- Механика. Механическое движение

Содержание
- 2. 2.1 Механическое движение Механика - раздел физики, изучающий закономерности механического движения и причины, вызывающие или изменяющие
- 3. 2.2 Разделы механики Классическая (ньютоновская) механика - изучает законы движения макроскопических тел, скорости которых малы по
- 4. Классическая механика делится на три раздела: Кинематика изучает движение тел, не рассматривая причины этого движения. Динамика
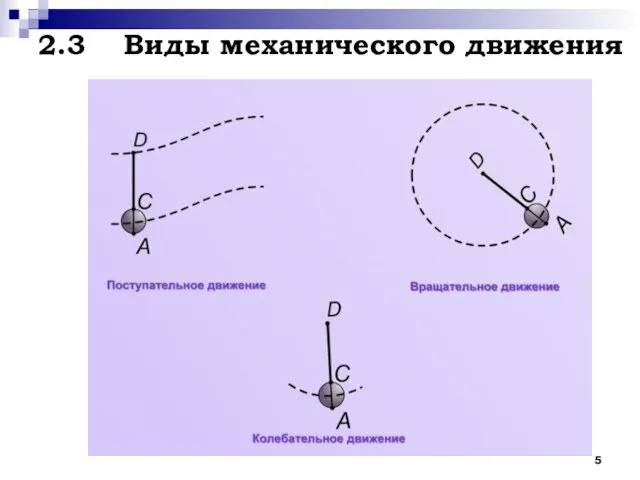
- 5. 2.3 Виды механического движения
- 6. Поступательное движение – это движение, при котором любая прямая, связанная с телом, при его движении остается
- 7. 2.4 Кинематика материальной точки Предметом исследования классической механики является материальная точка. Материальная точка - это тело,
- 8. Судить о движении тела можно, только сопоставляя его с каким-либо другим телом, которое принято называть телом
- 9. Рис.1 Z Y X A(x, y, z) z x y
- 10. При движении материальной точки ее координаты с течением времени изменяются и ее движение определяется кинематическими уравнениями
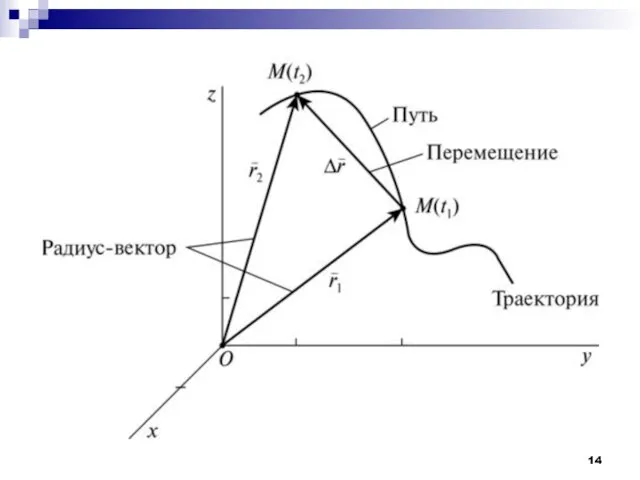
- 11. 2.5.1 Траектория, путь, перемещение Траектория, путь, перемещение – это геометрические характеристики движения. В зависимости от вида
- 12. Расстояние, пройденное материальной точкой по траектории в течение некоторого промежутка времени, называют пройденным путем. Пройденный путь
- 13. Вектор, соединяющий начальную и конечную точку траектории, называется вектором перемещения или перемещением. Вектор перемещения является приращением
- 15. 2.5.2 Скорость Траектория, путь, перемещение полностью движение не описывают. Введем следующую физическую величину – скорость. Скорость
- 16. Предел отношения вектора перемещения к интервалу времени (при интервале времени стремящемуся к нулю), равен скорости материальной
- 17. Можно получить проекции вектора скорости на оси: Модуль скорости определяется выражением: Средняя скорость - скалярная величина,
- 18. За единицу скорости принимают скорость такого равномерного движения, при котором тело за единицу времени (1 с)
- 19. 2.5.3 Ускорение Скорость материальной точки с течением времени может меняться. Для характеристики такого изменения скорости вводится
- 20. При криволинейном движении точки вектор ее ускорения отклонен от касательной к траектории в сторону ее вогнутости:
- 21. Основной единицей ускорения является метр на секунду в квадрате (1 м/с2). За единицу ускорения принимают ускорение
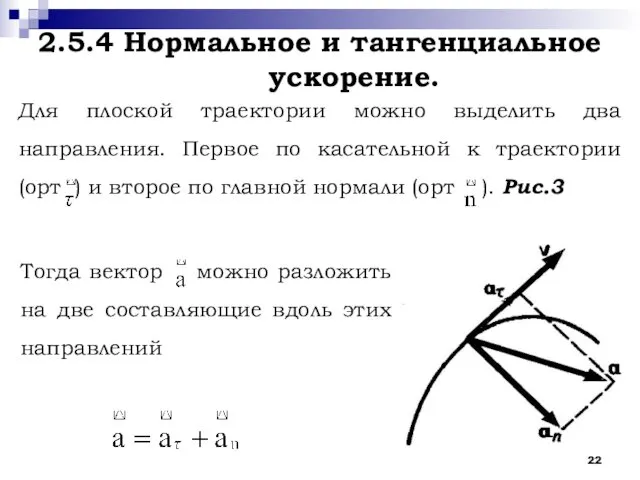
- 22. 2.5.4 Нормальное и тангенциальное ускорение. Для плоской траектории можно выделить два направления. Первое по касательной к
- 23. Составляющая называется тангенциальным (касательным) ускорением, она направлена по касательной к траектории (как и скорость) и характеризует
- 24. Составляющая называется нормальным (центростремительным) ускорением, она направлена по нормали к траектории к центру кривизны траектории и
- 25. Полное ускорение по модулю равно: И составляет угол α с вектором тангенциального ускорения, который определяется соотношением
- 26. 2.5.5 Виды движения в зависимости от составляющих ускорения В зависимости от тангенциальной и нормальной составляющих ускорения
- 27. 2.5.5.1 Прямолинейное равномерное движение Равномерным называют такое движение, при котором тело за любые равные промежутки времени
- 28. 2.5.5.2 Прямолинейное равноускоренное (равнопеременное) движение Движение, при котором скорость тела за любые равные промежутки времени увеличивается
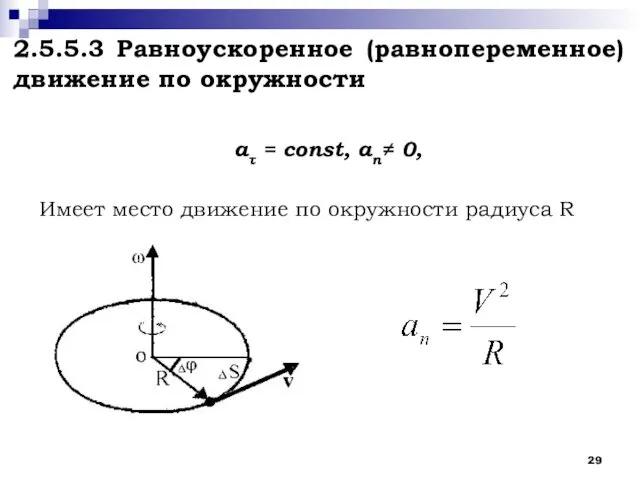
- 29. 2.5.5.3 Равноускоренное (равнопеременное) движение по окружности aτ = const, an≠ 0, Имеет место движение по окружности
- 30. Рис. 5 φ – угол между радиус-вектором и осью х – угловое пермещение. С течением времени
- 31. Угловая скорость есть векторная величина, равная здесь dφ – угловое перемещение, вектор ω направлен вдоль оси
- 32. Угловое ускорение есть векторная величина, равная причем вектор ε cонаправлен вектору ω при ускоренном движении и
- 33. Связь между линейными и угловыми величинами: v=Rω, s = Rφ, aτ =Rε, Для равнопеременного движения по
- 34. 2.5.5.4 Равномерное движение по окружности aτ = 0, an= const, Для равномерного движения по окружности ω=const
- 35. Промежуток времени в течение которого точка совершает один поворот, называется периодом вращения. Число полных оборотов, совершаемых
- 37. Скачать презентацию
2.1 Механическое движение
Механика - раздел физики, изучающий закономерности механического движения и
2.1 Механическое движение
Механика - раздел физики, изучающий закономерности механического движения и
2.2 Разделы механики
Классическая (ньютоновская) механика - изучает законы движения макроскопических тел,
2.2 Разделы механики
Классическая (ньютоновская) механика - изучает законы движения макроскопических тел,
Классическая механика делится на три раздела:
Кинематика изучает движение тел, не
Классическая механика делится на три раздела:
Кинематика изучает движение тел, не
2.3 Виды механического движения
2.3 Виды механического движения
Поступательное движение – это движение, при котором любая прямая, связанная
Поступательное движение – это движение, при котором любая прямая, связанная
2.4 Кинематика материальной точки
Предметом исследования классической механики является материальная точка.
Материальная
2.4 Кинематика материальной точки
Предметом исследования классической механики является материальная точка.
Материальная
Судить о движении тела можно, только сопоставляя его с каким-либо другим
Судить о движении тела можно, только сопоставляя его с каким-либо другим
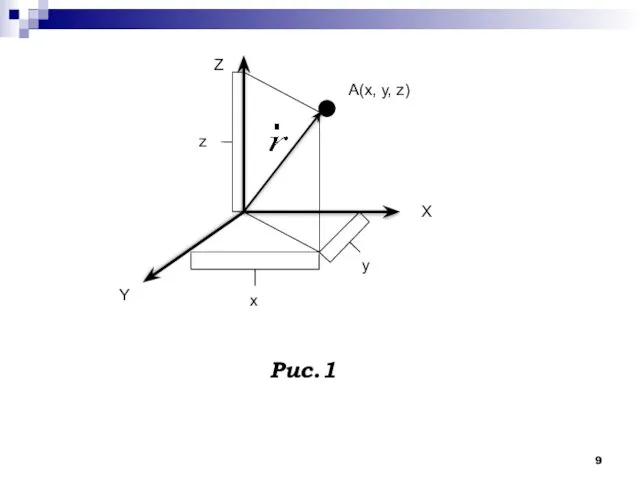
Рис.1
Z
Y
X
A(x, y, z)
z
x
y
Рис.1
Z
Y
X
A(x, y, z)
z
x
y
При движении материальной точки ее координаты с течением времени изменяются и
При движении материальной точки ее координаты с течением времени изменяются и
2.5.1 Траектория, путь, перемещение
Траектория, путь, перемещение – это геометрические характеристики движения.
2.5.1 Траектория, путь, перемещение
Траектория, путь, перемещение – это геометрические характеристики движения.
Расстояние, пройденное материальной точкой по траектории в течение некоторого промежутка времени,
Расстояние, пройденное материальной точкой по траектории в течение некоторого промежутка времени,
Вектор, соединяющий начальную и конечную точку траектории, называется вектором перемещения или
Вектор, соединяющий начальную и конечную точку траектории, называется вектором перемещения или
2.5.2 Скорость
Траектория, путь, перемещение полностью движение не описывают. Введем следующую
2.5.2 Скорость
Траектория, путь, перемещение полностью движение не описывают. Введем следующую
Предел отношения вектора перемещения к интервалу времени (при интервале времени стремящемуся
Предел отношения вектора перемещения к интервалу времени (при интервале времени стремящемуся
Можно получить проекции вектора скорости на оси:
Модуль скорости определяется выражением:
Средняя скорость
Можно получить проекции вектора скорости на оси:
Модуль скорости определяется выражением:
Средняя скорость
За единицу скорости принимают скорость такого равномерного движения, при котором тело
За единицу скорости принимают скорость такого равномерного движения, при котором тело
2.5.3 Ускорение
Скорость материальной точки с течением времени может меняться. Для
2.5.3 Ускорение
Скорость материальной точки с течением времени может меняться. Для
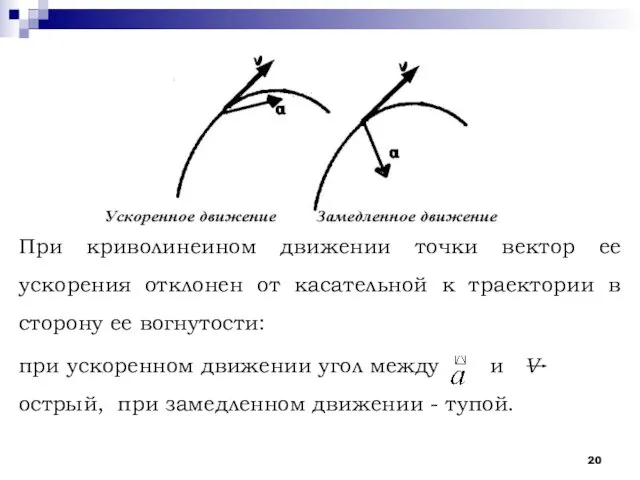
При криволинейном движении точки вектор ее ускорения отклонен от касательной к
При криволинейном движении точки вектор ее ускорения отклонен от касательной к
Основной единицей ускорения является метр на секунду в квадрате (1 м/с2).
2.5.4 Нормальное и тангенциальное ускорение.
Для плоской траектории можно выделить два направления.
2.5.4 Нормальное и тангенциальное ускорение.
Для плоской траектории можно выделить два направления.
Составляющая называется тангенциальным (касательным) ускорением, она направлена по касательной к траектории
Составляющая называется тангенциальным (касательным) ускорением, она направлена по касательной к траектории
Составляющая называется нормальным (центростремительным) ускорением, она направлена по нормали к траектории
Составляющая называется нормальным (центростремительным) ускорением, она направлена по нормали к траектории
Полное ускорение по модулю равно:
И составляет угол α с вектором тангенциального
Полное ускорение по модулю равно:
И составляет угол α с вектором тангенциального
2.5.5 Виды движения в зависимости от составляющих ускорения
В зависимости от тангенциальной
2.5.5 Виды движения в зависимости от составляющих ускорения
В зависимости от тангенциальной
2.5.5.1 Прямолинейное равномерное движение
Равномерным называют такое движение, при котором тело
2.5.5.1 Прямолинейное равномерное движение
Равномерным называют такое движение, при котором тело
2.5.5.2 Прямолинейное равноускоренное (равнопеременное) движение
Движение, при котором скорость тела за любые
2.5.5.2 Прямолинейное равноускоренное (равнопеременное) движение
Движение, при котором скорость тела за любые
2.5.5.3 Равноускоренное (равнопеременное) движение по окружности
aτ = const, an≠ 0,
Имеет
2.5.5.3 Равноускоренное (равнопеременное) движение по окружности
aτ = const, an≠ 0,
Имеет
Рис. 5
φ – угол между радиус-вектором и осью х – угловое
Рис. 5
φ – угол между радиус-вектором и осью х – угловое
Угловая скорость есть векторная величина, равная
здесь dφ – угловое перемещение,
вектор
Угловая скорость есть векторная величина, равная
здесь dφ – угловое перемещение,
вектор
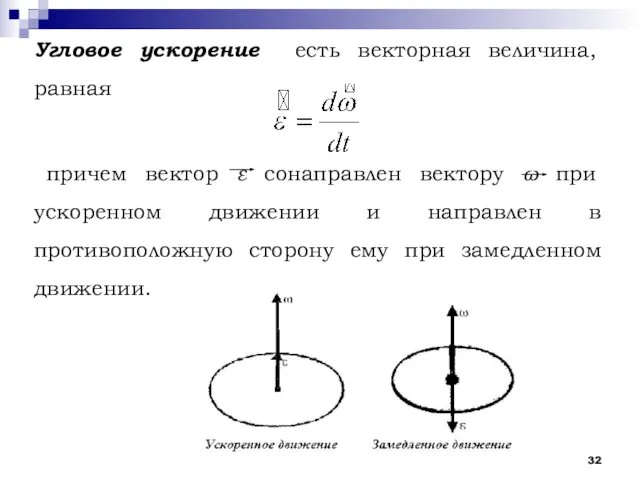
Угловое ускорение есть векторная величина, равная
причем вектор ε cонаправлен вектору ω
Угловое ускорение есть векторная величина, равная
причем вектор ε cонаправлен вектору ω
Связь между линейными и угловыми величинами:
v=Rω, s = Rφ, aτ
Связь между линейными и угловыми величинами:
v=Rω, s = Rφ, aτ
2.5.5.4 Равномерное движение по окружности
aτ = 0, an= const,
Для равномерного
2.5.5.4 Равномерное движение по окружности
aτ = 0, an= const,
Для равномерного
Промежуток времени в течение которого точка совершает один поворот, называется периодом
Промежуток времени в течение которого точка совершает один поворот, называется периодом
 Ремонт автомобилей. Восстановление деталей слесарно-механической обработкой. (Тема 3.2)
Ремонт автомобилей. Восстановление деталей слесарно-механической обработкой. (Тема 3.2) Оптический пинцет. Занятие 6
Оптический пинцет. Занятие 6 This presentation will be on the topic of lightning
This presentation will be on the topic of lightning Ионизирующее излучение
Ионизирующее излучение Электромагнитная совместимость (ЭМС) РЭС
Электромагнитная совместимость (ЭМС) РЭС Преломление света. Закон преломления света
Преломление света. Закон преломления света Электрическое поле в вакууме. (Тема 13)
Электрическое поле в вакууме. (Тема 13) Презентация по физике "Что такое свет Корпускулярно-волновой дуализм" - скачать бесплатно
Презентация по физике "Что такое свет Корпускулярно-волновой дуализм" - скачать бесплатно Спектрометр ямр, його характеристики. Технічні деталі з’йомки спектрів ямр
Спектрометр ямр, його характеристики. Технічні деталі з’йомки спектрів ямр Влияние электромагнитного излучения компьютеров на организм школьника
Влияние электромагнитного излучения компьютеров на организм школьника Проводники в электрическом поле
Проводники в электрическом поле Разработка системы управления узлом подготовки реакционной смеси с применением САР соотношения расходов
Разработка системы управления узлом подготовки реакционной смеси с применением САР соотношения расходов Элементы физической кинетики
Элементы физической кинетики Урок – практикум по решению задач на смешанное соединение проводников
Урок – практикум по решению задач на смешанное соединение проводников Действие физических факторов на микроорганизмы. (Лекция 10)
Действие физических факторов на микроорганизмы. (Лекция 10) Законы сохранения
Законы сохранения Электромагнитное поле
Электромагнитное поле Аттестационная работа. Равновесие рычага и золотое сечение
Аттестационная работа. Равновесие рычага и золотое сечение Лекція 3. Розтяг та стиск прямого бруса
Лекція 3. Розтяг та стиск прямого бруса Презентация История создания тепловых двигателей
Презентация История создания тепловых двигателей  Электрический ток
Электрический ток Презентация по физике "Магнітні властивості речовини" - скачать
Презентация по физике "Магнітні властивості речовини" - скачать  Нормативные документы. «Защита от шума». «Проектирование звукоизоляции ограждающих конструкций жилых и общественных зданий»
Нормативные документы. «Защита от шума». «Проектирование звукоизоляции ограждающих конструкций жилых и общественных зданий» Удивительные и странные свойства воды
Удивительные и странные свойства воды Пожарная опасность выхода горючих веществ из поврежденного технологического оборудования. (Тема 5)
Пожарная опасность выхода горючих веществ из поврежденного технологического оборудования. (Тема 5) Задачи
Задачи Энергетические установки железнодорожного транспорта
Энергетические установки железнодорожного транспорта Расчет электрического сопротивления бесконечного каркаса
Расчет электрического сопротивления бесконечного каркаса