- Кинематика точки. Способы задания движения. Уравнения движения. Траектория. Закон движения точки

Содержание
- 2. Содержание Тема 1. Кинематика точки. Способы задания движения. Уравнения движения. Траектория. Закон движения точки. Связь между
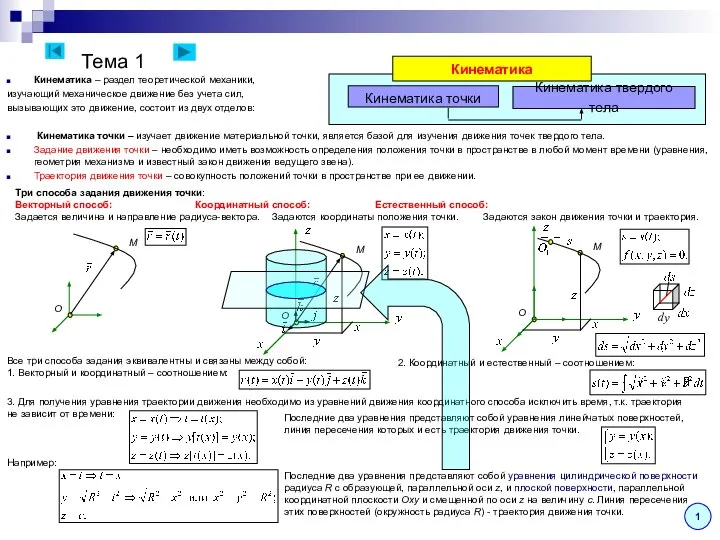
- 3. Тема 1 Кинематика – раздел теоретической механики, изучающий механическое движение без учета сил, вызывающих это движение,
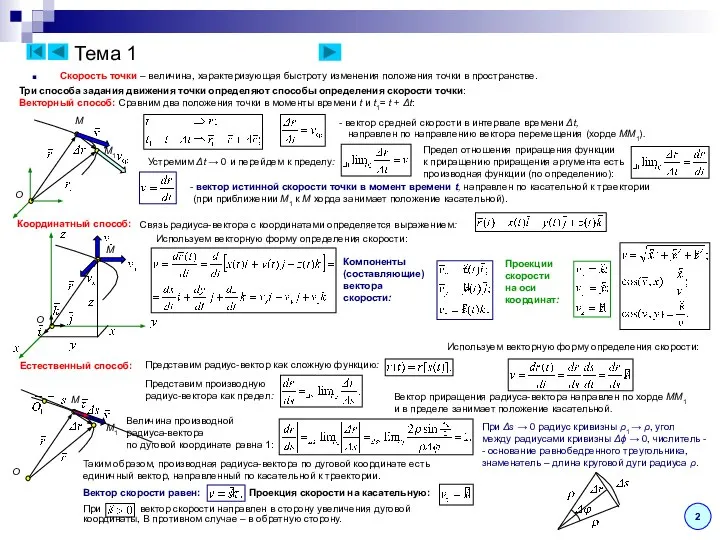
- 4. Тема 1 Скорость точки – величина, характеризующая быстроту изменения положения точки в пространстве. Три способа задания
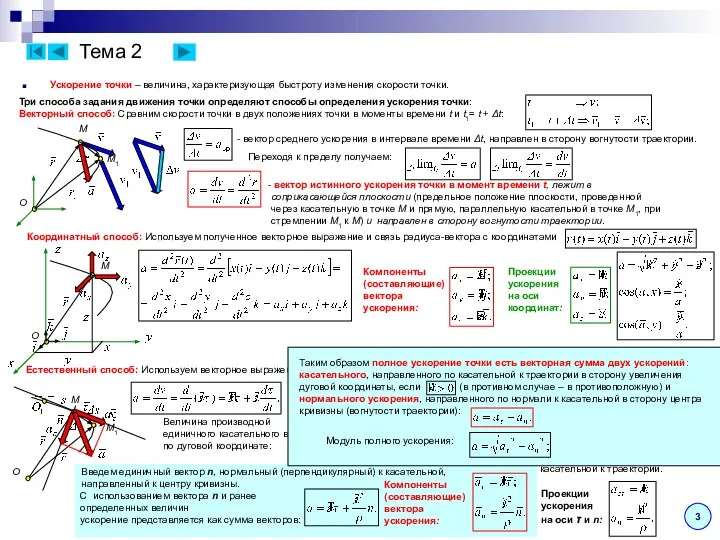
- 5. Тема 2 Ускорение точки – величина, характеризующая быстроту изменения скорости точки. Три способа задания движения точки
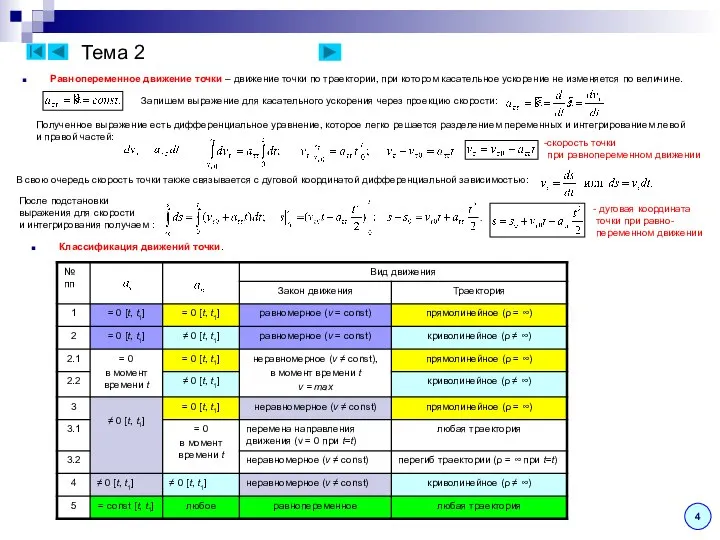
- 6. Тема 2 Равнопеременное движение точки – движение точки по траектории, при котором касательное ускорение не изменяется
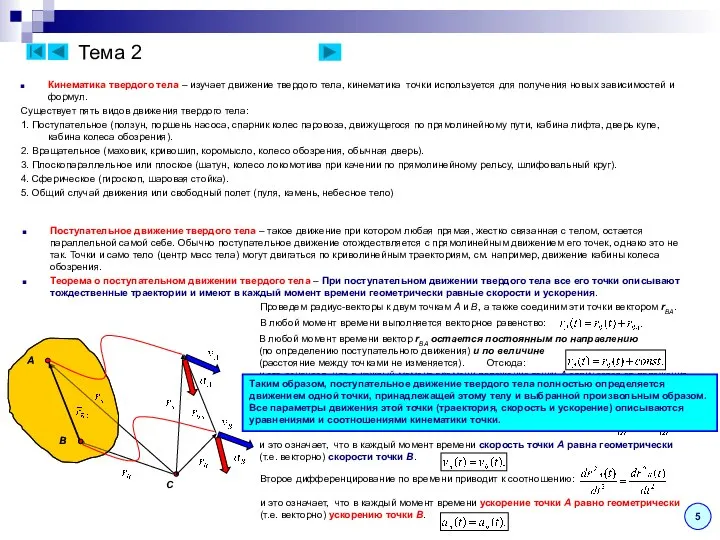
- 7. Тема 2 Кинематика твердого тела – изучает движение твердого тела, кинематика точки используется для получения новых
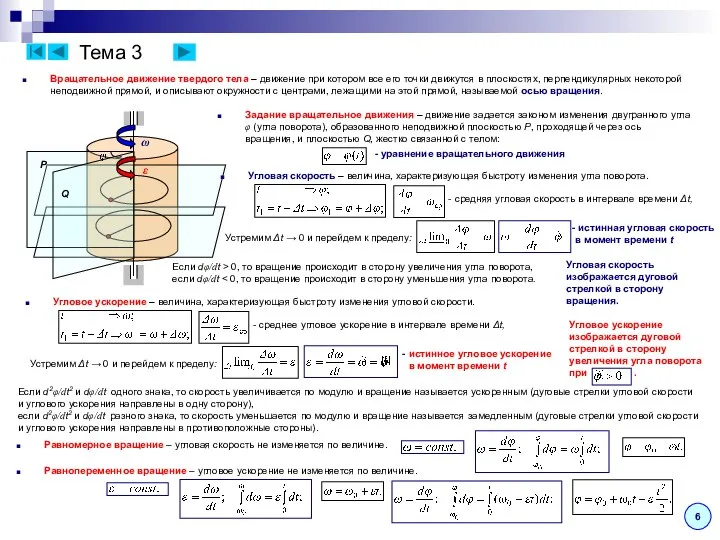
- 8. Тема 3 Вращательное движение твердого тела – движение при котором все его точки движутся в плоскостях,
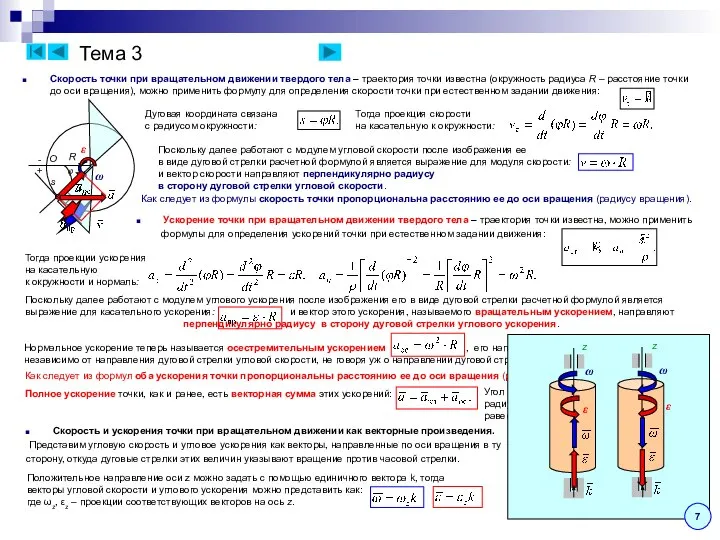
- 9. Тема 3 Скорость точки при вращательном движении твердого тела – траектория точки известна (окружность радиуса R
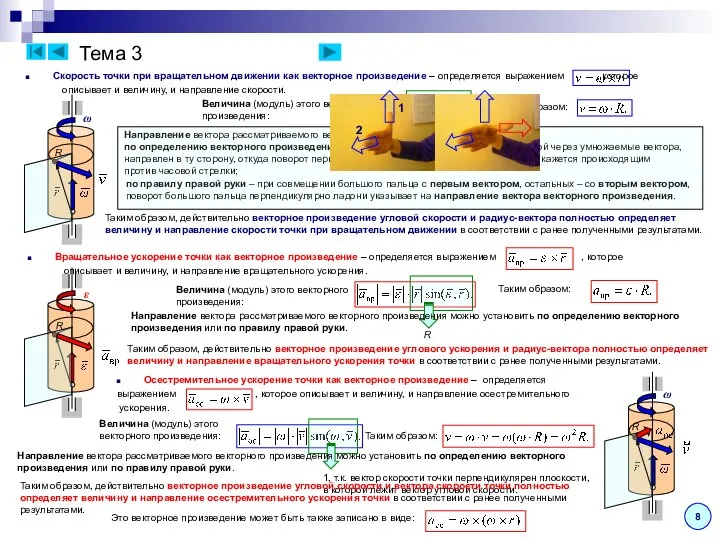
- 10. Тема 3 Скорость точки при вращательном движении как векторное произведение – определяется выражением , которое описывает
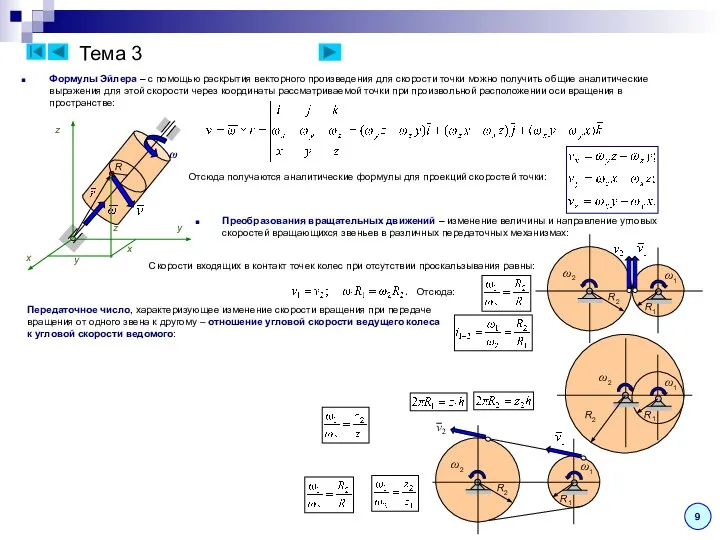
- 11. Тема 3 Формулы Эйлера – с помощью раскрытия векторного произведения для скорости точки можно получить общие
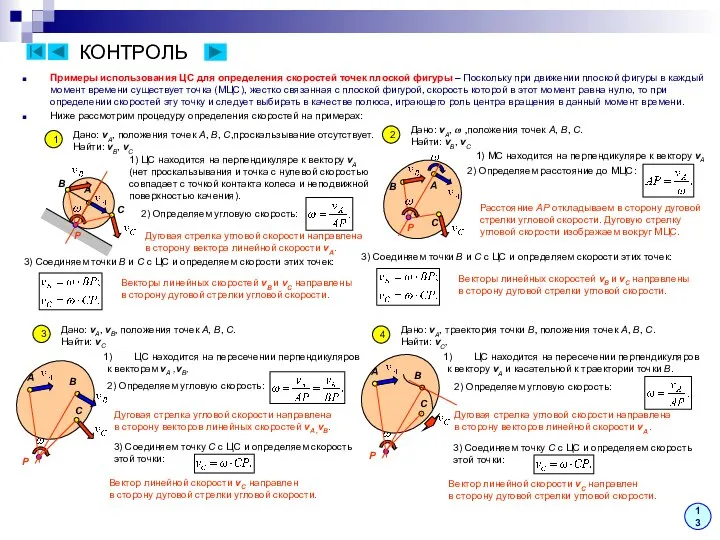
- 12. КОНТРОЛЬ Примеры использования ЦС для определения скоростей точек плоской фигуры – Поскольку при движении плоской фигуры
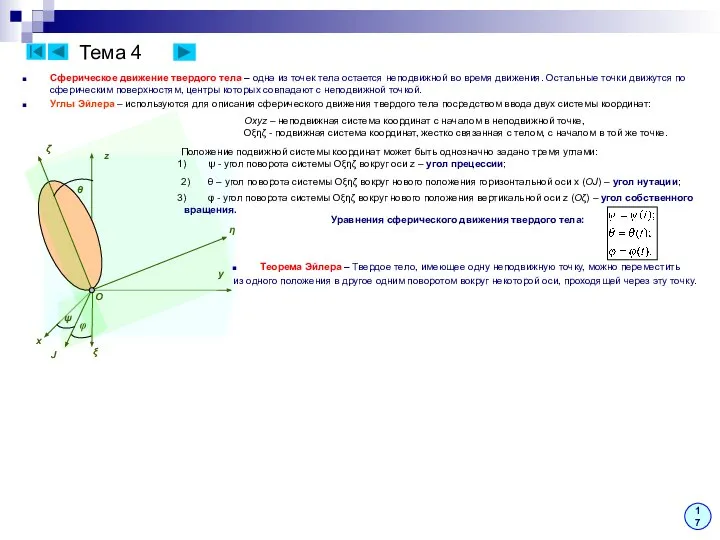
- 13. Тема 4 Сферическое движение твердого тела – одна из точек тела остается неподвижной во время движения.
- 15. Скачать презентацию
Содержание
Тема 1. Кинематика точки. Способы задания движения. Уравнения движения. Траектория. Закон
Содержание
Тема 1. Кинематика точки. Способы задания движения. Уравнения движения. Траектория. Закон
Тема 1
Кинематика – раздел теоретической механики,
изучающий механическое движение без учета сил,
Тема 1
Кинематика – раздел теоретической механики,
изучающий механическое движение без учета сил,
Тема 1
Скорость точки – величина, характеризующая быстроту изменения положения точки в
Тема 1
Скорость точки – величина, характеризующая быстроту изменения положения точки в
Тема 2
Ускорение точки – величина, характеризующая быстроту изменения скорости точки.
Три способа
Тема 2
Ускорение точки – величина, характеризующая быстроту изменения скорости точки.
Три способа
Тема 2
Равнопеременное движение точки – движение точки по траектории, при котором
Тема 2
Равнопеременное движение точки – движение точки по траектории, при котором
Тема 2
Кинематика твердого тела – изучает движение твердого тела, кинематика точки
Тема 2
Кинематика твердого тела – изучает движение твердого тела, кинематика точки
Тема 3
Вращательное движение твердого тела – движение при котором все его
Тема 3
Вращательное движение твердого тела – движение при котором все его
Тема 3
Скорость точки при вращательном движении твердого тела – траектория точки
Тема 3
Скорость точки при вращательном движении твердого тела – траектория точки
Тема 3
Скорость точки при вращательном движении как векторное произведение –
Тема 3
Скорость точки при вращательном движении как векторное произведение –
Тема 3
Формулы Эйлера – с помощью раскрытия векторного произведения для
Тема 3
Формулы Эйлера – с помощью раскрытия векторного произведения для
КОНТРОЛЬ
Примеры использования ЦС для определения скоростей точек плоской фигуры – Поскольку
КОНТРОЛЬ
Примеры использования ЦС для определения скоростей точек плоской фигуры – Поскольку
Тема 4
Сферическое движение твердого тела – одна из точек тела остается
Тема 4
Сферическое движение твердого тела – одна из точек тела остается
 «Отыщи всему начало и ты многое поймёшь» Кузьма Прутков Брендина Наталья Владимировна Учитель физики МОУ средняя
«Отыщи всему начало и ты многое поймёшь» Кузьма Прутков Брендина Наталья Владимировна Учитель физики МОУ средняя Урок физики в 7 классе разработан учителем высшей категории МОУ «Уйская СОШ» Татарниковой Л.П.
Урок физики в 7 классе разработан учителем высшей категории МОУ «Уйская СОШ» Татарниковой Л.П. Симметричный вибратор. Антенно-фидерные устройства и распространение радиоволн. Лекция № 4
Симметричный вибратор. Антенно-фидерные устройства и распространение радиоволн. Лекция № 4 Энтропия. Второе начало термодинамики
Энтропия. Второе начало термодинамики Структурные уровни материалов. Молекулы. Кристаллические решетки
Структурные уровни материалов. Молекулы. Кристаллические решетки Нашему отделу – 30 лет. Планетные миссии с участием нашего отдела
Нашему отделу – 30 лет. Планетные миссии с участием нашего отдела Дисперсия и интерференция света
Дисперсия и интерференция света Трехфазные цепи
Трехфазные цепи Сложение сил, направленных по одной прямой. Равнодействующая сила
Сложение сил, направленных по одной прямой. Равнодействующая сила Специальная теория относительности
Специальная теория относительности Политропные процессы. Энтропия идеального газа. II закон термодинамики
Политропные процессы. Энтропия идеального газа. II закон термодинамики Аналогии и их роль в обучении физике
Аналогии и их роль в обучении физике Презентация Интерференция. Дифракция.
Презентация Интерференция. Дифракция. Муниципальное автономное общеобразовательное учреждение средняя общеобразовательная школа №5 с углубленным изучением хим
Муниципальное автономное общеобразовательное учреждение средняя общеобразовательная школа №5 с углубленным изучением хим Полное отражение
Полное отражение Радиационные переходы
Радиационные переходы Кристаллооптический анализ
Кристаллооптический анализ Магнитные свойства горных пород и руд
Магнитные свойства горных пород и руд Основы энергосбережения и энергоэффективности
Основы энергосбережения и энергоэффективности Радиоактивные превращения атомных ядер
Радиоактивные превращения атомных ядер Автоколлимационный микроскоп. Динаметр. Гониометр
Автоколлимационный микроскоп. Динаметр. Гониометр Нанотехнологии
Нанотехнологии Способы описания движения. Система отсчёта
Способы описания движения. Система отсчёта Презентация по физике "Механика твёрдого тела" - скачать
Презентация по физике "Механика твёрдого тела" - скачать  Лазер и его применение
Лазер и его применение Розрахунок показників надійності по специфічним даним
Розрахунок показників надійності по специфічним даним Магнитные свойства вещества. (Лекция 26)
Магнитные свойства вещества. (Лекция 26) Открытия ХХ века. Шариковая ручка
Открытия ХХ века. Шариковая ручка