- Пара сил. (Лекция 3)

Содержание
- 2. 2.4. Пара сил. Определение. Система из 2 равных по величине и противоположных по направлению сил, действующих
- 3. Свойства: Проекция пары сил на любую координатную ось равна 0. Алгебраическим (векторным) моментом пары сил называется
- 4. Следствие. Любую совокупность пар сил можно заменить одной парой сил. Замечание. Пара сил задается не при
- 5. 3. Статика Статика изучает равновесие тел.
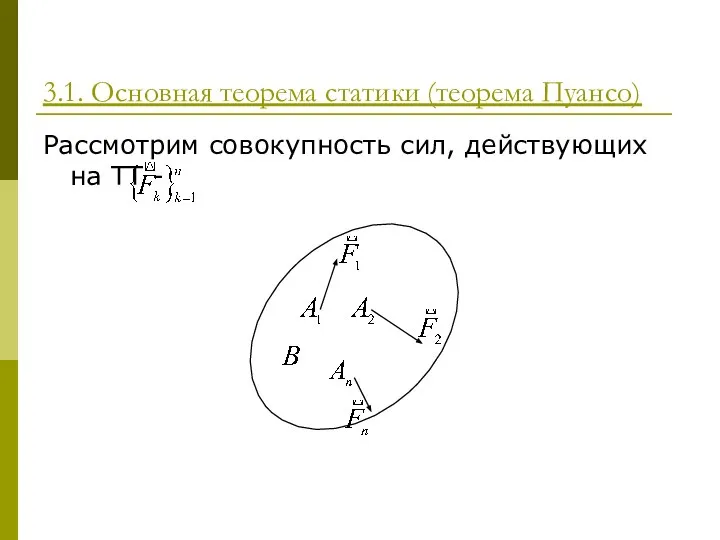
- 6. 3.1. Основная теорема статики (теорема Пуансо) Рассмотрим совокупность сил, действующих на ТТ -
- 7. Определение. Главным вектором системы сил называют вектор , который приложен в центре приведения. Определение. Главным моментом
- 8. Основная теорема статики. Любую систему сил, действующих на одно твердое тело, можно заменить на эквивалентную ей
- 9. 3.2. Условие равновесия системы сил (уравнения равновесия) Определение. Система сил находится в равновесии, если выполнено условие:
- 10. Плоская система сил:
- 11. 3.6. Внешние и внутренние силы. Определение. Сила взаимодействия между точками, входящими в одну механическую систему, называются
- 12. Свойства: 1. Главный вектор внутренних сил равен 0. 2. Главный момент внутренних сил равен 0.
- 13. 4. Динамика механических систем. 4.1. Основные теоремы динамики Теорема 1 (об изменении количества движения механической системы).
- 14. Определение. Количеством движения МТ называется вектор МТ, равный . Определение. Количеством движения МС называется свободный вектор,
- 15. Определение. Полным импульсом внешних сил называется выражение: . - интегральная форма записи Изменение количества движения механической
- 16. Законы сохранения: Если . Если . Если
- 17. Теорема 2 (о движении центра масс). Центр масс хоть и является геометрической точкой, но движется по
- 18. Определение. Центром масс называется геометрическая точка, радиус-вектор которой определяется согласно формуле:
- 19. Если движение задано в декартовой прямоугольной системе координат, то координаты центра масс определяются по формуле:
- 20. Замечание: хотя внутренние силы явно в формуле не участвуют, они вызывают изменение внешних сил, которые в
- 21. Теорема об изменении кинетического момента МС Скорость изменения кинетического момента механической системы относительно какой-либо точки равна
- 22. Рассмотрим случай, когда ТТ совершает вращательное движение относительно оси z:
- 23. Определение. Кинетическим моментом МТ относительно точки (оси) называют момент количества движения данной точки, вычисленный относительно точки
- 24. Определение. Моментом инерции механической системы относительно т. О называют величину, равную . Определение. Моментом инерции механической
- 25. Определение. Радиусом инерции механической системы относительно точки (осей) называют величины, равные и
- 27. Скачать презентацию
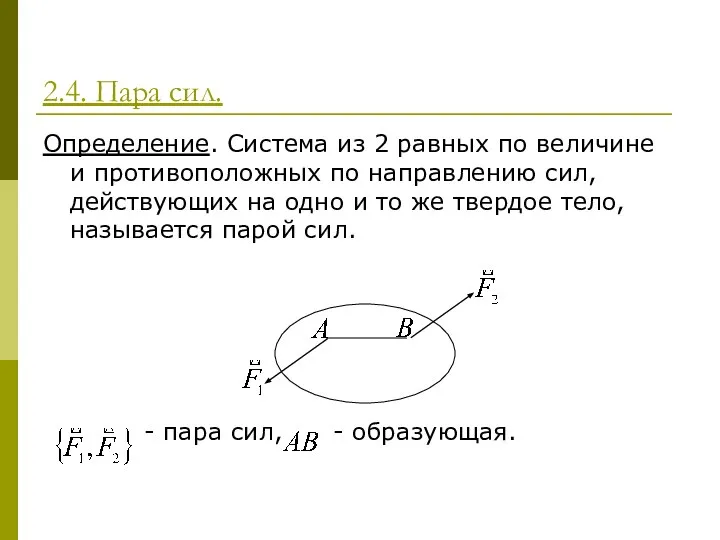
2.4. Пара сил.
Определение. Система из 2 равных по величине и противоположных
2.4. Пара сил.
Определение. Система из 2 равных по величине и противоположных
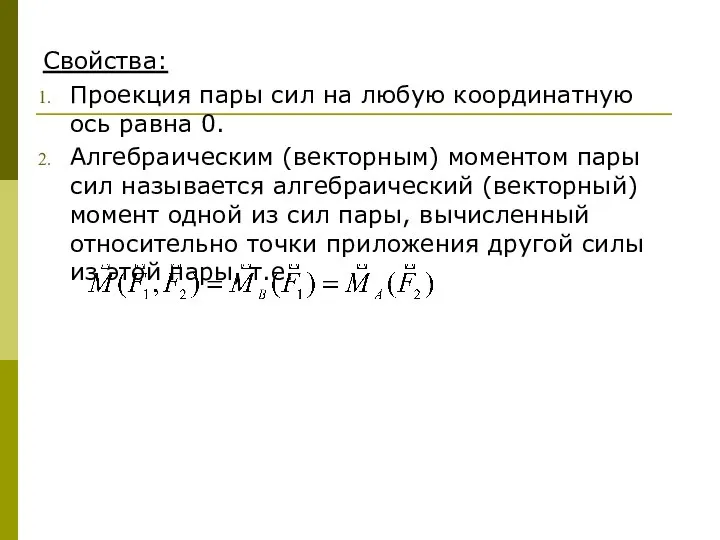
Свойства:
Проекция пары сил на любую координатную ось равна 0.
Алгебраическим (векторным) моментом
Свойства:
Проекция пары сил на любую координатную ось равна 0.
Алгебраическим (векторным) моментом
Следствие. Любую совокупность пар сил можно заменить одной парой сил.
Замечание. Пара
Следствие. Любую совокупность пар сил можно заменить одной парой сил.
Замечание. Пара
3. Статика
Статика изучает равновесие тел.
3. Статика
Статика изучает равновесие тел.
3.1. Основная теорема статики (теорема Пуансо)
Рассмотрим совокупность сил, действующих на ТТ
3.1. Основная теорема статики (теорема Пуансо)
Рассмотрим совокупность сил, действующих на ТТ
Определение. Главным вектором системы сил называют вектор , который приложен в
Основная теорема статики. Любую систему сил, действующих на одно твердое тело,
3.2. Условие равновесия системы сил (уравнения равновесия)
Определение. Система сил находится в
3.2. Условие равновесия системы сил (уравнения равновесия)
Определение. Система сил находится в
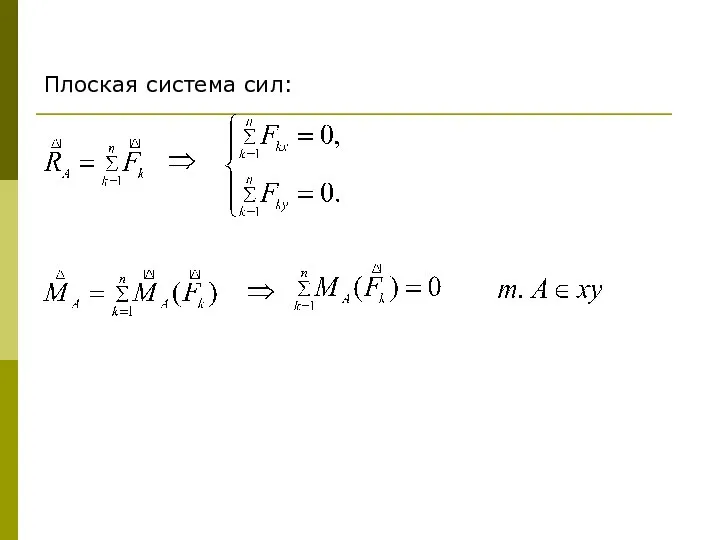
Плоская система сил:
3.6. Внешние и внутренние силы.
Определение. Сила взаимодействия между точками, входящими в
3.6. Внешние и внутренние силы.
Определение. Сила взаимодействия между точками, входящими в
Свойства:
1. Главный вектор внутренних сил равен 0.
2. Главный момент внутренних сил
1. Главный вектор внутренних сил равен 0.
2. Главный момент внутренних сил
4. Динамика механических систем.
4.1. Основные теоремы динамики
Теорема 1 (об изменении количества
4. Динамика механических систем.
4.1. Основные теоремы динамики
Теорема 1 (об изменении количества
Определение. Количеством движения МТ называется вектор МТ, равный .
Определение. Количеством движения
Определение. Количеством движения МТ называется вектор МТ, равный .
Определение. Количеством движения
Определение. Полным импульсом внешних сил
называется выражение: .
- интегральная форма
Определение. Полным импульсом внешних сил
называется выражение: .
- интегральная форма
Законы сохранения:
Если .
Если .
Если
Законы сохранения:
Если .
Если .
Если
Теорема 2 (о движении центра масс).
Центр масс хоть и является геометрической
Теорема 2 (о движении центра масс).
Центр масс хоть и является геометрической
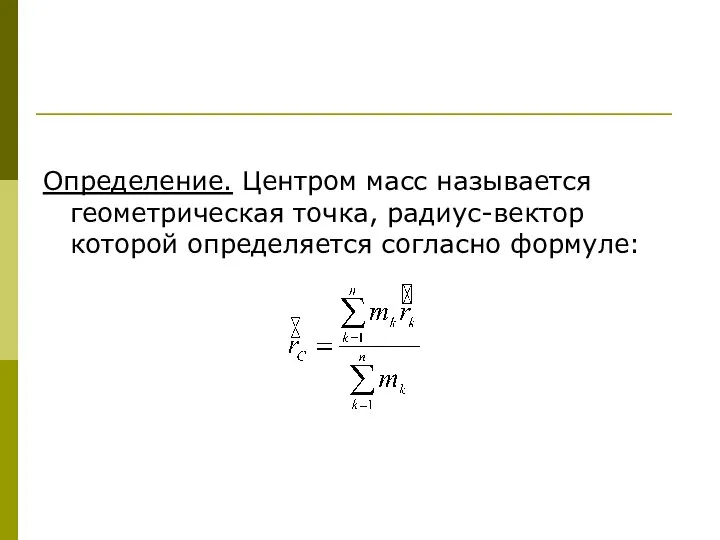
Определение. Центром масс называется геометрическая точка, радиус-вектор которой определяется согласно формуле:
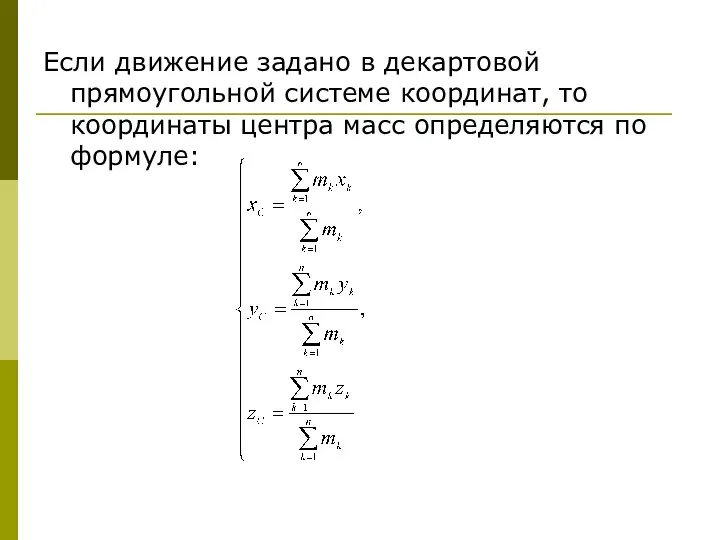
Если движение задано в декартовой прямоугольной системе координат, то координаты центра
Если движение задано в декартовой прямоугольной системе координат, то координаты центра

Замечание: хотя внутренние силы явно в формуле не участвуют, они вызывают
Замечание: хотя внутренние силы явно в формуле не участвуют, они вызывают
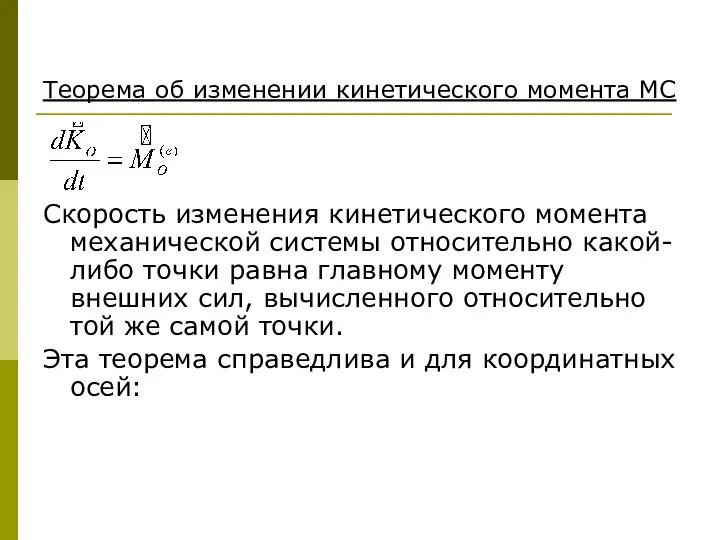
Теорема об изменении кинетического момента МС
Скорость изменения кинетического момента механической системы
Скорость изменения кинетического момента механической системы
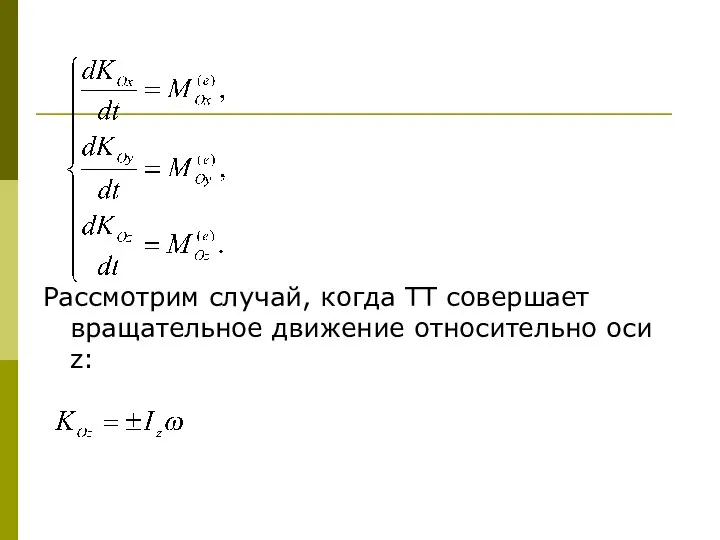
Рассмотрим случай, когда ТТ совершает вращательное движение относительно оси z:
Рассмотрим случай, когда ТТ совершает вращательное движение относительно оси z:
Определение. Кинетическим моментом МТ относительно точки (оси) называют момент количества движения
Определение. Кинетическим моментом МТ относительно точки (оси) называют момент количества движения
Определение. Моментом инерции механической системы относительно т. О называют величину, равную
Определение. Моментом инерции механической системы относительно т. О называют величину, равную
 Волновая теория света. Явления интерференции и дифракции (Лекция 20)
Волновая теория света. Явления интерференции и дифракции (Лекция 20) Необслуживаемые автомобильные аккумуляторы
Необслуживаемые автомобильные аккумуляторы Давление твердых тел, жидкостей и газов
Давление твердых тел, жидкостей и газов Аттестационная работа. Зависимость результатов сдачи государственного экзамена от участия школьников в олимпиадном движении
Аттестационная работа. Зависимость результатов сдачи государственного экзамена от участия школьников в олимпиадном движении Презентация Задачи на движение
Презентация Задачи на движение Инфракрасное излучение
Инфракрасное излучение  Решение задач на законы сохранения импульса и энергии
Решение задач на законы сохранения импульса и энергии Механические свойства твёрдых тел. Кристаллические и аморфные тела
Механические свойства твёрдых тел. Кристаллические и аморфные тела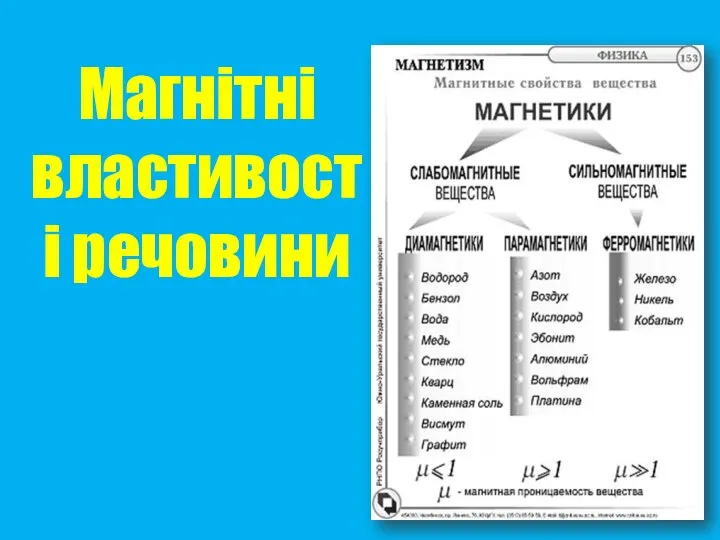 Магнітні властивості речовини
Магнітні властивості речовини  Elektriskās piedziņas pārejas procesi. (№4)
Elektriskās piedziņas pārejas procesi. (№4) Электроемкость. Единицы электроемкости. Конденсаторы
Электроемкость. Единицы электроемкости. Конденсаторы Протоколы квантового распределения ключей
Протоколы квантового распределения ключей Относительность движения. Классический закон сложения скоростей и перемещений
Относительность движения. Классический закон сложения скоростей и перемещений Механика. Виды движения
Механика. Виды движения Элементы теории упругости, тензоры деформаций и напряжений
Элементы теории упругости, тензоры деформаций и напряжений Элементы статистической физики. (Лекция 8)
Элементы статистической физики. (Лекция 8) Принцип неопределённости Гейзенберга 1927
Принцип неопределённости Гейзенберга 1927 Arduino. Электрическая схема
Arduino. Электрическая схема Классификация нелинейных элементов и цепей
Классификация нелинейных элементов и цепей Презентация по физике "Плотность вещества, масса и объем. Решение задач" - скачать
Презентация по физике "Плотность вещества, масса и объем. Решение задач" - скачать  Магнитомягкие материалы для устройств преобразующих электромагнитную энергию
Магнитомягкие материалы для устройств преобразующих электромагнитную энергию Атомные спектры
Атомные спектры Методы численного моделирования полупроводниковых приборов
Методы численного моделирования полупроводниковых приборов Ядерные реакции. Энергия связи атомного ядра
Ядерные реакции. Энергия связи атомного ядра Источники и потребители реактивной мощности
Источники и потребители реактивной мощности Где живёт электричество? Работу выполнили ученики 4 класса МОУ «
Где живёт электричество? Работу выполнили ученики 4 класса МОУ « Динамика. Инерциальные системы отсчета. Первый закон Ньютона
Динамика. Инерциальные системы отсчета. Первый закон Ньютона Задачи на смеси, сплавы и растворы
Задачи на смеси, сплавы и растворы