- PID controller Design

Содержание
- 2. “Good, better, best. Never let it rest. Til your good is better and your better is
- 3. Classical Controller- PID Controller
- 4. Introduction Design PID control Know mathematical model ? various design techniques Plant is complicated, can’t obtain
- 5. PID Control A closed loop (feedback) control system, generally with Single Input-Single Output (SISO) A portion
- 6. Output equation of PID controller in time domain
- 7. The Characteristics of P, I, and D controllers
- 8. Figure 4.11 Process reaction curve PID Controller- Ziegler Method #1
- 9. Figure 4.11 Process reaction curves (R.C.Dorf et.al and Others) PID Controller- Ziegler Method #1
- 10. Figure 4.12 Quarter decay ratio PID Controller- Ziegler Method #1
- 11. PID Controller- Ziegler Method #1
- 12. Figure 4.13 Determination of ultimate gain and period PID Controller- Ziegler Method #2
- 13. Figure 4.14 Neutrally stable system PID Controller- Ziegler Method #2
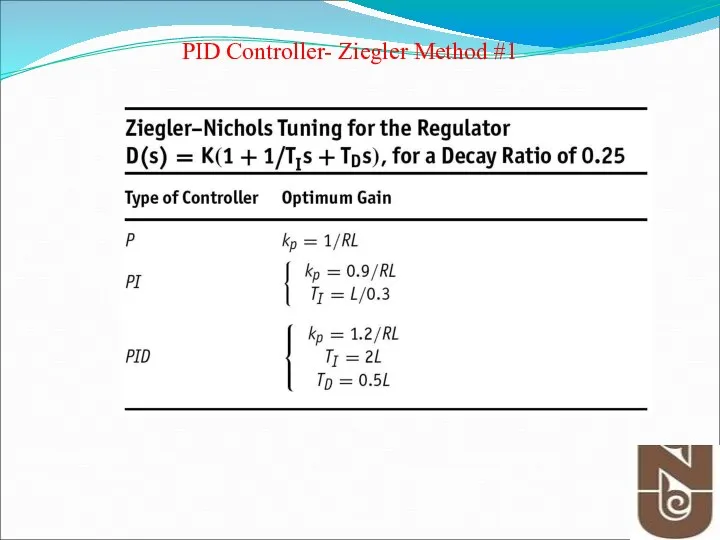
- 14. Ti - the controller's integrator time constant Td - the controller's derivative time constant PID Controller-
- 15. Example: Method # 1 Figure 4.15 A measured process reaction curve
- 16. Example: Method # 2 Figure 4.17 Ultimate period of heat exchanger
- 17. Exercise # 1-PID Controller
- 20. Practice-Exercise
- 22. Скачать презентацию
“Good, better, best. Never let it rest. Til your good is
“Good, better, best. Never let it rest. Til your good is
Classical Controller-
PID Controller
Classical Controller-
PID Controller
Introduction
Design PID control
Know mathematical model ? various design techniques
Plant is complicated,
Introduction
Design PID control
Know mathematical model ? various design techniques
Plant is complicated,
PID Control
A closed loop (feedback) control system, generally with Single Input-Single
PID Control
A closed loop (feedback) control system, generally with Single Input-Single
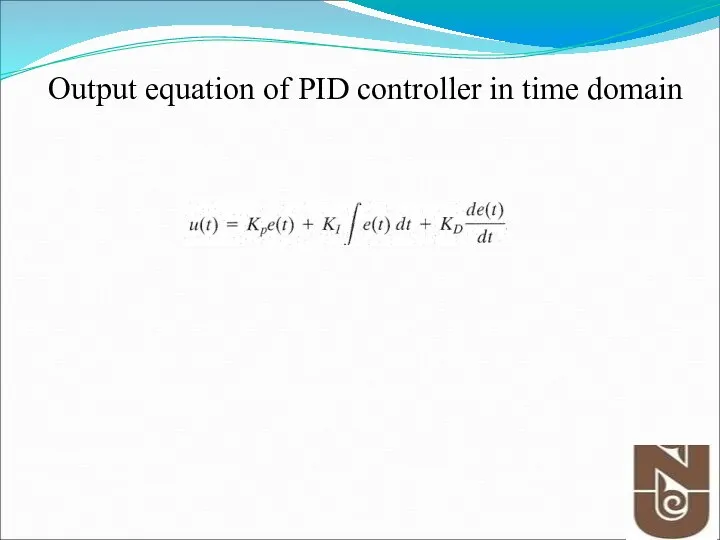
Output equation of PID controller in time domain
Output equation of PID controller in time domain
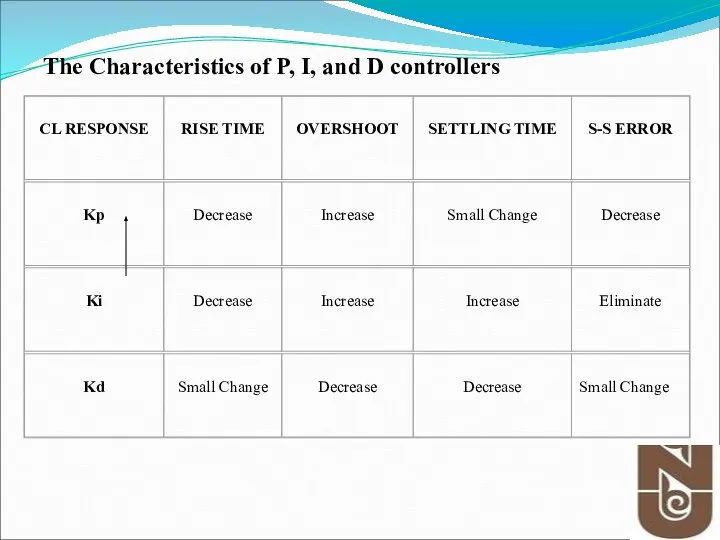
The Characteristics of P, I, and D controllers
The Characteristics of P, I, and D controllers
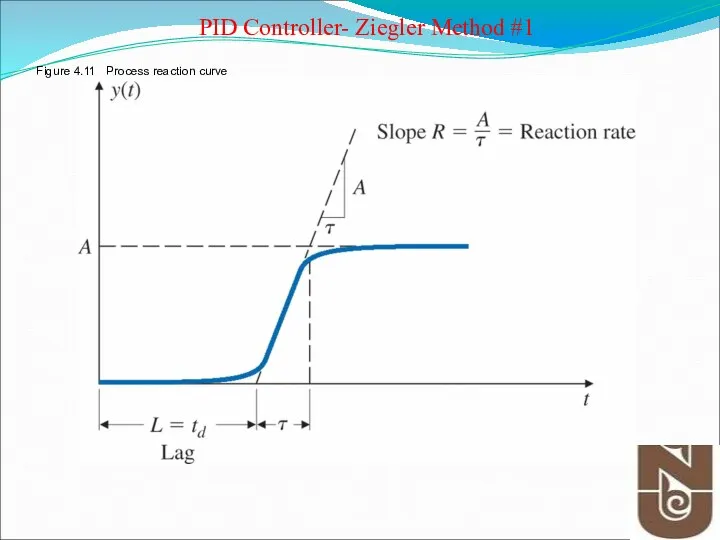
Figure 4.11 Process reaction curve
PID Controller- Ziegler Method #1
Figure 4.11 Process reaction curve
PID Controller- Ziegler Method #1
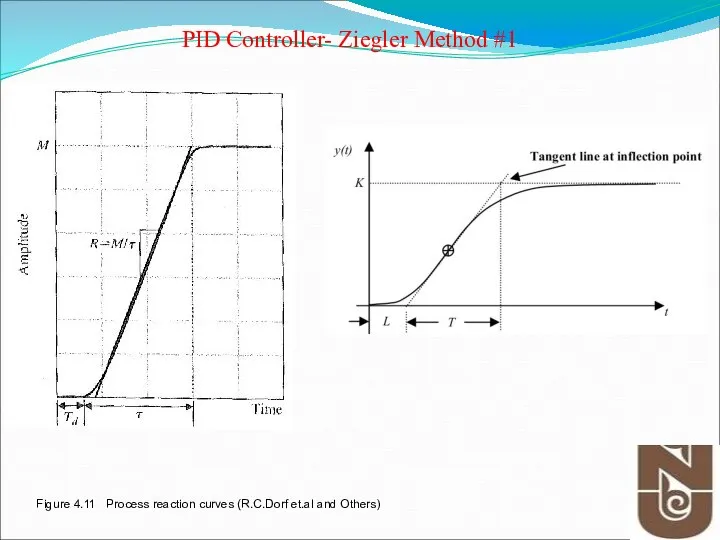
Figure 4.11 Process reaction curves (R.C.Dorf et.al and Others)
PID Controller- Ziegler
Figure 4.11 Process reaction curves (R.C.Dorf et.al and Others)
PID Controller- Ziegler
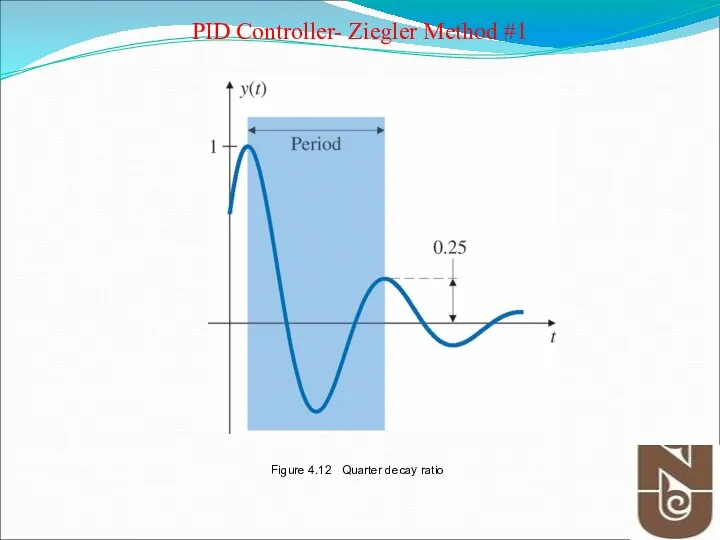
Figure 4.12 Quarter decay ratio
PID Controller- Ziegler Method #1
Figure 4.12 Quarter decay ratio
PID Controller- Ziegler Method #1
PID Controller- Ziegler Method #1
PID Controller- Ziegler Method #1
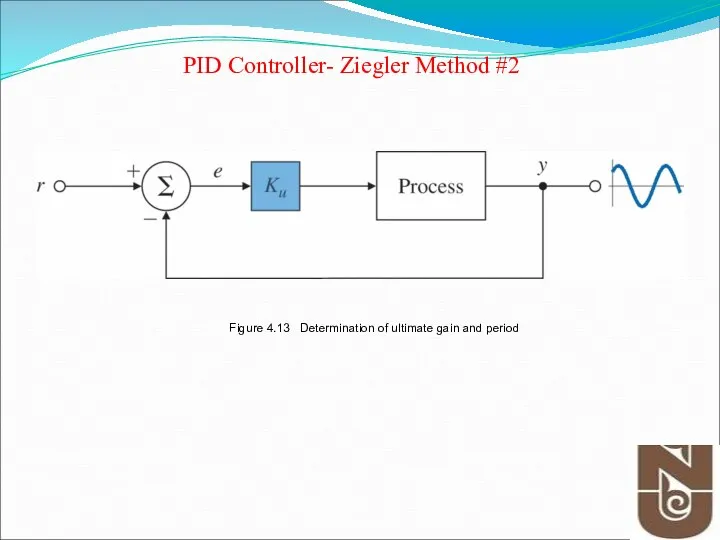
Figure 4.13 Determination of ultimate gain and period
PID Controller- Ziegler Method
Figure 4.13 Determination of ultimate gain and period
PID Controller- Ziegler Method
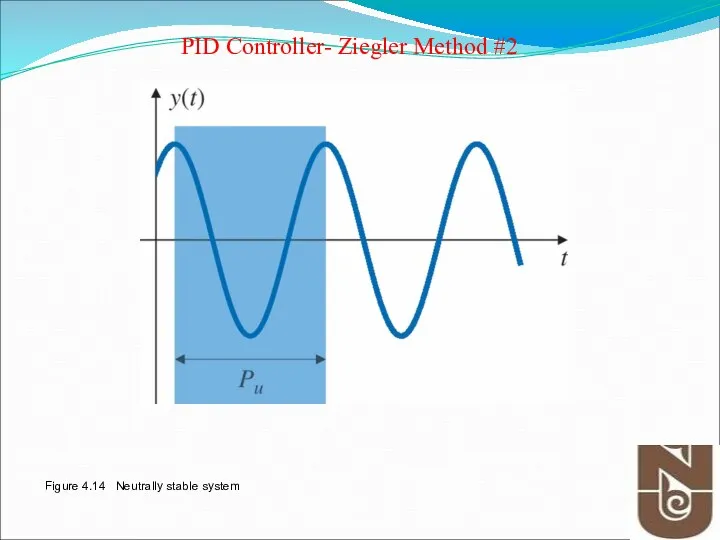
Figure 4.14 Neutrally stable system
PID Controller- Ziegler Method #2
Figure 4.14 Neutrally stable system
PID Controller- Ziegler Method #2

Ti - the controller's integrator time constant
Td - the controller's derivative time constant
PID
Ti - the controller's integrator time constant
Td - the controller's derivative time constant
PID
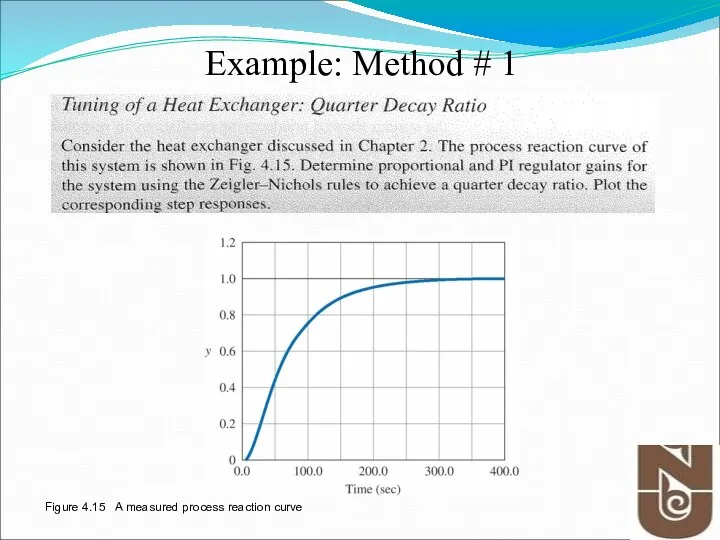
Example: Method # 1
Figure 4.15 A measured process reaction curve
Example: Method # 1
Figure 4.15 A measured process reaction curve

Example: Method # 2
Figure 4.17 Ultimate period of heat exchanger
Example: Method # 2
Figure 4.17 Ultimate period of heat exchanger
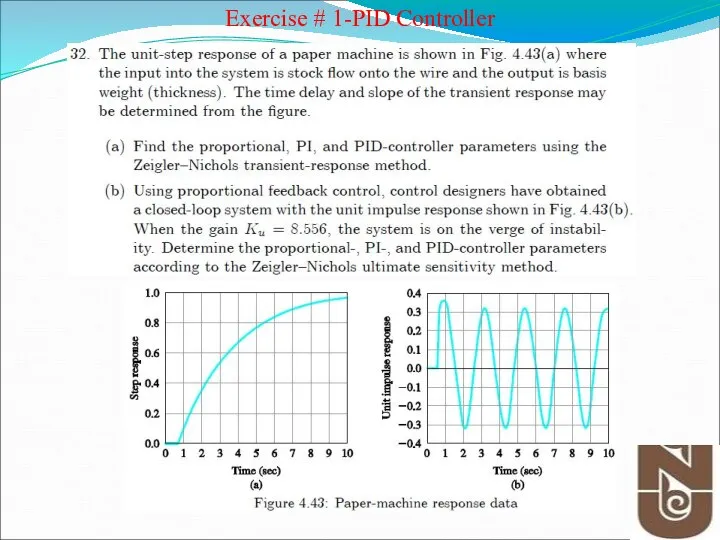
Exercise # 1-PID Controller
Exercise # 1-PID Controller


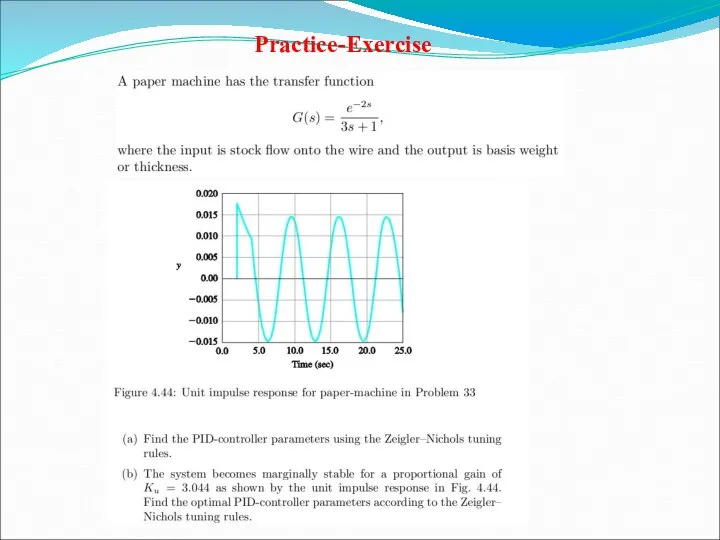
Practice-Exercise
Practice-Exercise
 Гармонические колебания. Свободные колебания. Вынужденные колебания
Гармонические колебания. Свободные колебания. Вынужденные колебания Математическое моделирование подавления волны горения при различных внешних воздействиях
Математическое моделирование подавления волны горения при различных внешних воздействиях Свет и его источники
Свет и его источники Динаміка твердого тіла
Динаміка твердого тіла Конструкция авотмобиля
Конструкция авотмобиля Сложный теплообмен
Сложный теплообмен Тепловые двигатели. Термодинамические циклы. Холодильная машина
Тепловые двигатели. Термодинамические циклы. Холодильная машина Энтропия. Термодинамическая энтропия
Энтропия. Термодинамическая энтропия Закон сохранения и превращения энергии в механических и тепловых процессах
Закон сохранения и превращения энергии в механических и тепловых процессах Проблема устойчивости атмосферы планет
Проблема устойчивости атмосферы планет Квазиклассическая теория динамики электрона. Кинетическая теория Больцмана
Квазиклассическая теория динамики электрона. Кинетическая теория Больцмана Исследовательский проект: «Радиация вокруг нас» Проблема: « Влияет ли на естественный радиационный фон г. Кувшиново - Калининская
Исследовательский проект: «Радиация вокруг нас» Проблема: « Влияет ли на естественный радиационный фон г. Кувшиново - Калининская  Презентация по физике "Ф.А Бредихин" - скачать бесплатно
Презентация по физике "Ф.А Бредихин" - скачать бесплатно Водяной пар в атмосфере
Водяной пар в атмосфере Презентация по физике "Основные положения МКТ" - скачать
Презентация по физике "Основные положения МКТ" - скачать  Урок физики в 10 классе Сила трения
Урок физики в 10 классе Сила трения  Подготовка газоспасателей к выполнению оперативного задания и ведение разведки. Расчёт параметров СИЗОД 1
Подготовка газоспасателей к выполнению оперативного задания и ведение разведки. Расчёт параметров СИЗОД 1 Методы зондирования окружающей среды. Радиофизические характеристики атмосферы Земли
Методы зондирования окружающей среды. Радиофизические характеристики атмосферы Земли Внутренняя энергия. Первый закон термодинамики. Применение первого закона термодинамики к изопроцессам
Внутренняя энергия. Первый закон термодинамики. Применение первого закона термодинамики к изопроцессам «Коливання та хвилі» Виконала: Коновалова Марина 11-А
«Коливання та хвилі» Виконала: Коновалова Марина 11-А  Ядерная энергия: её сущность и использование в технике и технологиях
Ядерная энергия: её сущность и использование в технике и технологиях Презентация по физике "Магнетизм" - скачать
Презентация по физике "Магнетизм" - скачать  Шайбы и гаечные замки
Шайбы и гаечные замки Давление в жидкостях и газах
Давление в жидкостях и газах  Радиоволны в нашей жизни Презентацию выполнили ученики 11 В класса МОУ Лицей №5 им. Ю. А. Гагарина: Мишустин Олег Алексеевич Радчен
Радиоволны в нашей жизни Презентацию выполнили ученики 11 В класса МОУ Лицей №5 им. Ю. А. Гагарина: Мишустин Олег Алексеевич Радчен Свет как поток фотонов
Свет как поток фотонов  Химия-технологиялық процестерді модельдеу. Ұқсастық теориясының негіздері
Химия-технологиялық процестерді модельдеу. Ұқсастық теориясының негіздері Термодинамика химических процессов
Термодинамика химических процессов