- Плоскопараллельное движение твердого тела (плоское) = поступательное + вращательное

Содержание
- 2. Частный случай сложного движения ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА (ПЛОСКОЕ) = поступательное + вращательное Плоскопараллельным (плоским) движением
- 3. Общий случай плоскопараллельного движения О
- 5. В теории плоское движение рассматривают как мгновенно вращательное произвольной точки (т.е. точки параметры которой неизвестны) вокруг
- 6. Вращательное движение
- 7. Скорость произвольной точки плоской фигуры равна геометрической сумме скорости полюса и вращательной скорости этой точки вокруг
- 8. Геометрическая интерпретация теоремы А В ω VBA VB
- 9. В теории плоское движение рассматривают как мгновенно вращательное произвольной точки (т.е. точки параметры которой неизвестны) вокруг
- 10. М О R Вращательное движение
- 11. Теорема о сложении ускорений точек при плоскопараллельном движении тела Ускорение произвольной точки тела при его плоскопараллельном
- 12. Геометрическая интерпретация Теоремы о сложении ускорений
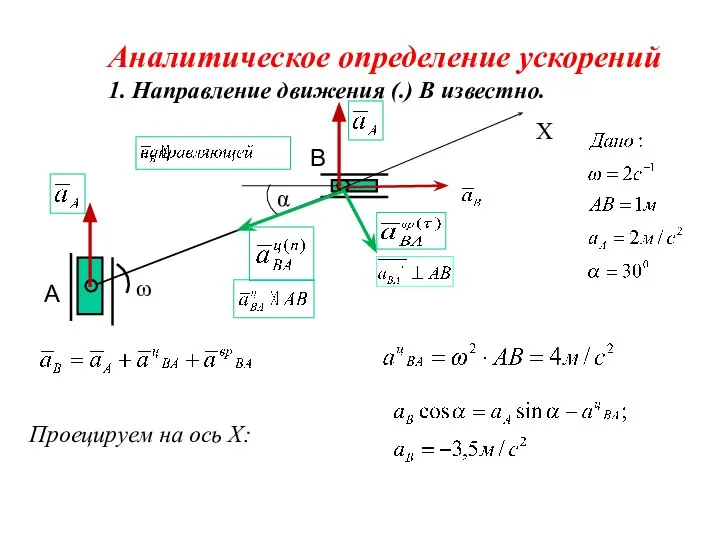
- 13. Аналитическое определение ускорений 1. Направление движения (.) В известно. α ω X Проецируем на ось X:
- 14. 2. Направление аВ не известно. Решаем совместно два уравнения написанные ниже (1) и (2) приравняв их,
- 15. 3. Движение диска без скольжения. Дано: R = 0,5M ω = 2c-1 ; aA = 4M/c2
- 16. Кинематический анализ плоского механизма. Найти для заданного положения механизма скорости и ускорения точек А, В, С,
- 17. Аналитическое определение ускорений (для точки А и В): А В С
- 19. Скачать презентацию
Частный случай сложного движения
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА (ПЛОСКОЕ) =
поступательное +
Частный случай сложного движения ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА (ПЛОСКОЕ) = поступательное +

Общий случай плоскопараллельного движения
О
Общий случай плоскопараллельного движения
О

В теории плоское движение
рассматривают как мгновенно вращательное произвольной точки (т.е.
В теории плоское движение
рассматривают как мгновенно вращательное произвольной точки (т.е.

Вращательное движение
Вращательное движение
Скорость произвольной точки плоской фигуры равна геометрической сумме скорости полюса и
Скорость произвольной точки плоской фигуры равна геометрической сумме скорости полюса и

Геометрическая интерпретация теоремы
А
В
ω
VBA
VB
Геометрическая интерпретация теоремы
А
В
ω
VBA
VB
В теории плоское движение
рассматривают как мгновенно вращательное произвольной точки (т.е.
В теории плоское движение
рассматривают как мгновенно вращательное произвольной точки (т.е.

М
О
R
Вращательное движение
М
О
R
Вращательное движение

Теорема о сложении ускорений точек при плоскопараллельном движении тела
Ускорение произвольной точки
Теорема о сложении ускорений точек при плоскопараллельном движении тела
Ускорение произвольной точки
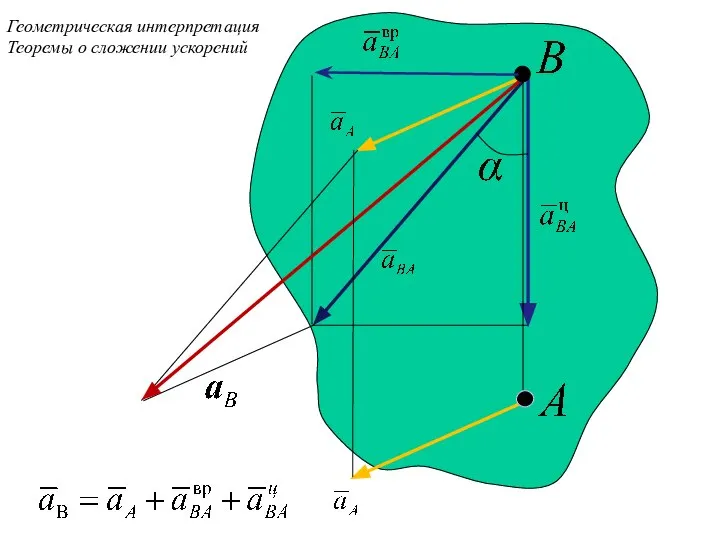
Геометрическая интерпретация
Теоремы о сложении ускорений
Геометрическая интерпретация
Теоремы о сложении ускорений
Аналитическое определение ускорений
1. Направление движения (.) В известно.
α
ω
X
Проецируем на ось X:
А
В
Аналитическое определение ускорений
1. Направление движения (.) В известно.
α
ω
X
Проецируем на ось X:
А
В

2. Направление аВ не известно. Решаем совместно два уравнения написанные ниже
2. Направление аВ не известно. Решаем совместно два уравнения написанные ниже

3. Движение диска без скольжения.
Дано: R = 0,5M
ω = 2c-1 ;
3. Движение диска без скольжения.
Дано: R = 0,5M
ω = 2c-1 ;

Кинематический анализ плоского механизма.
Найти для заданного положения механизма скорости и ускорения
Кинематический анализ плоского механизма. Найти для заданного положения механизма скорости и ускорения

Аналитическое определение ускорений (для точки А и В):
А
В
С
Аналитическое определение ускорений (для точки А и В):
А
В
С
 Вынужденные колебания
Вынужденные колебания Спектральные характеристики рентгеновского излучения
Спектральные характеристики рентгеновского излучения Генератор переменного тока. (11 класс)
Генератор переменного тока. (11 класс) Механічні характеристики асинхронного двигуна
Механічні характеристики асинхронного двигуна Алюминий: физические и химические свойства. Применение алюминия
Алюминий: физические и химические свойства. Применение алюминия Масс-спектрометрия
Масс-спектрометрия Виды устройств РЗ
Виды устройств РЗ Основы молекулярной физики
Основы молекулярной физики Техническая механика. Изгиб - основные понятия, напряжение
Техническая механика. Изгиб - основные понятия, напряжение Современные проблемы физики наноструктурных материалов. Механические свойства и механизмы деформации наноматериалов
Современные проблемы физики наноструктурных материалов. Механические свойства и механизмы деформации наноматериалов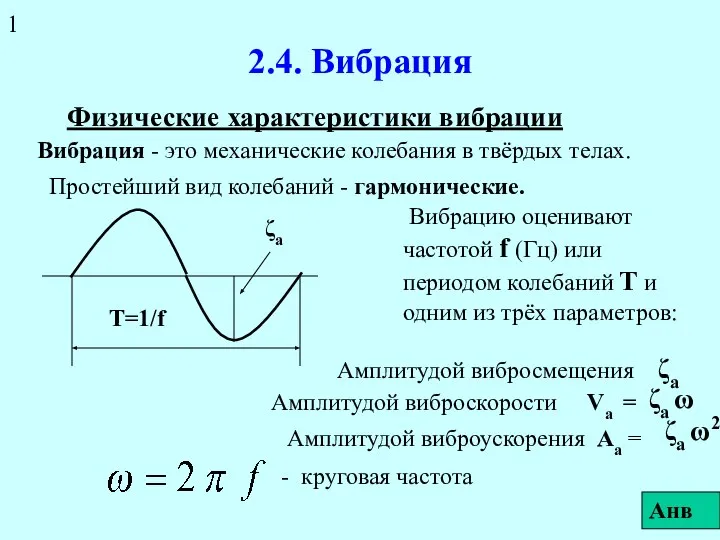 Физические характеристики вибрации
Физические характеристики вибрации Закон Кулона. Напряженность электростатического поля
Закон Кулона. Напряженность электростатического поля Физико-технические основы электроэнергетики. Лекция 10
Физико-технические основы электроэнергетики. Лекция 10 Дмитрий Аполлинариевич Рожанский
Дмитрий Аполлинариевич Рожанский Плотность вещества
Плотность вещества Ускорение материальной точки
Ускорение материальной точки Кинематика материальной точки
Кинематика материальной точки Масс-спектроскопия
Масс-спектроскопия Электромагнитное поле
Электромагнитное поле Презентация по физике Физика твердого тела часть 4
Презентация по физике Физика твердого тела часть 4 Сила. Второй закон Ньютона
Сила. Второй закон Ньютона Реакторы на быстрых нейтронах
Реакторы на быстрых нейтронах Тепловые двигатели
Тепловые двигатели Распространение радиоволн
Распространение радиоволн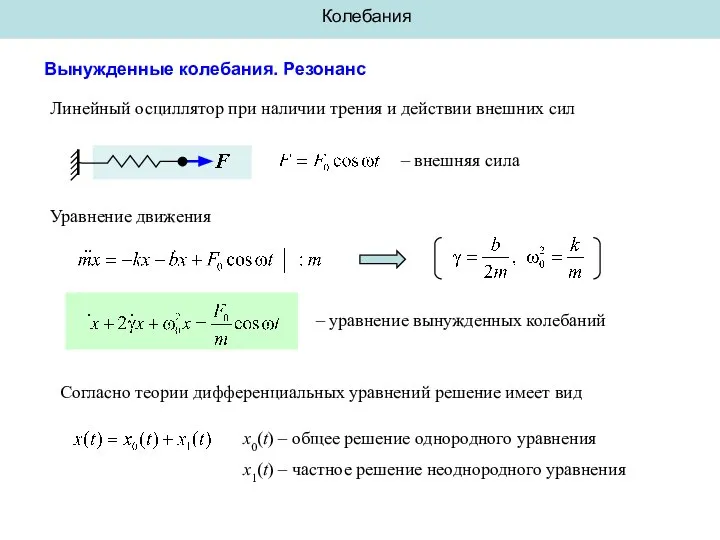 Колебания. Вынужденные колебания. Резонанс
Колебания. Вынужденные колебания. Резонанс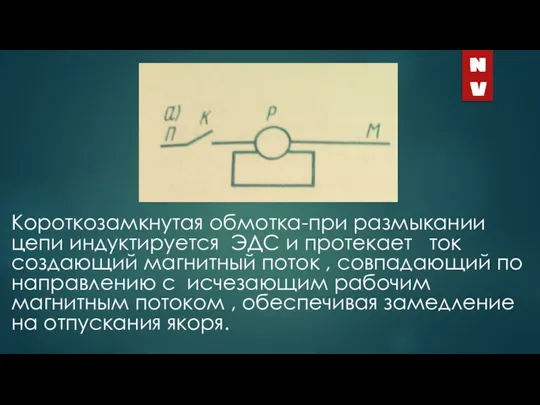 Короткозамкнутая обмотка при размыкании цепи
Короткозамкнутая обмотка при размыкании цепи Ядерная энергетика
Ядерная энергетика Атомное ядро
Атомное ядро