- Устройство и принцип работы автопилота ЗУР 9М39

Содержание
- 2. Вопросы занятия: 1-ый вопрос: Принцип действия одноканальной системы управления. 2-ой вопрос: Общее устройство автопилота ЗУР 9M39.
- 3. 1-ый вопрос: Принцип действия одноканальной системы управления. Система управления полетом ракеты предназначена для осуществления выбранного метода
- 4. Схема формирований команд представлена на рис.1. Ось поворота рулей жестко связана с ракетой и вращается вместе
- 5. При подаче на рулевую машинку двухполярного сигнала на частоте вращения корпуса ракеты (рис. 1, б) рули
- 6. На рис. 1, б показан случай, когда переброс рулей происходит при горизонтальном положении оси их поворота.
- 7. При отсутствии управляющего сигнала на рулевую машинку поступает сигнал только от одной линеаризации (рис. 1.г), рули
- 8. При наличии управляющего сигнала (рис. 1.д) переброс рулей от суммарного сигнала Uсумм будет происходить за один
- 9. Предположим, что управляющая сила R в начальный момент направлена в сторону точки 1. При вращении ракеты
- 10. Управляющая сила перемещается в направлении точки 5 (полярность сигнала Ucyмм постоянна). В точке 5 происходит переброс
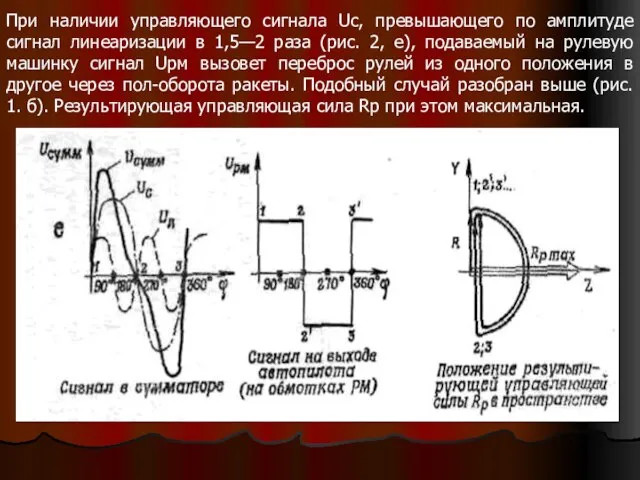
- 11. При наличии управляющего сигнала Uс, превышающего по амплитуде сигнал линеаризации в 1,5—2 раза (рис. 2, е),
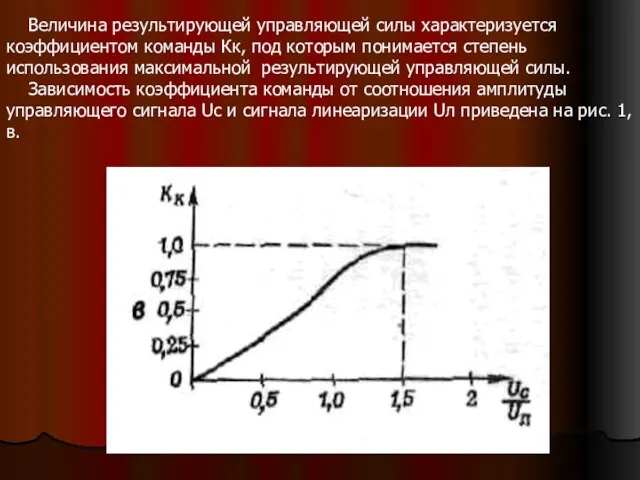
- 12. Величина результирующей управляющей силы характеризуется коэффициентом команды Кк, под которым понимается степень использования максимальной результирующей управляющей
- 13. При изменении фазы управляющего сигнала на - 90, +90 и 180° можно получить результирующую силу, направленную
- 14. 2-ой вопрос: Общее устройство автопилота ЗУР 9M39.
- 20. Скачать презентацию
Вопросы занятия:
1-ый вопрос: Принцип действия одноканальной системы управления.
2-ой вопрос: Общее устройство
Вопросы занятия:
1-ый вопрос: Принцип действия одноканальной системы управления.
2-ой вопрос: Общее устройство

1-ый вопрос: Принцип действия одноканальной системы управления.
Система управления полетом
1-ый вопрос: Принцип действия одноканальной системы управления.
Система управления полетом
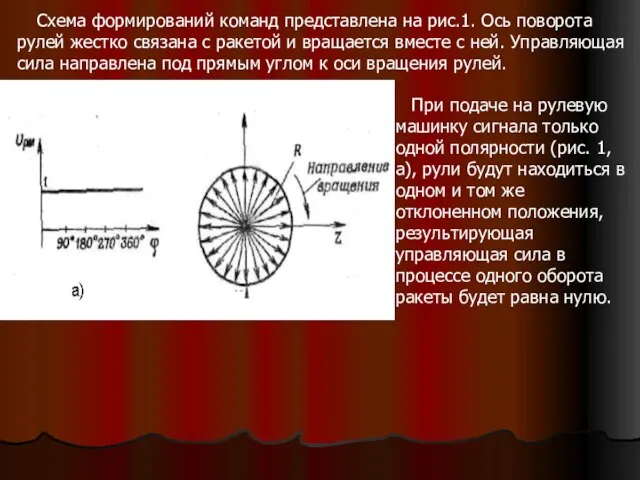
Схема формирований команд представлена на рис.1. Ось поворота рулей жестко
Схема формирований команд представлена на рис.1. Ось поворота рулей жестко
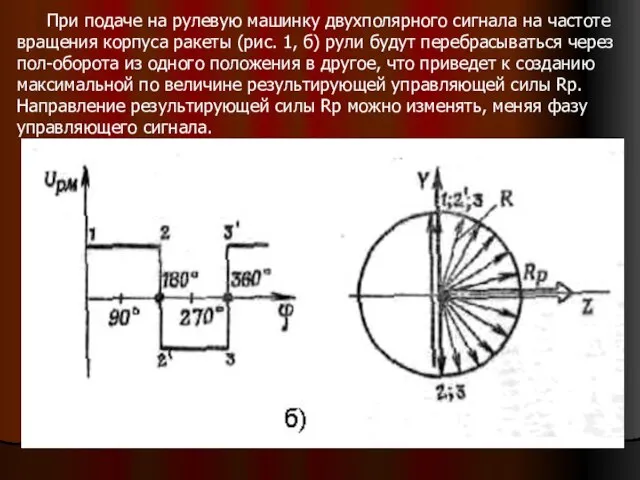
При подаче на рулевую машинку двухполярного сигнала на частоте вращения
При подаче на рулевую машинку двухполярного сигнала на частоте вращения
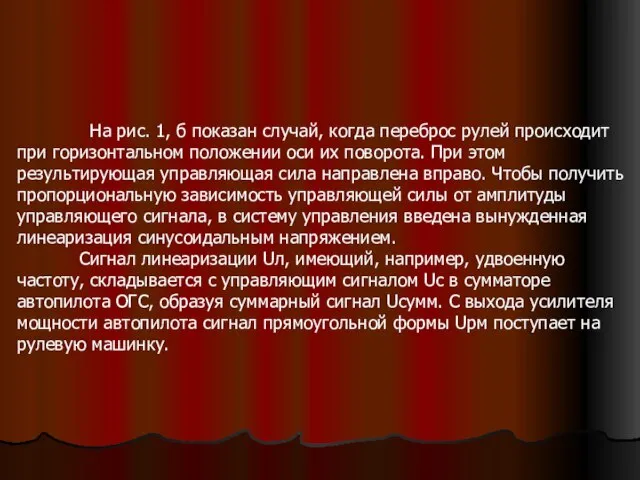
На рис. 1, б показан случай, когда переброс рулей происходит
На рис. 1, б показан случай, когда переброс рулей происходит
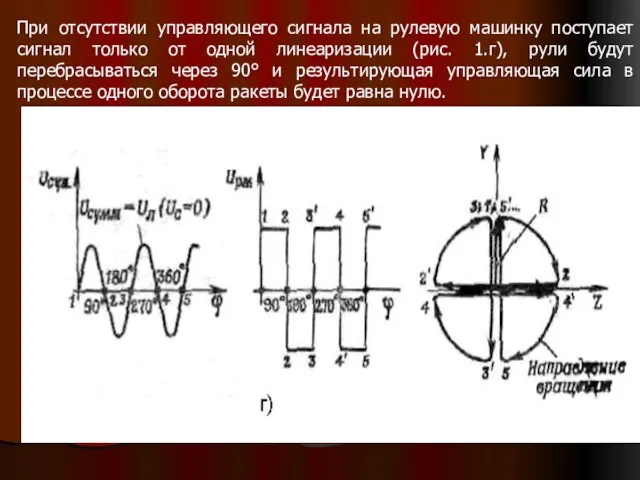
При отсутствии управляющего сигнала на рулевую машинку поступает сигнал только от
При отсутствии управляющего сигнала на рулевую машинку поступает сигнал только от
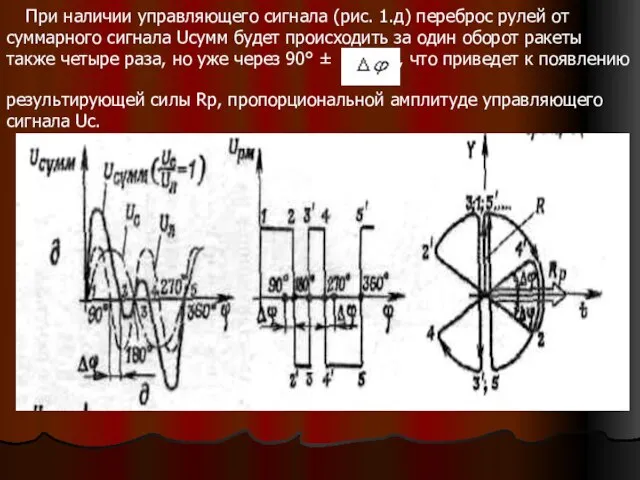
При наличии управляющего сигнала (рис. 1.д) переброс рулей от суммарного
При наличии управляющего сигнала (рис. 1.д) переброс рулей от суммарного
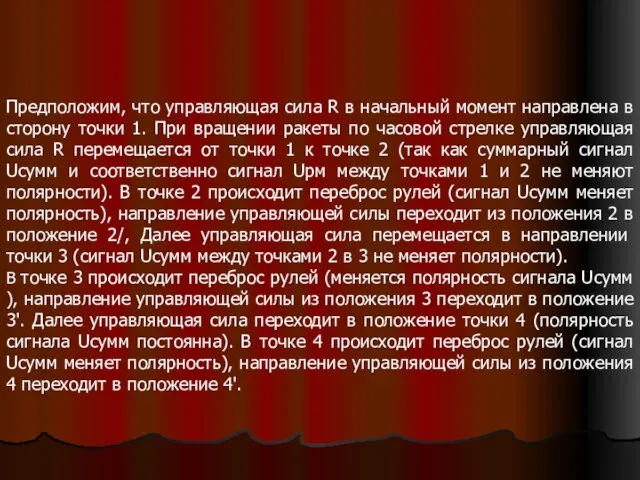
Предположим, что управляющая сила R в начальный момент направлена в сторону
Предположим, что управляющая сила R в начальный момент направлена в сторону
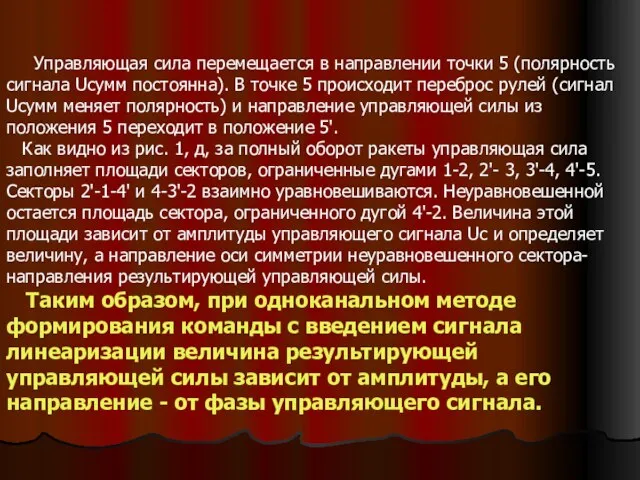
Управляющая сила перемещается в направлении точки 5 (полярность сигнала Ucyмм
Управляющая сила перемещается в направлении точки 5 (полярность сигнала Ucyмм
При наличии управляющего сигнала Uс, превышающего по амплитуде сигнал линеаризации в
При наличии управляющего сигнала Uс, превышающего по амплитуде сигнал линеаризации в
Величина результирующей управляющей силы характеризуется коэффициентом команды Кк, под которым
Величина результирующей управляющей силы характеризуется коэффициентом команды Кк, под которым

При изменении фазы управляющего сигнала на - 90, +90 и 180°
При изменении фазы управляющего сигнала на - 90, +90 и 180°
2-ой вопрос: Общее устройство автопилота ЗУР 9M39.
2-ой вопрос: Общее устройство автопилота ЗУР 9M39.




 Боевая машина пехоты
Боевая машина пехоты Воинские ритуалы
Воинские ритуалы Принципы топографической подготовки сотрудников органов внутренних дел
Принципы топографической подготовки сотрудников органов внутренних дел Ритуалы Вооруженных Сил Российской Федерации Дни воинской Славы
Ритуалы Вооруженных Сил Российской Федерации Дни воинской Славы Подготовка карты к работе. Измерения на карте, определение координат и целеуказания
Подготовка карты к работе. Измерения на карте, определение координат и целеуказания Танки Великой Отечественной войны
Танки Великой Отечественной войны Общее устройство системы электрооборудования. Занятие № 3
Общее устройство системы электрооборудования. Занятие № 3 Прохождение военной службы по контракту
Прохождение военной службы по контракту Воинские звания
Воинские звания Классификация военных самолётов по назначению
Классификация военных самолётов по назначению 4 Военный учебный центр - ГРИШИН Сергей Викторович
4 Военный учебный центр - ГРИШИН Сергей Викторович День военно-оркестровой службы Вооружённых сил России
День военно-оркестровой службы Вооружённых сил России Тактическая подготовка. Цикл тактической и общевоенной подготовки 2019 год
Тактическая подготовка. Цикл тактической и общевоенной подготовки 2019 год RT-23 IPC
RT-23 IPC Российская техника на страже Родины
Российская техника на страже Родины Сохранение и укрепление здоровья – важная часть подготовки юноши допризывного возраста к военной службе и трудовой деятельности
Сохранение и укрепление здоровья – важная часть подготовки юноши допризывного возраста к военной службе и трудовой деятельности Средства снижения заметности войск и зажигательное оружие. Оборудование машины ТМС-65, используемое для дымопуска. (Тема 6.1)
Средства снижения заметности войск и зажигательное оружие. Оборудование машины ТМС-65, используемое для дымопуска. (Тема 6.1)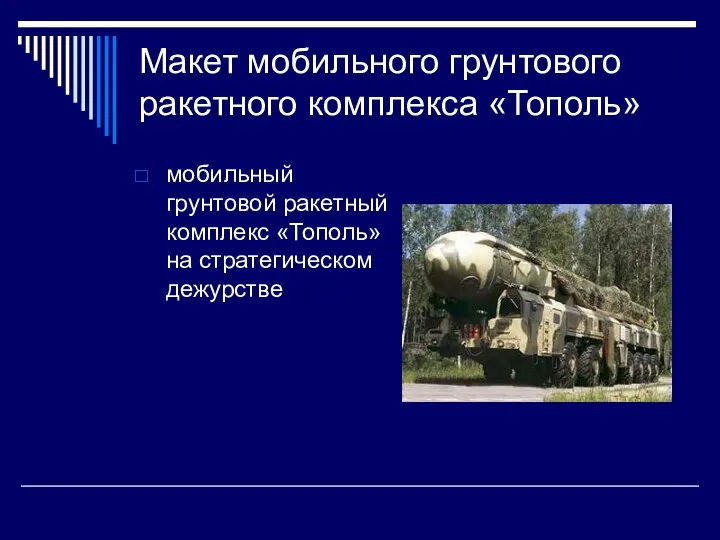 Макет мобильного грунтового ракетного комплекса Тополь
Макет мобильного грунтового ракетного комплекса Тополь Основные понятия радиотехнического обеспечения полетов авиации
Основные понятия радиотехнического обеспечения полетов авиации Тема №18. Планирование и организация морально – психологического обеспечения личного состава подразделения
Тема №18. Планирование и организация морально – психологического обеспечения личного состава подразделения Военно - медицинская подготовка
Военно - медицинская подготовка Основы военной доктрины. Структура и виды Вооруженных Сил РФ. (Тема 1.1)
Основы военной доктрины. Структура и виды Вооруженных Сил РФ. (Тема 1.1) Действия общевойсковых подразделений в вооруженных конфликтах
Действия общевойсковых подразделений в вооруженных конфликтах Системы управления вооружением
Системы управления вооружением Танковые боеприпасы
Танковые боеприпасы ВДВ — история, структура, вооружение
ВДВ — история, структура, вооружение Оперативное оборудование территории Российско Федерации
Оперативное оборудование территории Российско Федерации Комплектование походной аптечки. Переноска пострадавшего
Комплектование походной аптечки. Переноска пострадавшего