фигуры
5
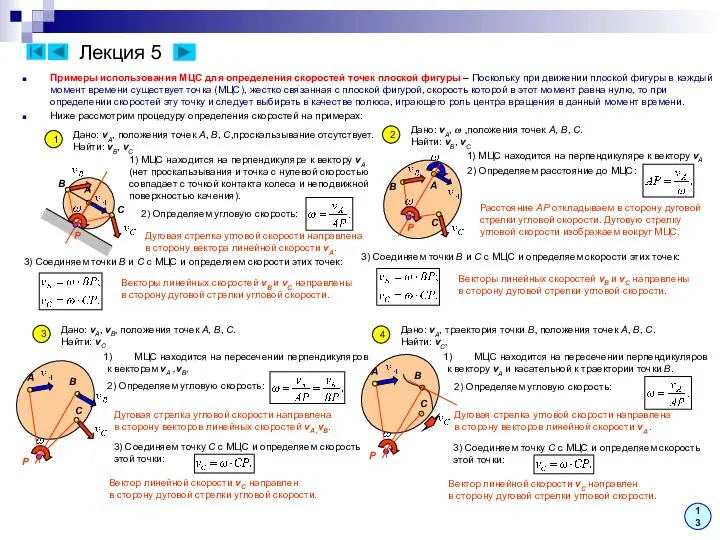
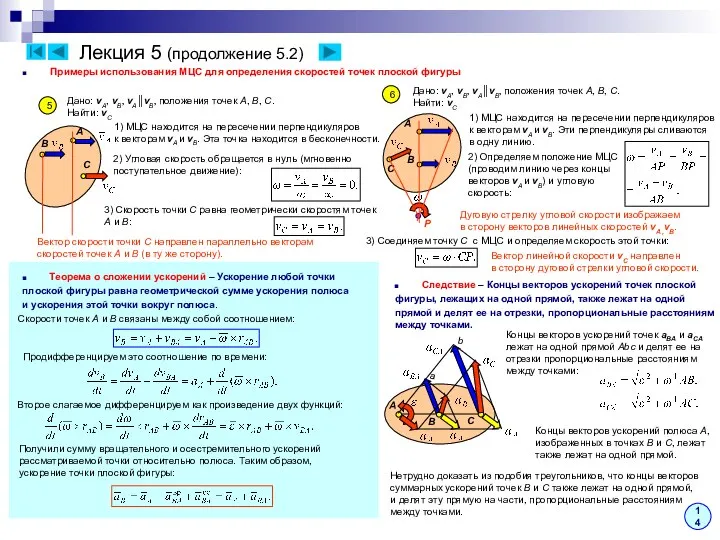
Дано: vA, vB, vA║vB, положения точек A, B, C.
Найти: vC
1) МЦС находится на пересечении перпендикуляров
к векторам vA и vB. Эта точка находится в бесконечности.
2) Угловая скорость обращается в нуль (мгновенно
поступательное движение):
3) Скорость точки C равна геометрически скоростям точек
A и B:
Вектор скорости точки C направлен параллельно векторам скоростей точек A и B (в ту же сторону).
6
Дано: vA, vB, vA║vB, положения точек A, B, C.
Найти: vC
1) МЦС находится на пересечении перпендикуляров
к векторам vA и vB. Эти перпендикуляры сливаются
в одну линию.
2) Определяем положение МЦС
(проводим линию через концы
векторов vA и vB) и угловую
скорость:
3) Соединяем точку C с МЦС и определяем скорость этой точки:
Дуговую стрелку угловой скорости изображаем
в сторону векторов линейных скоростей vA ,vB.
Вектор линейной скорости vC направлен
в сторону дуговой стрелки угловой скорости.
7
Дано: vA, vB, vA║vB, положения точек A, B, C.
Найти: vC
1) МЦС находится на пересечении перпендикуляров
к векторам vA и vB. Эти перпендикуляры сливаются
в одну линию.
2) Определяем положение МЦС
(проводим линию через концы
векторов vA и vB) и угловую
скорость:
3) Соединяем точку C с МЦС и определяем скорость этой точки:
Дуговую стрелку угловой скорости изображаем
в сторону векторов линейных скоростей vA ,vB.
Вектор линейной скорости vC направлен
в сторону дуговой стрелки угловой скорости.
Пример использования МЦС при исследовании работы
кривошипно-шатунного механизма – См. решение задачи М.16.28
“Теоретическая механика в примерах и задачах. Кинематика” (электронное
пособие автора www.miit.ru/institut/ipss/faculties/trm/main.htm ),
Теорема о сложении ускорений – Ускорение любой точки
плоской фигуры равна геометрической сумме ускорения полюса
и ускорения этой точки вокруг полюса.
Скорости точек A и B связаны между собой соотношением:
Продифференцируем это соотношение по времени:
Второе слагаемое дифференцируем как произведение двух функций:
Получили сумму вращательного и осестремительного ускорений
рассматриваемой точки относительно полюса. Таким образом,
ускорение точки плоской фигуры:
Следствие – Концы векторов ускорений точек плоской
фигуры, лежащих на одной прямой, также лежат на одной
прямой и делят ее на отрезки, пропорциональные расстояниям
между точками.
Концы векторов ускорений точек aBA и aСA
лежат на одной прямой Abc и делят ее на
отрезки пропорциональные расстояниям
между точками:
Концы векторов ускорений полюса A,
изображенных в точках B и C, лежат
также лежат на одной прямой.
Нетрудно доказать из подобия треугольников, что концы векторов
суммарных ускорений точек B и C также лежат на одной прямой,
и делят эту прямую на части, пропорциональные расстояниям
между точками.
14

 Составные части реактивного двигателя
Составные части реактивного двигателя ФИЗИКА - наука о движении и взаимодействии материальных объектов.
ФИЗИКА - наука о движении и взаимодействии материальных объектов. Експериментальна перевірка властивостей електромагнітних хвиль
Експериментальна перевірка властивостей електромагнітних хвиль Двигатель внутреннего сгорания
Двигатель внутреннего сгорания Приёмники оптического излучения
Приёмники оптического излучения Резонанс. Колебание
Резонанс. Колебание Диэлектрофорез вирионов осповакцины
Диэлектрофорез вирионов осповакцины Автор: Васильева Е.Д.
Автор: Васильева Е.Д.  Measurements at high voltage
Measurements at high voltage Проектирование участка технического обслуживания и ремонта передней подвески автомобиля Hyundai santa fe
Проектирование участка технического обслуживания и ремонта передней подвески автомобиля Hyundai santa fe Технические средства нанотехнологий. Диагностика и методы исследования нанообъектов и наносистем
Технические средства нанотехнологий. Диагностика и методы исследования нанообъектов и наносистем Ультразвуковая дефектоскопия
Ультразвуковая дефектоскопия Муниципальное общеобразовательное учреждение средняя общеобразовательная школа №2. Научно-исследовательская работа по физике
Муниципальное общеобразовательное учреждение средняя общеобразовательная школа №2. Научно-исследовательская работа по физике  Магнітне обертання площини поляризації (ефект Фарадея). (Лабораторна робота № 3-7)
Магнітне обертання площини поляризації (ефект Фарадея). (Лабораторна робота № 3-7)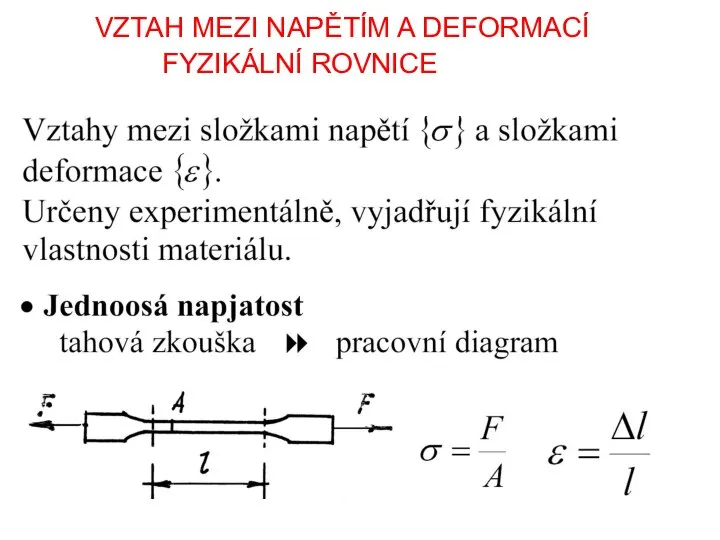 Vztah mezi napětím a deformací fyzikální rovnice
Vztah mezi napětím a deformací fyzikální rovnice Презентация по физике "Фотоэффект" - скачать
Презентация по физике "Фотоэффект" - скачать 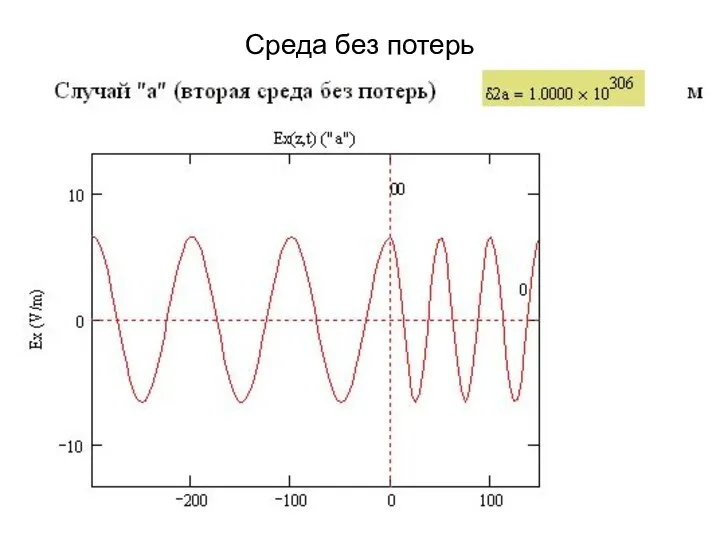 Плоские волны
Плоские волны Закон сохранения и превращения энергии в механических и тепловых процессах.
Закон сохранения и превращения энергии в механических и тепловых процессах. Атомная эмиссионная и флуоресцентная спектроскопии
Атомная эмиссионная и флуоресцентная спектроскопии Ножовка по металлу
Ножовка по металлу Теплопроводность
Теплопроводность Линзы Построение изображений
Линзы Построение изображений Презентация по физике "Наслідки опромінення людини. Вплив радіації на організм" - скачать бесплатно
Презентация по физике "Наслідки опромінення людини. Вплив радіації на організм" - скачать бесплатно Таблицы по физике
Таблицы по физике  Физиканы оқытудың заманауи әдістері. Техникалық жоғарғы оқу орнындағы физиканы оқытудың мәселелік жобасы
Физиканы оқытудың заманауи әдістері. Техникалық жоғарғы оқу орнындағы физиканы оқытудың мәселелік жобасы Рентгенівське випромінювання
Рентгенівське випромінювання  Работу выполнила учитель физики МОУ «Пайская основная школа №8» Перчикова Антонина Васильевна
Работу выполнила учитель физики МОУ «Пайская основная школа №8» Перчикова Антонина Васильевна Явление электромагнитной индукции
Явление электромагнитной индукции