- Плоская произвольная система сил

Содержание
- 2. не изменяя оказываемого на тело действия, силу, приложенную к телу, можно перенести параллельно ей самой в
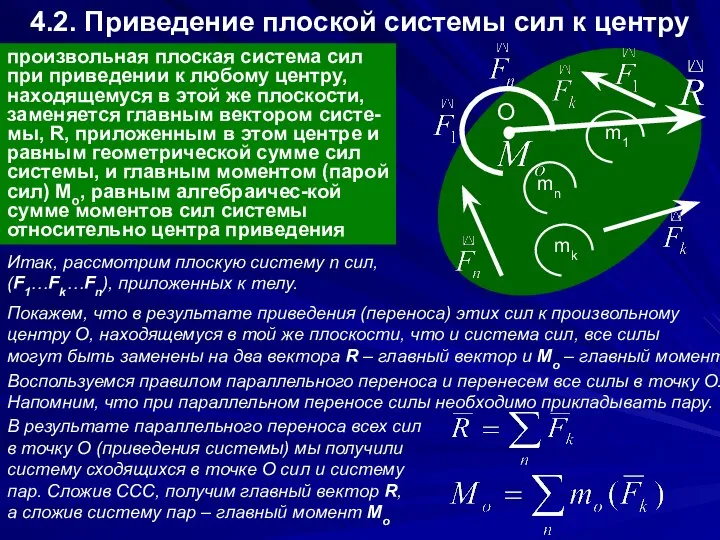
- 3. 4.2. Приведение плоской системы сил к центру произвольная плоская система сил при приведении к любому центру,
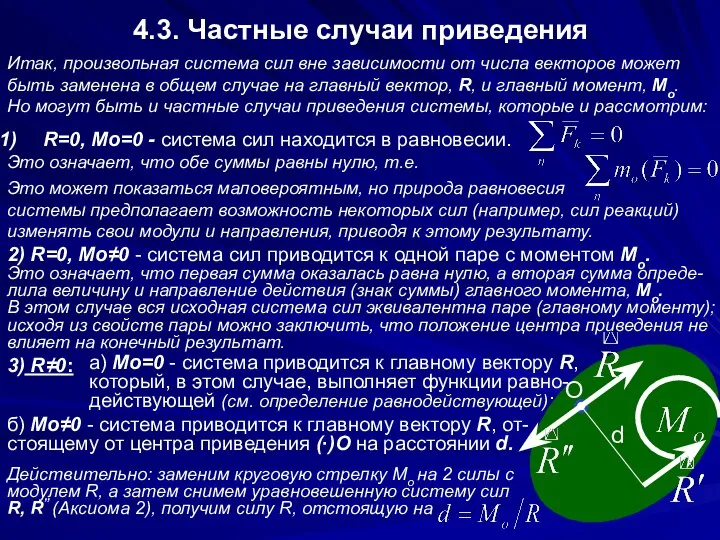
- 4. 4.3. Частные случаи приведения R=0, Mо=0 - система сил находится в равновесии. Это означает, что обе
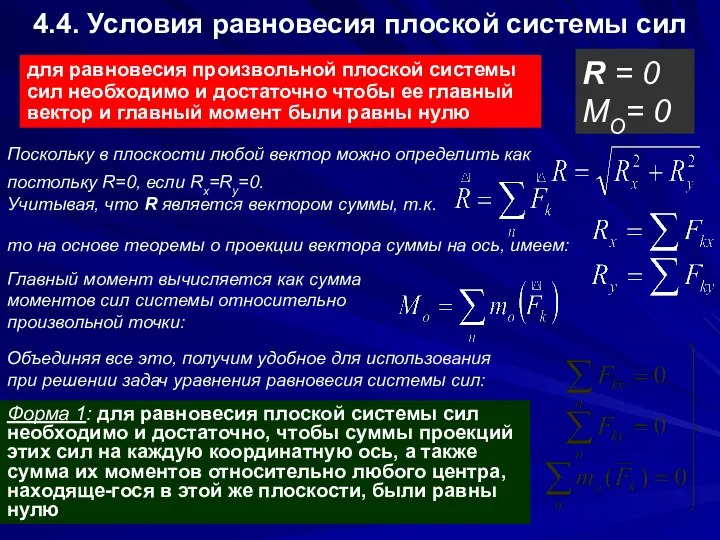
- 5. 4.4. Условия равновесия плоской системы сил для равновесия произвольной плоской системы сил необходимо и достаточно чтобы
- 6. Форма 2: для равновесия плоской системы сил необходимо и достаточно, чтобы суммы их моментов относительно двух
- 8. Скачать презентацию
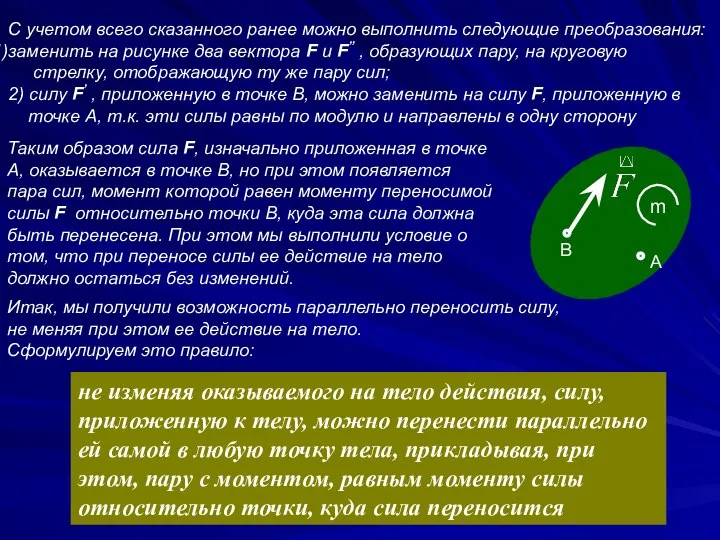
не изменяя оказываемого на тело действия, силу, приложенную к телу, можно
не изменяя оказываемого на тело действия, силу, приложенную к телу, можно
4.2. Приведение плоской системы сил к центру
произвольная плоская система сил при
4.2. Приведение плоской системы сил к центру
произвольная плоская система сил при
4.3. Частные случаи приведения
R=0, Mо=0 - система сил находится в равновесии.
Это
4.3. Частные случаи приведения
R=0, Mо=0 - система сил находится в равновесии.
Это
4.4. Условия равновесия плоской системы сил
для равновесия произвольной плоской системы сил
4.4. Условия равновесия плоской системы сил
для равновесия произвольной плоской системы сил
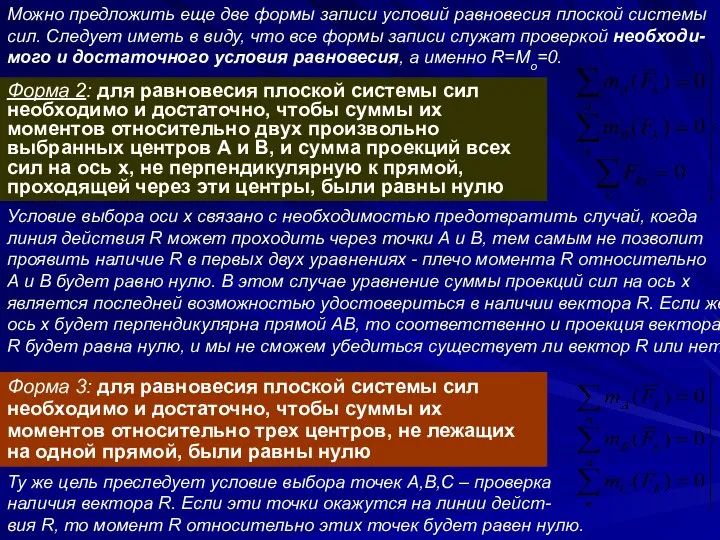
Форма 2: для равновесия плоской системы сил необходимо и достаточно, чтобы
Форма 2: для равновесия плоской системы сил необходимо и достаточно, чтобы
 Давление твердых тел, жидкостей и газов. Сообщающиеся сосуды
Давление твердых тел, жидкостей и газов. Сообщающиеся сосуды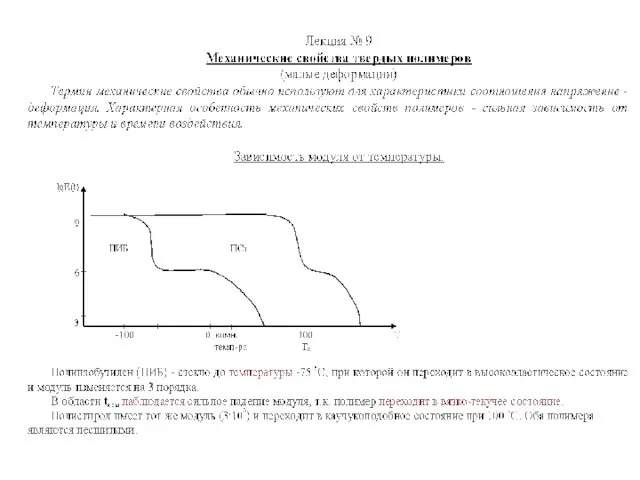 Механические свойства твердых полимеров, малые деформации. (Лекция 9)
Механические свойства твердых полимеров, малые деформации. (Лекция 9) Физика пәнінің электро-монтер мамандығында алатын орны
Физика пәнінің электро-монтер мамандығында алатын орны Магнітне поле постійного струму
Магнітне поле постійного струму Дисперсия света
Дисперсия света  Постоянный ток
Постоянный ток Сила скрученной резины. (2 класс)
Сила скрученной резины. (2 класс) Аттестационная работа. Уроки - исследования по физике «Выталкивающая сила. Закон Архимеда»
Аттестационная работа. Уроки - исследования по физике «Выталкивающая сила. Закон Архимеда» Магнитное поле. Тема 7
Магнитное поле. Тема 7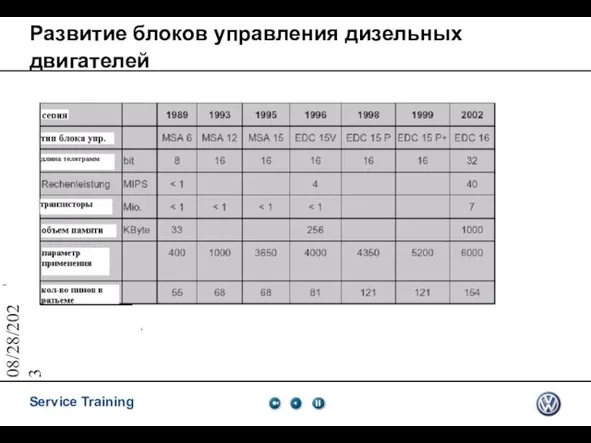 Развитие блоков управления дизельных двигателей
Развитие блоков управления дизельных двигателей ИК-спектроскопия
ИК-спектроскопия Физика ядерных реакторов
Физика ядерных реакторов Закон преломления
Закон преломления Элементарные частицы
Элементарные частицы Структура и содержание КИМ ЕГЭ по физике в 2018 году. Особенности оценивания заданий с развернутым ответом в ЕГЭ по физике
Структура и содержание КИМ ЕГЭ по физике в 2018 году. Особенности оценивания заданий с развернутым ответом в ЕГЭ по физике Механика жидкостей
Механика жидкостей Пластическая деформация монокристаллов
Пластическая деформация монокристаллов Изучение колебаний маятника Обербека
Изучение колебаний маятника Обербека Оптическое явление атмосферы гало
Оптическое явление атмосферы гало Что такое электродинамика
Что такое электродинамика Квантовая радиофизика. Лекция 4. Спектроскопия ЯМР
Квантовая радиофизика. Лекция 4. Спектроскопия ЯМР Виштовхувальна сила в рідинах і газах. Закон Архімеда
Виштовхувальна сила в рідинах і газах. Закон Архімеда Акустооптические модуляторы света
Акустооптические модуляторы света Источники электропитания для светодиодов от ММП-Ирбис
Источники электропитания для светодиодов от ММП-Ирбис Электростатическое поле в вакууме
Электростатическое поле в вакууме Ультразвук. Свойства ультразвука и области его применения
Ультразвук. Свойства ультразвука и области его применения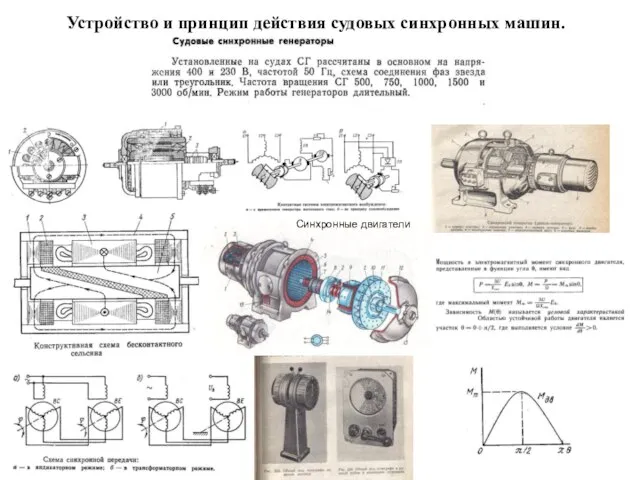 Устройство и принцип действия судовых синхронных машин. Синхронные двигатели. (Билет 14)
Устройство и принцип действия судовых синхронных машин. Синхронные двигатели. (Билет 14) Типы твердых тел. Зонная картина
Типы твердых тел. Зонная картина