СУВ
Авиационное вооружение
АСП
АНСП
Установки АВ
СНО
АУСП
ПАТРОНЫ

Функциональная схема типовой АУР
Двигательная
установка
Система
энергоснабжения
Электросистема
Система создания
управляющей силы
Боевая часть
Взрывательное
устройство
Система
Функциональная схема типовой АУР
Двигательная
установка
Система
энергоснабжения
Электросистема
Система создания
управляющей силы
Боевая часть
Взрывательное
устройство
Система
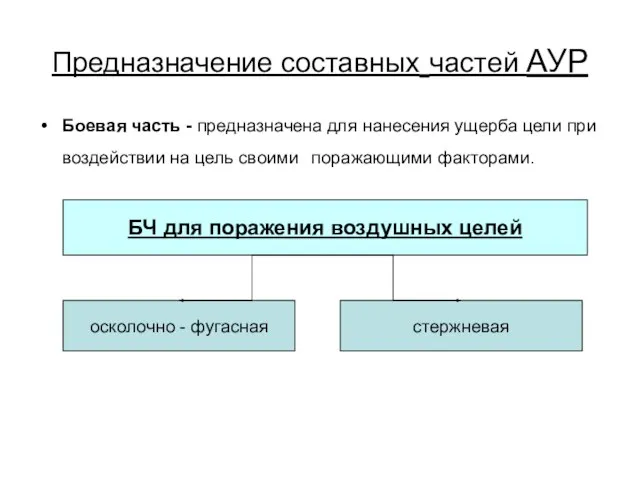
Предназначение составных частей АУР
Боевая часть - предназначена для нанесения ущерба цели
Предназначение составных частей АУР
Боевая часть - предназначена для нанесения ущерба цели
БЧ для поражения наземных целей
осколочно - фугасная
фугасная
кумулятивная
фугасно - кумулятивная
кумулятивно - осколочно
БЧ для поражения наземных целей
осколочно - фугасная
фугасная
кумулятивная
фугасно - кумулятивная
кумулятивно - осколочно
Взрывательное устройство - обеспечивает подрыв боевой части.
Состав взрывательного устройства
контактный взрыватель
неконтактный взрыватель
предохранительно-исполнительный
Взрывательное устройство - обеспечивает подрыв боевой части.
Состав взрывательного устройства
контактный взрыватель
неконтактный взрыватель
предохранительно-исполнительный
Система управления (СУ) и
система создания управляющей силы (ССУС) предназначены для
Система управления (СУ) и система создания управляющей силы (ССУС) предназначены для
Двигательная установка ракеты предназначена для создания силы тяги, в результате действия
Двигательная установка ракеты предназначена для создания силы тяги, в результате действия
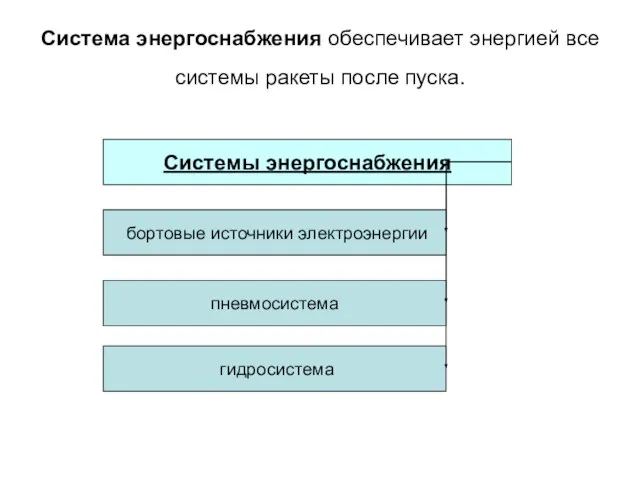
Система энергоснабжения обеспечивает энергией все системы ракеты после пуска.
Системы энергоснабжения
Система энергоснабжения обеспечивает энергией все системы ракеты после пуска.
Системы энергоснабжения
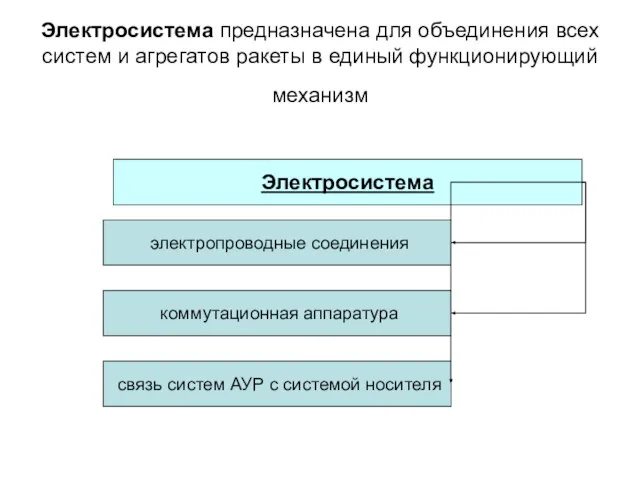
Электросистема предназначена для объединения всех систем и агрегатов ракеты в единый
Электросистема предназначена для объединения всех систем и агрегатов ракеты в единый

2. Классификация авиационных управляемых ракет
АУР классифицируются по:
месту расположения цели;
назначению;
дальности стрельбы;
типу системы
2. Классификация авиационных управляемых ракет
АУР классифицируются по:
месту расположения цели;
назначению;
дальности стрельбы;
типу системы

По месту расположения целей
АУР класса "воздух- воздух"
АУР класса
По месту расположения целей
АУР класса "воздух- воздух"
АУР класса

По назначению:
тактические;
оперативно-тактические;
стратегические.
АУР «В-В»
АУР «В-П»
тактические
стратегические
оперативно-тактические
По назначению:
тактические;
оперативно-тактические;
стратегические.
АУР «В-В»
АУР «В-П»
тактические
стратегические
оперативно-тактические
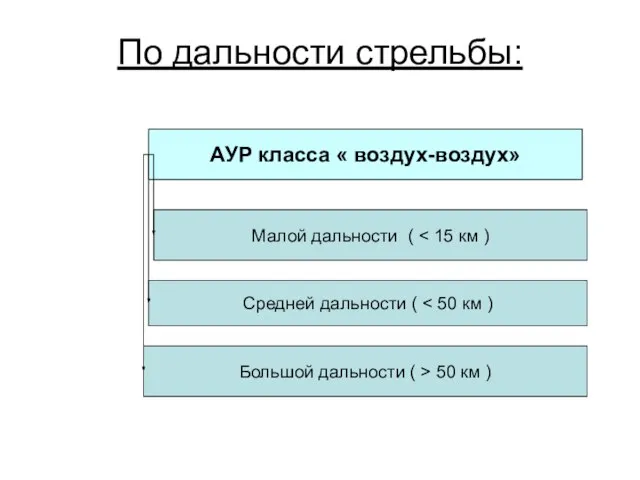
По дальности стрельбы:
АУР класса « воздух-воздух»
Малой дальности ( < 15 км
По дальности стрельбы:
АУР класса « воздух-воздух»
Малой дальности ( < 15 км
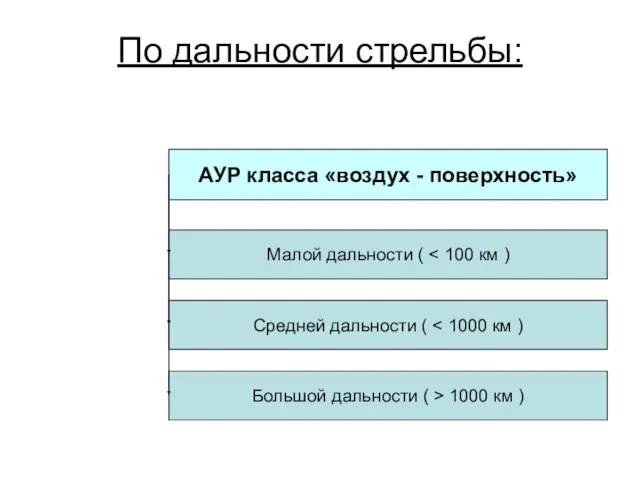
По дальности стрельбы:
АУР класса «воздух - поверхность»
Малой дальности ( < 100
По дальности стрельбы:
АУР класса «воздух - поверхность»
Малой дальности ( < 100
По типу системы управления:
автономного управления
телеуправления
самонаведения
комбинированная
По типу системы управления:
автономного управления
телеуправления
самонаведения
комбинированная
По способу создания
управляющей силы:
аэродинамическая
газодинамическая
аэрогазодинамическая
По способу создания
управляющей силы:
аэродинамическая
газодинамическая
аэрогазодинамическая

Аэродинамические схемы ракет
Нормальная
Элевонная (безхвостка)
Обратная (утка)
С поворотным крылом
Аэродинамические схемы ракет
Нормальная
Элевонная (безхвостка)
Обратная (утка)
С поворотным крылом
3. Основные характеристики авиационных управляемых ракет
Тактико-технические характеристики АУР:
назначение;
типы ЛА, с которых
3. Основные характеристики авиационных управляемых ракет
Тактико-технические характеристики АУР:
назначение;
типы ЛА, с которых

Эксплуатационные характеристики АУР:
состояние поставки от предприятий промышленности;
допустимые условия эксплуатации;
гарантийный ресурс;
межрегламентный ресурс;
тип
Эксплуатационные характеристики АУР:
состояние поставки от предприятий промышленности;
допустимые условия эксплуатации;
гарантийный ресурс;
межрегламентный ресурс;
тип
4. Методы наведения АУР
Методы наведения самонаводящихся АУР:
прямого наведения;
погони (флюгерный);
наведение с заданным
4. Методы наведения АУР
Методы наведения самонаводящихся АУР:
прямого наведения;
погони (флюгерный);
наведение с заданным
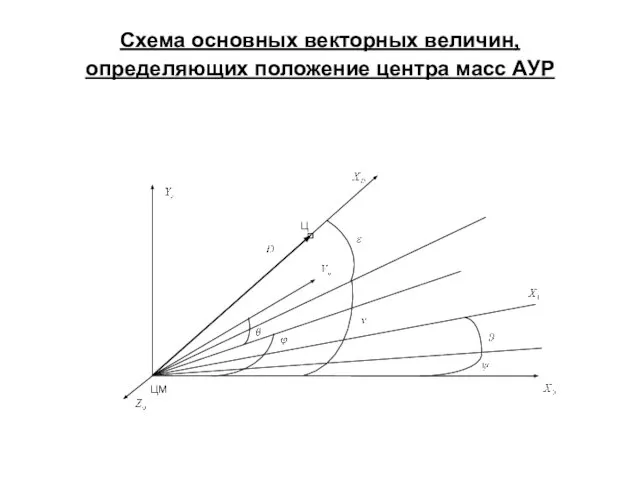
Схема основных векторных величин, определяющих положение центра масс АУР
Схема основных векторных величин, определяющих положение центра масс АУР

- скорость ракеты;
- вектор дальности до цели;
-
- скорость ракеты;
- вектор дальности до цели;
-
Метод прямого наведения
Необходимо, чтобы в процессе полета ракеты ее продольная ось
Метод прямого наведения
Необходимо, чтобы в процессе полета ракеты ее продольная ось
Метод погони
Вектор скорости ракеты направлен на цель по линии ракета –
Метод погони
Вектор скорости ракеты направлен на цель по линии ракета –
Наведение с заданным углом пеленга
Угол между OX (продольной осью ракеты) и
Наведение с заданным углом пеленга
Угол между OX (продольной осью ракеты) и
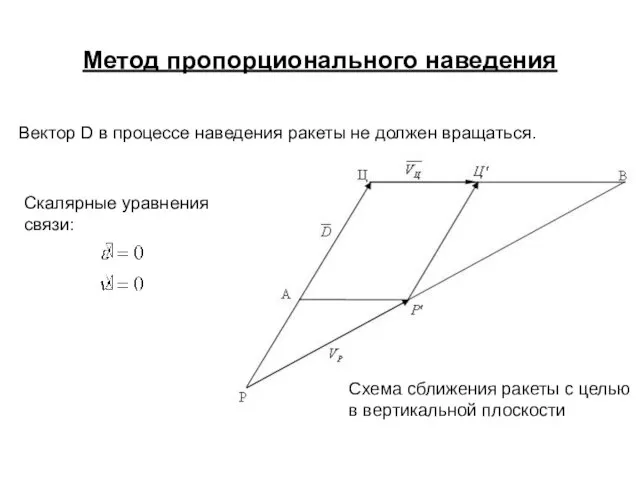
Метод пропорционального наведения
Скалярные уравнения связи:
Вектор D в процессе наведения ракеты не
Метод пропорционального наведения
Скалярные уравнения связи:
Вектор D в процессе наведения ракеты не
 Бортовые радиолокационные станции
Бортовые радиолокационные станции Основы подготовки к военной службе. Основные сведения о воинской обязанности
Основы подготовки к военной службе. Основные сведения о воинской обязанности Уставы Тема № 1 Занятие 2
Уставы Тема № 1 Занятие 2 Организация огневой подготовки в органах внутренних дел РФ
Организация огневой подготовки в органах внутренних дел РФ Призыв на военную службу
Призыв на военную службу Военные угрозы национальной безопасности России
Военные угрозы национальной безопасности России Взрывание мостов. Тема 6
Взрывание мостов. Тема 6 Організація бойової підготовки в підрозділі, частині
Організація бойової підготовки в підрозділі, частині Бронекостюм. Берилл
Бронекостюм. Берилл Взрывоопасные предметы
Взрывоопасные предметы Криминалистическая баллистика
Криминалистическая баллистика Вспомогательные системы, объекты и сооружений окружного склада горючего
Вспомогательные системы, объекты и сооружений окружного склада горючего Основы обеспечения безопасности. Обороноспособность, страны
Основы обеспечения безопасности. Обороноспособность, страны Авиационные генераторы. Интегральный привод - генератор ГП-21
Авиационные генераторы. Интегральный привод - генератор ГП-21 Устройство транспортера тягача МТЛБ. Система смазки двигателя ЯМЗ-238 В. (Тема 3.5)
Устройство транспортера тягача МТЛБ. Система смазки двигателя ЯМЗ-238 В. (Тема 3.5) Воинские звания ВС России
Воинские звания ВС России Организация мотострелкового взвода
Организация мотострелкового взвода Инженерные мины ВС Республики Беларусь. Инженерные заграждения. Противотанковые мины
Инженерные мины ВС Республики Беларусь. Инженерные заграждения. Противотанковые мины За участие в фестивале моделей военной техники
За участие в фестивале моделей военной техники Силы и моменты, действующие на ракету в полёте
Силы и моменты, действующие на ракету в полёте Основы военной службы. Воинская обязанность
Основы военной службы. Воинская обязанность Голубой берет
Голубой берет Химическое оружие
Химическое оружие Вооруженные силы иностранных государств. Вооружённых силы США
Вооруженные силы иностранных государств. Вооружённых силы США Ориентирование на местности без карты. Измерения на местности
Ориентирование на местности без карты. Измерения на местности Чрезвычайные ситуации вызванные военными действиями и социальными факторами
Чрезвычайные ситуации вызванные военными действиями и социальными факторами Организация допуска и подготовки личного состава и техники к боевому дежурству
Организация допуска и подготовки личного состава и техники к боевому дежурству День военно-оркестровой службы Вооружённых сил России
День военно-оркестровой службы Вооружённых сил России