- Обработка результатов численного эксперимента

Содержание
- 2. В начале, в середине и в конце перпендикулярно каждому основанию эпюры отложить в масштабе рассчитанные ординаты
- 3. Оценив прочность, следует сделать вывод, выполняется или не выполняется условие прочности. Если условие прочности выполняется, то
- 4. РАЗРАБОТКА КИНЕМАТИЧЕСКОЙ СХЕМЫ МЕХАНИЗМА ПЕРЕДАЧИ ДВИЖЕНИЯ
- 5. В манипуляторах ПР используются высокоскоростные двигатели, поэтому передаточное число принимает большое значение. Передать движение с помощью
- 6. ВАЖНО Значения передаточных чисел отдельных передач должны быть рационально распределены по ступеням многозвенного механизма. Целесообразно увеличивать
- 7. В курсовом проекте предполагается, что передачу движения от двигателя к руке необходимо осуществить с помощью передаточного
- 8. ПОДБОР ДВИГАТЕЛЯ ПРИВОДА ТРЕТЬЕГО ЗВЕНА
- 9. При повороте исполнительного звена приведенный момент инерции вычисляется по формуле: где момент инерции ротора двигателя, (представлен
- 10. В курсовом проекте требуется подобрать двигатель для последней степени подвижности манипулятора. В этом случае момент инерции
- 12. Случай для прямоугольного сечения, состоящего из двух прямоугольников 1-ый случай: Jи.э.=2/3*b*h*L3; 2-ой случай: Jи.э.=2/3*b*h*L3-2*m*a2 m=ϒ*b*h*L3
- 14. Скачать презентацию
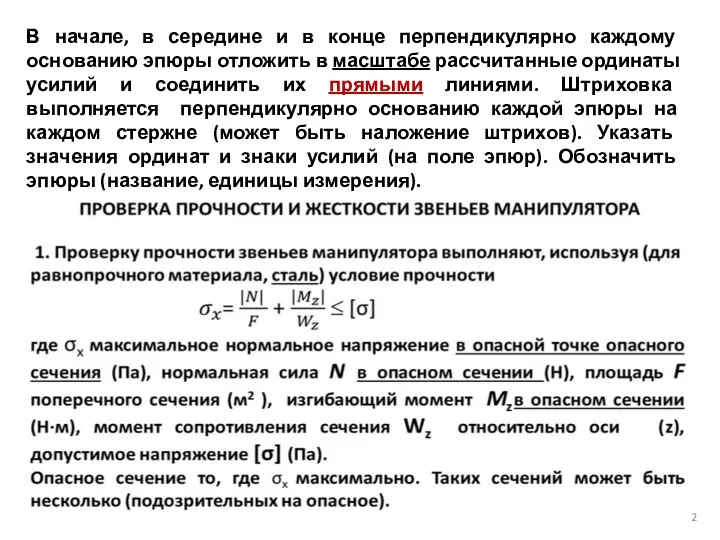
В начале, в середине и в конце перпендикулярно каждому основанию эпюры
В начале, в середине и в конце перпендикулярно каждому основанию эпюры
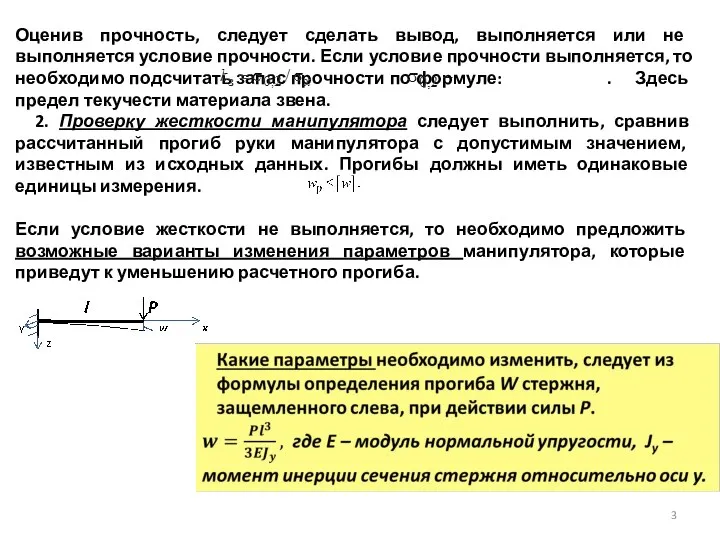
Оценив прочность, следует сделать вывод, выполняется или не выполняется условие прочности.
Оценив прочность, следует сделать вывод, выполняется или не выполняется условие прочности.
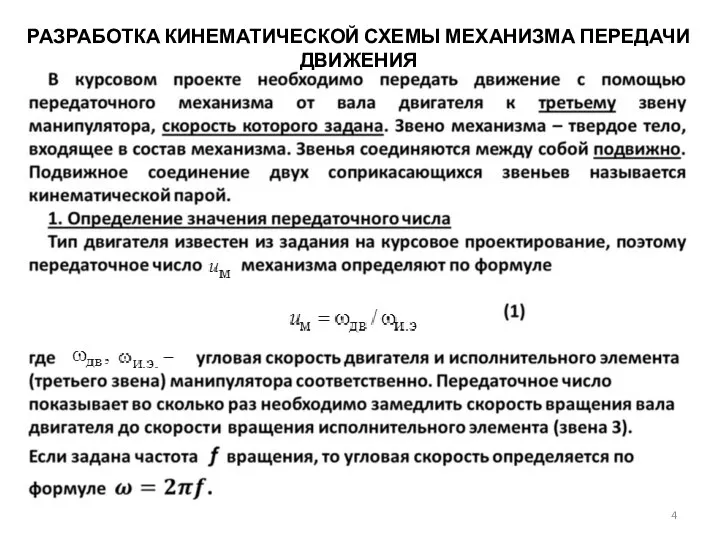
РАЗРАБОТКА КИНЕМАТИЧЕСКОЙ СХЕМЫ МЕХАНИЗМА ПЕРЕДАЧИ ДВИЖЕНИЯ
РАЗРАБОТКА КИНЕМАТИЧЕСКОЙ СХЕМЫ МЕХАНИЗМА ПЕРЕДАЧИ ДВИЖЕНИЯ
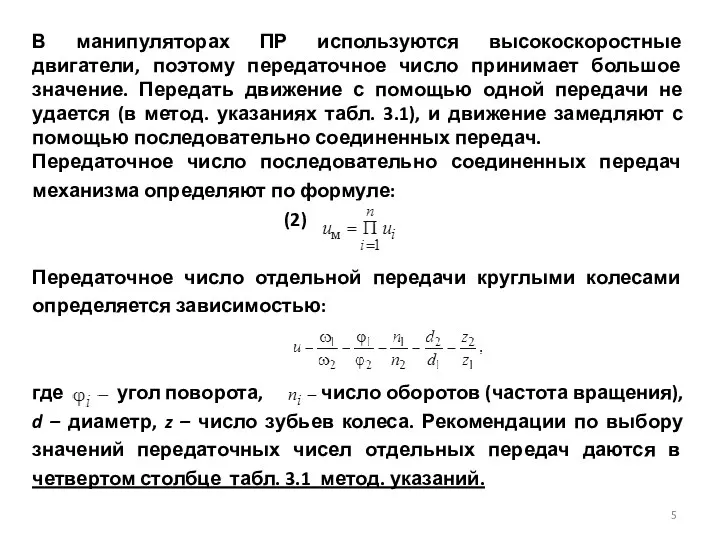
В манипуляторах ПР используются высокоскоростные двигатели, поэтому передаточное число принимает большое
В манипуляторах ПР используются высокоскоростные двигатели, поэтому передаточное число принимает большое
ВАЖНО
Значения передаточных чисел отдельных передач должны быть рационально распределены по ступеням
ВАЖНО
Значения передаточных чисел отдельных передач должны быть рационально распределены по ступеням
В курсовом проекте предполагается, что передачу движения от двигателя к руке
В курсовом проекте предполагается, что передачу движения от двигателя к руке
ПОДБОР ДВИГАТЕЛЯ ПРИВОДА ТРЕТЬЕГО ЗВЕНА
ПОДБОР ДВИГАТЕЛЯ ПРИВОДА ТРЕТЬЕГО ЗВЕНА
При повороте исполнительного звена приведенный момент инерции вычисляется по формуле:
где момент
При повороте исполнительного звена приведенный момент инерции вычисляется по формуле:
где момент
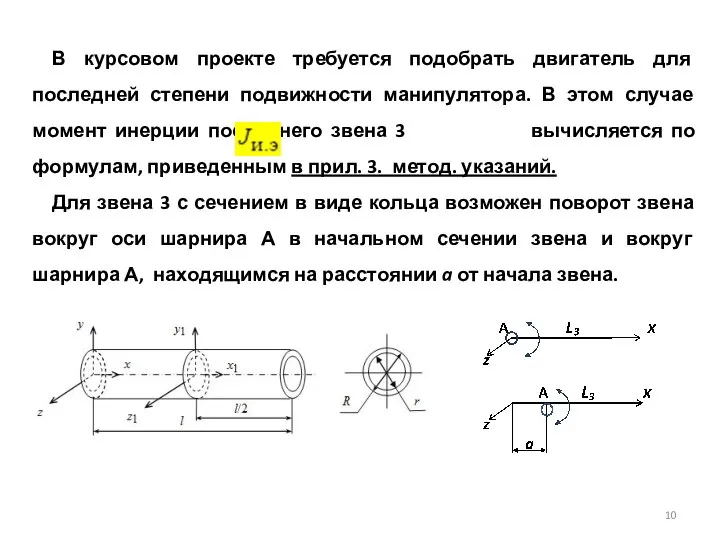
В курсовом проекте требуется подобрать двигатель для последней степени подвижности манипулятора.
В курсовом проекте требуется подобрать двигатель для последней степени подвижности манипулятора.

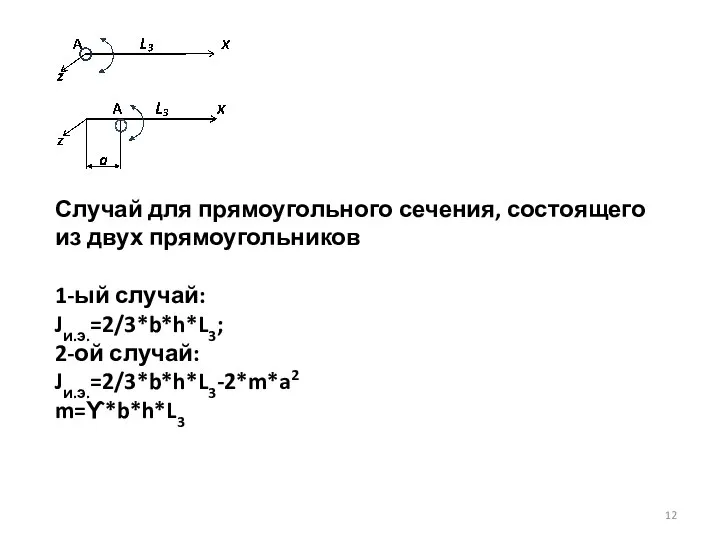
Случай для прямоугольного сечения, состоящего из двух прямоугольников
1-ый случай:
Jи.э.=2/3*b*h*L3;
2-ой случай:
Jи.э.=2/3*b*h*L3-2*m*a2
m=ϒ*b*h*L3
Случай для прямоугольного сечения, состоящего из двух прямоугольников
1-ый случай:
Jи.э.=2/3*b*h*L3;
2-ой случай:
Jи.э.=2/3*b*h*L3-2*m*a2
m=ϒ*b*h*L3
 Высота и тембр звука. Громкость звука
Высота и тембр звука. Громкость звука УРОК ФИЗИКИ В 10 КЛАССЕ Равномерное прямолинейное движение
УРОК ФИЗИКИ В 10 КЛАССЕ Равномерное прямолинейное движение  Ядерные силы. Дефект масс. Энергия связи
Ядерные силы. Дефект масс. Энергия связи Тлеющий разряд. (Лекция 5)
Тлеющий разряд. (Лекция 5) Потенциальная энергия. (Лекция 4)
Потенциальная энергия. (Лекция 4) Определение поверхностного натяжения жидкостей
Определение поверхностного натяжения жидкостей Индукция магнитного поля. Магнитный поток
Индукция магнитного поля. Магнитный поток Исследовательская работа по теме «Колокола, колокола …» Большакова Виктория СОШ № 11 г. Вязники Владимирская обл. 8 класс. Руководитель : Большакова Е.В.- учитель физики
Исследовательская работа по теме «Колокола, колокола …» Большакова Виктория СОШ № 11 г. Вязники Владимирская обл. 8 класс. Руководитель : Большакова Е.В.- учитель физики Первоначальные сведения об электрическом токе
Первоначальные сведения об электрическом токе Презентация по физике Принцип суперпозиций электростатических полей. Теорема Гаусса. Разность потенциалов
Презентация по физике Принцип суперпозиций электростатических полей. Теорема Гаусса. Разность потенциалов  Магнітні матеріали та їх використання
Магнітні матеріали та їх використання Лекция 3. Работа pn-перехода. pn-переход в состоянии термодинамического равновесия
Лекция 3. Работа pn-перехода. pn-переход в состоянии термодинамического равновесия Технология сварочных работ. История сварки
Технология сварочных работ. История сварки Презентация по физике "Инерция (физика 7 класс)" - скачать бесплатно
Презентация по физике "Инерция (физика 7 класс)" - скачать бесплатно Аварийные источники электрической энергии. Аккумуляторы. RAT
Аварийные источники электрической энергии. Аккумуляторы. RAT Оптичні явища в природі
Оптичні явища в природі Электромагниттік өріс. Электр өрісі туралы түсінік. Магнит өрісі туралы түсінік
Электромагниттік өріс. Электр өрісі туралы түсінік. Магнит өрісі туралы түсінік Топливный цикл
Топливный цикл Уравнения Максвелла. Вихревое электрическое поле
Уравнения Максвелла. Вихревое электрическое поле УРОК ФИЗИКИ В 10 КЛАССЕ Решение задач (уравнение газового состояния) Учитель Кононов Геннадий Григорьевич СОШ № 29
УРОК ФИЗИКИ В 10 КЛАССЕ Решение задач (уравнение газового состояния) Учитель Кононов Геннадий Григорьевич СОШ № 29 Контрольная работа: определите удельный тепловой поток через латунную пластину
Контрольная работа: определите удельный тепловой поток через латунную пластину Магнитные свойства вещества
Магнитные свойства вещества Продольные и поперечные магнитооптические эффекты. Распространение электромагнитной волны в среде. Уравнения Максвелла
Продольные и поперечные магнитооптические эффекты. Распространение электромагнитной волны в среде. Уравнения Максвелла ПРЕЗЕНТАЦИЮ ПО ФИЗИКЕ на тему: « СОЗДАНИЕ ВЕЧНОГО ДВИГАТЕЛЯ» Подготовила Ученица 10 класс МОУ СОШ п. Гаврилово Басс Людмила
ПРЕЗЕНТАЦИЮ ПО ФИЗИКЕ на тему: « СОЗДАНИЕ ВЕЧНОГО ДВИГАТЕЛЯ» Подготовила Ученица 10 класс МОУ СОШ п. Гаврилово Басс Людмила Измерение удельного заряда электрона методом магнетрона
Измерение удельного заряда электрона методом магнетрона Проектная деятельность на уроках физики
Проектная деятельность на уроках физики Лекция 15. Тема: Закон Био-Савара - Лапласа
Лекция 15. Тема: Закон Био-Савара - Лапласа Что такое сила трения, и что случится, если ее отменить? Выполнила: ученица 7 «а» класса средней школы № 809 Мария Кульбака
Что такое сила трения, и что случится, если ее отменить? Выполнила: ученица 7 «а» класса средней школы № 809 Мария Кульбака