- Плоская система сил

Содержание
- 2. 6.1. ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ. С учётом того, что вектор R для плоской
- 3. 6.1. ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ. Рассмотрим плоскую систему сил, которая не находится в
- 4. 6.1. ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ. 2. Если для данной системы сил R ≠
- 5. 6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ. Необходимые и достаточные условия равновесия любой системы сил
- 6. 6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ. 1. Первая (основная) форма условий равновесия. Для равновесия
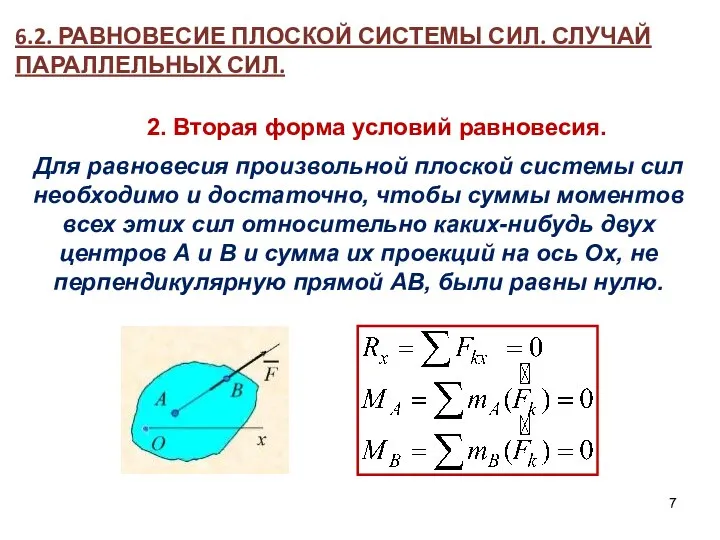
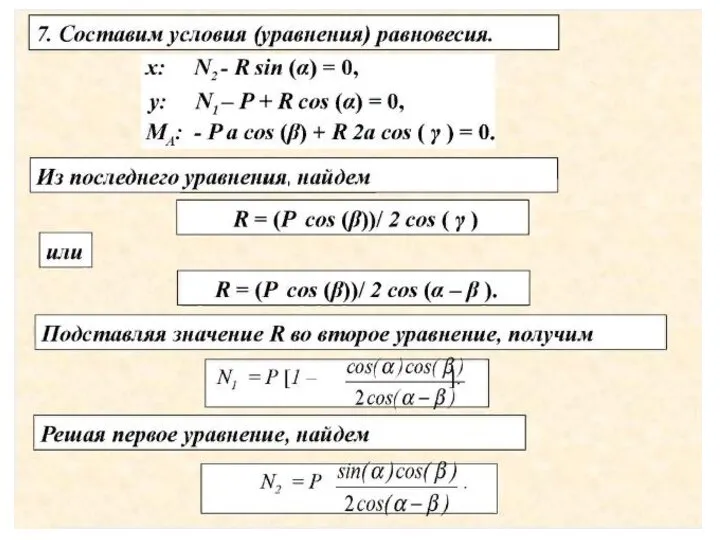
- 7. 6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ. 2. Вторая форма условий равновесия. Для равновесия произвольной
- 8. 6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ. 3. Третья форма условий равновесия. (уравнения трёх моментов)
- 9. 6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ. 4. Равновесие плоской системы параллельных сил В случае,
- 10. 6.3. РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ. Для получения более простых уравнений следует (если
- 11. 6.3. РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ. Чаще всего на практике встречаются задачи, где
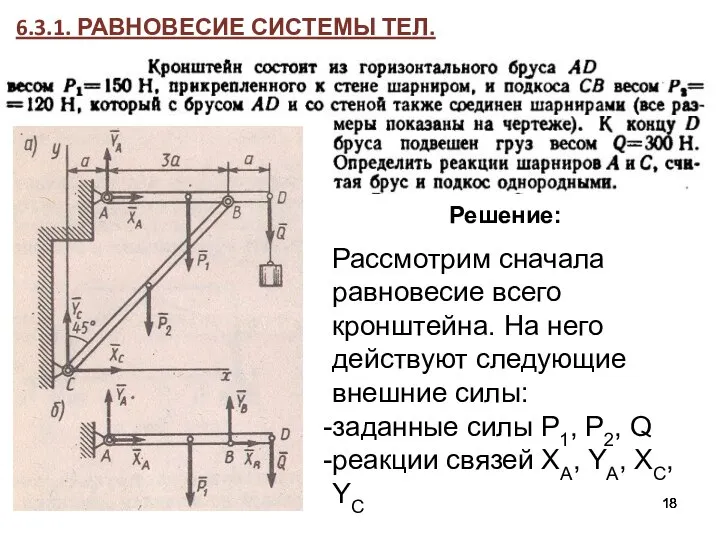
- 18. Решение: Рассмотрим сначала равновесие всего кронштейна. На него действуют следующие внешние силы: заданные силы Р1, P2,
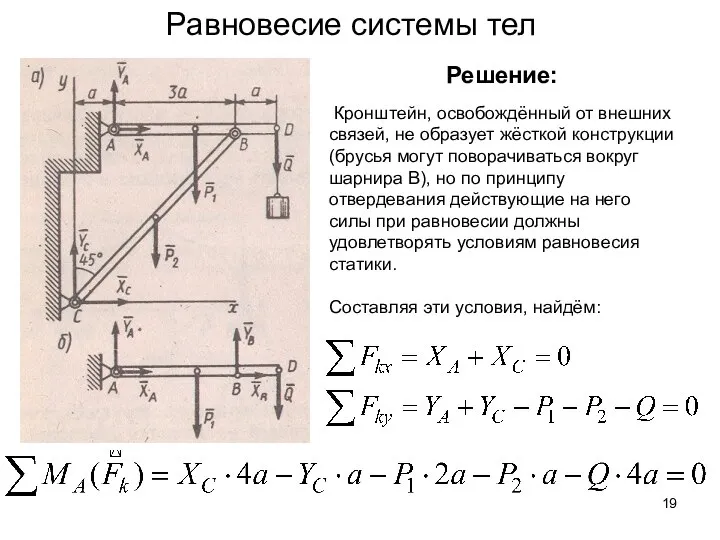
- 19. Решение: Кронштейн, освобождённый от внешних связей, не образует жёсткой конструкции (брусья могут поворачиваться вокруг шарнира В),
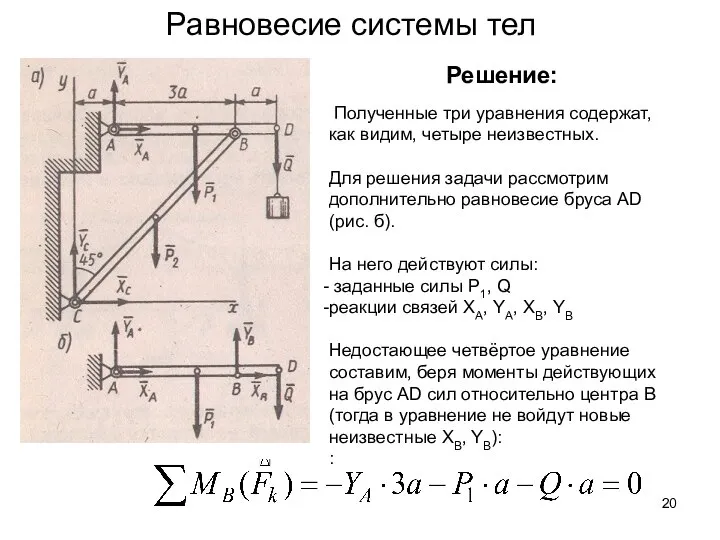
- 20. Равновесие системы тел Решение: Полученные три уравнения содержат, как видим, четыре неизвестных. Для решения задачи рассмотрим
- 21. Равновесие системы тел Решение: Решая теперь систему четырёх составленных уравнений (начиная с последнего), найдём: При решении
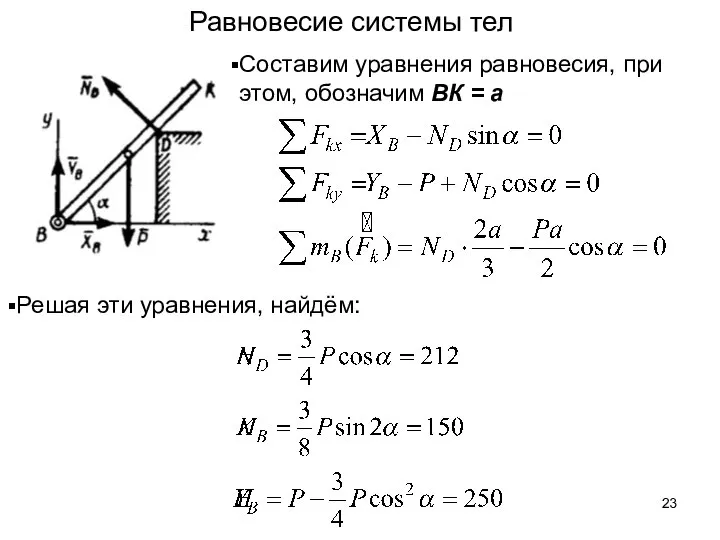
- 22. Решение: Расчленяя систему на две части, рассматриваем равновесие бруса ВК и балки АВ в отдельности. На
- 23. Равновесие системы тел Составим уравнения равновесия, при этом, обозначим ВК = а Решая эти уравнения, найдём:
- 24. Равновесие системы тел На балку АВ действуют следующие внешние силы: заданные силы Q реакции связей ХA,YA,
- 26. Скачать презентацию
6.1. ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ.
С учётом того, что
6.1. ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ.
С учётом того, что

6.1. ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ.
Рассмотрим плоскую систему сил,
6.1. ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ.
Рассмотрим плоскую систему сил,
6.1. ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ.
2. Если для данной
6.1. ПРИВЕДЕНИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ К ПРОСТЕЙШЕМУ ВИДУ.
2. Если для данной

6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ.
Необходимые и достаточные условия
6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ.
Необходимые и достаточные условия

6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ.
1. Первая (основная) форма
6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ.
1. Первая (основная) форма
6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ.
2. Вторая форма условий
6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ.
2. Вторая форма условий

6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ.
3. Третья форма условий
6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ.
3. Третья форма условий

6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ.
4. Равновесие плоской системы
6.2. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СИЛ. СЛУЧАЙ ПАРАЛЛЕЛЬНЫХ СИЛ.
4. Равновесие плоской системы

6.3. РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ.
Для получения более
6.3. РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ.
Для получения более
6.3. РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ.
Чаще всего на
6.3. РЕШЕНИЕ ЗАДАЧ НА РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ.
Чаще всего на





Решение:
Рассмотрим сначала равновесие всего кронштейна. На него действуют следующие внешние силы:
Решение:
Рассмотрим сначала равновесие всего кронштейна. На него действуют следующие внешние силы:
Решение:
Кронштейн, освобождённый от внешних связей, не образует жёсткой конструкции (брусья
Решение:
Кронштейн, освобождённый от внешних связей, не образует жёсткой конструкции (брусья
Равновесие системы тел
Решение:
Полученные три уравнения содержат, как видим, четыре неизвестных.
Равновесие системы тел
Решение:
Полученные три уравнения содержат, как видим, четыре неизвестных.

Равновесие системы тел
Решение:
Решая теперь систему четырёх составленных уравнений (начиная с
Равновесие системы тел
Решение:
Решая теперь систему четырёх составленных уравнений (начиная с

Решение:
Расчленяя систему на две части, рассматриваем равновесие бруса ВК и балки
Решение:
Расчленяя систему на две части, рассматриваем равновесие бруса ВК и балки
Равновесие системы тел
Составим уравнения равновесия, при этом, обозначим ВК = а
Решая
Равновесие системы тел
Составим уравнения равновесия, при этом, обозначим ВК = а
Решая

Равновесие системы тел
На балку АВ действуют следующие внешние силы:
заданные силы
Равновесие системы тел
На балку АВ действуют следующие внешние силы:
заданные силы
 История физики в вопросах и задачах
История физики в вопросах и задачах Engineering Mechanics Part II: Dynamics. Lectures 4 - 6
Engineering Mechanics Part II: Dynamics. Lectures 4 - 6 Фотовольтаика. Место фотовольтаики среди других дисциплин
Фотовольтаика. Место фотовольтаики среди других дисциплин Термоядерная реакция
Термоядерная реакция Сообщающиеся сосуды (7 класс)
Сообщающиеся сосуды (7 класс) Презентация по физике "Интерференция" - скачать
Презентация по физике "Интерференция" - скачать  Основы радиосвязи
Основы радиосвязи Дифракция света – явление огибания световыми волнами препятствий. В результате дифракции световые лучи отклоняются от прямол
Дифракция света – явление огибания световыми волнами препятствий. В результате дифракции световые лучи отклоняются от прямол Электромагнитные явления
Электромагнитные явления ЦВЕТ ПРОЗРАЧНЫХ И НЕПРОЗРАЧНЫХ ТЕЛ Журкин Алексей Хайбулаев Султан
ЦВЕТ ПРОЗРАЧНЫХ И НЕПРОЗРАЧНЫХ ТЕЛ Журкин Алексей Хайбулаев Султан Шероховатость поверхности и ее влияние на работу деталей
Шероховатость поверхности и ее влияние на работу деталей Энергия движущейся воды и ветра
Энергия движущейся воды и ветра Презентация Электризация тел при соприкосновении. Взаимодействие заряженных тел. Два рода зарядов 8 класс
Презентация Электризация тел при соприкосновении. Взаимодействие заряженных тел. Два рода зарядов 8 класс  Тема урока: «Внутренняя энергия. Способы изменения внутренней энергии»
Тема урока: «Внутренняя энергия. Способы изменения внутренней энергии» Магнитное поле в вакууме. Индукция магнитного поля. Закон Био-Савара-Лапласа
Магнитное поле в вакууме. Индукция магнитного поля. Закон Био-Савара-Лапласа Открытия ХХ века. Шариковая ручка
Открытия ХХ века. Шариковая ручка Форма критичної ізотерми рідин
Форма критичної ізотерми рідин Аттестационная работа. Программа элективного курса по физике «Мир удивительной оптики». (9 класс)
Аттестационная работа. Программа элективного курса по физике «Мир удивительной оптики». (9 класс) Термодинамиканың 2-заңы
Термодинамиканың 2-заңы Механические волны. Звуковая волна
Механические волны. Звуковая волна ATOMCON-2008 26.06.2008 Стратегия развития атомной энергетики России до 2050 года Рачков В.И., Директор Департамента научной политики Го
ATOMCON-2008 26.06.2008 Стратегия развития атомной энергетики России до 2050 года Рачков В.И., Директор Департамента научной политики Го Удельная теплота плавления
Удельная теплота плавления Тепловые двигатели и нагнетатели. Многоступенчатый компрессор
Тепловые двигатели и нагнетатели. Многоступенчатый компрессор Physical Output
Physical Output Судовые кислотные аккумуляторы
Судовые кислотные аккумуляторы Конденсаторы
Конденсаторы Карданные передачи. Назначение, конструкции
Карданные передачи. Назначение, конструкции Механическая работа
Механическая работа