- Основные понятия и аксиомы статики. Связи и их реакции

Содержание
- 2. МЕХАНИКА – наука о механическом движении и взаимодействии тел. Механическое движение – это изменение с течением
- 3. Механика – одна из самых древних наук. Термин «механика» ввел выдающийся философ древности - Аристотель
- 4. Первые основы учения о равновесии тел содержатся в трудах Архимеда
- 5. Ученые-механики помогли в освоении космоса. Русский ученый, изобретатель К.Э. Циолковский – заложил теорию космических полетов. Ученый,
- 6. По словам академика А.Ю. Ишлинского: Механика имеет отношение ко всем явлениям природы и творениям техники, ко
- 7. Детали машин Детали машин
- 8. Основные понятия статики Статика – часть теоретической механики, изучает условия равновесия тел. Равновесие – состояние покоя
- 9. Сила – мера механического взаимодействия тел. Сила имеет: Значение (модуль) Направление Точку приложения Линию действия Единица
- 10. 2. Основные аксиомы статики сформулированы английским ученым Исааком Ньютоном
- 11. Аксиома №1– аксиома инерции (первый закон Ньютона) Всякое тело находится в равновесии, пока какие-нибудь силы не
- 12. Аксиома №2– аксиома взаимодействия (третий закон Ньютона) Силы взаимодействия двух тел всегда равны по модулю, направлены
- 13. Аксиома №3– условие равновесия Для равновесия свободного твердого тела, которое находится под действием двух сил, необходимо
- 14. Аксиома №4 Равновесие твердого тела не нарушится, если к нему приложить или удалить уравновешенную систему сил.
- 15. Следствие из аксиом №3 и 4 Механическое состояние твердого тела не нарушится, если силу перенести вдоль
- 16. Аксиома №5– аксиома параллелограмма Если две силы приложены к телу в одной точке, то чтобы найти
- 17. Понятия: Совокупность приложенных к телу сил называется системой сил. Система сил уравновешена, если при приложении или
- 18. 3. Связи – это ограничения, которые наложены на тело в пространстве,не дающие ему перемещаться в том
- 19. Правило определения направления реакции связи: Направление реакции всегда противоположно направлению перемещения, которое ограничивается данной связью.
- 20. Принцип освобождения от связей: Всякое несвободное тело можно рассматривать как свободное, если отбросить связи и заменить
- 21. Виды связей: 1. Идеально гладкая плоскость Реакция направлена перпендикулярно опорной плоскости в сторону тела. R =
- 22. 2. Идеально гладкая поверхность: Реакция направлена перпендикулярно касательной плоскости в сторону тела. R = G
- 23. 3. Опирание на ребро Реакция направлена перпендикулярно к поверхности самого тела.
- 24. 4. Гибкая связь Реакция гибкой связи направлена вдоль связи от тела к точке подвеса.
- 25. 5. Шарнир –это подвижное соединение двух тел, допускающее вращение вокруг общей оси.
- 26. Шарнирно неподвижная опора Реакцию раскладывают на две составляющие по оси У и Х. Шарнирно подвижная опора
- 27. Идеально гладкий подпятник Является сочетанием шарнира и опорной плоскости, поэтому его реакция раскладывается на три составляющие
- 28. 6. Стержень, закрепленный шарнирно Реакции направлены вдоль линии, соединяющей шарниры.
- 30. Скачать презентацию
МЕХАНИКА – наука о механическом движении и взаимодействии тел.
Механическое движение –
МЕХАНИКА – наука о механическом движении и взаимодействии тел.
Механическое движение –
Механика – одна из самых древних наук.
Термин «механика» ввел выдающийся философ
Механика – одна из самых древних наук.
Термин «механика» ввел выдающийся философ
Первые основы учения о равновесии тел содержатся в трудах Архимеда
Первые основы учения о равновесии тел содержатся в трудах Архимеда
Ученые-механики помогли в освоении космоса.
Русский ученый, изобретатель К.Э. Циолковский –
Ученые-механики помогли в освоении космоса.
Русский ученый, изобретатель К.Э. Циолковский –
По словам академика А.Ю. Ишлинского:
Механика имеет отношение ко всем явлениям природы
По словам академика А.Ю. Ишлинского:
Механика имеет отношение ко всем явлениям природы
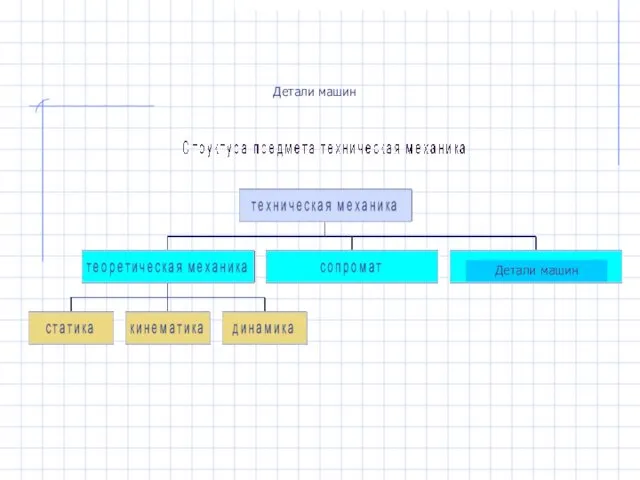
Детали машин
Детали машин
Детали машин
Детали машин

Основные понятия статики
Статика – часть теоретической механики, изучает условия равновесия тел.
Равновесие
Основные понятия статики
Статика – часть теоретической механики, изучает условия равновесия тел.
Равновесие
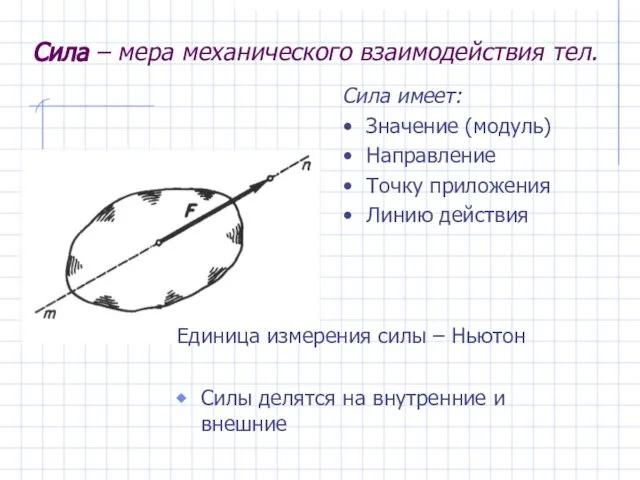
Сила – мера механического взаимодействия тел.
Сила имеет:
Значение (модуль)
Направление
Точку приложения
Линию действия
Единица измерения
Сила – мера механического взаимодействия тел.
Сила имеет:
Значение (модуль)
Направление
Точку приложения
Линию действия
Единица измерения
2. Основные аксиомы статики сформулированы английским ученым Исааком Ньютоном
2. Основные аксиомы статики сформулированы английским ученым Исааком Ньютоном
Аксиома №1– аксиома инерции (первый закон Ньютона)
Всякое тело находится в равновесии,
Аксиома №1– аксиома инерции (первый закон Ньютона)
Всякое тело находится в равновесии,
Аксиома №2– аксиома взаимодействия (третий закон Ньютона)
Силы взаимодействия двух тел всегда
Аксиома №2– аксиома взаимодействия (третий закон Ньютона)
Силы взаимодействия двух тел всегда
Аксиома №3– условие равновесия
Для равновесия свободного твердого тела, которое находится под
Аксиома №3– условие равновесия
Для равновесия свободного твердого тела, которое находится под
Аксиома №4
Равновесие твердого тела не нарушится, если к нему приложить или
Аксиома №4
Равновесие твердого тела не нарушится, если к нему приложить или
Следствие из аксиом №3 и 4
Механическое состояние твердого тела не нарушится,
Следствие из аксиом №3 и 4
Механическое состояние твердого тела не нарушится,
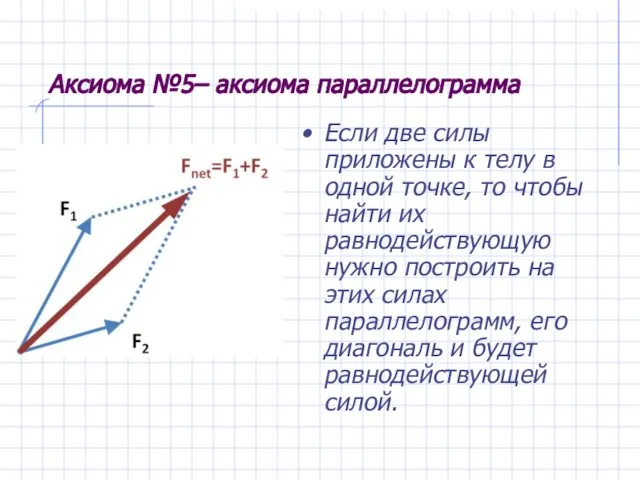
Аксиома №5– аксиома параллелограмма
Если две силы приложены к телу в одной
Аксиома №5– аксиома параллелограмма
Если две силы приложены к телу в одной
Понятия:
Совокупность приложенных к телу сил называется системой сил.
Система сил уравновешена, если
Понятия:
Совокупность приложенных к телу сил называется системой сил.
Система сил уравновешена, если
3.
Связи – это ограничения, которые наложены на тело в пространстве,не
3.
Связи – это ограничения, которые наложены на тело в пространстве,не
Правило определения направления реакции связи:
Направление реакции всегда противоположно направлению перемещения, которое
Правило определения направления реакции связи:
Направление реакции всегда противоположно направлению перемещения, которое
Принцип освобождения от связей:
Всякое несвободное тело можно рассматривать как свободное, если
Принцип освобождения от связей:
Всякое несвободное тело можно рассматривать как свободное, если
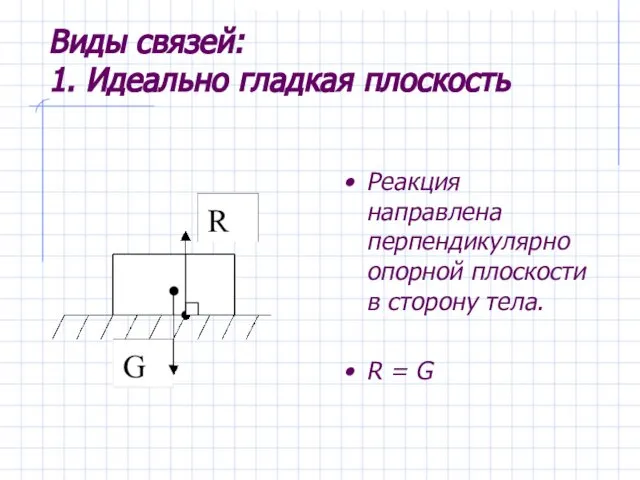
Виды связей:
1. Идеально гладкая плоскость
Реакция направлена перпендикулярно опорной плоскости в сторону
Виды связей:
1. Идеально гладкая плоскость
Реакция направлена перпендикулярно опорной плоскости в сторону
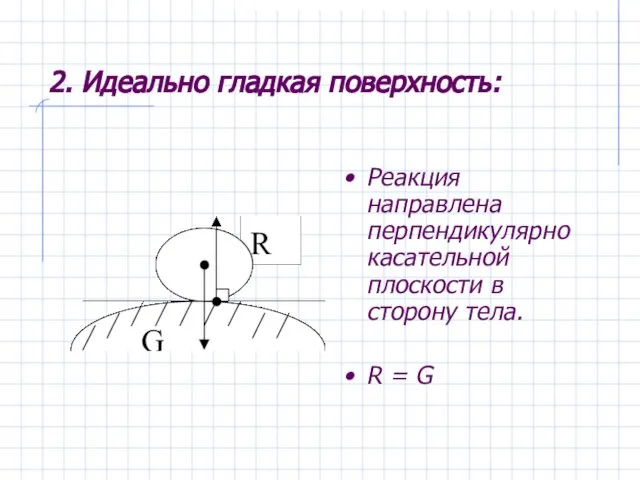
2. Идеально гладкая поверхность:
Реакция направлена перпендикулярно касательной плоскости в сторону тела.
R
2. Идеально гладкая поверхность:
Реакция направлена перпендикулярно касательной плоскости в сторону тела.
R
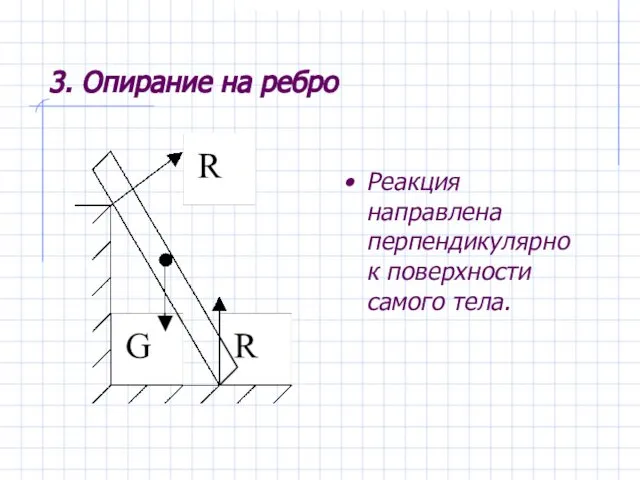
3. Опирание на ребро
Реакция направлена перпендикулярно к поверхности самого тела.
3. Опирание на ребро
Реакция направлена перпендикулярно к поверхности самого тела.
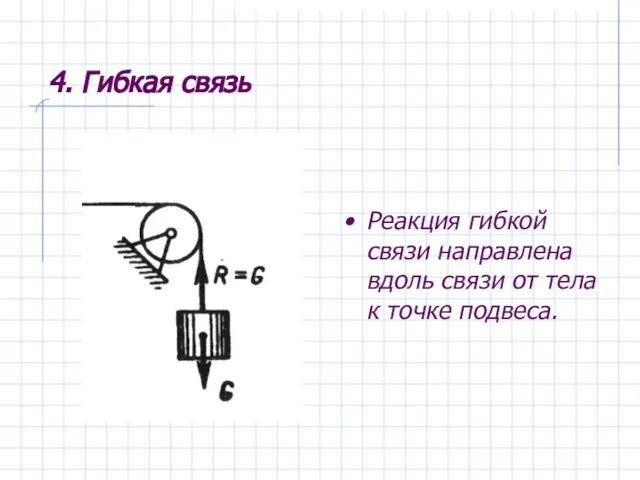
4. Гибкая связь
Реакция гибкой связи направлена вдоль связи от тела к
4. Гибкая связь
Реакция гибкой связи направлена вдоль связи от тела к

5. Шарнир –это подвижное соединение двух тел, допускающее вращение вокруг общей
5. Шарнир –это подвижное соединение двух тел, допускающее вращение вокруг общей
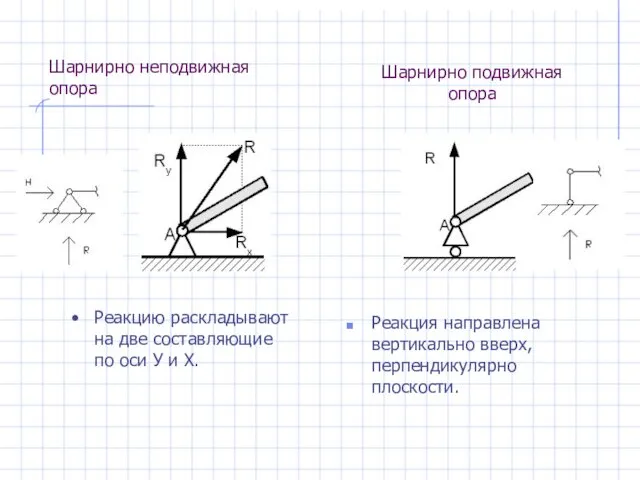
Шарнирно неподвижная опора
Реакцию раскладывают на две составляющие по оси У и
Шарнирно неподвижная опора
Реакцию раскладывают на две составляющие по оси У и
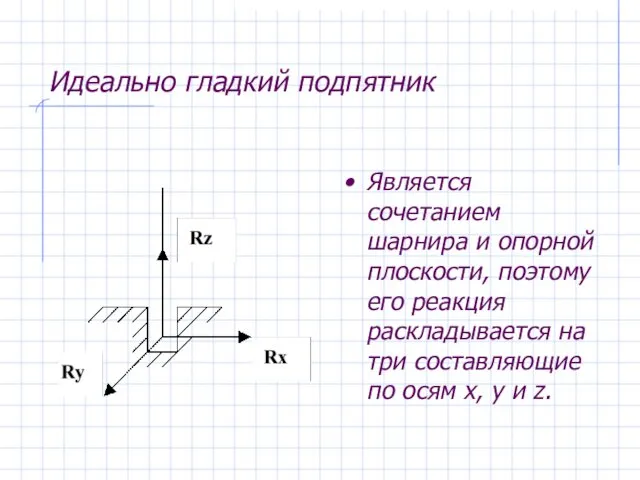
Идеально гладкий подпятник
Является сочетанием шарнира и опорной плоскости, поэтому его реакция
Идеально гладкий подпятник
Является сочетанием шарнира и опорной плоскости, поэтому его реакция
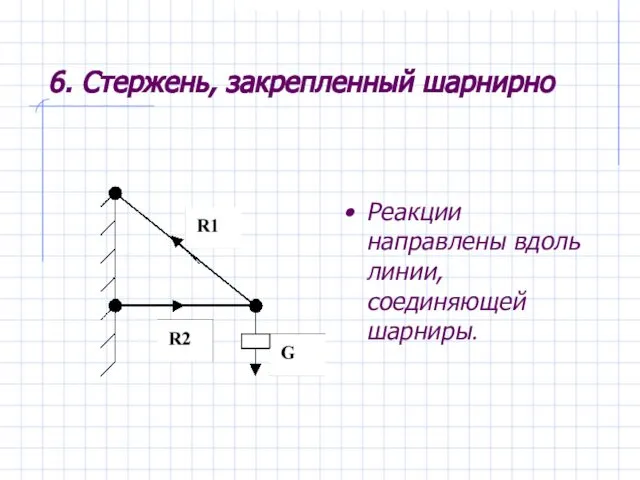
6. Стержень, закрепленный шарнирно
Реакции направлены вдоль линии, соединяющей шарниры.
6. Стержень, закрепленный шарнирно
Реакции направлены вдоль линии, соединяющей шарниры.
 Неравномерное движение. Мгновенная скорость
Неравномерное движение. Мгновенная скорость Контроль и метрологическое обеспечение средств и систем автоматизации
Контроль и метрологическое обеспечение средств и систем автоматизации Механическая работа. Единицы работы
Механическая работа. Единицы работы Конечно-элементное моделирование, как новый способ прогноза геомеханических процессов при подработке земной поверхности
Конечно-элементное моделирование, как новый способ прогноза геомеханических процессов при подработке земной поверхности Электрический ток в различных средах
Электрический ток в различных средах Энергия
Энергия Исследование тепловых процессов системы «человек - окружающая среда» в условиях низких температур
Исследование тепловых процессов системы «человек - окружающая среда» в условиях низких температур Многоэлектронные атомы
Многоэлектронные атомы Теория фотоэффекта
Теория фотоэффекта 8415_____ (1)
8415_____ (1) Опиливание металла
Опиливание металла Презентация по физике "История термометра" - скачать
Презентация по физике "История термометра" - скачать  Физические модели. Постановка задачи
Физические модели. Постановка задачи Стандартная обработка результатов многократных наблюдений
Стандартная обработка результатов многократных наблюдений занятия 123
занятия 123 Спектроскопия лазерных кристаллов
Спектроскопия лазерных кристаллов Методы определения реологических свойств
Методы определения реологических свойств Единица измерения. Сантиметр
Единица измерения. Сантиметр Раздел 2. Акустические преобразователи. Основные характеристики
Раздел 2. Акустические преобразователи. Основные характеристики Лекция 12
Лекция 12 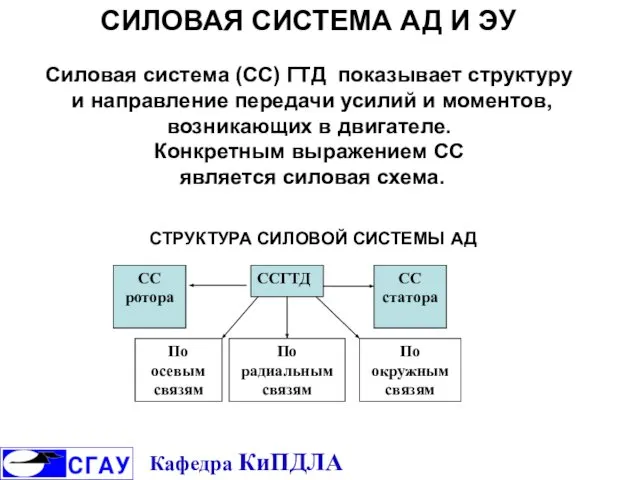 Силовая система АД и ЭУ
Силовая система АД и ЭУ «ПОСТРОЕНИЕ ИЗОБРАЖЕНИЯ В ЛИНЗАХ»
«ПОСТРОЕНИЕ ИЗОБРАЖЕНИЯ В ЛИНЗАХ» II Закон термодинамики. Энтропия “S”- термодинамическая функция состояния [Дж/моль К] (Клаузиус)
II Закон термодинамики. Энтропия “S”- термодинамическая функция состояния [Дж/моль К] (Клаузиус) Презентация по физике на тему: «Двигатель внутреннего сгорания»
Презентация по физике на тему: «Двигатель внутреннего сгорания»  Архимедова сила
Архимедова сила Электромагнитные волны. (Лекция 30)
Электромагнитные волны. (Лекция 30) Второе начало термодинамики. Энтропия
Второе начало термодинамики. Энтропия Электрическое напряжение
Электрическое напряжение