- Основы биомеханики. Механические свойства биологических тканей

Содержание
- 2. ОСНОВЫ БИОМЕХАНИКИ Механические свойства биологических тканей.
- 3. БИОМЕХАНИКА – это раздел биофизики, изучающий механические свойства живых тканей, органов и организма в целом, а
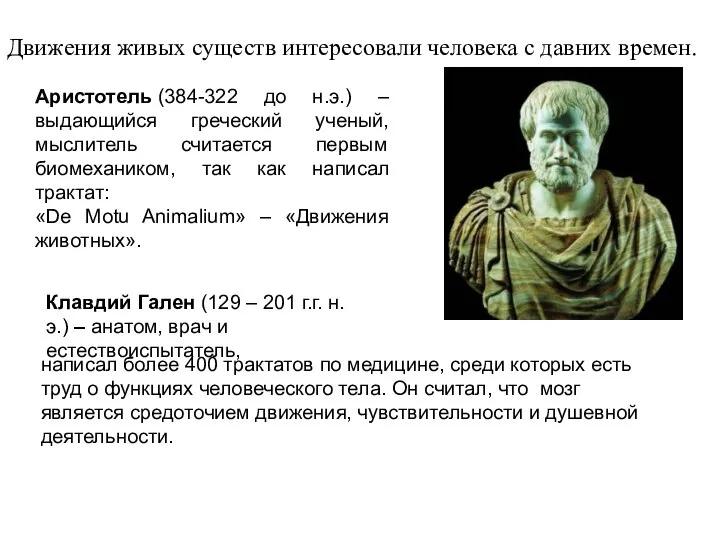
- 4. Движения живых существ интересовали человека с давних времен. Аристотель (384-322 до н.э.) – выдающийся греческий ученый,
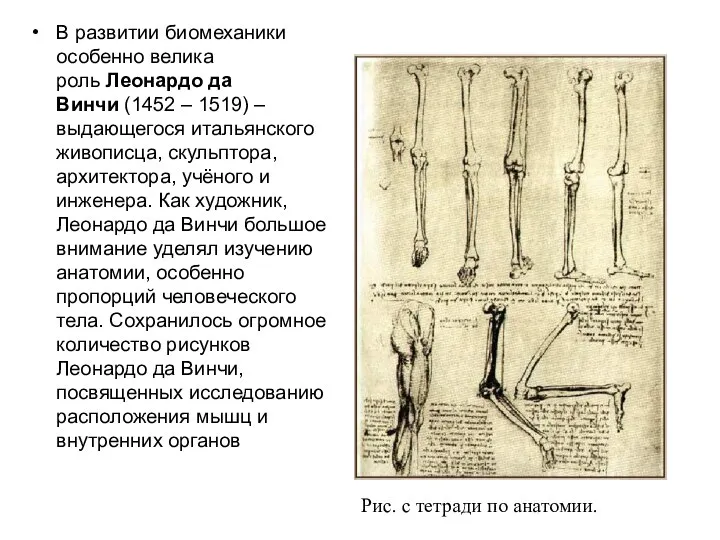
- 5. В развитии биомеханики особенно велика роль Леонардо да Винчи (1452 – 1519) – выдающегося итальянского живописца,
- 6. Итальянский астроном, математик и врач Джованни Альфонсо Борелли (1608-1679) внес большой вклад в развитие биомеханики как
- 7. Жак Луи Дагер (1787 – 1851) в 1839 году им был разработан первый практический способ фотографии
- 8. Петр Францевич Лесгафт (1837 – 1909) – известный анатом, педагог рассмотрел ряд проблем, смежных с биомеханикой:
- 9. Николай Александрович Бернштейн (1896 – 1966) выдающийся русский физиолог и биомеханик используя методику циклосъемки, получил огромный
- 10. Биомеханика – смежная наука. на «стыке» двух наук: биологии – науки о жизни; механики – науки
- 11. Простейшей формой движения материи является механическое движение, которое состоит в перемещении тел или частей тела друг
- 12. КИНЕМАТИКА Определение положения точки с помощью координат x = x(t), y = y(t) и z =
- 13. Виды движения: Поступательное движение – это такое движение твёрдого тела, при котором прямая, соединяющая две любые
- 14. Линию, которую описывает материальная точка при своем движении в пространстве, называют траекторией. В зависимости от формы
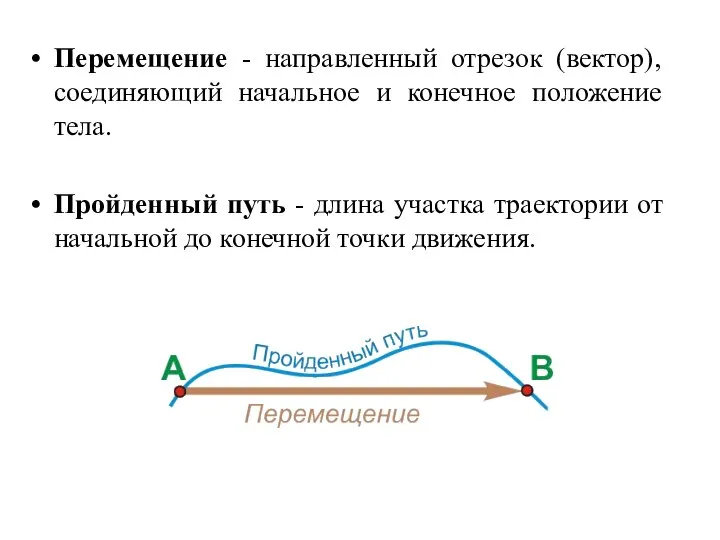
- 15. Перемещение - направленный отрезок (вектор), соединяющий начальное и конечное положение тела. Пройденный путь - длина участка
- 16. Скорость это векторная величина, характеризующая быстроту изменения координаты тела с течением времени, или первая производная координаты
- 17. Движение тела по окружности является частным случаем криволинейного движения. Наряду с вектором перемещения удобно рассматривать угловое
- 18. Линейное и угловое перемещения при движении тела по окружности.
- 19. Угловая скорость измеряется в рад/с. Связь между модулем линейной скорости V и угловой скоростью ω: V=
- 20. Таким образом, линейные скорости точек вращающегося тела пропорциональны их расстояниям от оси вращения (чем дальше удалена
- 21. При равномерном движении тела по окружности величины V и ω остаются неизменными. В этом случае при
- 22. Модуль центростремительного ускорения связан с линейной V и угловой ω скоростями соотношениями: Если тело движется по
- 23. Направление вектора полного ускорения определяется в каждой точке круговой траектории величинами нормального и касательного ускорений
- 24. Масса тела (m) – мера инертности тела при поступательном движении. Момент инерции тела (J ) –
- 25. ДИНАМИКА Изменение скорости движения тел происходит под действием сил Сила – это физическая величина, характеризующая взаимодействие
- 26. Первый закон Ньютона : Существуют такие системы отсчета, называемые инерциальными, относительно которых изолированные поступательно движущиеся тела
- 27. Если на тело одновременно действуют несколько сил то под силой в формуле, выражающей второй закон Ньютона,
- 28. Закон сохранения импульса: импульс замкнутой (изолированной) системы не изменяется с течением времени. Закон сохранения импульса справедлив
- 29. Сила – равнодействующая силы тяжести и силы реакции опоры, действующих на лыжника на гладкой горе. Сила
- 30. Третий закон Ньютона. Тела действуют друг на друга с силами, равными по модулю и противоположными по
- 31. Рис. иллюстрирует третий закон Ньютона.
- 32. Человек действует на груз с такой же по модулю силой, с какой груз действует на человека.
- 33. СОЕДИНЕНИЯ И РЫЧАГИ
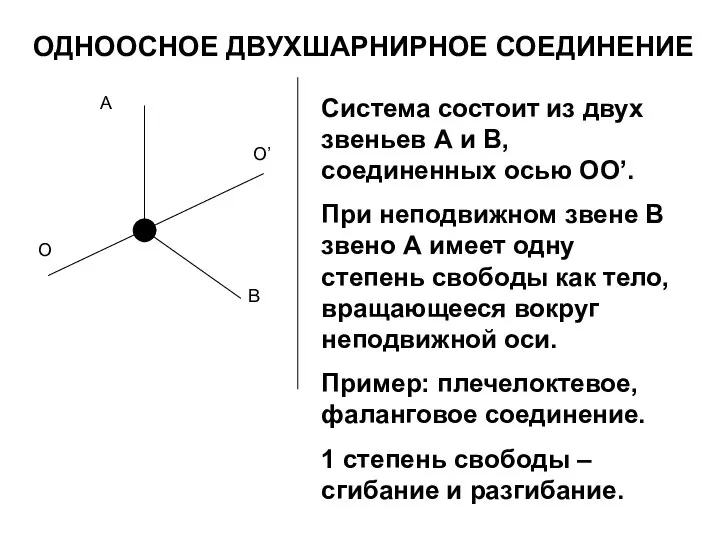
- 34. ОДНООСНОЕ ДВУХШАРНИРНОЕ СОЕДИНЕНИЕ О’ Система состоит из двух звеньев А и В, соединенных осью ОО’. При
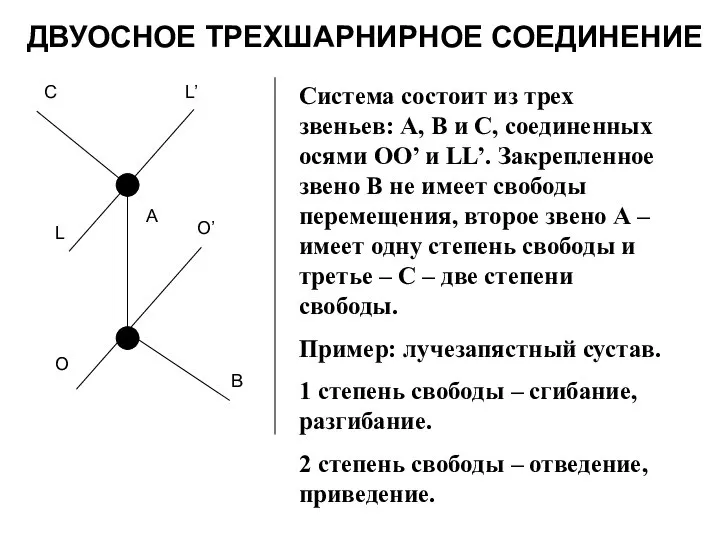
- 35. ДВУОСНОЕ ТРЕХШАРНИРНОЕ СОЕДИНЕНИЕ Система состоит из трех звеньев: А, В и С, соединенных осями ОО’ и
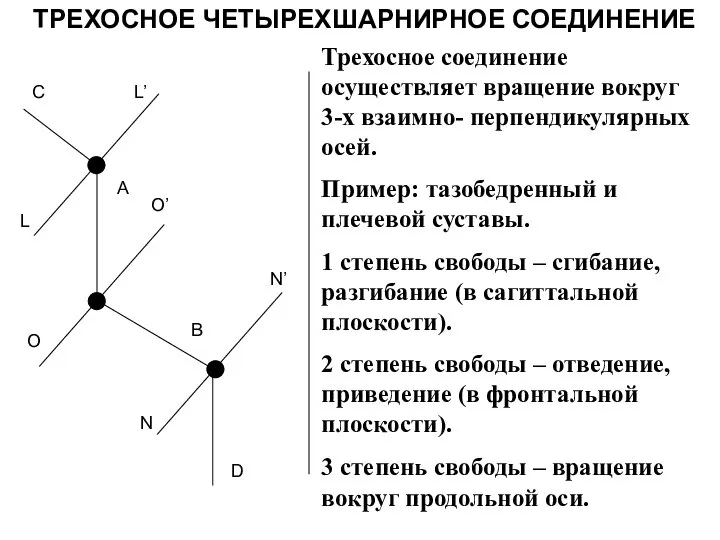
- 36. ТРЕХОСНОЕ ЧЕТЫРЕХШАРНИРНОЕ СОЕДИНЕНИЕ L N’ Трехосное соединение осуществляет вращение вокруг 3-х взаимно- перпендикулярных осей. Пример: тазобедренный
- 37. Рычаг- твердое тело, имеющее неподвижную ось вращения, на которое действуют силы, стремящиеся повернуть его вокруг этой
- 38. ВИДЫ РЫЧАГОВ Рычаг I рода Рычаг II рода Рычаг силы Рычаг скорости
- 39. РЫЧАГ ПЕРВОГО РОД Рычаг первого рода- это рычаг, ось вращения которого расположена между точками приложения сил,
- 40. d1 d2 А В Ось вращения плечи сил Рычаг первого рода
- 41. А B Б dB dБ (А) точка опоры (ось вращения) (В) точка сопротивления (сила тяжести) (Б)
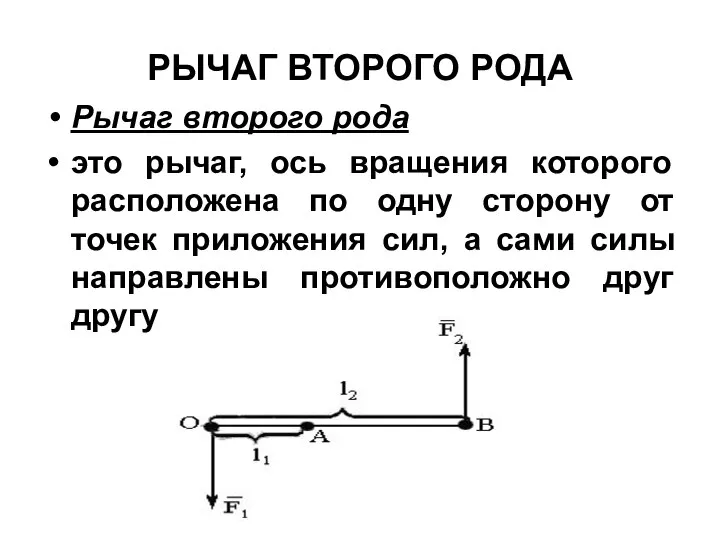
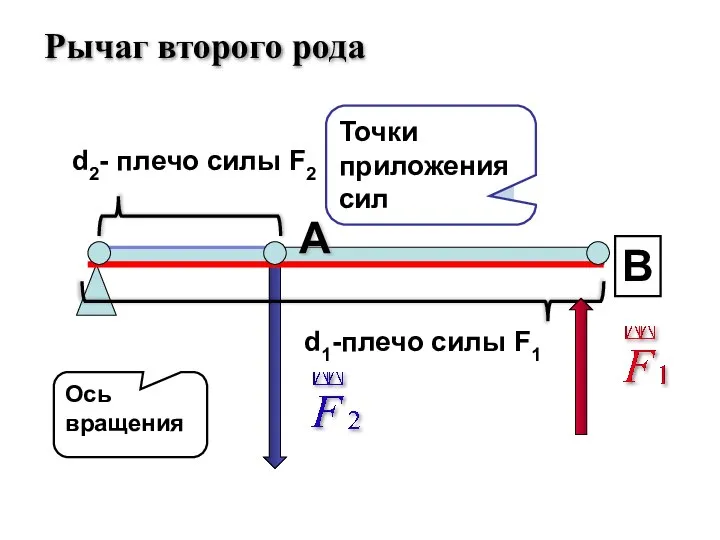
- 42. Рычаг второго рода это рычаг, ось вращения которого расположена по одну сторону от точек приложения сил,
- 43. d1-плечо силы F1 В d2- плечо силы F2 Рычаг второго рода Ось вращения А
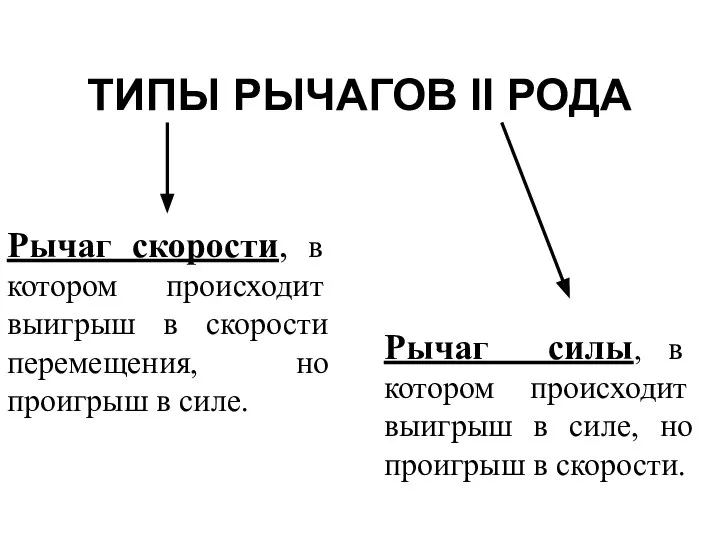
- 44. ТИПЫ РЫЧАГОВ II РОДА Рычаг скорости, в котором происходит выигрыш в скорости перемещения, но проигрыш в
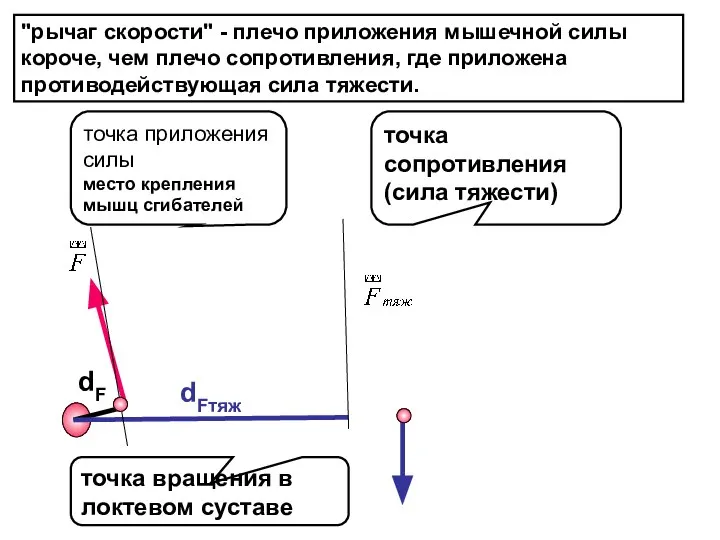
- 45. "рычаг скорости" - плечо приложения мышечной силы короче, чем плечо сопротивления, где приложена противодействующая сила тяжести.
- 46. У второго вида одноплечего рычага - "рычага скорости" - плечо приложения мышечной силы короче, чем плечо
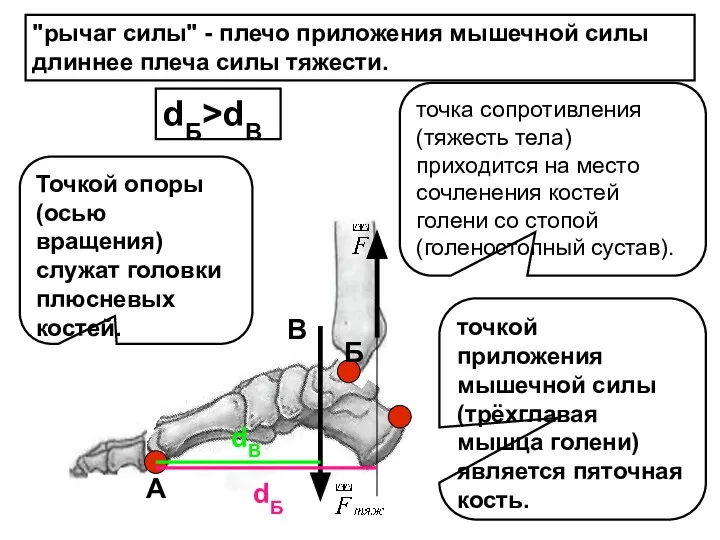
- 47. А В Б dБ dB "рычаг силы" - плечо приложения мышечной силы длиннее плеча силы тяжести.
- 48. Первый вид рычага второго рода - "рычаг силы" - имеет место в том случае, если плечо
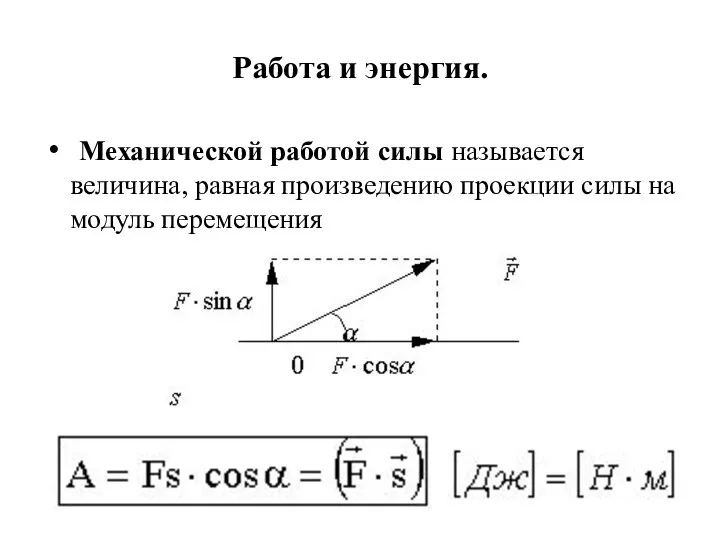
- 49. Работа и энергия. Механической работой силы называется величина, равная произведению проекции силы на модуль перемещения
- 50. Если сила переменная, то перемещение разбивают на бесконечно малые отрезки, на которых сила постоянна, затем суммируют.
- 51. Эффективность совершения работы характеризуется мощностью. Мощность - величина, равная отношению работы к промежутку времени, в течении
- 52. Коэффициент полезного действия (КПД) равен отношению полезной работы, совершенной машиной, к полной работе.
- 53. Энергия –физическая величина, характеризующая способность системы совершить работу. Виды энергии : механическая, тепловая, электрическая, электромагнитная, химическая,
- 54. Изменение энергии системы при переходе из одного состояния в другое равно совершаемой системой (или над системой)работе.
- 55. Механическая энергия изолированной системы равна сумме кинетической и потенциальной энергии и не меняется со временем, если
- 57. Скачать презентацию
ОСНОВЫ БИОМЕХАНИКИ
Механические свойства биологических тканей.
ОСНОВЫ БИОМЕХАНИКИ
Механические свойства биологических тканей.
БИОМЕХАНИКА – это раздел биофизики, изучающий механические свойства живых тканей, органов
БИОМЕХАНИКА – это раздел биофизики, изучающий механические свойства живых тканей, органов
Движения живых существ интересовали человека с давних времен.
Аристотель (384-322 до н.э.)
Движения живых существ интересовали человека с давних времен.
Аристотель (384-322 до н.э.)
В развитии биомеханики особенно велика роль Леонардо да Винчи (1452 – 1519) –
В развитии биомеханики особенно велика роль Леонардо да Винчи (1452 – 1519) –
Итальянский астроном, математик и врач Джованни Альфонсо Борелли (1608-1679) внес большой вклад в
Итальянский астроном, математик и врач Джованни Альфонсо Борелли (1608-1679) внес большой вклад в
Жак Луи Дагер
(1787 – 1851)
в 1839 году им был разработан первый
Жак Луи Дагер
(1787 – 1851)
в 1839 году им был разработан первый
Петр Францевич Лесгафт (1837 – 1909) – известный анатом, педагог рассмотрел ряд
Петр Францевич Лесгафт (1837 – 1909) – известный анатом, педагог рассмотрел ряд
Николай Александрович Бернштейн (1896 – 1966) выдающийся русский физиолог и биомеханик
используя
Николай Александрович Бернштейн (1896 – 1966) выдающийся русский физиолог и биомеханик
используя
Биомеханика – смежная наука.
на «стыке» двух наук:
биологии – науки о жизни;
механики –
Биомеханика – смежная наука.
на «стыке» двух наук:
биологии – науки о жизни;
механики –
Простейшей формой движения материи является механическое движение, которое состоит в перемещении
Простейшей формой движения материи является механическое движение, которое состоит в перемещении
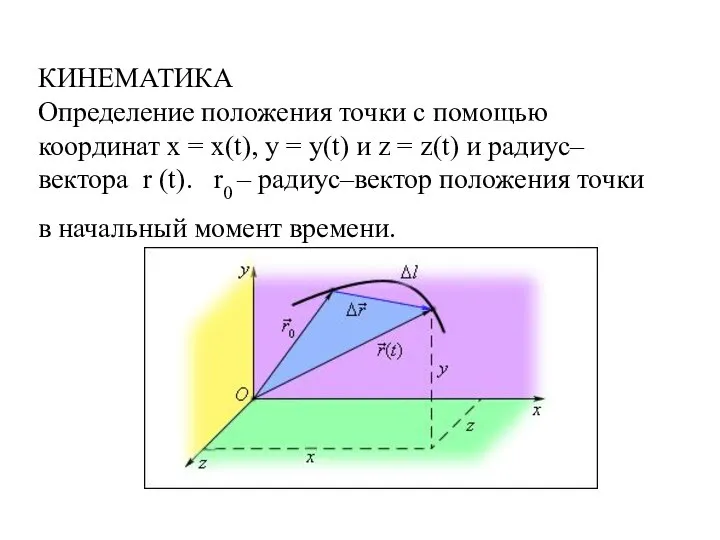
КИНЕМАТИКА
Определение положения точки с помощью координат x = x(t), y = y(t) и z = z(t) и
КИНЕМАТИКА Определение положения точки с помощью координат x = x(t), y = y(t) и z = z(t) и
Виды движения:
Поступательное движение – это такое движение твёрдого тела, при котором
Виды движения: Поступательное движение – это такое движение твёрдого тела, при котором
Линию, которую описывает материальная точка при своем движении в пространстве,
Линию, которую описывает материальная точка при своем движении в пространстве,
Перемещение - направленный отрезок (вектор), соединяющий начальное и конечное положение тела.
Пройденный
Перемещение - направленный отрезок (вектор), соединяющий начальное и конечное положение тела.
Пройденный
Скорость это векторная величина, характеризующая быстроту изменения координаты тела с течением
Скорость это векторная величина, характеризующая быстроту изменения координаты тела с течением
Движение тела по окружности является частным случаем криволинейного движения.
Наряду с вектором
Движение тела по окружности является частным случаем криволинейного движения.
Наряду с вектором
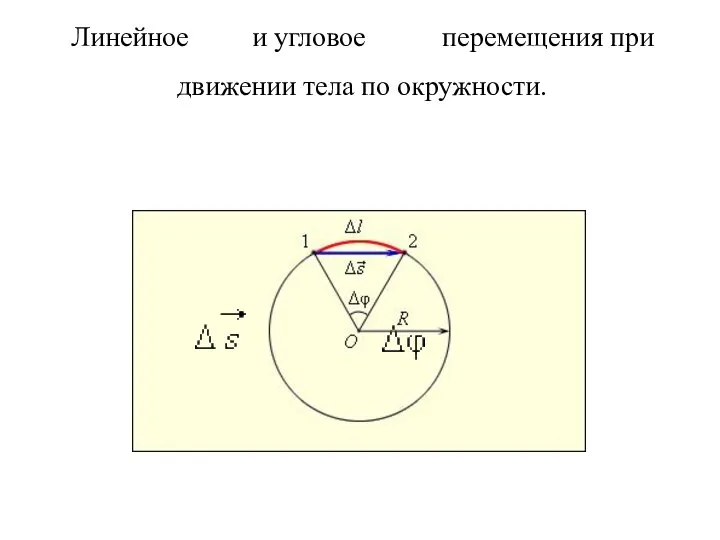
Линейное и угловое перемещения при движении тела по окружности.
Линейное и угловое перемещения при движении тела по окружности.
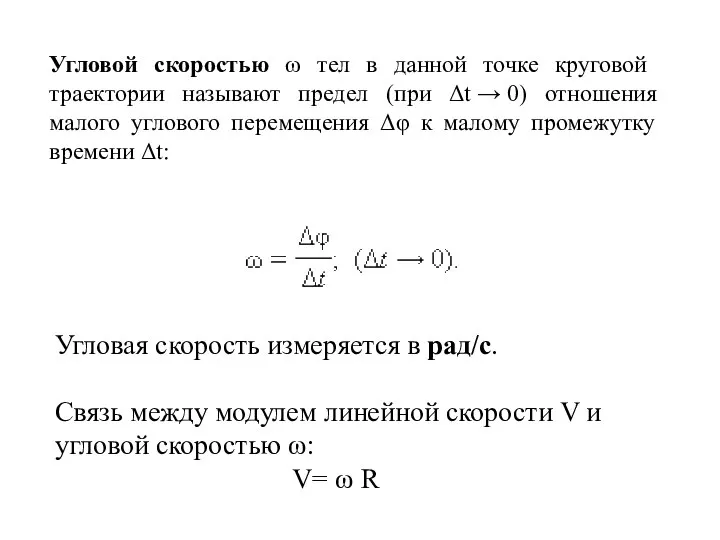
Угловая скорость измеряется в рад/с.
Связь между модулем линейной скорости V
Угловая скорость измеряется в рад/с. Связь между модулем линейной скорости V
Таким образом, линейные скорости точек вращающегося тела пропорциональны их расстояниям от
Таким образом, линейные скорости точек вращающегося тела пропорциональны их расстояниям от
При равномерном движении тела по окружности величины V и ω остаются
При равномерном движении тела по окружности величины V и ω остаются
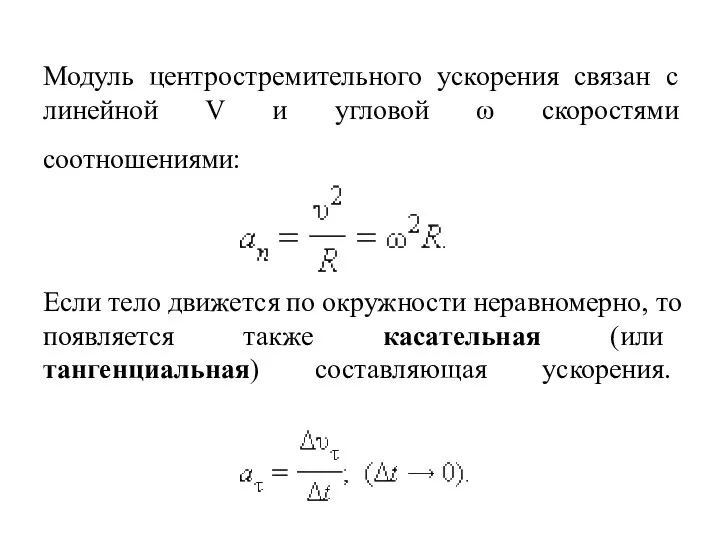
Модуль центростремительного ускорения связан с линейной V и угловой ω скоростями
Модуль центростремительного ускорения связан с линейной V и угловой ω скоростями
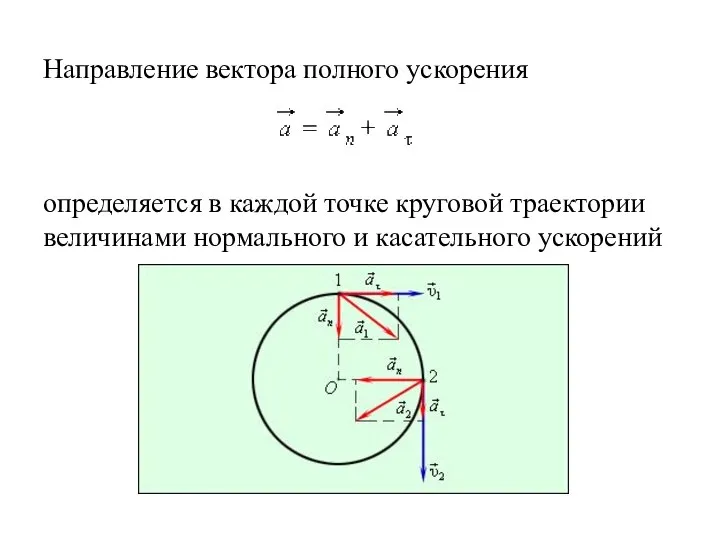
Направление вектора полного ускорения
определяется в каждой точке круговой траектории величинами
Направление вектора полного ускорения определяется в каждой точке круговой траектории величинами
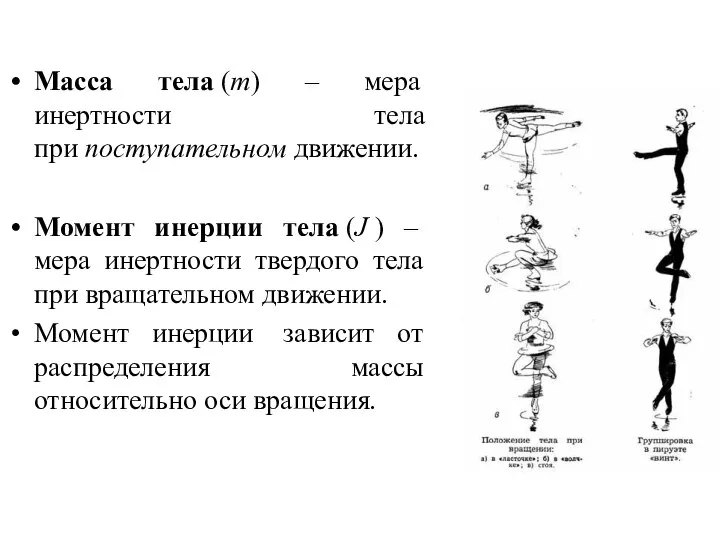
Масса тела (m) – мера инертности тела при поступательном движении.
Момент инерции тела (J ) –
Масса тела (m) – мера инертности тела при поступательном движении.
Момент инерции тела (J ) –
ДИНАМИКА
Изменение скорости движения тел происходит под действием сил
Сила – это физическая величина,
ДИНАМИКА
Изменение скорости движения тел происходит под действием сил
Сила – это физическая величина,
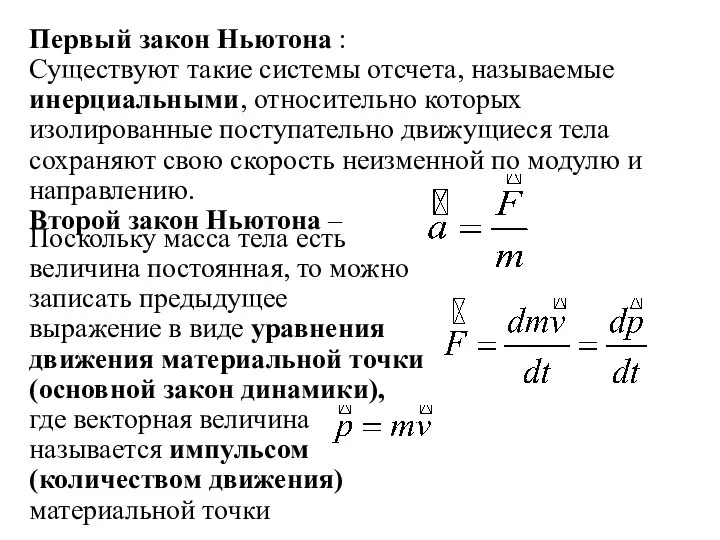
Первый закон Ньютона :
Существуют такие системы отсчета, называемые инерциальными, относительно
Первый закон Ньютона : Существуют такие системы отсчета, называемые инерциальными, относительно
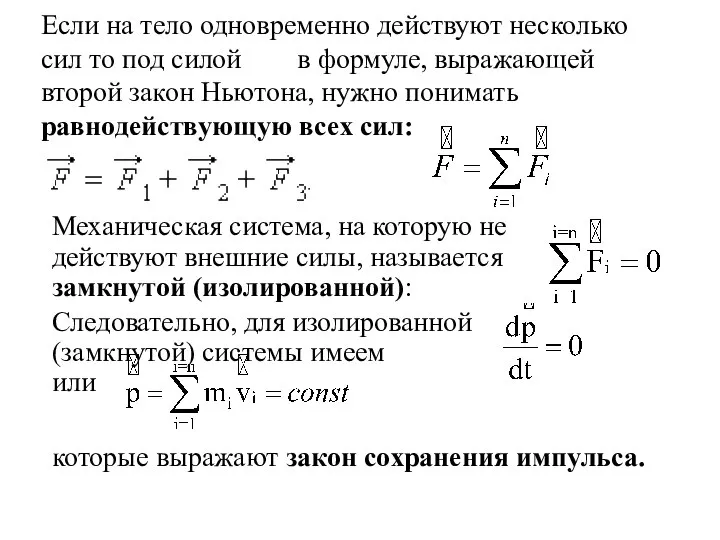
Если на тело одновременно действуют несколько сил то под силой в
Если на тело одновременно действуют несколько сил то под силой в
Закон сохранения импульса:
импульс замкнутой (изолированной) системы не изменяется с течением
Закон сохранения импульса:
импульс замкнутой (изолированной) системы не изменяется с течением
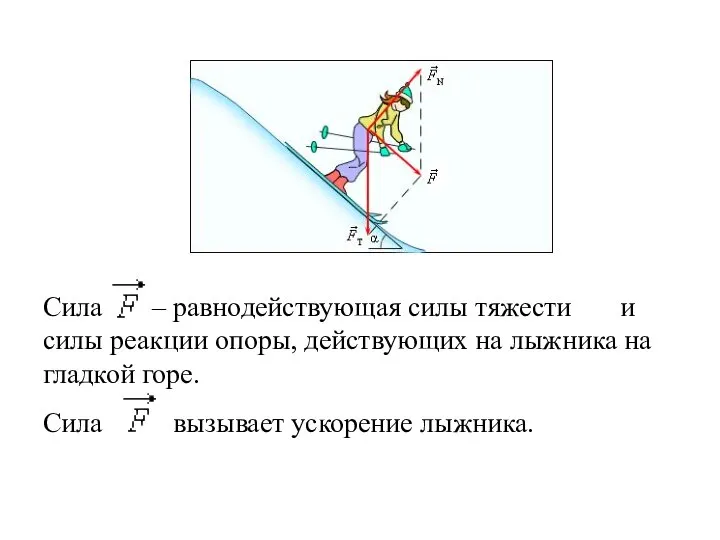
Сила – равнодействующая силы тяжести и силы реакции опоры, действующих на
Сила – равнодействующая силы тяжести и силы реакции опоры, действующих на
Третий закон Ньютона.
Тела действуют друг на друга с силами, равными
Третий закон Ньютона. Тела действуют друг на друга с силами, равными
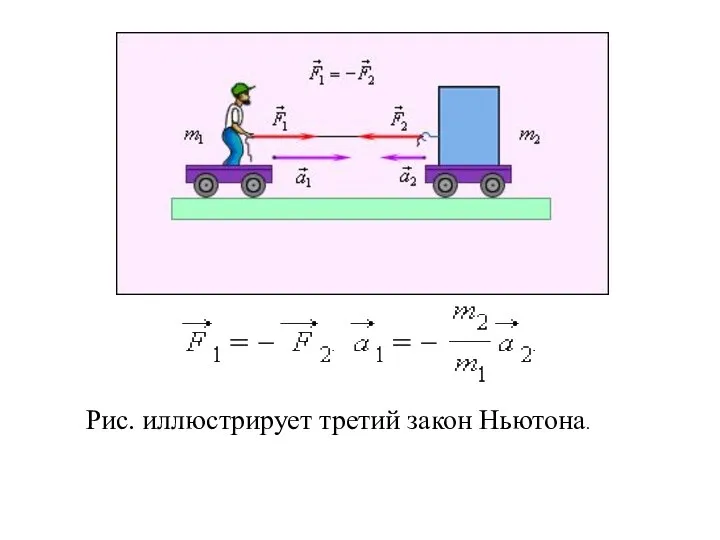
Рис. иллюстрирует третий закон Ньютона.
Рис. иллюстрирует третий закон Ньютона.
Человек действует на груз с такой же по модулю силой, с
Человек действует на груз с такой же по модулю силой, с
СОЕДИНЕНИЯ И РЫЧАГИ
СОЕДИНЕНИЯ И РЫЧАГИ
ОДНООСНОЕ ДВУХШАРНИРНОЕ СОЕДИНЕНИЕ
О’
Система состоит из двух звеньев А и В,
ОДНООСНОЕ ДВУХШАРНИРНОЕ СОЕДИНЕНИЕ
О’
Система состоит из двух звеньев А и В,
ДВУОСНОЕ ТРЕХШАРНИРНОЕ СОЕДИНЕНИЕ
Система состоит из трех звеньев: А, В и
ДВУОСНОЕ ТРЕХШАРНИРНОЕ СОЕДИНЕНИЕ
Система состоит из трех звеньев: А, В и
ТРЕХОСНОЕ ЧЕТЫРЕХШАРНИРНОЕ СОЕДИНЕНИЕ
L
N’
Трехосное соединение осуществляет вращение вокруг 3-х взаимно- перпендикулярных
ТРЕХОСНОЕ ЧЕТЫРЕХШАРНИРНОЕ СОЕДИНЕНИЕ
L
N’
Трехосное соединение осуществляет вращение вокруг 3-х взаимно- перпендикулярных
Рычаг- твердое тело, имеющее неподвижную ось вращения, на которое действуют силы,
Рычаг- твердое тело, имеющее неподвижную ось вращения, на которое действуют силы,
ВИДЫ РЫЧАГОВ
Рычаг I рода
Рычаг II рода
Рычаг силы
Рычаг скорости
ВИДЫ РЫЧАГОВ
Рычаг I рода
Рычаг II рода
Рычаг силы
Рычаг скорости
РЫЧАГ ПЕРВОГО РОД
Рычаг первого рода- это рычаг, ось вращения которого
РЫЧАГ ПЕРВОГО РОД
Рычаг первого рода- это рычаг, ось вращения которого
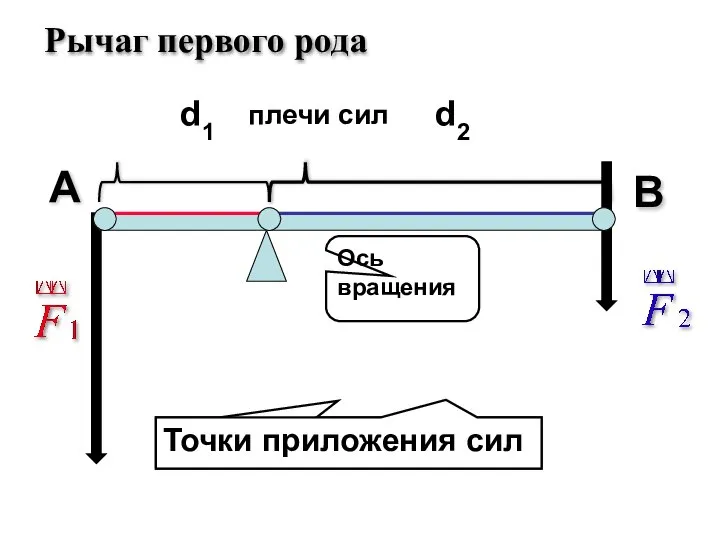
d1
d2
А
В
Ось вращения
плечи сил
Рычаг первого рода
d1
d2
А
В
Ось вращения
плечи сил
Рычаг первого рода
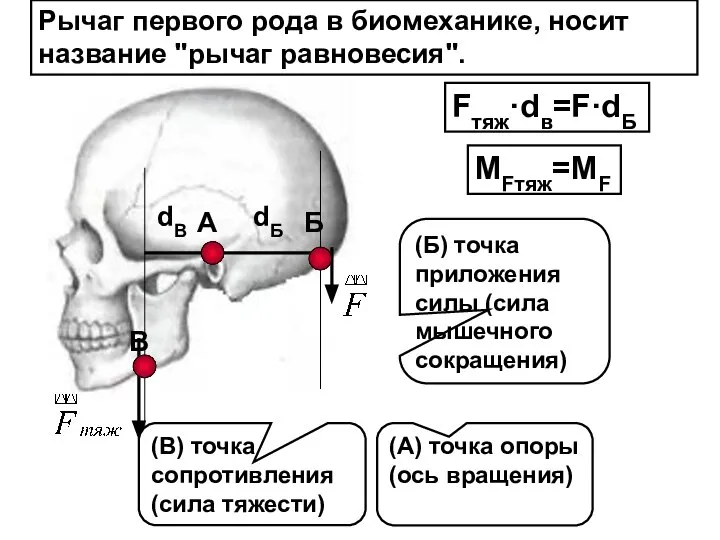
А
B
Б
dB
dБ
(А) точка опоры
(ось вращения)
(В) точка сопротивления (сила тяжести)
(Б) точка приложения силы
А
B
Б
dB
dБ
(А) точка опоры
(ось вращения)
(В) точка сопротивления (сила тяжести)
(Б) точка приложения силы
Рычаг второго рода
это рычаг, ось вращения которого расположена по одну сторону
Рычаг второго рода
это рычаг, ось вращения которого расположена по одну сторону
d1-плечо силы F1
В
d2- плечо силы F2
Рычаг второго рода
Ось вращения
А
d1-плечо силы F1
В
d2- плечо силы F2
Рычаг второго рода
Ось вращения
А
ТИПЫ РЫЧАГОВ II РОДА
Рычаг скорости, в котором происходит выигрыш в скорости
ТИПЫ РЫЧАГОВ II РОДА
Рычаг скорости, в котором происходит выигрыш в скорости
"рычаг скорости" - плечо приложения мышечной силы короче, чем плечо сопротивления,
"рычаг скорости" - плечо приложения мышечной силы короче, чем плечо сопротивления,

У второго вида одноплечего рычага - "рычага скорости" - плечо приложения
У второго вида одноплечего рычага - "рычага скорости" - плечо приложения
А
В
Б
dБ
dB
"рычаг силы" - плечо приложения мышечной силы длиннее плеча силы тяжести.
Точкой
А
В
Б
dБ
dB
"рычаг силы" - плечо приложения мышечной силы длиннее плеча силы тяжести.
Точкой
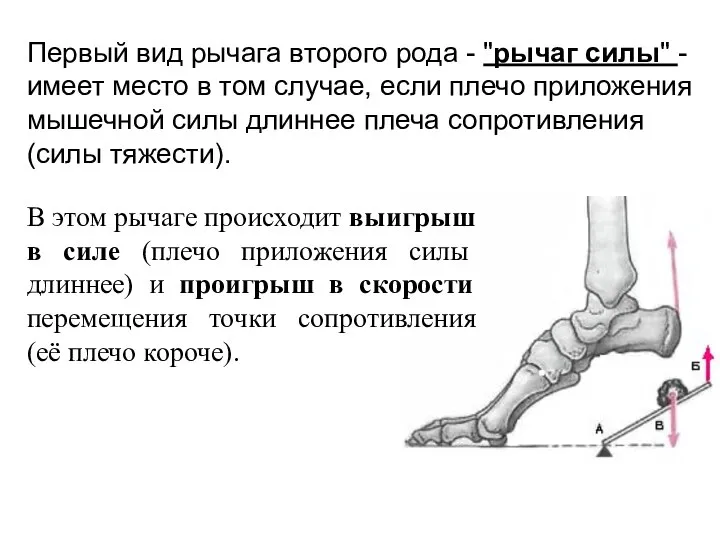
Первый вид рычага второго рода - "рычаг силы" - имеет место
Первый вид рычага второго рода - "рычаг силы" - имеет место
Работа и энергия.
Механической работой силы называется величина, равная произведению проекции
Работа и энергия.
Механической работой силы называется величина, равная произведению проекции
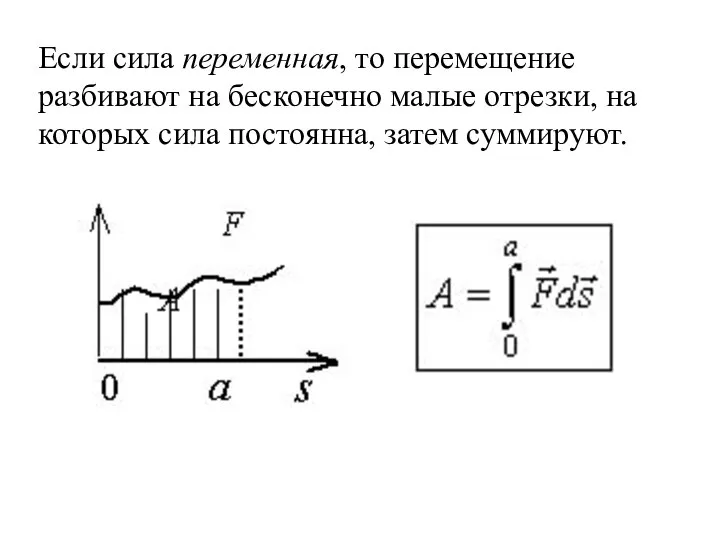
Если сила переменная, то перемещение разбивают на бесконечно малые отрезки, на
Если сила переменная, то перемещение разбивают на бесконечно малые отрезки, на
Эффективность совершения работы характеризуется мощностью.
Мощность - величина, равная отношению работы
Эффективность совершения работы характеризуется мощностью. Мощность - величина, равная отношению работы
Коэффициент полезного действия (КПД) равен отношению полезной работы, совершенной машиной, к
Коэффициент полезного действия (КПД) равен отношению полезной работы, совершенной машиной, к
Энергия –физическая величина, характеризующая способность системы совершить работу.
Виды энергии : механическая,
Энергия –физическая величина, характеризующая способность системы совершить работу. Виды энергии : механическая,
Изменение энергии системы при переходе из одного состояния в другое равно
Изменение энергии системы при переходе из одного состояния в другое равно
Механическая энергия изолированной системы равна сумме кинетической и потенциальной энергии
и
Механическая энергия изолированной системы равна сумме кинетической и потенциальной энергии и
 Величины, характеризующие колебательное движение.
Величины, характеризующие колебательное движение. Решение задач по теме «Давление твёрдого тела» Учитель физики Сорокина Ольга Адольфовна МКОУ В(С)ОШ при ФКУ ИК – 3
Решение задач по теме «Давление твёрдого тела» Учитель физики Сорокина Ольга Адольфовна МКОУ В(С)ОШ при ФКУ ИК – 3  Лабораторная работа №7. Измерение выталкивающей силы
Лабораторная работа №7. Измерение выталкивающей силы Простые механизмы. Рычаг. Равновесие сил на рычаге
Простые механизмы. Рычаг. Равновесие сил на рычаге Моделирование процессов термомодифицирования древесины
Моделирование процессов термомодифицирования древесины Магнит өрісінің. Дивергенция және Роторы
Магнит өрісінің. Дивергенция және Роторы Железоуглеродистые сплавы. Построение диаграммы fe-fe3с. Характеристика компонентов, фаз и структурных составляющих. (лекция 3)
Железоуглеродистые сплавы. Построение диаграммы fe-fe3с. Характеристика компонентов, фаз и структурных составляющих. (лекция 3) Всероссийская олимпиада школьников по физике. Разбор заданий муниципального этапа. 10 класс
Всероссийская олимпиада школьников по физике. Разбор заданий муниципального этапа. 10 класс Система сходящихся сил
Система сходящихся сил Инфракрасная спектроскопия
Инфракрасная спектроскопия Концепции пространства – времени
Концепции пространства – времени Май күпдеші озған өткізгіш материал және оның парамтрі
Май күпдеші озған өткізгіш материал және оның парамтрі Источники электропитания
Источники электропитания Теорема Остроградского-Гаусса
Теорема Остроградского-Гаусса Динамика линейных САУ
Динамика линейных САУ Исследовательский проект: «Радиация вокруг нас» Проблема: « Влияет ли на естественный радиационный фон г. Кувшиново - Калининская
Исследовательский проект: «Радиация вокруг нас» Проблема: « Влияет ли на естественный радиационный фон г. Кувшиново - Калининская  Влияние тепловых двигателей на окружающую среду
Влияние тепловых двигателей на окружающую среду FOURWINGS Дрон нового поколения
FOURWINGS Дрон нового поколения Изобретение радио А.С. Поповым
Изобретение радио А.С. Поповым Презентация по физике Резонансная частота
Презентация по физике Резонансная частота  Аттестационная работа. Технические инновации Уральского Федерального округа
Аттестационная работа. Технические инновации Уральского Федерального округа Электр зарядының сақталу заңы
Электр зарядының сақталу заңы חומרים אלקטרונים הרצאה מס' 6
חומרים אלקטרונים הרצאה מס' 6 Термокольцо, которое показывает важные параметры для информации о всех проблемах жизнедеятельности организма. Защита проекта
Термокольцо, которое показывает важные параметры для информации о всех проблемах жизнедеятельности организма. Защита проекта Электроэнергетика мира Урок географии в 10 классе Учитель географии МКОУ «Никольская СОШ» Солнцева Ирина Николаевна
Электроэнергетика мира Урок географии в 10 классе Учитель географии МКОУ «Никольская СОШ» Солнцева Ирина Николаевна  Устройство машинной иглы. Неполадки
Устройство машинной иглы. Неполадки Живой свет свечи
Живой свет свечи Презентация по физике "Обман зрения" - скачать бесплатно
Презентация по физике "Обман зрения" - скачать бесплатно